机器人干涉区及互锁
- 格式:doc
- 大小:112.00 KB
- 文档页数:5
干涉定义:两个或多个事物在时间轴上和空间轴上有重叠,即在某个时间内会同时到达同一区域实际可以减少的干涉区:工艺分配上要减少空间轴的重叠;实际存在但运行可以错开的干涉区:焊点点序定义时要减少时间轴的重叠,这个意义的干涉区要求研究干涉信号编制方法1、确定机器人工作顺序2、确定彼此的所有干涉区3、确定个机器人达到各干涉区的时间4、使用PROJECT以项目的形式将两机器人任务确定,并包含任务先后关系5、从时间轴上对比到达干涉区的先后顺序,先到先进干涉区6、因为任何一者先完成也没有意义,所以两者任务是完全关联的,有先后关系的一、下面介绍的2个机器人的I/O干涉信号设定时非常经典的,经过日本和台设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOTSTEP1應如何設定干涉信號:M34【3】先进入的机器人进入干涉区前将干涉信号OFFSTEP2應如何設定干涉信號:M34【3】再次将干涉信号OFF,确认进入干涉区后,其他机器人不进入干 I3 wait等待I3信号,I3 ON后,才能进入干涉区STEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉1R ROBOTSTEP1應如何設定干涉信號:M32【3】STEP2應如何設定干涉信號:I3 wait等待I3信号,I3 ON后,才能进入干涉区 M34【3】机器人进入干涉区后将干涉信号OFFSTEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉二、根据上述1个干涉区,推广至多干涉区(各干涉区相互干涉)设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOT1R ROBOTS1:M34[3]S1:M32[3]S2:M34[3]S2:I3 waitI3 wait M34[3]干涉区1干涉区1S3:M32[3]S3:M32[3]S4:M34[3]S4:S5:M34[3]S5:I3 waitI3 wait M34[3]干涉区2干涉区2S6:M32[3]S6:M32[3]S7:M34[3]S7:S8:M34[3]S8:I3 waitI3 wait M34[3]干涉区3干涉区3S9:M32[3]S9:M32[3]三、根据上述1个干涉区,推广至多干涉区(干涉区相互独立)设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/51R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:S1:S2:S3:S4:S5:S6:S7:S8:S9:四、根据上述1个干涉区,推广至多干涉区(干涉区既有相互独立,又有相互设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/5S4S7S71L ROBOT1R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:时到达同一区域。
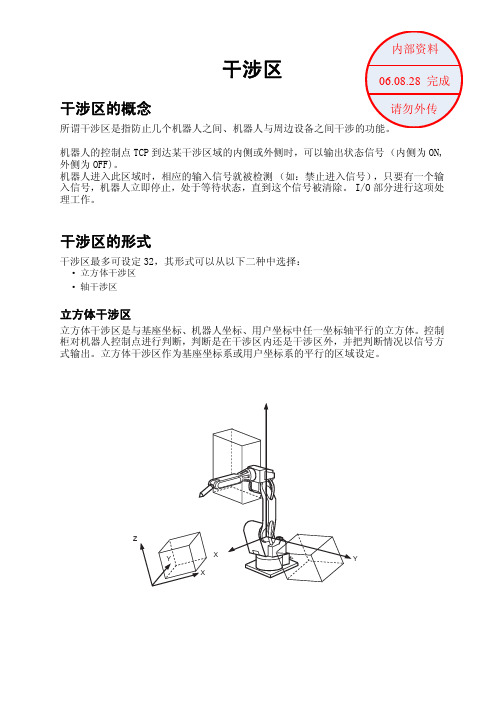
干涉区干涉区的概念机器人的控制点TCP 到达某干涉区域的内侧或外侧时,可以输出状态信号(内侧为ON,外侧为OFF)。
机器人进入此区域时,相应的输入信号就被检测(如:禁止进入信号),只要有一个输入信号,机器人立即停止,处于等待状态,直到这个信号被清除。
I/O 部分进行这项处理工作。
干涉区的形式干涉区最多可设定32,其形式可以从以下二种中选择:• 立方体干涉区• 轴干涉区立方体干涉区立方体干涉区是与基座坐标、机器人坐标、用户坐标中任一坐标轴平行的立方体。
控制柜对机器人控制点进行判断,判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出。
立方体干涉区作为基座坐标系或用户坐标系的平行的区域设定。
轴干涉区轴干涉区,是指判断各轴当前位置并输出信号的功能。
设定各轴正方向、负方向各自动作区域的最大值和最小值,判断各轴当前值是在区域内侧或外侧,并将该状态作为信号输出。
(ON: 区域内, OFF: 区域外)干涉区的建立方法立方体干涉区的建立方法立方体干涉区的设定方法有以下3种:输入立方体的坐标值输入立方体坐标的最大值和最小值。
具体操作步骤参考操作要领书 10-22。
示教顶点用轴操作键把机器人移到立方体的最大/最小位置。
具体操作步骤参考操作要领书 10-25。
输入立方体边长并示教中心点输入立方体的三边边长(轴长)数值后,用轴操作键把机器人移到中心点。
具体操作步骤参考操作要领书 10-26。
轴干涉区的建立方法数值输入轴数据具体操作步骤参考操作要领书 10-27。
用轴操作键移动机器人设定轴数据具体操作步骤参考操作要领书 10-29。
干涉区的工作机理梯形图程序40090 顺序等待此信号为开时,机器人的动作暂时停止。
功能与“hold暂停”相似,但有以下两点不同。
1. 机器人在动作过程中如果此信号为开,机器人为暂时停止状态,内部保持运转状态。
移动命令(MOV)以外的命令执行时不受影响。
“启动”灯为点亮状态。
“运转中”信号为开。

机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
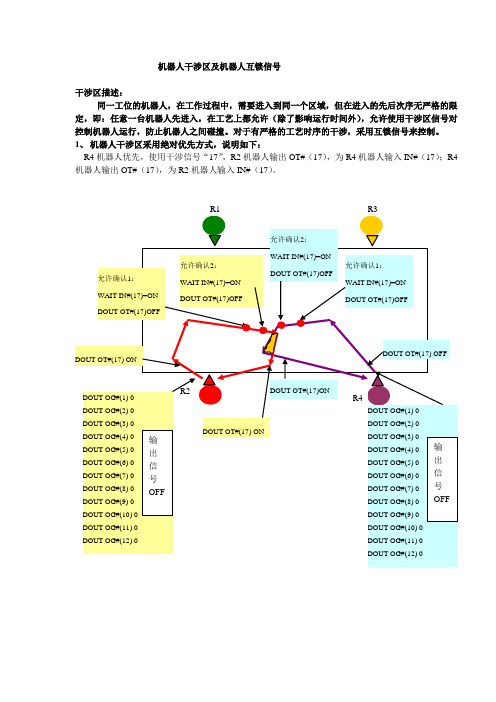
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系: 信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、 不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、 干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC 程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R2机器人与R4机器人之间的互锁:R2机器人为焊接机器人,在工作台位置进行工件焊接,R4为搬运机器人,2台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
机器人干涉区及互锁机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系:信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4、机器人之间的互锁:工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R22台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
C32B主线机器人I/O表与干涉区2016目录目录 (1)干涉区讲解 (1)机器人与附属设备站点划分 (5)现场硬接线信号分配表 (5)烟台宇信C32B项目信号总表 (6)UB10-1 (9)UB10-2 (11)UB20-1 (12)UB20-2 (13)UB20-3 (14)UB20-4 (15)UB30-1 (16)UB30-2 (17)UB30-3 (18)UB30-4 (19)UB40-1 (20)UB40-2 (21)UR30-1 (22)UR50-1 (23)UR50-2 (24)UR50-3 (25)UR50-4 (27)UR60-1 (29)UR60-2 (30)UR60-3 (31)UR60-4 (32)UR70-1 (33)UR70-2 (34)UR70-3 (35)UR70-4 (36)UR80-1 (37)UR80-2 (38)MB20-1 (39)MB20-3 (43)MB20-4 (44)MB20-5 (45)MB20-6 (46)MB20-7 (47)MB20-8 (48)MB20-9 (49)MB20-10 (50)MB40-1 (51)MB40-2 (52)MB40-3 (53)MB40-4 (54)MB50-1 (55)MB50-2 (56)MB60-1 (57)MB70-1 (58)MB70-2 (59)MB70-3 (61)MB70-4 (62)MB70-5 (63)MB70-6 (64)MB80-1 (65)MB80-2 (66)MR20-1 (67)MR20-2 (68)MR20-3 (69)MR20-4 (70)MR30-1 (71)MR30-2 (72)MR30-3 (73)MR30-4 (74)MR40-1 (75)MR40-2 (76)MR50-1 (77)MR50-3 (79)MR50-4 (80)MR60-1 (81)MR60-2 (82)MR60-3 (83)MR60-4 (84)MR100-1 (85)MR100-2 (86)MR100-3 (87)MR100-4 (88)MR110-1 (89)MR110-2 (90)MR110-3 (91)MR110-4 (92)MR130-1 (93)MR140-1 (94)MR140-2 (95)MR140-3 (96)MR140-4 (97)干涉区讲解干涉区:同一工位的机器人,在运行工作中,需要和另外一台或多台机器人进入同一工作空间范围内,定义为干涉区。
干涉区信号设置方法1、绝对优先干涉区设置方法绝对优先干涉区是指两台机器人之间的干涉区,一台机器人具有绝对优先的权利,即该机器人首先进入干涉区,作业完成之后另一台机器人才可以进入该干涉区工作。
这种干涉区信号设置方法如图1所示。
图1中,M002机器人为绝对优先,1号输入输出信号为干涉信号,2号输入输出信号为复位信号。
初始状态下,M001机器人将干涉信号输出设为ON,M002机器人将干涉信号输出设为OFF,即M002机器人可以进入干涉区,而M001机器人不可进入干涉区。
M002机器人在进入干涉区之前首先确认M001机器人干涉信号输出确实为ON,即M001确实不在其共有的干涉区内,M002进入干涉区进行作业。
作业完成后退出干涉区,将干涉信号打开,允许M001机器人进入。
M001机器人进入干涉区前检测M002干涉信号是否打开,打开情况下,M001关闭自身干涉信号,以防止M002再度进入的可能,同时M001进入干涉区进行作业。
作业完成后退出干涉区,发出复位信号,告诉M002自己已完成干涉区作业。
M002得到M001的复位信号后,确定M001已经得到过干涉信号,并完成了干涉区的作业,将干涉信号关闭。
绝对优先干涉区适用于两个机器人有明确的进入干涉区的顺序,并且在整个作业过程中只进入该干涉区一次的情况。
???,M002???????图1 绝对优先干涉区2、重复干涉区设置方法重复干涉区是指两台机器人之间的干涉区,两台机器人会重复进入,而且有可能同时进入,两台机器人之间没有绝对优先的关系,谁先到达干涉区,谁先进入。
这种干涉区信号设置方法如图2所示。
图2中,信号3为机器人M003和M004之间的干涉信号。
初始状态下,M003和M004机器人将干涉信号输出设为ON,即M003和M004机器人都可以进入干涉区。
如果M003机器人先达到干涉区,执行WAIT IN#(3)=ON,DOUT OT#(3) OFF命令。
此时M004未到达干涉区,3号信号的输出为ON,因此M003能够进入干涉区。
机器人干涉区及机器人互锁信号
干涉区描述:
同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:
R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:
1)、关于程序结束时,干涉区信号的状态ON :
程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:
防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系: 信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、 不同的干涉区使用不同的干涉信号:
如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、 干涉信号地址分配:
从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC 程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:
4工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R2机器人与R4机器人之间的互锁:
R2机器人为焊接机器人,在工作台位置进行工件焊接,R4为搬运机器人,2台机器人在工作台位置处存在干涉现;
工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
果使用IN(36)、OT(36)为互锁信号,则R2机器人完成焊接,到达位置(1)给出OT#(36)ON,R2机器人发出与R4机器人不干涉信号,到达位置(2)的时间大于0.5秒(即:大于信号传输+2*生产线PLC程序执行时间),或采取延时方式延时0.5秒关闭允许信号OT#(36)OFF;该信号在生产线PLC内进行自锁,当R4机器人完成抓件动作或循环完成后复位自锁信号。
33-40
5、
OT 47 RB与PLC互锁信号15 IN 47 RB与PLC互锁信号15
OT 48 RB与PLC互锁信号16 IN 48 RB与PLC互锁信号16
自锁:典型的应用是用自己的常开触点与开启按钮并联,锁定回路。
即使开启按钮弹开了,由于有自锁触点的连接,仍可形成回路。
这种接法就叫做“自锁”。
互锁:典型的应用是将继电器A的常闭触电串联在其他回路当中,而其他回路中继电器B的常闭触电串联在继电器A的回路中。
当继电器A的线圈先得电时,它的常闭触电会断开继电器B的回路。
相反,如果继电器B的线圈先得电时,它的常闭触电会断开继电器A的回路。
这样互相牵制,起到一定的逻辑作用。
这种接法就叫“互锁”。
在一个回路中,即有自锁又有互锁的就叫做“联锁”。
自锁,是在接触器线圈得电后,利用自身的常开辅助触点保持回路的接通状态,一般对象是对自身回路的控制。
如把常开辅助触点与启动的电动开关并联,这样,当启动按钮按下,接触器动作,辅助触电闭合,进行状态保持,此时再松开启动按钮,接触器也不会失电断开。
一般来说,在启动按钮和辅助按钮并联之外,还要在串联一个按钮,起停止作用。
点动开关中作启动用的选择常开触点,做停止用的选常闭触点。
互锁,说得是几个回路之间,利用某一回路的辅助触点,去控制对方的线圈回路,进行状态保持或功能限制。
一般对象是对其他回路的控制。
联锁,就是设定的条件没有满足,或内外部触发条件变化引起相关联的电气、工艺控制设备工作状态、控制方式的改变。
“在一个回路中,即有自锁又有互锁的就叫做“联锁””这种说法并不科学,也不全面。