多晶体塑性变形的特点
- 格式:doc
- 大小:1003.00 KB
- 文档页数:10
一、填空1、典型的塑性成形工艺包括拉深,挤压,轧制,拉拔等。
2、金属发生塑性变形时,其晶内变形的主要方式是滑移和孪生。
3、主应变简图采用主应变的个数和方向描述一点的应变状态,满足体积不变条件的应变状态主应变简图有3种。
4、米塞斯和屈雷斯加两个屈服准则相差最大的应力状态是平面应变状态。
5、不考虑材料的弹性,也不考虑材料硬化的材料模型称为理想刚塑性材料;不考虑材料的弹性,考虑材料硬化的材料模型称为刚塑性硬化材料。
6、超塑性成形工艺方法有结构超塑性和动态超塑性。
(相变超塑性)7、米塞斯和屈雷斯加两个屈服准则一致的应力状态是单向应力状态。
8、按照加工特点来分,塑性成形可以分为块料成形和板料成形两大类,其中,常见的块料成形包括拉拔,锻造,挤压,轧制等工艺。
9、冷挤压钢制零件时,需要对制件表面进行磷化处理,磷化处理后必须进行润滑处理,常用的润滑方法是表面皂化。
10、主应力简图共有9种。
满足体积不变条件的主应变简图共有3种。
11、应力偏张量引起物体产生形状变化;应力球张量引起物体产生体积变化。
12、多晶体的塑性变化包括晶内变形和晶间变形,其中,晶间变形的主要方式是滑移。
13、对数应变的主要特点是准确性、叠加性、可比性。
14、塑性应力应变关系与加载历史有关,变形过程中材料体积不变。
15、单位面积的内力被称为应力。
16、多晶体塑性变形的特点包括:具有不均匀性、不同时性、和相互协调性。
17、塑性成形中的三种摩擦状态分别是:干摩擦,流体摩擦,边界摩擦。
18、常用的求解塑性工程问题的方法有主应力法、滑移线法、上限元法。
19、塑性成形工艺按成形件的特点可以分为块料成形和板料成形。
20、金属发生塑性变形时,其晶内变形的主要方式是滑移和孪生。
21、屈雷斯加屈服准则的物理意义为,当材料的最大剪应力达到某一常数时材料就屈服了;米塞斯屈服准则的物理意义为,当材料的等效应力达到某一定值时,材料就屈服了。
22、关于摩擦产生机理有:表面凸凹学说,分子吸附学说,表面粘着学说。
多晶体的塑性变形机制在固体力学中,塑性变形指的是材料在受力作用下发生永久形变的过程。
对于多晶体材料,其晶粒的排列会对塑性变形机制产生较大影响。
本文将介绍多晶体塑性变形机制的基本原理,并探讨晶界、位错和滑移等因素在多晶体塑性变形中的作用。
1. 多晶体的结构特点多晶体是由许多晶粒组成的材料,每个晶粒是由同一个晶体结构的晶体单元组成。
晶粒之间的结合称为晶界,晶界的存在对塑性变形机制具有重要的影响。
2. 晶界的作用晶界是晶粒之间的界面,其结构与晶体内部的结构存在差异。
晶界可以阻碍晶体的滑移,限制晶体的塑性变形。
晶界的特殊结构使得晶粒在受力作用下不易发生滑移,从而增加了材料的强度。
此外,晶界还会影响晶体的晶粒生长和晶界迁移,在材料加工和成形过程中起到重要的作用。
3. 位错的作用位错是晶体中的一种缺陷,是晶体结构中的原子偏差或错配。
位错的运动可以引起晶格的畸变和滑移,进而导致材料的塑性变形。
在多晶体材料中,位错在晶粒之间传播并产生滑移,从而实现材料的塑性变形。
位错对材料的强度和韧性有重要影响,是塑性变形机制中不可忽略的因素。
4. 滑移的机制滑移是在晶粒内的位错运动引起的晶体形变。
晶体中存在多个滑面和滑矢量,滑面是晶格面,滑矢量是晶体内位错移动的方向。
当外力作用于晶体时,位错从一个滑面滑移到另一个滑面,这样就实现了晶体的塑性变形。
滑移是晶格错配的唯一处理方式,也是多晶体材料的主要塑性变形机制之一。
5. 多晶体塑性变形的机制综合在多晶体材料中,晶界、位错和滑移是相互关联的,共同作用于塑性变形过程中。
晶界的存在会阻碍滑移,从而提高材料的强度。
位错则通过滑移在晶粒内传播,使得晶体发生塑性变形。
滑移的方向和滑面的选择对材料的塑性变形具有重要影响。
通过合理控制晶粒结构、晶界性质和位错密度等因素,可以调控多晶体材料的塑性变形机制,从而提高材料的塑性和韧性。
总结:多晶体材料的塑性变形机制是一个复杂的过程,涉及晶界、位错和滑移等因素。
机械制造基础第二版课后答案邱亚玲第十一章第十一章锻压习题解答11-1多晶体塑性变形有何特点?答:多晶体塑性变形有的特点:①变形分为晶内变形和晶间变形两种。
②多晶体塑性变形首先在那些最有利于变形位向的晶粒中进行。
③各晶粒变形不均匀,每个晶粒内变形也不一致。
11-2何谓冷变形强化?冷变形强化对金属组织性能及加工过程有何影响?答:金属在低温下进行塑性变形时,随着变形程度的增加,金属的硬度和强度升高,而塑性、韧性下降,这种现象称为金属的冷变形强化或加工硬化。
冷变形强化时,金属内对称面附近的晶格发生畸变,甚至产生晶粒破碎现象,金属的强度和硬度越来越高,而塑性和韧性越来越低,变形抗力越来越大,变形也越困难,需要更大的变形力。
11-3何谓金属的再结晶?再结晶对金属组织和性能有何影响?答:将变形金属加热到该金属熔化温度的0.4倍时,金属原子具有更强的的扩散能力,以碎晶块或其它质点为晶核,成长出与变形前晶格结构相同的新的等细晶粒,这个过程称为再结晶。
再结晶可以完全消除塑性变形变形所引起的硬化现象,并使晶粒得到细化,力学性能甚至比塑性变形前更好。
11-4冷变形和热变形的区别是什么?试述它们各自在生产中的应用。
答:据变形温度和变形后的组织不同,通常把在再结晶温度以下进行的变形称为冷变形,在再结晶温度以上进行的变形称为热变形,冷变形的金属表现出加工硬化现象,热变形金属的加工硬化随即被再结晶所消除。
冷变形如冷轧、冷挤、冷拔、冷冲压。
冷变形后金属得到强化,并且获得的毛坯和零件尺寸精度、表面质量都很好。
热变形如热模锻、热轧、热挤压等。
热变形后获得的毛坯和零件的力学性能(特别是塑性和冲击韧度)很好。
11-5何谓金属的可锻性?影响可锻性的因素有哪些?答:可锻性指金属材料在压力加工时,获得优质零件难易程度的性能。
可锻性受材料本身的性质(如化学成分、组织状态)和外界加工条件(如变形温度、变形速度、应力状态)等因素的影响。
11-6钢的锻造温度是如何确定的?始锻温度和终锻温度过高或过低对锻件质量有何影响?答:1、始锻温度一般控制在固相线以下150~250℃。
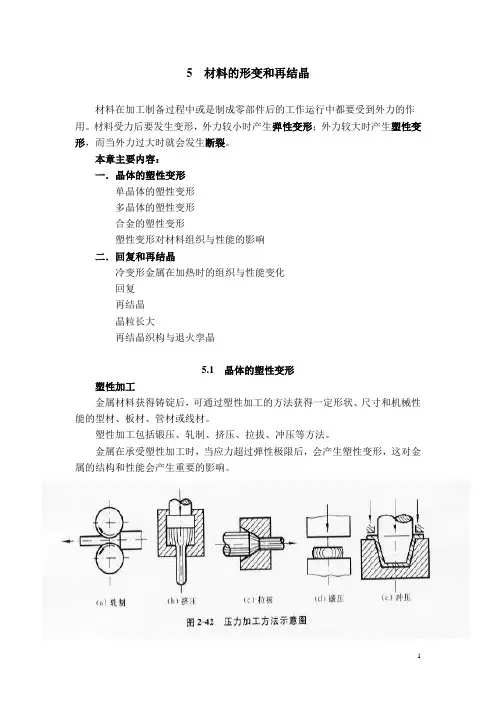
5 材料的形变和再结晶材料在加工制备过程中或是制成零部件后的工作运行中都要受到外力的作用。
材料受力后要发生变形,外力较小时产生弹性变形;外力较大时产生塑性变形,而当外力过大时就会发生断裂。
本章主要内容:一.晶体的塑性变形单晶体的塑性变形多晶体的塑性变形合金的塑性变形塑性变形对材料组织与性能的影响二.回复和再结晶冷变形金属在加热时的组织与性能变化回复再结晶晶粒长大再结晶织构与退火孪晶5.1 晶体的塑性变形塑性加工金属材料获得铸锭后,可通过塑性加工的方法获得一定形状、尺寸和机械性能的型材、板材、管材或线材。
塑性加工包括锻压、轧制、挤压、拉拔、冲压等方法。
金属在承受塑性加工时,当应力超过弹性极限后,会产生塑性变形,这对金属的结构和性能会产生重要的影响。
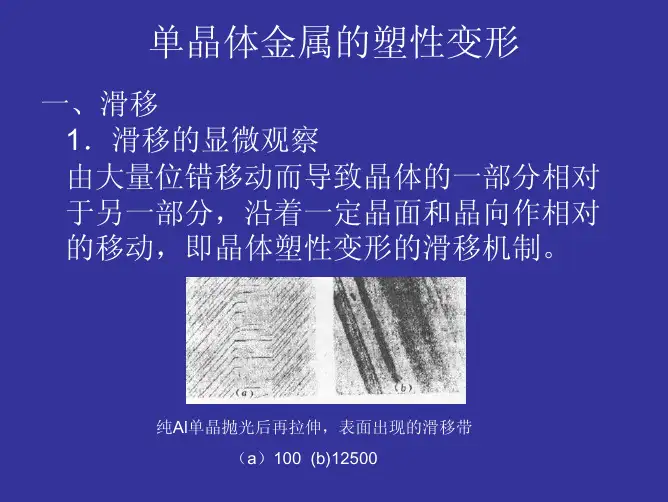
5.1.1 单晶体的塑性变形单晶体塑性变形的两种方式:滑移孪生滑移:滑移是晶体在切应力的作用下,晶体的一部分相对于另一部分沿着某些晶面和晶向发生相对滑动。
滑移线:为了观察滑移现象,可将经良好抛光的单晶体金属棒试样进行适当拉伸,使之产生一定的塑性变形,即可在金属棒表面见到一条条的细线,通常称为滑移线.滑移带:在宏观及金相观察中看到的滑移带并不是单一条线,而是由一系列相互平行的更细的线所组成的,称为滑移带。
滑移系:塑性变形时位错只沿着一定的晶面和晶向运动,这些晶面和晶向分别称为“滑移面”和“滑移方向”。
一个滑移面和此面上的一个滑移方向结合起来组成一个滑移系。
滑移的临界分切应力τk晶体的滑移是在切应力作用下进行的,但其中许多滑移系并非同时参与滑移,而只有当外力在某一滑移系中的分切应力达到一定临界值时,该滑移系方可以首先发生滑移,该分切应力称为滑移的临界分切应力。
滑移的特点晶体的滑移并不是晶体的一部分相对于另一部分同时做整体的刚性的移动,而是通过位错在切应力作用下沿着滑移面逐步移动的结果,因此实际滑移的临界分切应力τk 比理论计算的低得多。
(滑移面为原子排列最密的面)单晶体滑移时,除滑移面发生相对位移外,往往伴随着晶面的转动。

塑性变形行为
形变特征
塑性变形通常具有以下特征:
1. 不可逆性:一旦发生塑性变形,材料无法恢复原来的形状,
而且会在施加外力的条件下不断变形。
2. 负荷依赖性:材料的塑性变形行为与施加的外力大小有关,
通常呈现出负荷增加、应变增加的趋势。
3. 加工硬化:材料在塑性变形后,其抗力会增加,即加工硬化
现象。
这是因为材料的晶界会发生择优取向,从而增加材料的强度。
4. 稳定塑性:一旦材料发生塑性变形,它的形变速率和变形模
式在稳定的载荷下不会发生明显变化。
形变机制
材料的塑性变形通常通过以下几种机制实现:
1. 滑移:在晶体中,塑性变形通常通过晶体平面上的原子滑移来实现。
原子滑移会导致晶体的形状发生变化。
2. 双Glide:双Glide是滑移的特殊情况,其中滑移面和滑移方向不相互垂直。
这会导致晶体中产生剪切应变。
3. 位错运动:位错是晶体中的缺陷,也是材料中塑性变形的主要载体。
位错可以通过滑移和蠕变两种方式来移动。
影响因素
材料的塑性变形行为受多种因素的影响,其中包括:
1. 温度:温度的变化会影响材料内部的晶界运动和位错运动。
2. 应变速率:应变速率的增加会增大材料的塑性变形,这是因为应变速率的增加会加大位错的数量和运动速度。
3. 组织结构:材料的晶粒大小、晶界分布和二相组织等结构特征会影响材料的塑性变形行为。
在工程实践中,深入了解塑性变形行为对于设计和制造高性能材料和零件至关重要。
只有充分理解材料的塑性变形机制和影响因素,才能合理选择材料并进行有效的工艺控制。
多晶体的塑性变形塑性变形过程由于各晶粒间存在位相差,在外力作用下,位向最有利的少数晶粒开始发生塑形变形,随后这些已变形晶粒中的平面位错群在晶界塞积导致应力集中,这一应力集中和外力叠加,使相邻晶粒的位错源开动,驱动相邻晶粒进行协调的(多滑移)塑形变形。
多晶体塑性变形特点:①各晶粒的变形不是同时进行的;②为了协调先发生塑性变形的晶粒形状的改变,相邻各晶粒必须进行多滑移,其中包括取向并不有利的滑移系上同时进行滑移,这样才能保证其形状作各种相应地改变.根据理论计算,每个晶粒至少需要5个独立的滑移系启动;③受晶界及各晶粒位向不同的影响,各晶粒间、晶粒内的变形是不均匀的。
细晶强化①由于晶界的存在,使变形晶粒中的位错在晶界处受阻,滑移带终止于晶界;②由于各晶粒间存在位相差,为了协调变形,要求每个晶粒必须进行多滑移,而滑移时必然要发生位错的相互交割.这两者均将大大提高金属材料的强度.显然,晶界越多,即晶粒越细小,则其强化效果越显著。
这种用细化晶粒增加晶界提高金属强度的方法称为细晶强化。
多晶体的塑性变形与单晶体塑性变形的区别单晶体产生塑性变形,只与其晶体内部位错滑移有关;多晶体不仅需要考虑晶粒内部的位错滑移,还要考虑晶粒之间的变形协调,即要考虑晶间变形。
晶界在塑性变形中的作用可分2个部分来说:协调作用,多晶体在塑性变形时,各晶粒都要通过滑移或孪生而变形,而个晶粒的变形不能是任意的,必须相互协调,以保证晶界处变形的连续;阻碍作用,晶界之间存在位相差,阻碍位错的运动;多晶体的塑性变形受到晶界的阻碍和不同位向晶粒的影响,使得其变形抗力比单晶体高得多。
但是归根到底,其塑性变形方式仍是滑移和孪生。
细化晶粒的方法1、增加过冷度:过冷度增加,形核率与长大速度都增加,但两者的增加速度不同,形核率的增长率大于长大速度的增长率。
在一般金属结晶时的过冷范围内,过冷度越大,晶粒越细小。
2、变质处理:向金属液中添加少量活性物质,促进液体金属内部生核或改变晶体成长过程的一种方法,生产中常用的变质剂有形核变质剂和吸附变质剂。
多晶体金属的塑性变形本质上,与单晶体无区别。
实际上,存在晶界及晶粒之间的位向差,变形过程复杂,变形抗力高的多。
一、晶粒取向的影响多晶体相邻晶粒位向不同,导致多晶体金属塑性变形有以下两个特点: 各晶粒变形的不同时性;各晶粒变形的相互协调性。
各晶粒变形的不同时性软取向的晶粒,首先开始滑移;周围晶粒位向不同,滑移系取向不同,运动的位错不能越过晶界,在晶界处产生位错塞积。
位错塞积造成很高的应力集中,使相邻晶粒中某些滑移系开动,使应力集中松弛,变形从一个晶粒传向另一个晶粒。
随着变形,各晶粒发生转动和旋转,原软取向→硬取向,而停止滑移,同时原硬取向→软取向,而发生滑移。
随外力的持续,多晶体金属中的晶粒分批地、逐步地发生塑性变形。
各晶粒变形的相互协调性多晶体的每个晶粒都处于其他晶粒的包围之中。
要保持晶粒之间的结合和整个晶体的连续性,其变形必须与周围的晶粒相互协调,就使多晶体的塑性变形较单晶体困难,其屈服应力也高于单晶体。
独立滑移系多晶体塑性变形时,要求晶粒至少能在5个独立的滑移系上进行滑移,才能使各晶粒间的变形得到很好的协调。
独立滑移系:指它所产生的晶体形状改变是不能借别的滑移系组合作用而同样得到。
任何变形都可用6个应变分量来表示。
由于塑性变形时体积不变,只有5个独立的应变分量。
独立的应变分量由一个独立的滑移系来产生,需要5个独立滑移系产生5个独立应变分量,以保证晶粒间变形的协调和晶体的连续。
面心立方和体心立方金属滑移系多,能满足,有较好的塑性。
而密排六方金属滑移系少,晶粒间的应变协调性差。
密排六方单晶体处于软取向时,应变可达100% ~200%,但多晶体塑性都很差,强度则较高。
二、晶界(晶粒大小)的影响双晶粒试样变形后,晶界处呈竹节状。
晶界附近滑移受阻,变形量较小。
晶界阻碍位错的通过,即晶界对塑性变形起阻碍作用。
多晶体的强度随晶粒细化而提高。
细晶强化:用细化晶粒来提高材料强度的方法。
细晶强化本质:晶界提高了位错运动的阻力,晶界越多,即晶粒越细,材料的强度越高。
第一章1.什么是金属的塑性?什么是塑性成形?塑性成形有何特点?塑性----在外力作用下使金属材料发生塑性变形而不破坏其完整性的能力;塑性变形----当作用在物体上的外力取消后,物体的变形不能完全恢复而产生的残余变形;塑性成形----金属材料在一定的外力作用下,利用其塑性而使其成型并获得一定力学性能的加工方法,也称塑性加工或压力加工;塑性成形的特点:①组织、性能好②材料利用率高③尺寸精度高④生产效率高2.试述塑性成形的一般分类。
Ⅰ.按成型特点可分为块料成形(也称体积成形)和板料成型两大类1)块料成型是在塑性成形过程中靠体积转移和分配来实现的。
可分为一次成型和二次加工。
一次加工:①轧制----是将金属坯料通过两个旋转轧辊间的特定空间使其产生塑性变形,以获得一定截面形状材料的塑性成形方法。
分纵轧、横轧、斜轧;用于生产型材、板材和管材。
②挤压----是在大截面坯料的后端施加一定的压力,将金属坯料通过一定形状和尺寸的模孔使其产生塑性变形,以获得符合模孔截面形状的小截面坯料或零件的塑性成形方法。
分正挤压、反挤压和复合挤压;适于(低塑性的)型材、管材和零件。
③拉拔----是在金属坯料的前端施加一定的拉力,将金属坯料通过一定形状、尺寸的模孔使其产生塑性变形,以获得与模孔形状、尺寸相同的小截面坯料的塑性成形方法。
生产棒材、管材和线材。
二次加工:①自由锻----是在锻锤或水压机上,利用简单的工具将金属锭料或坯料锻成所需的形状和尺寸的加工方法。
精度低,生产率不高,用于单件小批量或大锻件。
②模锻----是将金属坯料放在与成平形状、尺寸相同的模腔中使其产生塑性变形,从而获得与模腔形状、尺寸相同的坯料或零件的加工方法。
分开式模锻和闭式模锻。
2)板料成型一般称为冲压。
分为分离工序和成形工序。
分离工序:用于使冲压件与板料沿一定的轮廓线相互分离,如冲裁、剪切等工序;成型工序:用来使坯料在不破坏的条件下发生塑性变形,成为具有要求形状和尺寸的零件,如弯曲、拉深等工序。
塑性变形现象对滑移的现象铜塑性变形后的变形线滑移带结构示意图滑移:在切应力作用下,晶体的一部分相对于另一部分沿着一定的晶面和晶向产生相对位移,且不破坏晶体内部原子排列规律性的塑变方式。
滑移由切应力引起滑移只能在晶面上的切应力作用下发生,与正应力无关。
应力分解图(a)滑移前(b)滑移中(c)滑移后晶体滑移过程示意图滑移总是沿着晶体中原子密度最大的晶面(密排面)和其上密度最大的晶向(密排方向)进行。
三种常见金属晶格的滑移系滑移系Array一个滑移面和该面上一个滑移方向的组合。
滑移系的个数=滑移面个数×每个面上所具有的滑移方向的个数滑移系的多少在一定程度上决定了金属塑性的好坏;金属塑性的好坏还与滑移面原子密排程度及滑移方向的数目等因素有关。
一些金属发生滑移的临界分切应力使滑移系开始启动所需的最小分切应力。
临界分切应力(τc ):完善晶体的理论临界分切应力τc≈G/2π。
常用材料试验测定的临界分切应力与理论预测值相差3个量级。
不同滑移系的临界分切应力随温度的变化在切应力作用下晶体的一部分相对于另一部分沿一定孪生:晶面和晶向发生切变的变形过程称孪生。
☐变形的结果,使变形部分和未变形部分的晶格位向沿孪生面成镜面对称☐孪晶——发生切变、位向改变的这一部分晶体称为孪晶。
孪生示意图孪生的临界分切应力要比滑移大得多,只有在金属的滑移受到限制时才有孪晶产生孪生只在滑移很难进行的情况下才发生。
密排六方晶格金属如镁、锌、镉的滑移系较少,塑性较差,容易发生孪生。
孪生的变形量一般不大,但孪生能引起晶格位向的改变,从而使晶体的滑移系由硬位向转为软位向,促使晶体发生滑移变形。
透射电镜下的孪晶有缘学习更多+谓ygd3076或关注桃报:奉献教育(店铺)多晶体的塑性变形同的晶粒组成☐多晶体的塑性变形方式主要仍是滑移与孪生,但应考虑晶界和相邻晶粒位相差的影响多晶体的塑性变形晶界的作用1金属晶粒越细,总的晶界面积越大,金属的屈服强度越高。