第三章 解析空中三角测量
- 格式:ppt
- 大小:514.50 KB
- 文档页数:113

解析空中三角测量名词解释空中三角测量(AirTriangulation)是一种遥感测量技术,它已经广泛用于地理空间数据收集和测量。
它可以非常有效地收集某一地理区域的空间信息,也可以用于测量地理元素的变化,如水体范围、森林类型和绿地的变化。
这种测量技术在飞行任务时,能够获取更多的数据,从而更有效地完成测量任务。
空中三角测量技术基于对三个空间点的距离的测量,其中两个点位于空中,第三个点位于地面。
根据已知的两个距离和角度,就可以推断出第三个空间点的位置。
根据这一原理,空中三角测量能够测量出实物距离,这样就能够获得地理信息,而不需要考虑地形因素。
空中三角测量技术能够很密集的获取数据,收集的数据可以用来生成高精度的三维地图,用于仿真、地形分析、缓冲区分析、距离测量等。
在距离测量方面,空中三角测量技术可以用于测量路径、高度差和物体或地物间的距离。
在空中三角测量中,被测试的三点中至少一点要在飞机上,飞机测量由一个或多个引导设备(Guidance)控制,以确保测量距离和方向的准确。
空中三角测量中还会使用一些设备进行分析,如数字化地形系统(DTM)和遥感仪器,以收集空中测量的信息,以及地面测量的信息。
空中三角测量技术相对于地面测量具有很多优势,其中最重要的是它可以收集更多的数据,而且收集的数据的质量也更高,而且测量速度更快,可以大大缩短测量任务的时间。
总之,空中三角测量是一种非常有用的遥感测量技术,它可以准确快速地收集某一地理区域的高精度空间信息,而且不受地形影响,可以全面反映地理元素的变化。
此外,空中三角测量技术可以用于多种应用,它可以用于生成高精度三维地图,用于仿真、地形分析、缓冲区分析、距离测量等。
由于空中三角测量技术的优势,它已经成为地理信息的重要组成部分,并且广泛用于地理空间数据收集和测量。

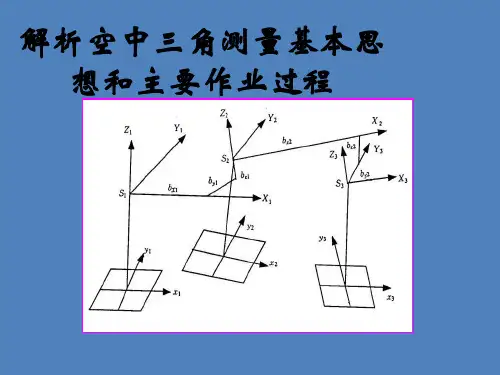
解析空中三角测量摘要:解析空中三角测量通常采用的平差模型可分为航带法,独立模型法和光束法,若按加密区域来分,又可分为单航带法和区域网法。
从而解析空中三角测量的提出最大限度的减少了外业的工作。
重要词:航带法,独立模型法,光束法。
绪论解析空中三角测量:即在一条航带几十个像对覆盖的区域或由几条航带几百个像对构成的区域内,仅仅由外业实测几个少量的控制点,按一定的数学模型,平差解算出(加密)摄影作业过程中所需的全部控制点(称待定点或加密点)及每张相片的外方位元素。
1.航带网法空中三角测量1.1概述:在一条航带内,首先用立体相对按连续法建立单个模型,再把单个模型连续成航带模型,构成航带自由网,再把航带模型视为一个单元模型进行航带网的绝对定向。
由于单个模型构成的航带模型的过程中,不可避免的存在误差,同时还要受到误差积累的影响,致使航带模型产生非线性形变。
所以,航带模型绝对定向后,还要进行航带模型的非线性改正,最终求出加密点的地面坐标。
1.2航带网法空中三角测量的建网过程1.2.1建立航带模型1.2.2航带模型的绝对定向1.2.3航带模型的非线性改正1.3航带网法区域网平差1.3.1步骤:1)按单航带模型法分别建立航带模型,以取得各航带模型点在本航带统一的辅助坐标系中的坐标值。
2)各航带模型的绝对定向3)计算重心坐标及重心化坐标4)根据模型中控制点的加密坐标与外业实测坐标相等以及相邻航带间公共连接点的坐标相应相等为条件,列出误差方程,并用最小二乘准则平差计算,整体求解各航带的非线性改正系数。
5)用平差计算得出多项式系数,分别计算各模型点改正后的坐标值。
2.独立模型法区域网空中三角测量2.1基本思想独立模型法区域网中三角测量是基于单独法相对定向建立单个立体模型,再有一个个单模型相互连接组成一个区域网。
2.2数学模型按单独法相对定向列出2.2.3作业流程1)单独法相对定向建立单元模型,获取各单元的模型的模型坐标,包括摄站点。
![[院校资料]正式--第三章下_解析空中三角测量](https://uimg.taocdn.com/e75031e69a89680203d8ce2f0066f5335a81679b.webp)