交流伺服驱动器用户手册2
- 格式:doc
- 大小:2.79 MB
- 文档页数:66
力川A6系列交流伺服驱动器用户使用手册目录第一章安全注意事项 (1)第二章电气规格 (1)2.1 规格 (1)2.2 驱动器型号与电机的组合.................................................. 错误!未定义书签。
第三章安装 (2)3.1 伺服驱动单元的安装 (3)3.1.1安装环境 (3)3.1.2安装方法 (3)3.1.3安装尺寸 (4)3.2 伺服电机的安装 (4)3.2.1安装环境 (4)3.2.2安装方法 (4)第四章接线 (5)4.1 端子说明 (5)4.2 主电路配线 (6)4.2.1 主电路端子定义 (6)4.2.2 主电路电源端子(弹簧式)使用方法 (6)4.2.3主电路接线 (7)4.3 接线端子定义 (8)4.3.1 通讯端子定义(CN1/CN2) (8)4.3.2 控制端子定义(NC3) (8)4.3.3 编码器端子定义(NC4) (8)4.4 控制信号端子接线原理 (10)4.4.1 DI输入电路 (10)4.4.2 高速脉冲输入电路 (10)4.4.3 DO输出电路 (11)4.4.4 模拟量输入电路 (12)4.4.5 脉冲反馈输出电路 (12)第五章控制模式说明 (13)5.1 位置模式说明 (13)5.1.1 位置模式接线图 (13)5.1.2 外部位置模式相关功能 (14)5.1.3 位置模式通讯控制 (15)5.2 速度模式说明 (16)5.2.1 速度模式接线图 (16)5.2.2 外部速度模式相关功能 (17)5.2.3 通讯控制切换内部速度 (18)5.3 转矩模式说明 (19)5.3.1 转矩模式接线图 (19)5.3.2 外部转矩模式相关功能 (20)5.4 增益参数调节 (21)5.5 DI/DO口功能配置详细说明 (23)5.5.1 DI功能说明 (23)5.5.2 DO功能说明 (25)5.5.3 DI/DO口极性配置 (26)5.5.4 DI口控制方式 (27)第六章参数说明 (28)6.1 基本参数说明 (28)6.2 扩展参数说明 (42)第七章面板显示与按键说明 (57)7.1 按键界面介绍 (57)7.2 各模式切换示意图 (57)7.3 监视参数切换 (58)7.4操作说明 (60)7.4.1 设置参数 (60)7.4.2 JOG模式 (61)7.4.3 初始化参数 (62)7.4.4 伺服回零点 (62)7.4.5 报警清除 (63)第八章报警说明 (64)第九章 MODBUS RTU协议 (66)9.1 读取参数命令 (66)9.2 写单个寄存器命令(0x06) (67)9.3 写多个寄存器命令(0x10) (67)9.4 响应异常及错误码 (68)9.5 通讯保存参数 (68)附录:伺服回零方式 (69)A6伺服驱动器用户手册-1-第一章安全注意事项使用伺服驱动系统前,请仔细阅读设备相关注意事项,务必遵守安装调试安全预防措施和操作程序。
AE5000交流伺服驱动器用户手册交流伺服驱动器用户手册版本 时间 备注P1A 2013.06 新建P2A 2014.03 1.更新1.2节伺服单元外观说明2.通用伺服轴口按照安川定义,更新了2.2节3.更新了2.3、2.4、2.6节4.更新了3.1节5.更新了第九章P2.1 2014.05 1. 增加了5.5.3增益切换功能描述2. 增加了5.5.4模式开关功能描述3. 把所用的图号及表号去掉4. 增加了摩擦力补偿部分功能描述5. 更新参数列表中参数取值范围P2.2 2015.08 1. 更新了7.1、7.2节中报警部分内容2. 更新了一些文字描述符号最大适用电机容量 kW符号最大适用电机容量 kW 5R55R47R68R61201101801602002103302701.6伺服单元日常维护下面说明伺服单元的维护和检查。
伺服单元不需要日常检查,但对下列事项一年至少需要检查一次以上。
检修项目检查间隔时间检修要领故障情况时的处理外观检修至少每年一次不得有垃圾、灰尘、油迹等请用布擦拭或用气枪清扫螺丝的松动端子排、连接器安装螺丝等不得有松动请进一步紧固引脚编号信号名称类型功能描述1GND输入 地2GND输入 地3__ _4SEN输入 绝对值编码器使能5VCMD+输入 模拟控制+6GND输入 地7 PPULSE+输入P命令+8 PPULSE-输入P命令-9 T_REF输入转矩模拟控制+10 GND输入地11 PDIR+输入P命令方向+12 PDIR-输入P命令方向-13 __ _14 CLR-输入位置清除-15 CLR+输入位置清除+16 __ _17 OZ输出编码器Z信号开路输出18 __ _19 CHZ输出原点信号Z+20 /CHZ输出原点信号Z-21 __ _22 __ _引脚编号信号名称类型功能描述1GND输入 地2GND输入 地3__ _4SEN输入 绝对值编码器使能5-- -6GND输入 地7 PPULSE+输入P命令+8 PPULSE-输入P命令-9 ---10 GND输入地11 PDIR+输入P命令方向+12 PDIR-输入P命令方向-13 __ _14 CLR-输入位置清除-15 CLR+输入位置清除+16 __ _17 OZ输出编码器Z信号开路输出18 __ _19 CHZ输出原点信号Z+20 /CHZ输出原点信号Z-21 __ _22 __ _23 __ _A B CD24V47A B CD按键功能介绍:按键名称功能介绍 MODE/SET 5种工作模式之间循环切换▲/▼ 参数模式:选择参数时,增/减参数号 编辑参数时,增/减参数值 参数管理模式:选择执行的管理功能 监视模式:选择监视菜单 缺省模式:有多个报警时,切换显示多个报警辅助模式:选择辅助功能时,增/减功能号Jog 时,正转或者反转Jog 下编辑速度手动调速时增/减速度◄/DATA短按(时间短于1s ):左向循环移动编辑位长按(时间长于1s ):确认选择的菜单确认执行此功能确认写入编辑的参数有报警产生时,按下此键清除报警注:在参数模式下,修改参数并保存后,参数值被写入RAM中;断电后,修改后的参数值将无法被保存;若要对参数进行保存,按MODE键进行切换,当进入E-SET界面后,按DATA键确认,此时,断电后,修改的参数即可被保存在EEPROM中。

版本:V1.0全数字式交流伺服驱动器适用机型:SP500B/DM500/ADM500安装操作手册 全数字式交流伺服系统目录目录 (1)第一章产品概述 (3)1.1SP500B、DM500、ADM500系列交流伺服驱动器 (3)1.2SJT系列交流伺服电机 (3)第二章产品规格 (4)2.1SP500B、DM500、ADM500伺服驱动器规格 (4)2.1.1 型号说明 (4)2.1.2 规格与性能参数 (5)2.1.3 伺服驱动器安装尺寸图 (6)2.2SJT系列交流伺服电机规格 (8)2.2.1 型号说明 (8)2.2.2 规格与性能参数 (8)2.2.3 安装尺寸图 (10)2.3隔离变压器规格 (13)第三章接线 (14)3.1配线规格要求 (14)3.1.1 电源端子TB (14)3.1.2 编码器接口CN1 (14)3.1.3 控制信号接口CN2 (14)3.2标准接线 (15)3.3SP500B、DM500、DM500A系列伺服驱动器端子信号与功能 (22)3.3.1 电源端子TB (22)3.3.2 编码器接口CN1和控制信号接口CN2 (22)3.4SP500B、DM500、DM500A系列伺服驱动器信号接口电路 (31)3.4.1 开关量NPN型输入接口 (31)3.4.2 开关量单端输出接口 (32)3.4.3 开关量双端输出接口 (33)3.4.4 脉冲量输入接口 (34)3.4.5 增量式光电编码器输入接口 (35)3.4.6 位置反馈输出接口 (36)3.5SJT系列伺服电机端子信号与功能 (36)第四章操作与显示 (37)4.1键盘操作 (37)4.2参数设置(PA-) (37)4.3参数监视(D P-) (38)4.4参数管理(EE-) (39)4.5速度试运行(S R-) (40)4.6JOG点动运行(J R-) (40)第五章参数 (41)5.1参数简介 (41)5.2参数内容及意义 (43)第六章功能应用 (47)6.1基本性能参数的调试 (47)6.2伺服电机旋转方向的切换 (49)6.3电子齿轮的设置 (49)6.4启停特性的调整 (50)6.5驱动器更换配套伺服电机 (50)6.6控制方式的应用 (51)6.6.1 脉冲位置控制方式(PA3=0)与脉冲速度控制方式(PA3=4) (51)6.6.2 内部速度控制方式(PA3=1) (51)6.6.3 主轴控制方式(PA3=5) (52)6.6.4 速度/位置控制方式(PA3=6) (54)6.7使能与报警时序图 (56)6.8抱闸应用 (57)6.8.1 松闸流程 (58)6.8.2 抱闸流程 (58)第七章故障诊断 (61)7.1保护诊断功能 (61)7.2故障分析 (62)7.3驱动器故障解决 (64)第八章保养与维护 (65)第一章产品概述1.1 SP500B、DM500、ADM500系列交流伺服驱动器SP500B、DM500、ADM500系列全数字式交流伺服驱动器为本公司自主研发生产,具有集成度高、体积小、响应速度快、保护完善、可靠性高、易于安装等一系列优点。
RuiHe制 造 商: 珠海瑞合电气有限公司 电 话: 86-756-2211557、2212076 地 址: 珠海市凤凰北路1号珠都国际广场A-706 传 真: 86-756-21188851交流伺服驱动器用户手册(PSDA -1023A1)V ersion 1.0珠海瑞合电气有限公司RuiHe制 造 商: 珠海瑞合电气有限公司 电 话: 86-756-2211557、2212076 地 址: 珠海市凤凰北路1号珠都国际广场A-706 传 真: 86-756-21188852目录一. 概述 二. 前言三. 技术参数及硬件安装3.1PSDA 系列交流伺服驱动器型号的表示方法 3.2 性能指标 3.3 外形尺寸3.4 安装注意事项:四. 接口连线及控制信号4.1 总接线图4.2 反馈信号连接器CON1管脚定义 4.3 编码器反馈信号处理4.4 控制输入连接器管脚定义 4.5 控制信号输入输出处理4.6 采用驱动器提供的电源组成控制信号4.7 采用驱动器提供的电源组成模拟指令输入五. 显示及键盘操作5.1 监视方式 5.2 键盘操作5.3 利用键盘修改和设定参数 5.4 参数的设定及修改原则 5.5 参数说明:5.6 输入端子取反控制字对应关系表 5.7 利用速度选择端子选择内部速度六. 出错信息及处理6.1 出错代码表 6.2 电源接通时序图 6.3 报警时序图6.4驱动器过负载特性七. 计算机监控软件7.1 启动软件7.2察看输入输出端口状态RuiHe制 造 商: 珠海瑞合电气有限公司 电 话: 86-756-2211557、2212076 地 址: 珠海市凤凰北路1号珠都国际广场A-706 传 真: 86-756-211888537.3 如何修改参数?7.4 波形实时察看驱动器运行的相关实时数据RuiHe制 造 商: 珠海瑞合电气有限公司 电 话: 86-756-2211557、2212076 地 址: 珠海市凤凰北路1号珠都国际广场A-706 传 真: 86-756-21188854一、 概述PSDA-1023A1交流伺服电机驱动器是珠海瑞合电气有限公司为配合现代化工业自动控制领域而自主研发的新一代交流伺服驱动器,主要采用国际最新电机专用数字处理器DSP 为核心配以高速度数字逻辑芯片,高品质功率模块而组成,具有集成度高,体积小,响应速度快,保护完善,可靠性高等一系列优点。
ES2-BFI系列交流伺服驱动器用户手册(精简版 V1.2)2022-03-02深圳市研控自动化科技有限公司目录目录 (1)第一章伺服系统选型 (2)1.1 驱动器规格 (2)1.2 伺服电机及驱动器型号说明 (3)1.3 伺服驱动器和伺服电机配套一览表 (4)1.4 配套电机参数 (4)1.5 配套线缆 (5)1.6 配件包 (7)第二章产品外形尺寸及安装 (8)2.1 伺服驱动器外形尺寸 (8)2.2 伺服驱动器的安装 (8)第三章伺服驱动器与电机连接 (9)3.1 系统结构图 (9)3.2 主回路 (10)3.3 动力线及抱闸接口 (10)3.4编码器接口 (10)3.5 控制信号CN1 (12)3.6 通信信号 (19)第四章面板显示 (20)4.1 面板操作器说明 (20)第五章控制 (23)5.1 基本控制 (23)5.2 位置控制模式 (35)5.3 速度控制模式 (66)第六章运行性能调整 (73)6.1 概述 (73)6.2 离线惯量辨识 (73)6.3 增益调整 (76)6.4 指令滤波调整 (79)6.5 不同模式下的调整参数 (79)第七章辅助功能 (81)7.1.JOG运行 (81)7.2 报警复位 (82)7.3 参数初始化 (83)7.4 数字信号强制输入输出功能 (84)第八章故障及处理 (86)8.1 故障诊断及处理措施 (86)8.2 警告的原因及处理措施 (88)第九章参数一览 (89)9.1参数组号 (89)9.2各组参数 (90)附录A:版本变更记录 (110)第一章伺服系统选型1.1 驱动器规格表1-1 ES2 BFI系列伺服驱动器基本规格1.2 伺服电机及驱动器型号说明1.2.1驱动器型号说明ES2 - 04 - B F I - XX图1-1 驱动器命名规则1.2.2伺服电机型号说明ASM J - 08 - 10 30 B - U 3 2 1 XX图1-2 电机命名规则1.3 伺服驱动器和伺服电机配套一览表表1-2 伺服驱动器与电机配套表1.4 配套电机参数表1-3 电机电机参数表1.5 配套线缆电机动力线命名规则如下图1-3 动力线命名规则电机动力线结构图如下表。

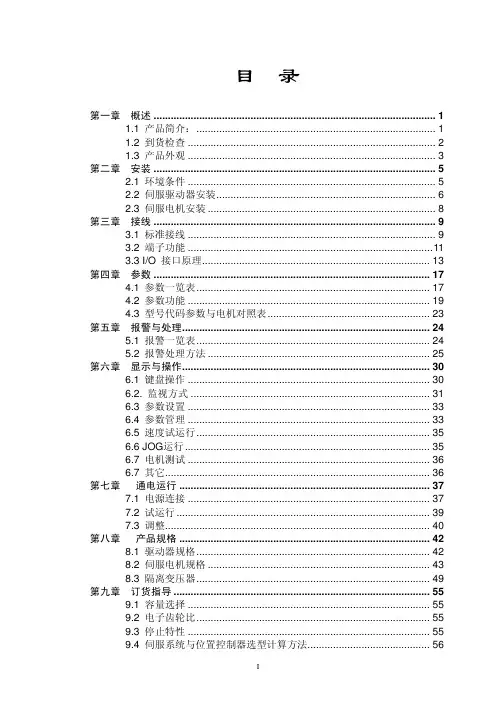
交流伺服驱动器使用手册目录第一章概述1.1产品介绍 (1)1.2产品外观 (2)1.3与安全有关的符号说明 (3)1.4警告标志的内容 (4)1.5安全注意事项 (4)1.6到货检查 (7)第二章产品规格2.1 驱动器规格 (8)2.2电机规格 (9)2.3隔离变压器 (14)第三章安装3.1 环境条件 (15)3.2 伺服驱动器安装 (16)3.3伺服电机安装 (18)第四章接线4.1标准接线 (20)4.2端子功能 (22)4.3 I/O 接口原理 (26)4.4 伺服电机接线 (29)第五章显示与操作5.1键盘操作 (31)5.2. 监视方式 (32)5.3 参数设置 (35)5.4 参数管理 (36)5.5 速度试运行.................................................................. .39 5.6 JOG运行.. (39)5.7电机测试 (40)5.8 其它 (40)目录第六章通电运行6.1 电源的连接 (41)6.2 通电试运行 (43)6.3 参数调整 (45)第七章参数7.1 参数一览表 (48)7.2 参数功能 (50)第八章报警与处理8.1 报警一览表 (59)8.2 报警处理方法 (60)第九章常见问题9.1 常见问题报警.............................................................. ..67 9.2 频繁出现Err-15、Err-30、Err-31、Err-32报警.. (67)9.3 型号代码参数与电机对照表 (68)交流伺服驱动器使用手册第一章概述1.1 产品简介:随着交流伺服技术的成熟稳定,产品性能不断提高,适应工业控制向高速度、高精度、高效率、数字智能化方向发展,同时随着伺服产品性价比的不断提升,伺服控制替代步进控制已成为产业发展趋势。
交流伺服技术已从军工航空航天领域广泛深入地渗透到各行各业,广泛应用于数控机床、纺织机械、轻工机械、网版印刷、包装机械、自动生产线等自动化领域。
H100系列交流伺服系统使用手册2021年01月目录1.概述 (4)1.1.产品简介 (4)1.2.型号定义 (4)1.3.应用功能 (4)1.4.硬件规格参数 (5)2.安装 (6)2.1.存储 (6)2.2.外形尺寸 (6)2.3.注意事项 (6)2.4.安装 (7)3.连接 (8)3.1.标准接线 (8)3.2.端口说明 (11)3.3.IO接口原理 (14)4.显示与操作 (20)4.1.显示面板介绍 (20)4.2.菜单概述 (20)4.3.状态监控(d-) (21)4.4.参数设置(F-) (22)4.5.辅助功能(A-) (22)5.参数设定 (23)5.1.参数分组一览表 (23)5.2.参数功能详解 (23)5.3.参数总表 (42)6.功能使用 (55)6.1.通用基本功能 (55)6.2.位置控制 (59)6.3.速度控制 (61)6.4.转矩控制 (62)6.5.单轴控制 (62)7.Modbus通信 (68)7.1.通讯配置 (68)7.2.协议格式 (68)8.故障处理 (71)8.1.报警显示一览表 (71)8.2.其他报警显示一览表 (73)版本说明•关于手册本手册包含了驱动器的硬件端口,软件功能描述,以及标准程序的功能码表等内容。
本手册适用于H100系列伺服驱动器的配套使用。
使用本手册的前提是假定您已购买上述提到的相关产品,并具有相关的基础知识。
如果有存在疑问的地方,请联系咨询我司技术部门。
由于驱动器软件程序跟随市场需求随时更新,本手册包含的功能码表及其他内容描述有可能不是最新的,但基础功能和通信协议是一致的。
本公司拥有本手册内容的最终解释权。
•安全注意危险!◆本设备带有危险电压,与警告不符或违反本手册的操作可能带来生命危险和人身伤害。
只有专业人员,在熟悉了本手册的安全事项和安装操作之后,才能实际操作运行本设备。
◆实施配线、检查等作业,必须关闭电源。
指示灯熄灭后5分钟之内,请勿触碰机内电路板及接线端子。
交流伺服电机驱动器使用说明书1.特点●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制●脉冲序列、速度、转矩多种指令及其组合控制●转速、转矩实时动态显示●完善的自诊断保护功能,免维护型产品●交流同步全封闭伺服电机适应各种恶劣环境●体积小、重量轻2.指标●输入电源三相200V -10%~+15% 50/60HZ●控制方法IGBT PWM(正弦波)●反馈增量式编码器(2500P/r)●控制输入伺服-ON 报警清除CW、CCW驱动、静止●指令输入输入电压±10V●控制电源DC12~24V 最大200mA●保护功能OU LU OS OL OH REG OC STCPU错误,DSP错误,系统错误●通讯RS232C●频率特性200Hz或更高(Jm=Jc时)●体积L250 ×W85 ×H205●重量 3.8Kg3.原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4.接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2具体见接线图34.2 CN SIG 连接器[具体见接线图4●驱动器和电机之间的电缆长度最大20M●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J脚●若电缆长于10M,则编码器电源线+5V、0V应接双线4.3 CN I/F 连接●控制器等周边设备与驱动器之间距离最大为3M●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起●COM+和COM-之间的控制电源(V DC)由用户供给●控制信号输出端子可以接受最大24V或50mA;不要施加超过此限位的电压和电流●若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。