金属塑性变形理论
- 格式:pdf
- 大小:315.30 KB
- 文档页数:11


第2章 金属塑性变形的物性方程物性方程又称本构方程,是εσ-关系的数学表达形式。
弹性变形阶段有广义Hooke 定律,而塑性变形则较为复杂。
在单向受力状态下,可由实验测定εσ-曲线来确定塑性本构关系。
但在复杂受力情况下实验测定困难,因此只能在一定的实验结果基础上,通过假设、推理,建立塑性本构方程。
为了建立塑性本构方程,首先需弄清楚塑性变形的开始条件——屈服,以及进入塑性变形后的加载路径等问题。
§2.1 金属塑性变形过程和力学特点2.1.1 变形过程与特点以单向拉伸为例说明塑性变形过程与特点,如图2-1所示。
金属变形分为弹性、均匀塑性变形、破裂三个阶段。
塑性力学视s σ为弹塑性变形的分界点。
当s σσ<时,σ与ε存在统一的关系,即εσE =。
当s σσ≥以后,变形视作塑性阶段。
εσ-是非线性关系。
当应力达到b σ之后,变形转为不均匀塑性变形,呈不稳定状态。
bσ点的力学条件为0d =σ或d P =0。
经短暂的不稳定变形,试样以断裂告终。
若在均匀塑性变形阶段出现卸载现象,一部分变形得以恢复,另一部分则成为永久变形。
卸载阶段εσ-呈线性关系。
这说明了塑性变形时,弹性变形依然存在。
弹塑性共存与加载卸载过程不同的εσ-关系是塑性变形的两个基本特征。
由于加载、卸载规律不同,导致εσ-关系不唯一。
只有知道变形历史,才能得到一一对应的εσ-关系,即塑性变形与变形历史或路径有关。
这是第3个重要特征。
事实上,s σσ>以后的点都可以看成是重新加载时的屈服点。
以g 点为例,若卸载则εσ-关系为弹性。
卸载后再加载,只要g σσ<点,εσ-关系仍为弹性。
一旦超过g 点,εσ-呈非线性关系,即g 点也是弹塑性变形的交界点,视作继续屈服点。
一般有s g σσ>,这一现象为硬化或强化,是塑性变形的第4个显著特点。
在简单压缩下,忽略摩擦影响,得到的压缩s σ与拉伸s σ基本相同。
但是若将拉伸屈服后的试样经卸载并反向加载至屈服,反向屈服一般低于初始屈服。
金属塑性变形原理1、变形和应力1.1塑性变形与弹性变形金属晶格在受力时发生歪扭或拉长,当外力未超过原子之间的结合力时,去掉外力之后晶格便会由变形的状态恢复到原始状态,也就是说,未超过金属本身弹性极限的变形叫金属的弹性变形。
多晶体发生弹性变形时,各个晶粒的受力状态是不均匀的。
当加在晶体上的外力超过其弹性极限时,去掉外力之后歪扭的晶格和破碎的晶体不能恢复到原始状态,这种永久变形叫金属的塑性变形。
金属发生塑性变形必然引起金属晶体组织结构的破坏,使晶格发生歪扭和紊乱,使晶粒破碎并且使晶粒形状发生变化,一般晶粒沿着受力方向被拉长或压缩。
1.2应力和应力集中塑性变形时,作用于金属上的外力有作用力和反作用力。
由于这两种外力的作用,在金属内部将产生与外力大小相平衡的内力。
单位面积上的这种内力称为应力,以σ表示。
σ=P/S式中σ——物体产生的应力,MPa:P——作用于物体的外力,N;S——承受外力作用的物体面积,mm2。
当金属内部存在应力,其表面又有尖角、尖缺口、结疤、折叠、划伤、裂纹等缺陷存在时,应力将在这些缺陷处集中分布,使这些缺陷部位的实际应力比正常应力高数倍。
这种现象叫做应力集中。
金属内部的气泡、缩孔、裂纹、夹杂物及残余应力等对应力的反应与物体的表面缺陷相同,在应力作用下,也会发生应力集中。
应力集中在很大程度上提高了金属的变形抗力,降低了金属的塑性,金属的破坏往往最先从应力集中的地方开始。
2、塑性变形基本定律2.1体积不变定律钢锭在头几道轧制中因其缩孔、疏松、气泡、裂纹等缺陷受压缩而致密,体积有所减少,此后各轧制道次的金属体积就不再发生变化。
这种轧制前后体积不变的客观事实叫做体积不变定律。
它是计算轧制变形前后的轧件尺寸的基本依据。
H、B、L——轧制前轧件的高、宽、长;h、b、l——轧制后轧件的高、宽、长。
根据体积不变定律,轧件轧制前后体积相等,即HBL=hbl2.2最小阻力定律钢在塑性变形时,金属沿着变形抵抗力最小的方向流动,这就叫做最小阻力定律。

金属材料的塑性变形机制研究引言:金属材料是现代工业领域中应用广泛的材料之一。
在实际应用中,金属材料常常需要经历塑性变形才能满足工程要求。
因此,研究金属材料的塑性变形机制对于优化材料性能和提高生产效率具有重要意义。
一、金属材料的塑性变形现象金属材料的塑性变形是指在外力作用下,经过一定的变形过程后,保持新形状,并具有一定的强度和延展性。
在实际应用中,金属材料常常需要经历塑性变形才能满足工程要求。
常见的金属材料塑性变形形式包括拉伸、压缩、扭转等。
二、金属材料塑性变形的机制1. 滑移机制滑移是金属材料塑性变形的主要机制之一。
滑移是指在外力作用下,金属晶体中的原子沿特定晶面和滑移方向产生有序的滑移位错。
滑移位错的运动导致晶体整体的塑性变形。
2. 原子扩散机制原子扩散是金属材料塑性变形的另一种机制。
在原子扩散过程中,金属晶体中原子的位置发生移动,从而引起晶体的形状改变。
原子扩散可以通过热量的供给或应力的施加来促进,从而实现金属材料的塑性变形。
3. 界面滑移机制金属材料中晶界和相界的存在对于塑性变形机制起着重要的作用。
晶界和相界可以提供额外的滑移位错和晶体间的滑移通道,从而促进金属材料的塑性变形。
三、金属材料塑性变形机制的研究方法1. 金相显微镜观察金相显微镜是研究金属材料塑性变形机制常用的工具。
通过显微观察金属材料的显微结构,可以揭示其塑性变形的机制和行为。
2. 分子动力学模拟分子动力学模拟是一种通过计算模拟方法研究金属材料塑性变形机制的有效手段。
通过建立合适的模型和参数,可以模拟金属材料的原子行为,进而揭示其塑性变形机制。
3. 位错理论研究位错理论是解释金属材料塑性变形机制的重要理论之一。
通过研究位错的形成、运动和相互作用等方面的机制,可以深入了解金属材料的塑性变形行为。
结论:金属材料的塑性变形机制是一个复杂而重要的研究领域。
了解金属材料的塑性变形机制对于优化材料性能、提高生产效率以及推动工程技术的发展具有重要意义。
金属塑性成形原理金属塑性成形是指通过外力作用下,金属材料在一定温度范围内发生塑性变形的过程。
金属塑性成形是制造工业中常用的一种加工方法,它能够制造出各种形状和尺寸的零部件,广泛应用于汽车、航空航天、机械制造等领域。
金属塑性成形的原理是基于金属材料的内部结构和性能特点,通过外力使其发生形变,从而得到所需的形状和尺寸。
金属材料的塑性成形主要依靠金属的塑性变形特性,其原理主要包括以下几个方面:一、应力和应变。
金属材料在受到外力作用时,会产生应力和应变。
应力是单位面积上的力,而应变是单位长度上的变形量。
金属材料在受到外力作用时,会发生应力和应变的变化,从而产生塑性变形。
二、晶粒滑移。
金属材料的内部结构是由大量的晶粒组成的,晶粒之间存在着晶界。
当金属受到外力作用时,晶粒会沿着晶界发生滑移,从而使得金属材料发生塑性变形。
晶粒滑移是金属塑性成形的重要原理之一。
三、冷加工和热加工。
金属材料在不同温度下的塑性变形特性是不同的。
在常温下进行的金属塑性成形称为冷加工,而在一定温度范围内进行的金属塑性成形称为热加工。
冷加工和热加工对金属材料的塑性成形有着不同的影响,需要根据具体的工艺要求来选择合适的加工方法。
四、金属材料的变形机制。
金属材料的塑性变形主要有拉伸、压缩、弯曲、挤压等形式。
这些变形机制是通过外力作用下,金属材料内部晶粒的滑移和变形来实现的。
不同的变形机制对应着不同的加工工艺和设备,需要根据具体的要求来选择合适的成形方式。
综上所述,金属塑性成形的原理是基于金属材料的内部结构和性能特点,通过外力使其发生形变,从而得到所需的形状和尺寸。
金属塑性成形是制造工业中常用的一种加工方法,它能够制造出各种形状和尺寸的零部件,广泛应用于汽车、航空航天、机械制造等领域。
深入理解金属塑性成形的原理,对于提高加工工艺的效率和质量具有重要意义。
二、金属的塑性变形材料受力后要发生变形,变形可分为三个阶段:弹性变形;弹-塑性变形;断裂。
外力较小时产生弹性变形,外力较大时产生塑性变形,而当外力过大时就会发生断裂。
在整个变形过程中,对材料组织、性能影响最大的是弹-塑性阶段的塑性变形部分。
如:锻造、轧制、拉拔、挤压、冲压等生产上的许多加工方法,都要求使金属产生变形,一方面获得所要求的形状及尺寸,另一方面可引起金属内部组织和结构的变化,从而获得所要求的性能。
因此研究塑性变形特征与组织结构之间相互关系的规律性,具有重要的理论和实际意义。
弹性变形(Elastic Deformation)1.1 弹性变形特征(Character of Elastic Deformation)1.变形是可逆的;2.应力与应变保持单值线性函数关系,符合Hooke定律:σ=Eε,τ=Gγ,G=E/2(1-ν) 3.弹性变形量随材料的不同而异。
1.2 弹性的不完整性(Imperfection of Elastane)工程上应用的材料为多晶体,内部存在各种类型的缺陷,弹性变形时,可能出现加载线与卸载线不重合、应变的发展跟不上应力的变化等现象,称为弹性的不完整性,包括包申格效应、弹性后效、弹性滞后等。
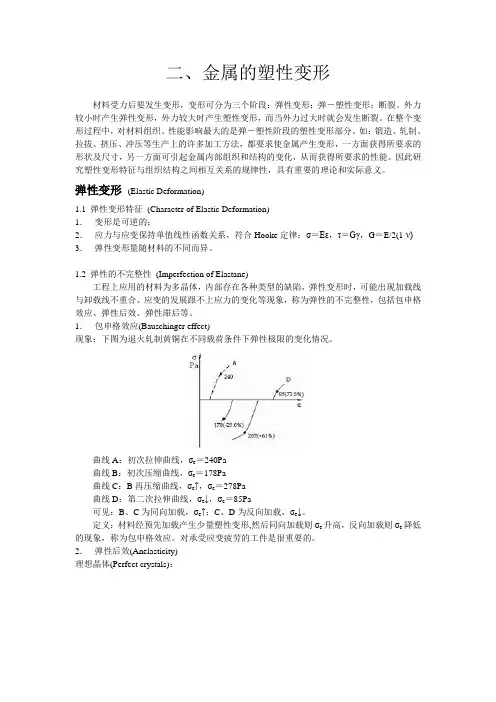
1.包申格效应(Bauschinger effect)现象:下图为退火轧制黄铜在不同载荷条件下弹性极限的变化情况。
曲线A:初次拉伸曲线,σe=240Pa曲线B:初次压缩曲线,σe=178Pa曲线C:B再压缩曲线,σe↑,σe=278Pa曲线D:第二次拉伸曲线,σe↓,σe=85Pa可见:B、C为同向加载,σe↑;C、D为反向加载,σe↓。
定义:材料经预先加载产生少量塑性变形,然后同向加载则σe升高,反向加载则σe降低的现象,称为包申格效应。
对承受应变疲劳的工件是很重要的。
2.弹性后效(Anelasticity)理想晶体(Perfect crystals):实际金属(Actual metal):弹性后效示意图这种在弹性极限范围内,应变滞后于外加应力,并和时间有关的现象称为弹性后效。

金属塑性变形原理金属塑性变形是指金属材料经过外力作用下,由原来的固态结构发生变形,而不会恢复到原始形状的现象。
金属塑性变形是金属加工过程中的重要现象,也是金属材料学的基础知识之一。
金属塑性变形的原理是金属材料内部的晶体结构发生改变。
金属的晶体结构由原子或离子组成,其中原子或离子按照一定的方式排列,形成了晶体的结晶格,并且由晶粒间的晶界分隔开来。
在金属塑性变形过程中,加入的外力使得原子或离子离开原来的位置,发生位移,并且使得晶粒间的晶格发生变形。
在外力作用下,晶粒内的晶界也会发生位移,产生滑移。
滑移是金属塑性变形的基本机制之一。
滑移是指晶体中的原子或离子在晶胞内沿着特定的晶面或晶轴方向移动,形成滑移面和滑移方向。
滑移是一种原子密集度不变的塑性变形方式,即滑移面上的原子密集度和滑移前后相等。
滑移过程中,原子或离子之间的相互作用能量发生改变,导致滑移力的产生。
滑移力的产生使晶体产生滑移应力,使得滑移面上的原子或离子沿着滑移方向发生位移,从而引起整个晶粒的塑性变形。
除了滑移,金属材料的塑性变形还涉及扩散、再结晶等机制。
扩散是指金属内部原子或离子相互扩散,使得原子或离子重新排列,从而使晶体发生塑性变形。
再结晶是指金属材料在过度变形后,晶体结构发生重组,原晶体结构消失而形成新的晶体结构的过程。
再结晶是一种细化晶粒的方法,可以提高金属材料的塑性、延展性和硬度。
金属塑性变形的原理还与金属材料的晶体结构、晶界、晶体缺陷等因素有关。
金属材料的晶体结构与晶粒尺寸、晶粒取向有关,不同的晶体结构对塑性变形的机制有影响。
晶界是指晶粒之间的界面,晶界对金属材料的弹性和塑性性能有重要影响。
晶体缺陷包括晶体缺陷、晶界缺陷和位错等,对金属塑性变形有密切关系。
总之,金属塑性变形是金属加工中的重要现象,其原理涉及滑移、扩散、再结晶等机制。
金属塑性变形的机制与金属材料的晶体结构、晶界、晶体缺陷密切相关,对金属材料的性能和加工性能有重要影响。