CREO 机构的运动仿真与分析(业界精制)
- 格式:ppt
- 大小:3.19 MB
- 文档页数:52

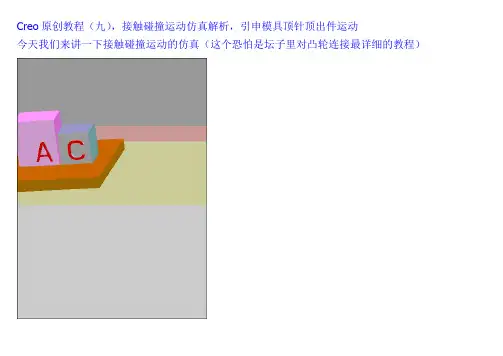
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动今天我们来讲一下接触碰撞运动的仿真(这个恐怕是坛子里对凸轮连接最详细的教程)之前很多人pm还有在qq群问我说做模具顶出件运动怎么做,我直接回答用凸轮连接对设置连接,启用升离,再启用重力就可以了,这样还是有很多人不太明白,其这个东西听着很简单,里面还有很多的窍门和方法再加上一些经验,只要你看过了本教程,再加上平时多联系,相信接触碰撞这里,一般的问题都可以解决了,我们来看一下,以前的2001版本以前方针分析里面比较简单,简单的方针都可以做到,但是到了野火版本以后,功能提升了好多,在野火中有三种特殊的连接,可以设置特殊连接后进行各种分析,这三种连接分别为凸轮副连接,槽连接,齿轮运动副连接,今天讲的是接触碰撞的仿真,主要用到的是凸轮的链接,所以只讲凸轮,齿轮和槽连接以后再讲。
顶针顶出件运动仿真,其实就是在顶针头部和接触的件之间建立一个凸轮连接,有人会问,顶针和件是两个平面与平面相碰,怎么建立凸轮,在凸轮连接时,里面有一些技巧,尤其是建立曲面和选择曲面时,技巧性比较强,相信很多高手有些时候都那凸轮连接因没有选择好曲面或是没有建立好曲面,导致仿真多次失败。
我们先看一下凸轮的链接设置1 “凸轮1”选项卡:定义第一个凸轮(1)“曲面/曲线”:单击箭头选取曲线或曲面定义凸轮工作面,在选取曲面时若钩选自动选取复选框则系统自动选取与所选曲面相邻的任何曲面,凸轮与另一凸轮相互作用的一侧由凸轮的法线方向指示。
如果选取开放的曲线或曲面,会出现一个洋红色的箭头,从相互作用的侧开始延伸,指示凸轮的法向。
选取的曲线或边是直的,“机械设计模块”会提示选取同一主体上的点、顶点、平面实体表面或基准平面以定义凸轮的工作面。
所选的点不能在所选的线上。
工作面中会出现一个洋红色箭头,指凸轮法向。
3“属性选项卡”(1)升离:启用升离允许凸轮从动机构连接在拖动操作或分析运行期间分离e在0-1之间(2)摩擦:Us静摩擦系数Uk 动摩擦系数静摩擦系数应大于动摩擦系数举例:1.建立连个立方体和一个平板2.建立一个组件,平板默认装配,立方体A平面约束,front面和平板的front面,A的下表面和板的上表面,再装配C,C的front面和平板的front面设置平面约束,然后用手鼠标拖动C,让C的下表面大体能够贴在平板的上表面即可,让A和C有点距离。
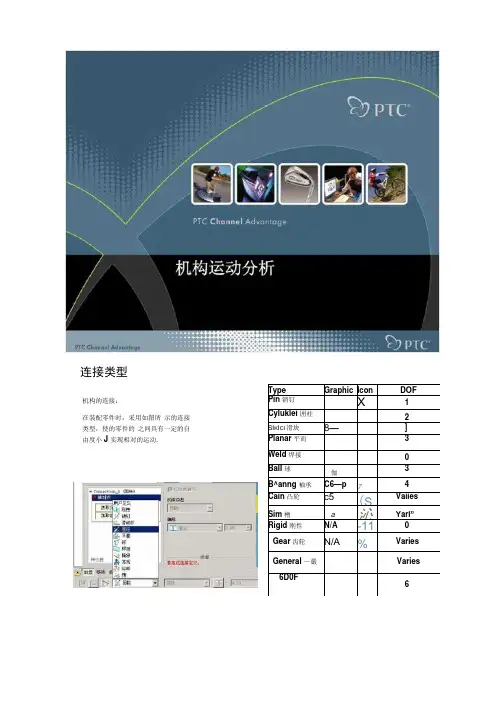
连接类型机构的连接:在装配零件时,采用如图所示的连接类型,使的零件的之间具有一定的自由度小J 实现相对的运动. Type Graphic Icon DOF Pin销钉X1 Cyluklei 囲柱2 SI K I CI滑块8—] Planar平而3Weld焊接0 Ball 球伽3B^anng袖承C6—p74 Cain凸轮c5(S Vaiies Sim槽a沁Yari”Rigid刚性N/A-110 Gear齿轮N/A%Varies General —嚴Varies6D0F6连接类型销钉连接 mdo\connections\pin&cylinder♦轴对齐/插入曲面.平面匹配/对齐或点对齐(径向)汪:即允许绕着指定的轴逬行旋转的连接•共1个自由度. 注:即允许绕着指定的轴迸行旋转和平移的连接,共2个 自由度.连接类型滑动杆连接 mdo\co nnections'slider♦轴对齐/插入曲面♦平面匹配/对齐或点对齐帥向) 注:即允许沿着指定的轴逬行平移的连接 总共1个自由度.平面连接 mdo\connections\plane♦平面匹配/对齐汪:即允许沿着1轴旋转和沿2轴方向平移 总共3个自由度.PTC Channel Advantoge••••W PTC*圆拄连接♦轴对齐/插入曲面平面连接销钉连接11拄连接滑块连接连接类型焊接连接两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一 个主体■相互之间不再有自由度。
如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系按其原有自由度的作用。
总自由度 为0。
刚性连接使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与 组件成为一个主体,相互之间不再有自由度.如果将一个子组件与组件 用刚性连接,子组件内各零件也将一起被"粘〃住,其原有自由度不起作 用。
总自由度为0。
PTC Channel Advanlogc•••••W PTC*连接类型 球连接点与点对齐注:即允许绕着任意方向旋转的连接,总3个自由度轴承连接点在轴/曲线上注:它与机械上的“轴承”不同,它是元件(或组件)上 的一个点对齐到组件(或元件)上的一条直边或轴线 上,因此元件可沿轴线平移并任意方向旋转,具有1 个平移自由度和3个旋转自由度,总自由度为4拖拽当机构连接好以后,可以通过拖拽功能,使元件间产生 相对运动. 使用快照使剃拖动“(Dfdg )对话框中的•快照气Snapshots )迭项卡可显示不同配 置组件的己保存快範的列表。

Creo动态机构仿真操作⼿册完整版C r e o动态机构仿真操作⼿册HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】Creo2.0动态机构仿真操作⼿册1 范围本标准规定了Creo2.0动态机构仿真建模⽅法及思路。
本标准适⽤于公司产品结构设计选⽤。
2 Creo2.0机构模块简介在进⾏机械设计时,建⽴模型后设计者往往需要通过虚拟的⼿段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的⽬的。
对于提⾼设计效率降低成本有很⼤的作⽤。
Creo Parametric 2.0中“机构”模块是专门⽤来进⾏运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个⽅⾯的分析功能。
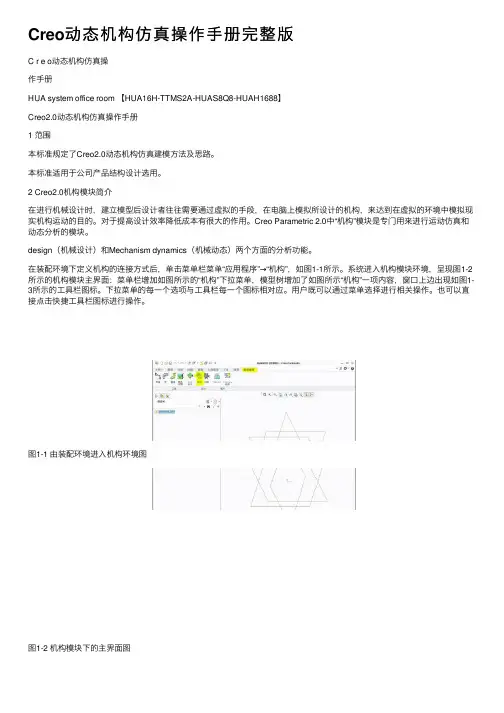
在装配环境下定义机构的连接⽅式后,单击菜单栏菜单“应⽤程序”→“机构”,如图1-1所⽰。
系统进⼊机构模块环境,呈现图1-2所⽰的机构模块主界⾯:菜单栏增加如图所⽰的“机构”下拉菜单,模型树增加了如图所⽰“机构”⼀项内容,窗⼝上边出现如图1-3所⽰的⼯具栏图标。
下拉菜单的每⼀个选项与⼯具栏每⼀个图标相对应。
⽤户既可以通过菜单选择进⾏相关操作。
也可以直接点击快捷⼯具栏图标进⾏操作。
图1-1 由装配环境进⼊机构环境图图1-2 机构模块下的主界⾯图图1-3 机构菜单图1-4 模型树菜单如图 1-4所⽰的“机构树”⼯具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使⽤此对话框可定义零参照、再⽣值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使⽤此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使⽤此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使⽤此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
Creo动态机构仿真操作手册Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。