仿射变换参数估计介绍
- 格式:pdf
- 大小:834.84 KB
- 文档页数:25

图像配准中仿射变换参数优化方案一、图像配准技术概述图像配准技术是图像处理领域中的一项重要技术,它涉及将两幅或多幅图像按照一定的几何关系对齐,以便于进行后续的分析和处理。
在实际应用中,图像配准技术广泛应用于医学成像、遥感图像分析、计算机视觉等领域。
图像配准的关键在于如何准确地确定图像之间的几何变换关系,其中仿射变换是一种常用的几何变换形式。
1.1 仿射变换的定义仿射变换是一种二维图像变换方法,它能够保持图像中的直线、平行线和点的共线性不变。
仿射变换可以用一个6参数的矩阵来表示,包括平移、旋转、缩放和剪切等变换。
在图像配准中,通过优化这些参数,可以使两幅图像在几何上尽可能地对齐。
1.2 仿射变换的应用场景仿射变换在图像配准中的应用场景非常广泛,例如:- 医学成像:在进行CT、MRI等医学图像分析时,需要将不同时间点或不同角度拍摄的图像进行配准,以便进行病变的跟踪和分析。
- 遥感图像:在遥感图像处理中,需要将不同时间或不同传感器获取的图像进行配准,以便于进行地表变化检测和分析。
- 计算机视觉:在机器视觉和自动驾驶系统中,需要对摄像头捕获的图像进行配准,以实现物体的识别和跟踪。
二、仿射变换参数优化的重要性在图像配准过程中,仿射变换参数的优化是实现高精度配准的关键。
参数优化的目标是最小化两幅图像之间的差异,这通常通过定义一个代价函数来实现,该函数衡量了图像之间的相似度或差异度。
2.1 代价函数的选择代价函数的选择对参数优化的效果有着直接的影响。
常见的代价函数包括:- 均方误差(MSE):计算两幅图像对应像素点的灰度值差的平方和,常用于灰度图像的配准。
- 互相关(Cross-Correlation):计算两幅图像的局部区域之间的相似度,常用于特征不明显的图像配准。
- 归一化互相关(Normalized Cross-Correlation, NCC):在互相关的基础上进行归一化处理,提高了配准的鲁棒性。
2.2 参数优化算法参数优化算法是实现仿射变换参数优化的核心,常用的算法包括:- 梯度下降法:通过计算代价函数的梯度来迭代更新参数,直至找到最小值。
仿射变换详解warpAffine今天遇到一个问题是关于仿射变换的,但是由于没有将仿射变换的具体原理型明白,看别人的代码看的很费解,最后终于在师兄的帮助下将原理弄明白了,我觉得最重要的是理解仿射变换可以看成是几种简单变换的复合实现,具体实现形式即将几种简单变换的变换矩阵M相乘,这样就很容易理解啦定义:仿射变换的功能是从二维坐标到二维坐标之间的线性变换,且保持二维图形的“平直性”和“平行性”。
仿射变换可以通过一系列的原子变换的复合来实现,包括平移,缩放,翻转,旋转和剪切。
这类变换可以用一个3*3的矩阵M来表示,其最后一行为(0,0,1)。
该变换矩阵将原坐标为(x,y)变换为新坐标(x',y'),即OpenCV中相应的函数是:void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize,int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, constScalar& borderValue=Scalar())¶Parameters:∙src –input image.∙dst –output image that has the size dsize and the same type as src .∙M – transformation matrix,最重要的东东了,本文中着重讲M的构造∙dsize –size of the output image.ansformation ( ).∙borderMode – pixel extrapolation method (see borderInterpolate()); when borderM ode=BORDER_TRANSPARENT , it means that the pixels in the destination image correspon ding to the “outliers” in the source image are not modifi ed by the function.∙borderValue –value used in case of a constant border; by default, it is 0.下面介绍一些典型的仿射变换:(1)平移,将每一点移到到(x+t , y+t),变换矩阵为(2)缩放变换将每一点的横坐标放大或缩小s x倍,纵坐标放大(缩小)到s y倍,变换矩阵为(3)旋转变换原点:目标图形围绕原点顺时针旋转Θ 弧度,变换矩阵为(4) 旋转变换:目标图形以(x , y )为轴心顺时针旋转θ弧度,变换矩阵为相当于两次平移与一次原点旋转变换的复合,即先将轴心(x,y)移到到原点,然后做旋转变换,最后将图片的左上角置为图片的原点,即有的人可能会说为什么这么复杂呢,那是因为在opencv的图像处理中,所有对图像的处理都是从原点进行的,而图像的原点默认为图像的左上角,而我们对图像作旋转处理时一般以图像的中点为轴心,因此就需要做如下处理如果你觉得这样很麻烦,可以使用opencv中自带的Mat getRotationMatrix2D(Point2f center, double angle, double scale)函数获得变换矩阵M,center:旋转中心angle:旋转弧度,一定要将角度转换成弧度scale:缩放尺度它得到的矩阵是:其中α = scale * cos( angle ) , β = scale* sing( angle ) , ( center.x , center.y ) 表示旋转轴心但是不得不说opencv的文档以及相关书籍中都把这个矩阵写错了,如下:建议大家自己通过下式验证一下,即首先将轴心(x,y)移到原点,然后做旋转平绽放变换,最后再将图像的左上角转换为原点没有去研究该函数的源码,不晓得源码中到底怎么写的,但是在别人的博客中看到这个函数貌似需要修正opencv中还有一个函数:Mat getAffineTransform(InputArray src, InputArray dst)¶它通过三组点对就可以获得它们之间的仿射变换,如果我们在一组图像变换中知道变换后的三组点,那么我们就可以利用该函数求得变换矩阵,然后对整张图片进行仿射变换还有一种与仿射变换经常混淆的变换为透视变换,透视变换需要四组点对才能确定变换矩阵,由于仿射变换保持“平直性”与“平行性”,因此只需要三组点对,而透视变换没有这种约束,故需要四组点对warpPerspective函数主要作用:对图像进行透视变换,就是变形函数的调用形式:C++:void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize,int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, constScalar& borderValue=Scalar())参数详解:InputArray src:输入的图像OutputArray dst:输出的图像InputArray M:透视变换的矩阵Size dsize:输出图像的大小int flags=INTER_LINEAR:输出图像的插值方法,combination of interpolation methods (INTER_LINEAR or INTER_NEAREST) and the optionalflag WARP_INVERSE_MAP, that sets M as the inverse transformation ( )int borderMode=BORDER_CONSTANT:图像边界的处理方式const Scalar& borderValue=Scalar():边界的颜色设置,一般默认是0函数原理:透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。
仿射变换的原理及其误差纠正的方法仿射变换是计算机视觉和图形处理领域中常用的一种变换方法,可以对图像进行平移、缩放、旋转和倾斜等操作。
在实际应用中,由于图像采集设备的误差和图像本身的畸变等因素,会导致仿射变换后的图像出现误差。
本文将介绍仿射变换的原理以及常见的误差纠正方法。
一、仿射变换的原理仿射变换是一种线性变换,它可以用矩阵相乘的形式表示。
给定一个二维坐标系上的点P(x, y),经过仿射变换后的新点P'(x', y')可以表示为:\[ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} a & b & c \\ d & e & f \\ 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ 1\end{bmatrix} \]矩阵\[ \begin{bmatrix} a & b & c \\ d & e & f \\ 0 & 0 & 1 \end{bmatrix} \]表示了仿射变换的矩阵形式。
矩阵中的a、b、c、d、e、f分别代表了平移、缩放、旋转和倾斜的参数,通过调整这些参数可以实现对图像的各种变换。
二、误差纠正方法1. 直线误差纠正在进行仿射变换后,原本在图像上的直线可能会出现畸变,呈现为曲线或者扭曲。
为了纠正这种误差,可以利用直线的特性来进行纠正。
通过检测图像中的直线,并计算仿射变换后的直线方程,然后通过调整变换矩阵的参数来使得变换后的直线更接近于真实的直线,从而达到误差纠正的目的。
2. 四边形畸变校正在仿射变换中,四边形可能会出现形变或者畸变的情况,这时需要对四边形进行畸变校正。
一种常见的方法是通过寻找四边形的内部特征点,利用这些特征点来计算仿射变换的变换矩阵,然后对四边形进行变换,使得畸变被纠正。
射影变换的基本知识定义设为平面上的四个共线点,称两个单比和的比为这四点的交比或复比,记作,其中和称为基础点对,和称为分点对。
定义如果四点的交比,则称点对和调和分离点对和,或称点对与点对调和共轭,这时也称为的第四调和点,交比值称为调和比。
定理:中心射影保持共线四点的交比不变证明:如图为射影中心直线上任意四点在中心射影下的像分别是直线上的设的垂直于的高长度为,的垂直于的长度为则于是同理于是故定义如果平面上的点变换使共线三点还变成共线三点,并且保持共线四点的交比不变,称此变换为平面上的射影变换。
因为正交变换、相似变换、仿射变换都保持共线三点的单比不变,必然保持共线四点的交比不变,所以这些变换都是射影变换。
射影变换的基本不变性质:定理:平面上全部射影变换的集合构成群证明:(1)设是平面上的两个射影变换,是共线四点据定义有且且所以仍是射影变换(2)设是平面的上射影变换且且所以是射影变换故平面上全部射影变换的集合构成群称之为射影变换群,仿射变换群、相似变换群、正交变换群都是它的子群。
§2.6 几个重要的变换群下面讨论正交变换(运动)、相似变换、仿射变换、射影变换,以及它们的基本性质。
这些变换群可以决定四种不同的几何学,即欧氏几何学、相似几何学、仿射几何学和射影几何学。
一、正交变换群定义:平面上保持两点间距离不变的点变换称为正交变换或运动。
即将平面上的点建立一一对应,且对于平面上任意两点,若其对应点分别为,则对应线段的长度。
正交变换具有的基本不变的性质(1)正交变换把直线变成直线,并且保持点和直线的结合关系和共线三点的介于关系。
证明:设是直线上有序的三点,它们共线的充要条件为如果正交变换把它们依次变为,则有于是因此在同一直线上。
就是说,共线点变成共线点,直线变成直线。
(2)正交变换把不共线的点变成不共线的点证明:设为不共线三点,则三点不共线充要条件为如果它们依次变为,则有于是因此不共线由(1)、(2)知,正交变换把相交直线变成相交直线,把角变成角。

仿射变换和等距变换我们来了解一下仿射变换。
仿射变换是指保持直线和平行关系的变换。
它是一种非常常见且重要的变换,广泛应用于计算机图形学、计算机视觉、机器学习等领域。
在计算机图形学中,仿射变换可以用来实现图像的平移、旋转、缩放和剪切等操作。
通过对图像进行仿射变换,我们可以改变图像的形状、大小和方向,从而实现各种视觉效果。
比如,在图像处理中,我们可以利用仿射变换将一个图像投射到另一个图像上,实现图像的融合和叠加效果。
在计算机视觉中,仿射变换被广泛应用于图像配准和特征匹配等任务中。
图像配准是指将不同视角或不同时间拍摄的图像对齐,使得它们在几何上或拓扑上相似。
通过对图像进行仿射变换,我们可以将它们对齐到同一个坐标系下,从而方便后续的图像处理和分析。
特征匹配是指在图像中找到相似的特征点,并建立它们之间的对应关系。
通过对特征点进行仿射变换,我们可以将它们映射到另一幅图像上,并进行进一步的特征匹配和目标识别。
接下来,我们来了解一下等距变换。
等距变换是指保持距离不变的变换。
它是一种特殊的仿射变换,能够保持图形的形状、大小和角度等几何特性不变。
在几何学中,等距变换被广泛应用于保持图形的对称性和相似性等任务中。
比如,在建筑设计中,我们可以利用等距变换来保持建筑物的形状和结构不变,同时改变其大小和位置,从而实现建筑物的放缩和平移等操作。
在地图制作中,等距变换可以用来将地球表面的三维地理信息映射到平面上,保持地理位置的几何关系不变。
在计算机图形学和计算机视觉中,等距变换也被广泛应用。
在图像处理中,等距变换可以用来实现图像的旋转、镜像和投影等操作,从而改变图像的视角和视点。
在计算机视觉中,等距变换可以用来进行姿态估计和相机标定等任务,从而实现对图像和三维场景的几何变换和重建。
总结起来,仿射变换和等距变换在几何学中扮演着重要的角色。
它们不仅可以用来实现图像的变换和处理,还可以用来进行图像配准和特征匹配等任务。
通过对图像进行仿射变换和等距变换,我们可以改变图像的形状、大小和方向,实现各种视觉效果,同时保持其几何特性不变。
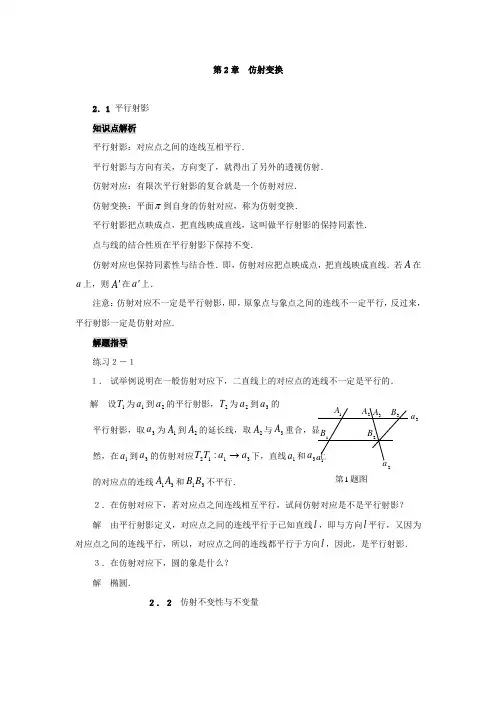
第2章 仿射变换2.1 平行射影 知识点解析平行射影:对应点之间的连线互相平行.平行射影与方向有关,方向变了,就得出了另外的透视仿射. 仿射对应:有限次平行射影的复合就是一个仿射对应. 仿射变换:平面π到自身的仿射对应,称为仿射变换.平行射影把点映成点,把直线映成直线,这叫做平行射影的保持同素性. 点与线的结合性质在平行射影下保持不变.仿射对应也保持同素性与结合性.即,仿射对应把点映成点,把直线映成直线.若A 在a 上,则A '在a '上.注意:仿射对应不一定是平行射影,即,原象点与象点之间的连线不一定平行,反过来,平行射影一定是仿射对应.解题指导 练习2-11. 试举例说明在一般仿射对应下,二直线上的对应点的连线不一定是平行的. 解 设1T 为1a 到2a 的平行射影,2T 为2a 到3a 的平行射影,取3a 为1A 到2A 的延长线,取2A 与3A 重合,显 然,在1a 到3a 的仿射对应3112:a a T T →下,直线1a 和3a 上 的对应点的连线31A A 和31B B 不平行.2.在仿射对应下,若对应点之间连线相互平行,试问仿射对应是不是平行射影? 解 由平行射影定义,对应点之间的连线平行于已知直线l ,即与方向l 平行,又因为对应点之间的连线平行,所以,对应点之间的连线都平行于方向l ,因此,是平行射影.3.在仿射对应下,圆的象是什么? 解 椭圆.2.2 仿射不变性与不变量1A 2A 3A 1a 2a 3a 1B2B 3B 题图第1经过平行射影不改变的性质和数,叫做仿射不变性质和仿射不变量. 经过仿射对应,它们也是不变的. 同素性和结合性都是仿射不变性质. 仿射对应把共点的线变成共点的线. 仿射对应把共线的点变成共线的点.定理2.1 二直线间的平行性是仿射不变性质.即,两条平行直线经过仿射对应后仍然是平行直线.推论2.2 平行四边形在仿射对应下还是平行四边形.即,平行四边形经过仿射对应后仍然是平行四边形.定义2.1 简比(单比).BCACABC =)( 有向线段的数量之比. (1) 当C 在A ,B 之间时,0)(<ABC ; (2) 当C 在A ,B 之外时,0)(>ABC ; (3) 当A C =时,0)(=ABC ; (4) 当B C =时,∞=)(ABC .定理2.3 共线三点的简比是仿射不变量.即,共线三点的简比在仿射对应下不变.定理2.4 两条平行线段的比是仿射不变量.即,两条平行线段的比在仿射对应下不变.定理2.5 直线上两条线段的比是仿射不变量.即直线上两条线段的比在仿射对应下不变.注意:一般地,任意两条线段的比,不是仿射不变量.即,如果两条线段不平行,则它们的比在仿射对应下会改变.定理2.7 在仿射对应下,任何一对对应三角形面积之比等于常数.即,任意两个三角形面积之比是仿射不变量.推论2.8 任意两个多边形面积之比是仿射不变量.因此,任意两个图形面积之比是仿射不变量.A B C图定义1.2补充题 证明定理2.5 直线上两条线段的比是仿射不变量.证明 如图,DC D A CD AD ''''=, 其中 CD CD BC AB CD AD ++=11+''''+=++=D C C B CD AB CD BC CD AB 1+''''+''''=''''+''+''=''''D C C B D C B A D C D C C B B A D C D A所以D C B A CD AB ''''=. 练习2-21.证明:三角形的重心具有仿射不变性.解 因为共线三点的简比具有仿射不变性,所以,仿射对应把三角形中点变成中点;同素性和结合性都是仿射不变性质,仿射对应把共点的线变成共点的线,仿射对应把共线的点变成共线的点,所以,仿射对应把三角形的重心变成三角形重心.2.证明:平行四边形的重心具有仿射不变性. 解 同第1题.3.证明:梯形在仿射对应下仍为梯形.解 因为二直线的平行性是仿射不变性,所以,仿射对应把梯形的上下底变成梯形的上下底,因此,梯形在仿射变换下仍然变成梯形.4.证明:任意两个多边形面积之比是仿射不变量.解 将多边形划分成n 个三角形1S ,Λ,2S ,n S ,对应的划分得到对应的三角形1S ',Λ,2S ',n S ',由定理2.7,在仿射对应下,任何一对对应三角形面积之比等于常数.即,任意两个三角形面积之比是仿射不变量,所以有k S S S S S S nn ='=='='Λ2211,于是)(212121n n n S S S k S k S k S k S S S '++'+'='++'+'=+++ΛΛΛ 即k S S S S S S n n='++'+'+++ΛΛ2121A B C DA 'B 'C 'D '补充题图所以,任意两个多边形面积之比是仿射不变量.5.已知平面上的一条定直线l ,P 为平面上的任意一点,P 点的对应点P '是点P 关于直线l 的对称点,这种变换称为反射变换,定直线叫做它的轴.试证明:反射变换是仿射变换.解 因为平面上关于反射轴的对称点是唯一确定的,反射变换是平面到自身内的一一对应,所以,由仿射变换的定义,反射变换是仿射变换.2.3 仿射变换的代数表达式知识点解析定理2.9 在仿射坐标系下,设共线三点A ,B ,C 的坐标为),(11y x ,),(22y x ,),(33y x ,则三点的交比为23132313)(y y y y x x x x BC AC ABC --=--==定理2.10 不共线的三对对应点决定唯一一个仿射变换.(见习题2-3第4题). 解题指导 练习2-31.在仿射坐标系下,证明直线的方程是一次方程. 证明 [关键] 利用仿射变换的式 ⎩⎨⎧++='++='ya x ab y ya x a a x 22211211[技巧]设直线方程b x k y '+'=',将仿射变换代入. 这时,得b y a x a a k y a x a b '+++=++)(12112221 整理得122212222111ka a b b ka x ka a a ka y -'+-+--=可见,仍为直线方程,即一次方程.2.求使三点)0,0(,)1,1(,)1,1(-的对应点分别为)3,2(,)5,2(,)7,3(-的仿射变换式.解 [关键] 将每对对应点分别代入仿射变换公式⎩⎨⎧++='++='y a x a b y ya x a a x 22211211 [注意] 仿射变换把点),(y x 变成),(y x ''时,有⎩⎨⎧++='++='ya x ab y ya x a a x 22211211 将每对对应点分别代入仿射变换公式⎩⎨⎧++='++='y a x a b y ya x a a x 22211211 得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧-+=--+=++=++===2221121122211211735232a a b a a a a a b a a a b a解得⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧=-=-====6214213222122111a a a a b a代入仿射变换式,得所求的仿射变换式⎪⎩⎪⎨⎧+-='-+='yx y yx x 643212123.利用仿射变换的表达式证明:直线上三点的简比是仿射不变量. 证明 [关键] 利用仿射变换的式⎩⎨⎧++='++='ya x ab y ya x a a x 22211211设三点),(11y x A ,),(22y x B ,),(33y x C 在仿射变换下分别变成),(11y x A ''',),(22y x B ''',),(33y x C ''',代入仿射变换式 ⎩⎨⎧++='++='ya x ab y ya x a a x 22211211 得322321322222121221211312311321221121121111y a x a b y y a x a b y y a x a b y y a x a a x y a x a a x y a x a a x ++='++='++='++='++='++='于是)()()()(23122311131213112313y y a x x a y y a x x a x x x x -+--+-='-''-' (*) 由定理2.9,k x x x x y y y y =--=--23132313即,)(2313y y k y y -=-,)(2313x x k x x -=-,代入(*)式得k y y a x x a y y k a x x k a x x x x =-+--+-='-''-')()()()(23122311231223112313同理k y y a x x a y y k a x x k a y y y y =-+--+-='-''-')()()()(23222321232223212313所以23132313x x x x y y y y '-''-'='-''-'即,直线上三点的简比是仿射不变量.4.利用解析方法证明:不共线的三对对应点决定一个仿射变换.证明 [关键] 利用仿射变换的式⎩⎨⎧++='++='ya x ab y ya x a a x 22211211设不共线的三点),(11y x A ,),(22y x B ,),(33y x C 在仿射变换下分别变成),(11y x A ''',),(22y x B ''',),(33y x C ''',代入仿射变换式 ⎩⎨⎧++='++='ya x ab y y a x a a x 22211211 得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧++='++='++='++='++='++='322321331231132222212212211212212111121111y a x a b y y a x a a x y a x a b y y a x a a x ya x ab y y a x a a x 注意:三对对应点的坐标为已知数,a ,b ,11a ,12a ,21a ,22a 为未知数,写成矩阵形式为⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡''''''2221121133332222111133221110000011000000110000001a a b a a a y x y x y x y x y x y x y x y x y x 记作AX b =计算得212131312)])(())([(y y x x y y x x A ------= 这里0≠A ,因为如果0=A ,则0))(())((12131312=-----y y x x y y x x即12131213x x x x y y y y --=--这时),(11y x A ,),(22y x B ,),(33y x C 三点共线,与已知这三点不共线矛盾. 所以0≠A .于是,方程组AX b =有唯一解.即,不共线三对对应点决定一个仿射变换.5.利用仿射变换导出椭圆12222=+by a x 的面积公式. 解 仿射变换把圆变成椭圆. 如图.由推论2.8,任意两个 图形面积的比是仿射不变量,有C B A ABCS S S S '''∆∆=椭圆圆b a rr S r ⋅⋅⋅⋅=2212212椭圆π于是ab S π=椭圆.2.4 仿射变换的特例知识点解析 1. 平移变换把点),(y x P 平移到点),(y x Q '',坐标关系式为⎩⎨⎧+='+='b y y ax x 平移变换保持线段的长度不变. 2.旋转变换以原点)0,0(O 为旋转中心,旋转角为θ,点),(y x P 旋转后变成),(y x P ''',坐标关系题图第5式为⎩⎨⎧+='-='θθθθcos sin sin cos y x y y x x其中⎥⎦⎤⎢⎣⎡-=θθθθcos sin sin cos A满足I A A A A ='=',即,A 为正交矩阵. 3. 反射变换在平面上取一定直线l ,使平面上的点P 对应到它关于直线l 的对称点P ',这样的变换叫做反射变换.直线l 上的点都是自对称点,称为反射变换的不动点. 直线l 称为反射对称轴. 坐标关系式为⎩⎨⎧-='='yy xx4.位似变换在平面上取一定点O 和一个非0常数k ,使O 对应自己,其它的点P 对应P ',三点O ,P ,P '在一条直线上,简比为k P OP =')(,⎩⎨⎧='='kyy kxx位似变换把直线变成与之平行的直线,把图形变成相似形. 解题指导 练习2-41.求把点)3,0(变为点)4,2(-的平移变换,并将平移变换作用于曲线06432=--+y x x .解 [关键] 将)3,0(P 和)4,2(-'P 代入平移变换公式⎩⎨⎧+='+='by y ax x .得⎩⎨⎧+=+=-ba3402解得⎩⎨⎧=-=12b a于是,所求的平移变换为⎩⎨⎧+='-='12y y x x将平移变换作用于曲线06432=--+y x x ,就是将变换⎩⎨⎧+='-='12y y x x 的x ,y 解出来代入06432=--+y x x ,代入得08472=+'-'+'y x x2.求把点)3,2(-变为点)3,2(-的旋转变换,并将旋转变换作用于曲线06432=--+y x x .解 把)3,2(-P 和)3,2(-'P 代入旋转变换公式⎩⎨⎧+='-='θθθθcos sin sin cos y x y y x x得⎩⎨⎧+-=---=θθθθcos 3sin 23sin 3cos 22解得0sin =θ, 1cos -=θ 再代入旋转变换公式得⎩⎨⎧-='-='y y xx将这个变换作用于曲线06432=--+y x x ,就是将变换⎩⎨⎧-='-='yy xx 的x ,y 解出来代入06432=--+y x x ,代入得06432=-'+'-'y x x3.求中心在原点,半轴分别为1和2并以直线025=-y x 为对称轴的椭圆方程. 解 1=a ,2=b ,中心在原点的椭圆方程为1422=+y x对称轴为025=-y x ,即x y 52=,这时,25tan ==θk于是292tan 11cos 2=+=θθ,295cos 1sin 2=-=θθ,所以,旋转方程为⎪⎪⎩⎪⎪⎨⎧+='-='292295295292y x y y x x于是⎪⎪⎩⎪⎪⎨⎧'+'='+'=292295295292y x y y x x 代入1422=+y x ,得0116601044122=-''+'+'y x y x .4.证明:位似变换把直线变成直线.证明 [关键]设直线b ax y +=,从位似变换⎩⎨⎧='='ky y kx x 中解出x ,y 代入直线b ax y +=内.代入得kb x a y +'='显然仍为一条直线.5.证明:位似变换把直线变成与自己平行的直线.证明 由第4题结果可知,位似变换把直线b ax y +=变成直线kb x a y +'=',因为斜率都为a ,所以二者平行.。
仿射变换是一种线性变换和平移组合的几何转换,它可以将原始平面上的点映射到目标平面上。
以二维平面为例,假设有一个原始点P (x, y),经过仿射变换后得到点P' (x', y')。
则仿射变换可以表示为以下公式:
```
x' = a * x + b * y + c
y' = d * x + e * y + f
```
其中,a、b、c、d、e、f 是仿射变换的参数,决定了变换的具体方式。
这个公式可以用矩阵的形式表示:
```
[x'] [a b c] [x]
[y'] = [d e f] * [y]
[1 ] [0 0 1] [1]
```
其中,矩阵`[a b c; d e f; 0 0 1]` 是仿射变换矩阵。
具体地,仿射变换可通过以下几种基本操作实现:
1. 平移:通过参数c 和f 来实现沿x 轴和y 轴的平移。
2. 缩放:通过参数a 和e 控制沿x 轴和y 轴的缩放因子,可以实现放大或缩小。
3. 旋转:通过a、b、d 和e 中的正负值控制,可以实现沿原点顺时针或逆时针旋转。
4. 错切:通过参数b 和d 来实现x 方向和y 方向的错切。
仿射变换保持了直线的平行性和比例性,但并不保持角度的大小。
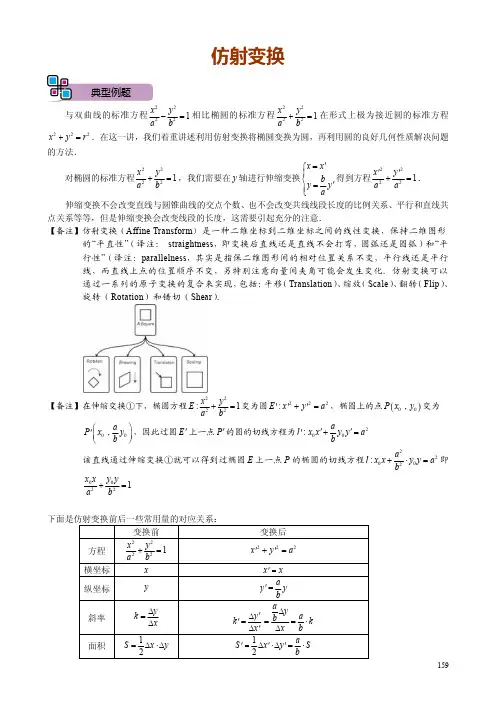
159仿射变换与双曲线的标准方程22221x y a b 相比椭圆的标准方程22221x y a b 在形式上极为接近圆的标准方程222x y r .在这一讲,我们着重讲述利用仿射变换将椭圆变换为圆,再利用圆的良好几何性质解决问题的方法.对椭圆的标准方程22221x y a b ,我们需要在y 轴进行伸缩变换x x b y y a得到方程22221x y a a .伸缩变换不会改变直线与圆锥曲线的交点个数、也不会改变共线线段长度的比例关系、平行和直线共点关系等等,但是伸缩变换会改变线段的长度,这需要引起充分的注意.【备注】仿射变换(Affine Transform )是一种二维坐标到二维坐标之间的线性变换,保持二维图形的“平直性”(译注: straightness ,即变换后直线还是直线不会打弯,圆弧还是圆弧)和“平行性”(译注:parallelness ,其实是指保二维图形间的相对位置关系不变,平行线还是平行线,而直线上点的位置顺序不变,另特别注意向量间夹角可能会发生变化.仿射变换可以通过一系列的原子变换的复合来实现,包括:平移(Translation )、缩放(Scale )、翻转(Flip )、旋转(Rotation )和错切(Shear ).【备注】在伸缩变换①下,椭圆方程2222:1x y E a b变为圆222:E x y a ,椭圆上的点 00,P x y 变为00,a P x y b,因此过圆E 上一点P 的圆的切线方程为:l 200a x x y y a b该直线通过伸缩变换①就可以得到过椭圆E 上一点P 的椭圆的切线方程22002:a l x x y y a b即00221x x y ya b典型例题160例1(2010年上海)已知椭圆22x y ⑴ 设直线l【解析】 ⑴ 作仿射变换,椭圆方程变为222x y a ,则121k k∴C D O E ,根据垂径定理,E 是弦C D 的中点于是E 是CD 的中点.⑵ 如下图,求作点1P 、2P 的步骤为:1.以O 为圆心,椭圆的长轴长a 为半径作圆;2.过O 作射线,使Ox 轴正方向到该射线的角为 ,射线与圆交于Q ;3.过圆与y 轴正向的交点作y 轴的垂线,过圆与x 轴负向的交点作x 轴的垂线,两条垂线交于点P ;4.连结P Q ,取其中点N ;认识仿射变换1615.连结ON ,过N 作与ON 垂直的直线,交圆于点1P 、2P ; 6.过点1P 、2P 作x 轴的垂线,交椭圆于点1P、2P 即为所求. 证明:这样作图相当于作了纵轴方向上的伸缩变换22b y y a,容易证明线段P Q 与12P P互相平分,而坐标轴方向上的伸缩变换不改变线段的比例,因此PQ 与12PP 互相平分.这样就有12121222PQ PN PP PP PP PP【备注】题⑴说明弦中点问题中由点差法得到的结论可以看做是椭圆的“垂径定理”;题⑵利用仿射变换完成纯几何...作图,注意椭圆的参数方程在仿射变换图形下获得了确切的几何意义.练习1(2012年湖北理)设A 是单位圆221x y 上的任意一点,l 是过点A 与x 轴垂直的直线,D 是直线l 与x 轴的交点,点M 在直线l 上,且满足DM m DA (0m ,且1m ).当点A 在圆上运动时,记点M 的轨迹为曲线C .求曲线C 的方程,判断曲线C 为何种圆锥曲线,并求焦点坐标.【解析】 曲线C 的方程为2221yx m. 当01m 时,曲线C 为焦点在x轴上的椭圆,焦点坐标为,0; 当1m 时,曲线C 为焦点在y轴上的椭圆,焦点坐标为 0,.通过仿射变换可以将椭圆内接三角形变为圆内接三角形,它们之间存在固定的比例关系.而求解圆内接三角形的面积运算量要低很多.例2 (2012年人大附开学考试)已知直线【解析】作仿射变换x x y,则直线l 是椭圆22334y x即2213944x y 的切线. 设O 到直线l 的距离为d ,23944d ≤(∵直线l 的斜率存在)12AOB A O B S d△△利用仿射变换处理面积问题162 等号当且仅当232d时取得. 因此AOB △.练习2(2010年朝阳一模文)已知椭圆22162x y 中有一内接三角形ABC ,其顶点C 的坐标1,AB.当ABC △的面积最大时,求直线AB 的方程.A'O【解析】 将椭圆通过仿射变换x x y y变成圆226xy ,则 A B C ABC S△△,1A B k,C 坐标为,.∵直线OC ∥直线A B ,∴A B C OA B S S △△ 设直线A B 的方程为0x y m ,则 O 到直线AB ,A B12OA B S△3≤∴当232m ,即m OA B S △取得最大值3,此时直线A B 的方程为0xy .因此OAB S△AB 的方程为0x .练习3 (2011年顺义二模)已知椭圆2214x y 的左、右顶点分别记为A 、B .过A 斜率为1的直线交椭圆于另一点S ,在椭圆C 上的T 满足:TSA △的面积为15.试确定点T 的个数.【解析】 将椭圆通过仿射变换12x x y y变成圆224x y ,则225S AT SAT S S △△.AS : 22y x ,即240x y∴圆心到直线ASAS163∴T 到直线AS的距离为25142,∴在优弧上存在两个T 点2 T 点.综上,点T 的个数也即点T 的个数是2.练习4 (2010年宣武一模文)直线:220l x y 与椭圆2214y x 的交点为A 、B .求使PAB 的面积为12的点P 的个数;【解析】 2.练习5(2011年西城二模)设直线l 与椭圆2219x y 交于A 、B 两点,且以AB 为直径的圆过椭圆的右顶点C ,求ABC △面积的最大值.【解析】 如图,将坐标系原点平移至C ,则椭圆方程变为22319x y 即22690x x y .设直线AB 的方程为x my a ,则联立直线方程与椭圆方程有22690x my x x y a ,即266910y m yx a x a而12121y y x x ,∴6910a ,35a ,因此35CD . 将椭圆通过变换3x x y y变为圆229x y ,则13ABC A B C S S △△ O (O')B'A'D (D')C (C')164 ∵35C D ,3O C ,∴3153435A B C O A B S C D S O D△△设O 到A B 的距离为d,1122O A B S A B d d △∴当且仅当29d 时,O A B S △取得最大值92于是13128ABC O A B S S △△≤,即ABC △面积的最大值为38.例3(2011年辽宁)如图,已知椭圆的短轴为MN ,且1C 、C 这四点按纵坐标从大到小依次为【解析】 ⑴ 设2MN a ,则椭圆1C :22211e x y a a ;椭圆2C :22211e x y a a ; 231e 4BC AD. ⑵ 对椭圆1C 作仿射变换x x y ,则1C :222x y a ;对椭圆2C 作仿射变换x x ,1y y ,则2C :222x y a .BO AN EO EN BO AN k k∥211e EO EN k k设点 cos ,sin E a a (0π ),则sin cos EO k,sin cos 1EN k利用仿射变换处理弦长问题165∴设cos 1cos EO EN k y k,则cos 1cos y , 1cos 1,11y 因此 ,02,y BO AN ∥2121e,∴当0<e时,不存在;当e 时,存在.利用仿射变换可以将一些题目中“平凡”的条件转化为对解题很有利的“特殊”条件,比如:① 利用仿射变换可以改变斜率,从而可以使得某些与椭圆相关的平行四边形转化为矩形,从而简化问题;② 利用仿射变化可以将椭圆变为圆,从而可以使某些与椭圆相关的平行四边形转化为菱形,从而简化问题. 例422x y【解析】 作仿射变换,椭圆方程变为224x y ,且OM ON .(理科)四边形OM P N 为正方形,于是OP M N∴P 点的轨迹方程为圆228x y , 因此P 点的轨迹方程为228x,即22184x y .∴存在符合题意的点1F 、2F ,坐标为 2,0 .(即椭圆的两个焦点) (文科)四边形OM P N 为矩形,OP M N ∴P 点的轨迹方程为圆2220x y ,因此P 点的轨迹方程为2220x,即2212010x y .∴存在符合题意的点F ,坐标为,0.(即椭圆的右焦点). 练习1(2011年海淀一模)设直线:l y kx m (12k ≤)与椭圆22143x y 相交于A 、B 两点,以线利用仿射变换凸显隐藏几何条件166 段OA ,OB 为邻边作平行四边形OAPB ,其中顶点P 在椭圆C 上,O 为坐标原点.求OP 的取值范围.【解析】 用仿射变换椭圆转化为圆,于是平行四边形OAPB 变为菱形OA P B ,由12AB k ≤得A B k ≤.根据菱形的对角线互相垂直,于是OP k ≥,因此1P x ≤.也就是说,1P P x x ≤ 于是22222231344P P P P Px x OP x y x133,4因此OP的取值范围是,.练习2(2012年海淀一模理)已知直线1l :1y kx m 与椭圆G :2212x y 交于A 、B 两点,直线2l :2y kx m (12m m )与椭圆G 交于C 、D 两点,且AB CD ,如图所示.⑴ 证明:120m m ;⑵ 求四边形ABCD 的面积S 的最大值.【解析】 考虑用仿射变换.⑴ ABCD 为椭圆内接平行四边形,作仿射变换后变为圆内接平行四边形,为矩形.因此对角线为直径,也就是说椭圆内接平行四边形的对角线互相平分于原点,于是120m m ;⑵ 圆内接矩形当且仅当矩形为正方形时面积最大,最大值为4,于是椭圆内接平行四边形面积.【备注】也可以看作相关直线问题⑴ 设直线y kx m 与椭圆交于两点A 、B ,则联立直线与方程,有22212102k x kmx m∴22AB k22k167∴AB CD 等价于2212m m ,又12m m ,∴12m m ,即120m m⑵ 由①,AB 与CD 关于原点对称,四边形ABCD 为对称中心在原点的平行四边形.不妨设10m ,则4ABCD OABS S△21422k22211221412m k m k≤(当且仅当22112m k时取得等号). ∴四边形ABCD 的面积S 的最大值是例5Q【解析】 如图,将椭圆22182x y通过仿射变换2x x y y变成圆228x y ,则 2,2M 过M 作x 轴的垂线,垂足为H ,交圆228x y 于点N ,则易知 2,2N . ∵ 2,2N ,∴OM ON ,又OM A B ∥,∴ON A B 根据垂径定理,N 平分弧A B ,于是M N是A M B 的平分线.于是22MP M P M Q MQ k k k k ,又MH PQ ,∴MPQ △是等腰三角形,证毕.【备注】(2012年密云一模理)如图所示,已知椭圆的中心在原点,焦点在x 轴上,长轴长是短轴长的3倍,且经过点 3,1M .平行于OM 的直线l 在y 轴上的截距为m (0m ),且交椭圆于A 、B 两不同点.⑴ 求椭圆的方程; ⑵ 求m 的取值范围;⑶ 求证:直线MA 、MB 与x 轴始终围成一个等腰三角形.【解析】 ⑴ 221182x y ;168 ⑵ 设直线l :13y x m (0m ),则 2,00,2m ;⑶ 视为连线垂直问题的推广或用仿射变换均可解决.练习6(2011年四中高二期中考试)已知点 2,1M 是椭圆22182x y 上一点,直线102y x m m 与椭圆相交于A 、B 两点.求MAB 的内心的横坐标.【解析】 考虑到图形的特点与求解的问题,考虑使用仿射变换将椭圆转化为圆加以解决.在圆中,容易证明M Q 是B MA 的平分线;于是MQ 是BMA 的平分线.因此MAB 的内心的横坐标为M 的横坐标,也就是2.例6(201122x y【解析】 ⑴ 如图,作仿射变换x xC 变为圆C :223x y .∴32OP Q OPQ S S△△ 设O 到直线P Q 的距离为d ,则1322d ,解得d 于是P Q ,OP OQ ,因此2212x y ,2221x y 而222211223x y x y ,∴22221212x x x x 3,2222121223y y y y 2 .综合169⑵ 设PQ 的斜率为k ,则OM 的斜率为23k,OM PQ OM P Q333 设2249k m k ,则43m ≥.3OM PQ 52≤. ⑶∵ODE ODG OEG S S S△△△32OD E OD G OE G S S S △△△ ∴在圆C 中,D E 、D G 、E G 所对的圆心角均为90 因此,不存在满足题意的三角形.练习7 (2013北京昌平二模理)如图,已知椭圆22221x y a b(0a b )的长轴为AB ,过点B 的直线l 与x 轴垂直,椭圆的离心率e,F 为椭圆的左焦点,且1AF BF . ⑴ 求此椭圆的方程;⑵ 设P 是此椭圆上异于A B ,的任意一点,PH x 轴,H 为垂足,延长HP 到点Q 使得HP PQ . 连接AQ 并延长交直线l 于点,M N 为MB 的中点,判定直线QN 与以AB 为直径的圆O 的位置关系.【备注】设AQ 与椭圆交于点R ,则NR 与椭圆相切,此题与⑵均可以利用仿射变换解决.例7已知椭圆22143x y 上的两点A 、点.设直线PB 与椭圆相交于D ,证明:直线利用仿射变换将问题转化为几何问题170【解析】若点A 、B 为关于圆的直径HG 对称的两点,HG 所在直线上的一点P 与B 点的连线交圆于D ,则AD 与PH 交于定点E .证明如下:如图,连结AG 、GD ,设PA 与圆交于C .HG PDBECA∵G 为弧CD 和弧AB 的中点,∴AG 、DH 分别是A 和BDG 的平分线 而DG DH ,∴DG 是EDP 的平分线.于是AE DE EGAP DP GP,因此2AE DE EG AP DP GP , 而AE DE EG EH (相交弦定理),AP DP AP CP PG PH (切割线定理) 于是EG EH EG EG PG PH PG PG ,即EG PGEH PH .∵PG PH 为定值(在本例中为13),∴EGEH 为定值,E 为定点(在本例中 1,0E ).练习8 设直线l :y kx m 与椭圆2212x y 相交于M 、N 两点,F 是椭圆的右焦点,直线FM 与直线FN 的斜率互为相反数.求证:直线l 过定点,并求该定点的坐标.【解析】 直线l 过定点 2,0.本质与例题相同.练习9(2010年江苏)如图,在平面直角坐标系xOy 中,已知椭圆22195x y 的左、右顶点为A 、B ,右焦点为F .设过点 9,T m 的直线,TA TB 与此椭圆分别交于点 11,M x y 、 22,N x y ,其中0m ,10y ,20y .设9t ,求证:直线MN 必过x 轴的一定点(其坐标与m 无关).171【解析】 如下左图所示,利用坐标变换x xa y y b可以把椭圆22221x y a b 变换圆222x y a ,由于伸缩变换不改变共线以及线段长度的比,于是问题就转化为如下右图所示的:已知以AB 为直径圆O ,T 为与AB 垂直的圆外直线上任意一点,连结AT 、BT 与圆O 分别交于M 、N .求证MN 恒过定点D .x法1连结AN 、MB 并延长交于点T ,容易知道T 与T 在同一条垂直于AB 的直线上(B 为ATT △的垂心)CT'T对ABT △的割线MN ,根据梅涅劳斯定理有1AD BM T NDB MT NA ; 而AM 、NB 、T T 交于一点,根据赛瓦定理有1BM T N ACMT NA CB; 于是1AD CB DB AC ,即AD ACDB BC 为定值,因此D 为定点. 法2172 CT NM A BOD设4AC a ,TAC ,NAC ,则4cos aAT,2cos AM a ,2cos a BT ,2cos BN a ,AN AD ADN MDB AD AD DM AN AM MB MD AM DM DB MD DB MB BNADM NDB BN DB△∽△△∽△ 而AN AT ANT BMT BM BT △∽△,于是22824AD AT AM a DB BT BN a .法3PCD O BA M NT设2MOC ,2NOC ,则OC 到OP 的角为 ,以O 为极点,OC 为极径,那么直线MN 的方程为 cos ,d O MN , 即 cos cos AB 于是ODcos cos AB cos cos sin sin cos cos sin sin AB1tan tan 1tan tan AB而12TAC MAB MOB ,12NAB NOB ,∴tan TC AC ,tan tan BCBTC TC因此11BC AC OD AB BC AC,于是点D 为定点.。
3.2 仿射变换3.2.1 齐次坐标下一节我们就会知道仿射变换是一个组合了平移的线性变换。
但是,因为向量只表示方向和长度,与位置无关,所以平移一个向量是无意义的,换句话说,平移后的向量是不变的。
平移只能作用在点上(即,位置向量)。
齐次坐标提供了一个便捷的表示方法用来统一处理点和向量。
在齐次坐标中,我们使用4个元素,我们通过它的第4个坐标分量w 来决定所描述的是一个点还是一个向量。
确切地说,我们写为:1.(x ,y ,z ,0)用于向量 2.(x ,y,z ,1)用于点我们将会看到,把w 设为1是为了让点的平移操作得到正确执行,把w 设为0是为了防止向量在变换过程中发生平移。
(我们不希望平移向量的坐标,因为向量可以改变的只有方向和大小——平移对向量来说没有意义。
)注意:齐次坐标的记法与图1.17所示的概念一致。
也就是,两点相减q −p = (q x ,q y ,q z ,1) − (p x ,p y ,p z ,1) = (q x – p x ,q y – p y ,q z – p z , 0)的结果是一个向量,而一个点与一个向量相加p +v =( p x ,p y ,p z ,1) + (v x ,v y ,v z ,0) = (p x + v x ,p y + v y ,p z + v z , 1)的结果是个点。
3.2.2 定义和矩阵表示一个线性变换无法表示所有我们需要的变换;所以,我们需要添加一组叫做仿射变换的函数。
仿射变换是一个线性变换加上一个平移向量b ;也就是:()()b ατ=+u u或者用矩阵表示为:111213212223313233()[,,][,,][,,]x y z A A A x y z A A A b b b x y z A A A α⎡⎤⎢⎥'''=+=+=⎢⎥⎢⎥⎣⎦u uA b式中的A 是线性变换的矩阵表示。
如果使用w =1的齐次坐标,则可表示为:[][]11121321222331323300,,,1,,,101xyzA A A A A A x y z x y z A A A b b b ⎡⎤⎢⎥⎢⎥'''=⎢⎥⎢⎥⎢⎥⎣⎦(公式3.6) 公式3.6中的4×4矩阵称为仿射矩阵的矩阵表示。
空间直⾓坐标转换之仿射变换(转)空间直⾓坐标转换之仿射变换□/3Echo⼀、引⾔⼯作开发中常常会遇到坐标系转换的问题,关于如何实现不同坐标系之间的转换的论述⾮常之多,基于实际应⽤项⽬,⼤都提出了⼀种较好的解决⽅法。
两年前,我也从⽹上下载了⼀篇⽂章——《坐标系转换公式》(青岛海洋地质研究所戴勤奋译),⽂中对各种变换模型都有详细的描述,如莫洛⾦斯基-巴德卡斯转换模型、赫尔黙特转换模型、布尔莎模型以及多项式转换,算是⼀篇⽐较全⾯介绍坐标系转换⽅⾯的⽂章。
我想⼤家对常⽤转换模型的理解⽅⾯⼀般不会有⼤太困难,如果基于当前流⾏GIS平台(如超图、ArcGIS、MapInfo)的基础上作⼆次开发,我想也不会有什么困难,只要找准了它们提供的接⼝,理顺⼀下思路,我们也能实现⽤户提出的需求。
但是对于内核算法、参数求解的过程我们却⼀⽆所知,很多时候我们⾃⼰觉得解决了这个问题,也就不会太去关注底层实现的算法问题了。
不过,说实话要去真正弄清楚各个模型之间的关系确实是⼀件头痛的事情,没有⼀定的数学功底还真的是不知道它在说些什么。
⼆、仿射变换仿射变换是空间直⾓坐标变换的⼀种,它是⼀种⼆维坐标到⼆维坐标之间的线性变换,保持⼆维图形的“平直线”和“平⾏性”,其可以通过⼀系列的原⼦变换的复合来实现,包括平移(Translation)、缩放(Scale)、翻转(Flip)、旋转(Rotation)和剪切(Shear)。
此类变换可以⽤⼀个3×3的矩阵来表⽰,其最后⼀⾏为(0, 0, 1)。
该变换矩阵将原坐标(x, y)变换为新坐标(x', y'),这⾥原坐标和新坐标皆视为最末⼀⾏为(1)的三维列向量,原列向量左乘变换矩阵得到新的列向量:[x'] [m00 m01 m02] [x] [m00*x+m01*y+m02][y'] = [m10 m11 m12] [y] = [m10*x+m11*y+m12][1 ] [ 0 0 1 ] [1] [ 1 ]⽤代数式表⽰如下:x’ = m00*x+m01*y+m02;y’ = m10*x+m11*y+m12;如果将它写成按旋转、缩放、平移三个分量的复合形式,则其代数式如下:其⽰意图如下:⼏种典型的仿射变换:1.public static AffineTransform getTranslateInstance(double tx, double ty)平移变换,将每⼀点移动到(x+tx, y+ty),变换矩阵为:[ 1 0 tx ][ 0 1 ty ][ 0 0 1 ](译注:平移变换是⼀种“刚体变换”,rigid-body transformation,中学学过的物理,都知道啥叫“刚体”吧,就是不会产⽣形变的理想物体,平移当然不会改变⼆维图形的形状。
OpenCV——仿射变换什么是仿射变换?1. ⼀个任意的仿射变换都能表⽰为乘以⼀个矩阵 (线性变换) 接着再加上⼀个向量 (平移).2. 综上所述, 我们能够⽤仿射变换来表⽰:1. 旋转 (线性变换)2. 平移 (向量加)3. 缩放操作 (线性变换)你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的关系 .我们通常使⽤矩阵来表⽰仿射变换.考虑到我们要使⽤矩阵和对⼆维向量做变换, 所以也能表⽰为下列形式:如何求怎样才能求得⼀个仿射变换?实现代码:#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"#include <iostream>#include <stdio.h>using namespace cv;using namespace std;/// 全局变量char* source_window = "Source image";char* warp_window = "Warp";char* warp_rotate_window = "Warp + Rotate";/** @function main */int main(int argc, char** argv){Point2f srcTri[3];Point2f dstTri[3];Mat rot_mat(2, 3, CV_32FC1);Mat warp_mat(2, 3, CV_32FC1);Mat src, warp_dst, warp_rotate_dst;/// 加载源图像src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\03.jpg", 1); /// 设置⽬标图像的⼤⼩和类型与源图像⼀致warp_dst = Mat::zeros(src.rows, src.cols, src.type());/// 设置源图像和⽬标图像上的三组点以计算仿射变换srcTri[0] = Point2f(0, 0);srcTri[1] = Point2f(src.cols - 1, 0);srcTri[2] = Point2f(0, src.rows - 1);dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7);/// 求得仿射变换warp_mat = getAffineTransform(srcTri, dstTri);/// 对源图像应⽤上⾯求得的仿射变换warpAffine(src, warp_dst, warp_mat, warp_dst.size());/** 对图像扭曲后再旋转 *//// 计算绕图像中点顺时针旋转50度缩放因⼦为0.6的旋转矩阵Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);double angle = -50.0;double scale = 0.6;/// 通过上⾯的旋转细节信息求得旋转矩阵rot_mat = getRotationMatrix2D(center, angle, scale);/// 旋转已扭曲图像warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());/// 显⽰结果namedWindow(source_window, CV_WINDOW_AUTOSIZE);imshow(source_window, src);namedWindow(warp_window, CV_WINDOW_AUTOSIZE);imshow(warp_window, warp_dst);namedWindow(warp_rotate_window, CV_WINDOW_AUTOSIZE);imshow(warp_rotate_window, warp_rotate_dst);/// 等待⽤户按任意按键退出程序waitKey(0);return 0;} 结果如下:代码解析:仿射变换: 正如上⽂所说, 我们需要源图像和⽬标图像上分别⼀⼀映射的三个点来定义仿射变换: ///设置源图像和⽬标图像上的三组点以计算仿射变换srcTri[0] = Point2f(0, 0);srcTri[1] = Point2f(src.cols - 1, 0);srcTri[2] = Point2f(0, src.rows - 1);dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7);///求得仿射变换warp_mat = getAffineTransform(srcTri, dstTri);我们获得了⽤以描述仿射变换的矩阵 (在这⾥是 warp_mat)将刚刚求得的仿射变换应⽤到源图像warpAffine()函数有以下参数:src: 输⼊源图像warp_dst: 输出图像warp_mat: 仿射变换矩阵warp_dst.size(): 输出图像的尺⼨///对源图像应⽤上⾯求得的仿射变换warpAffine(src, warp_dst, warp_mat, warp_dst.size());旋转: 想要旋转⼀幅图像, 你需要两个参数:1. 旋转图像所要围绕的中⼼2. 旋转的⾓度. 在OpenCV中正⾓度是逆时针的3. 可选择:缩放因⼦我们通过下⾯的代码来定义这些参数:再利⽤OpenCV函数来获得旋转矩阵, 这个函数返回⼀个矩阵 (这⾥是rot_mat)最后把旋转应⽤到仿射变换的输出.///计算绕图像中点顺时针旋转50度缩放因⼦为0.6的旋转矩阵Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);double angle = -50.0;double scale = 0.6;///通过上⾯的旋转细节信息求得旋转矩阵rot_mat = getRotationMatrix2D(center, angle, scale);///旋转已扭曲图像warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());。
仿射变换及其变换矩阵的理解博客: | |⽬录写在前⾯2D图像常见的坐标变换如下图所⽰:这篇⽂章不包含透视变换(projective/perspective transformation),⽽将重点放在仿射变换(affine transformation),将介绍仿射变换所包含的各种变换,以及变换矩阵该如何理解记忆。
仿射变换:平移、旋转、放缩、剪切、反射仿射变换包括如下所有变换,以及这些变换任意次序次数的组合:平移(translation)和旋转(rotation)顾名思义,两者的组合称之为欧式变换(Euclidean transformation)或刚体变换(rigid transformation);放缩(scaling)可进⼀步分为uniform scaling和non-uniform scaling,前者每个坐标轴放缩系数相同(各向同性),后者不同;如果放缩系数为负,则会叠加上反射(reflection)——reflection可以看成是特殊的scaling;刚体变换+uniform scaling 称之为,相似变换(similarity transformation),即平移+旋转+各向同性的放缩;剪切变换(shear mapping)将所有点沿某⼀指定⽅向成⽐例地平移,语⾔描述不如上⾯图⽰直观。
各种变换间的关系如下⾯的venn图所⽰:通过变换矩阵可以更清晰地看出这些变换间的关系和区别。
变换矩阵形式没有平移或者平移量为0的所有仿射变换可以⽤如下变换矩阵描述:x ′y ′=a b cdx y不同变换对应的a ,b ,c ,d 约束不同,排除了平移变换的所有仿射变换为线性变换(linear transformation ),其涵盖的变换如上⾯的venn 图所⽰,其特点是原点位置不变,多次线性变换的结果仍是线性变换。
为了涵盖平移,引⼊齐次坐标,在原有2维坐标的基础上,增⼴1个维度,如下所⽰:x ′y ′1=ab c de f1x y1所以,仿射变换的变换矩阵统⼀⽤ ab cde f 01来描述,不同基础变换的a ,b ,c ,d ,e ,f 约束不同,如下所⽰:此外,旋转和平移相乘得到刚体变换的变换矩阵,如下,有3个⾃由度(θ,t x ,t y ),这⾥旋转⽅向为逆时针⽅向,因此与上图中的正负号不同,cos(θ)−sin(θ)t x sin(θ)cos(θ)t y 01x y1=x ′y ′1再乘上uniform scaling 得到相似变换,有4个⾃由度(s ,θ,t x ,t y ),如下:[][][][][][][][][][]s cos(θ)−s sin(θ)t x s sin(θ)s cos(θ)t y 01x y1=x ′y ′1⾃然,仿射变换的变换矩阵有6个⾃由度(a ,b ,c ,d ,e ,f )。
仿射变换公式
仿射变换公式是一种常用的几何变换,它可以将一个图形变换到另一个图形,而不改变其
形状。
仿射变换公式的一般形式为:
X' = aX + bY + c
Y' = dX + eY + f
其中,X和Y是原图形的坐标,X'和Y'是变换后的坐标,a,b,c,d,e,f是变换参数。
仿射变换公式可以用来实现平移、旋转、缩放和倾斜等变换,它可以用来改变图像的大小、方向和位置。
它还可以用来改变图像的形状,比如将正方形变成椭圆形。
仿射变换公式在图像处理、机器视觉、图形学等领域有着广泛的应用,它可以用来实现图
像的缩放、旋转、平移等变换,从而改变图像的大小、方向和位置。
此外,它还可以用来
改变图像的形状,比如将正方形变成椭圆形。
总之,仿射变换公式是一种常用的几何变换,它可以用来实现图像的缩放、旋转、平移等变换,从而改变图像的大小、方向和位置,也可以用来改变图像的形状。
它在图像处理、机器视觉、图形学等领域有着广泛的应用。
Opencv的仿射变换函数一、介绍Opencv是一个非常强大的计算机视觉库,它提供了许多函数来处理图像和视频。
其中之一就是仿射变换函数,它可以对图像进行平移、旋转、缩放和倾斜等变换操作,从而改变图像的形状和位置。
本文将详细介绍Opencv中的仿射变换函数,包括函数的使用方法、参数解释以及一些实际应用。
二、仿射变换函数的基本原理和作用仿射变换是一种线性变换,它保持了直线的性质。
简单来说,即变换前后直线上的任意两点,它们之间的中点在变换前后位置也是一样的。
Opencv中的仿射变换函数可以通过设置变换矩阵来实现图像的平移、旋转、缩放和倾斜等操作。
下面是一些常见的仿射变换操作:1. 平移变换(Translation)平移变换是指通过修改图像的位置实现平移的效果。
Opencv中的仿射变换函数cv2.warpAffine()可以通过指定平移矩阵来实现图像的平移,矩阵的形式如下:[[1, 0, dx],[0, 1, dy]]其中,dx和dy分别表示在x和y方向上的平移距离。
2. 旋转变换(Rotation)旋转变换是指通过旋转图像来改变图像的朝向。
Opencv中的仿射变换函数cv2.warpAffine()可以通过指定旋转矩阵来实现图像的旋转,矩阵的形式如下:[[cos(theta), -sin(theta)],[sin(theta), cos(theta)]]其中,theta表示旋转角度。
3. 缩放变换(Scale)缩放变换是指通过改变图像的尺寸来实现缩放的效果。
Opencv中的仿射变换函数cv2.warpAffine()可以通过指定缩放因子来实现图像的缩放,矩阵的形式如下:[[sx, 0],[0, sy]]其中,sx和sy分别表示x和y方向上的缩放因子。
4. 倾斜变换(Shearing)倾斜变换是指通过拉伸图像的一侧来改变图像的形状。
Opencv中的仿射变换函数cv2.warpAffine()可以通过指定倾斜矩阵来实现图像的倾斜,矩阵的形式如下:[[1, kx, 0],[ky, 1, 0]]其中,kx和ky分别表示x和y方向上的倾斜系数。