航带法解析空中三角测量
- 格式:ppt
- 大小:1.03 MB
- 文档页数:10



空中三角测量的总结姓名:关诚昱学号:201105070206专业:遥感科学与技术指导老师:曾涛1.解析空中三角测量空中三角测量是立体摄影测量中,根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法。
其主要目的是为缺少野外控制点的地区测图提供绝对定向的控制点。
空中三角测量一般分为两种:模拟空中三角测量即光学机械法空中三角测量;解析空中三角测量即俗称的电算加密。
模拟空中三角测量是在全能型立体测量仪器(如多倍仪)上进行的空中三角测量。
它是在仪器上恢复与摄影时相似或相应的航线立体模型,根据测图需要选定加密点,并测定其高程和平面位置。
解析空中三角测量是指用计算的方法,根据遥感像片上量测的像点坐标和少量地面控制点,采用较严密的数学公式,按最小二乘法原理,用数字电子计算机解算待定点的平面坐标和高程。
20世纪40年代,随着电子计算机的发明和应用,解析空中三角测量首先在英国的军事测量局投入应用。
20世纪60年代以来,由于电子计算机技术和计算数学的发展,解析空中三角测量取得了长足的进步,形成了一套比较完善的测算方法。
由于精度高,效果好,解析空中三角测量被认为是测地定位的一种精密方法。
解析空中三角测量目前常用的方法是区域网平差。
区域网平差是指在由多条航线连接成的区域内进行控制点加密,并对加密点的平面坐标和高程进行的整体平差。
按照构网的方法和平差单元的划分,区域网平差的基本方法有:航线法、独立模型法和光束法。
相等,又要使各模型点坐标(此时作为观测值看待)改正数的平方和为最小,从而最后获得全区域网加密点的地面坐标。
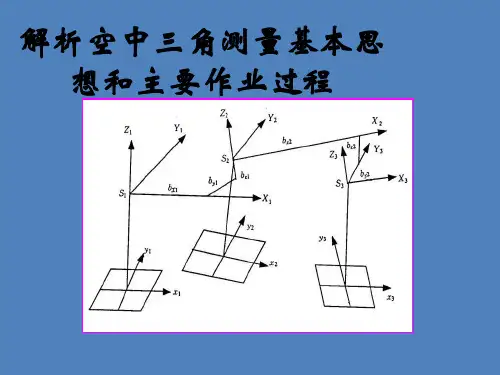
2.航带法区域网空中三角测量这种方法基本上模仿模拟法空中三角测量建立单航带的过程,也就是通过计算相对定向元素和模型点坐标建立单个模型,利用相邻模型间公共连接点进行模型连接运算,以建立比例尺统一的航带立体模型。
这样由各单条航线独立地建立各自的航带模型。
每个航带模型单元要各自概略置平并统一在一个共同的坐标系中,最后进行整体平差运算。