数字信号处理期末复习讲诉
- 格式:ppt
- 大小:820.00 KB
- 文档页数:23
课程主要内容及基本要求一、离散傅里叶变换及应用(DFT & FFT)1.DFT的定义、性质、计算及应用——第3章2.DFT的快速算法(FFT)——第4章➢傅里叶变换的4种形式,傅里叶变换形式与时域信号的对应关系。
➢DFS的定义性质计算,理解周期卷积过程。
➢DFT的定义、计算、性质,掌握圆周移位、共轭对称性、圆周卷积与线性卷积的关系。
➢理解掌握频谱分析过程,频谱分析参数(DFT点数、频谱分辨力F、记录长度Tp等)的计算,存在的误差及减少措施。
➢理解掌握DIT和DIF的基2-FFT算法原理、运算流图、计算量➢理解IFFT算法原理➢了解CZT算法及分段卷积方法(重叠相加法、重叠保留法)二、数字滤波器设计与实现(IIR Filter & FIR Filter)1.IIR Filter 设计与实现——第6、5章2.线性相位FIR Filter 设计与实现——第7、5章➢掌握IIR滤波器结构、FIR滤波器结构,结构形式的主要特点、与H(z)表达式的关系➢冲激响应不变及双线性变换法原理、变换方法、特点、适用场合➢巴特沃思和切比雪夫Ⅰ型低通滤波器设计方法、频响特点、极点分布特点➢掌握利用模拟滤波器设计IIR数字滤波器的设计过程➢了解利用频带变换法设计各种类型数字滤波器的方法➢掌握线性相位FIR滤波器的特点➢理解掌握窗函数设计方法,窗函数主要指标和特点,影响过渡带宽度与阻带衰减的因素➢了解频率采样设计法第3章 离散傅里叶变换——复习1. 基本概念➢ 信号:信息的物理表现形式。
➢ 序列(离散时间信号):时间离散,幅值连续(无限精度)。
➢ 数字信号:时间离散,幅值量化(有限精度)。
➢ 信号处理:从信号中提取有用信息。
➢ 数字信号处理:用数字方法去处理。
或者说:用数字或符号表示的序列来描述信号,再用计算机或专用处理设备以数值计算的方法来处理这些序列,得到所需序列,提取信息。
2. Z 变换➢ Z 变换的定义:对离散时间信号(序列)的变换。
数字信号处理总复习要点考试题型第一题填空题(28/30分)第二题判断题(选择题)(10/15分)第三题简答题、证明题(10分)第四题计算题(40-50分)总复习要点绪论1、数字信号处理的基本概念2、数字信号处理实现的方法:硬件实现、软件实现、软硬件结合实现3、数字信号处理系统的方框图,前后两个低通的作用4、数字信号处理的优缺点第一章离散时间信号与系统1、正弦序列的周期性2、折叠频率3、抗混叠滤波器4、原连续信号的谱,对应的采样信号的谱第二章离散时间傅立叶变换(DTFT )1、 z 变换的定义,2、 DTFT 、IDTFT 的定义(作业)3、序列的频谱(幅度谱、相位谱)4、序列谱的特点:时域离散、频谱连续,以2π为周期。
5、 DTFT 的性质,见P78表2-3时移性质、频移性质、指数加权、线性加权、卷积定理对称性1、对称性2 (共轭对称、共轭反对称)()[()]()j j nn X e DTFT x n x n eωω∞==∑1()[()]()2j j j nx n IDTFT X e X e e d πωωωπωπ-==6、序列的傅立叶变换和模拟信号傅立叶变换之间的关系(指Xa(j Ω)、Xa(j Ω)、和X(e j ω)三者之间的关系)模拟频率fs 对应数字频率2π,折叠频率fs/2对应数字频率π。
7、周期序列的离散傅立叶级数(DFS )8、周期序列的傅立叶变换9、离散时间系统的差分方程、H(z),H(e jw),h(n)。
第三章离散傅立叶变换(DFT )1、周期序列离散傅立叶级数(DFS)的性质2、离散傅立叶变换的定义(N ≥M )1?()()a a s k Xj X j jk T∞=-∞Ω=Ω-Ω∑()()|j TX eXaωΩ==Ω12()()j a k X eX jjk TTTωωπ∞=-∞=-∑211()[()]()N jknNk x n ID FS X k X k e Nπ-===∑21[()]()N j knNn D FS x n xn e π--===∑ ()X k 22()()k X k k Nππδω∞=-∞=-∑[()]DTFT xn 11()[()]()N knNk x n ID FT X k X k W N--===∑1()[()]()N knNn X k DFT x n x n W -===∑3、DFT 的特点:时域离散、频域离散。
DSP简易笔记二、时域中的离散时间信号1. 任何复序列都可以表示为其共轭对称部分与共轭反对称部分的和2. 序列的总能量3. 抽样过程,采样频率,采样角频率,归一化角频率,单位为弧度三、频域中的离散时间信号1. 连续时间傅里叶变换(CTFT),逆变换2. 帕塞瓦尔定理3. 离散时间傅里叶变换(DTFT)4. DTFT的对称关系5. 奈奎斯特准则四、离散时间系统1. 离散系统性质的判定方法①线性(Linear)若令,而,则可确定该系统是线性的;反之则为非线性注:若系统中有常数项,如y[n]=x[2-n]+a,a为非零常数,则该系统必然非线性;若系统不齐次,如y[n]=x^2[n],则也为非线性②时不变性(Time Invariant)若令x1[n]=x[n-n0],而y1[n]也可表示为y[n-n0],则可确定该系统是时不变系统;反之则为时变系统注:若系统带有变系数,如y[n]=nx[n],或者系统内部发生了伸缩、翻转,如y[n]=x[2-n]、y[n]=x[2n],则该系统必然为时变系统③因果性(Causal)若y[n0]仅仅依赖于n<n0的x[n],而不依赖于n>n0的x[n],则y[n]为因果系统④稳定性(BIBOstable)若对于所有n,,而,此时y[n]BIBO稳定2. 相位延迟3. 群延迟例:(此处可结合第七章7.3)五、有限长离散变换0. 时域频域关系,普通的门-Sa转换门函数时域周期,Sa函数频域离散;门函数时域离散,Sa函数频域周期,且易知离散程度越高,周期越短1. 离散傅里叶变换(DFT)其中,逆变换2. DFT的矩阵法计算以及3. 与DTFT的关系4. 实序列DFT的性质注意,若x[n]为实序列,则X[k]与X[N-k]呈共轭的关系!5. 离散傅里叶变换定理格外注意时移性质时候DFT的正负号!与DTFT的正负是相反的(因为W N中已包含负号)六、z变换1. 定义2. z变换性质七、变换域中的LTI离散时间系统1. 全通函数(AllPass)零极点特征:极点零点镜像对称(in a mirror image symmetry),且极点必在单位圆内、零点必在单位圆外性质:(可由A(z)绝对值的平方等于A(z)与A(z)的共轭乘积推导而得)2. 四种线性相位函数判定依据:a. 若具有偶振幅响应的FIR滤波器有一个对称的冲激响应,则它具有线性相位响应;b. 若具有奇振幅响应的FIR滤波器有一个反对称的冲激响应,则它具有线性相位响应Type1、2:Type3、4:例.x[n]={4,2,1,0,1,2,4},其N=6(注意是6不是7!6代表6阶),故易知其为Type1,相位函数为θ(ω)=-3,群延迟为3零极点特征:零点关于单位圆镜像对称,其中3. 最小相位/最大相位函数零极点特征:所有零点都在单位圆内的因果稳定传输函数为最小相位传输函数;所有零点都在单位圆外的因果稳定传输函数为最大相位传输函数4. 梳状滤波器作用:产生多通带与多阻带的滤波器下图为L=5的原型为H(z)=0.5(1+z^-L)的低通滤波器产生的梳状滤波器八、数字滤波器结构1. FIR数字滤波器①直接型②级联型③线性相位FIR滤波器特征:把乘法器的数量减少到几乎一半线性相位响应的优点:⏹Design problem contains only real arithmetic and not complexarithmetic;⏹Linear-phase filter provide no delay distortion and only a fixed amountof delay;⏹For the filter of length M (or order M-1) the number of operations are ofthe order of M/2 as we discussed in the linear phase implementation.2. IIR数字滤波器①直接II型(典范,Canonic)②级联型③并联I型九、IIR数字滤波器设计1. 数字滤波器指标δp与δs称为波纹峰值,峰值通带波纹(Peakpassbandripple),其值越小越好,理想情况为0,最小阻带衰减(Minimumstopbandattenuation),其值越大越好2.设计IIR数字滤波器①利用逆变换,从低通数字滤波器的指标得到原型模拟滤波器的指标(预畸变)a. 冲激响应不变法(Impulse Invariance Response)b. 双线性变换法(Bilinear transformation)也即,T=2②确定满足原型滤波器指标的模拟传输函数H a(s)这一步可由MATLAB完成实现③利用对应的滤波器变换将模拟传输函数Ha(s)变换成数字传输函数G(z)a. 冲激响应不变法,s=1/T*lnzb. 双线性变换法④利用合适的频带变换,将低通数字滤波器转换成所需的数字滤波器十、FIR数字滤波器设计1. 吉布斯现象(GibbsPhenomenon)定义:对给定的理想滤波器的冲激响应系数进行简单截断,得到的因果FIR滤波器的在其各自的幅度响应中呈现振荡现象减弱方法:利用两边均逐渐平滑减小到零的窗函数,或在通带和阻带有平滑的过渡带2. 利用窗口函数设计FIR滤波器的步骤①根据最小阻带衰减(minimum stopband attenuation),确定合适的窗口函数②通过过渡带宽度Δω=ωs-ωp=c/N,确定FIR滤波器的长度N③利用,已知Hd(jω),计算理想滤波器的冲激响应此处可利用,或者借助DTFT变换对再利用时移性质得到④,获得所设计的滤波器例:注:(2)中计算出来的N若是小数,向上取整;最后结果若是偶数,α(又可表示为M、n0等)=N/2;若是奇数,α=(N-1/)2,此处α可表示为窗口函数在时域上向右平移的长度十一、DSP算法实现(FFT,Cooley & Tukey)1. 按时间抽取FFT算法(DIT,Decimationintime)基本思想:将N点DFT的计算依次分解为尺寸较小的DFT计算,并利用复数W N kn的周期性和对称性来进行上图为N=8的DIT算法流图,注意第二列的八个节点分别代表了X00(0)、X00(1)、X01(0)、X01(1)、X10(0)、X10(1)、X11(0)、X11(1),第三列的八个节点分别代表了X0(0)、X0(1)、X0(2)、X0(3)、X1(0)、X1(1)、X1(2)、X1(3)计算复杂度:Nlog2N蝶形运算(butterflycomputation)2. 按频率抽取FFT算法(DIF,Decimationinfrequency)。
绪论:本章介绍数字信号处理课程的基本概念。
0.1信号、系统与信号处理1.信号信号是信息的载体。
分类:模拟信号、量化信号、抽样信号和数字信号。
2.系统系统定义为处理(或变换)信号的物理设备,或者说,凡是能将信号加以变换以达到人们要求的各种设备都称为系统。
3.信号处理信号处理即是用系统对信号进行某种加工。
包括:滤波、分析、变换、综合、压缩、估计、识别等等。
所谓“数字信号处理”,就是用数值计算的方法,完成对信号的处理。
通过处理,往往可以达到两个目的:(1)对信号在时域及变换域内的特性进行分析,以便对信号有更清楚的认识。
(2)对信号实施处理,以改善其性能,比如滤波。
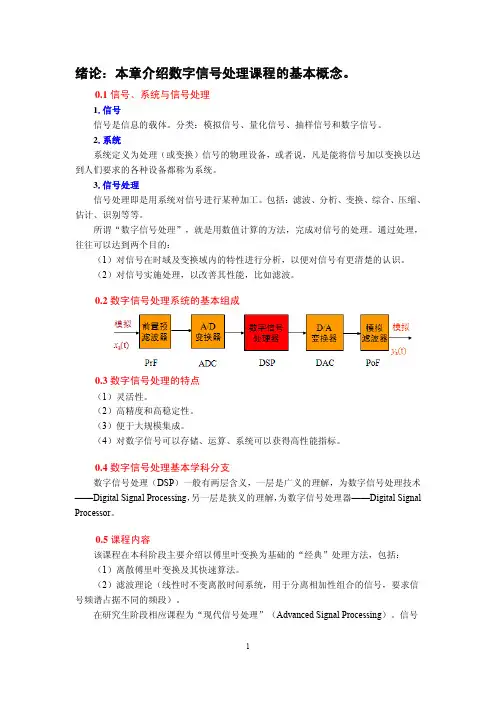
0.2数字信号处理系统的基本组成0.3数字信号处理的特点(1)灵活性。
(2)高精度和高稳定性。
(3)便于大规模集成。
(4)对数字信号可以存储、运算、系统可以获得高性能指标。
0.4数字信号处理基本学科分支数字信号处理(DSP)一般有两层含义,一层是广义的理解,为数字信号处理技术——Digital Signal Processing,另一层是狭义的理解,为数字信号处理器——Digital Signal Processor。
0.5课程内容该课程在本科阶段主要介绍以傅里叶变换为基础的“经典”处理方法,包括: (1)离散傅里叶变换及其快速算法。
(2)滤波理论(线性时不变离散时间系统,用于分离相加性组合的信号,要求信号频谱占据不同的频段)。
在研究生阶段相应课程为“现代信号处理”(Advanced Signal Processing)。
信号对象主要是随机信号,主要内容是自适应滤波(用于分离相加性组合的信号,但频谱占据同一频段)和现代谱估计。
一、重点与难点1.信号及其分类;2.数字信号处理系统的基本组成。
二、具体讲解1.信号及其分类信号是信息的载体,以某种函数的形式传递信息。
这个函数可以是时间域、频率域或其它域,但最基础的域是时域。
分类:周期信号/非周期信号确定信号/随机信号能量信号/功率信号连续时间信号/离散时间信号/数字信号按自变量与函数值的取值形式不同分类:2.数字信号处理系统的基本组成数字信号处理就是用数值计算的方法对信号进行变换和处理。
数字信号处理复习总结如果系统函数的分母中除a0外,还有其它的ak不为零,则相应的h(n)将是无限长序列,称这种系统为无限长单位脉冲响应(IIR,InfiniteImpulseResponse)系统。
(2)低通、高通、带通、带阻滤波器注意:数字滤波器(DF)与模拟滤波器(AF)的区别数字滤波器的频率响应都是以2π为周期的,滤波器的低通频带处于2π的整数倍处,而高频频带处于π的奇数倍附近。
2.设计指标描述滤波器的指标通常在频域给出。
数字滤波器的频率响应一般为复函数,通常表示为其中,称为幅频响应,称为相频响应。
对IIR数字滤波器,通常用幅频响应来描述设计指标,而对于线性相位特性的滤波器,一般用FIR滤波器设计实现。
IIR低通滤波器指标描述:——通带截止频率,——阻带截止频率,——通带最大衰减,——阻带最小衰减,——3dB通带截止频率3.设计方法(重点)三步:(1)按照实际需要确定滤波器的性能要求。
(2)用一个因果稳定的系统函数去逼近这个性能要求。
(3)用一个有限精度的算法去实现这个系统函数。
IIR滤波器常借助模拟滤波器理论来设计数字滤波器,(重点)设计步骤为:先根据所给的滤波器性能指标设计出相应的模拟滤波器传递函数Ha(s)( butterworth滤波器设计法等,有封闭公式利用),然后由Ha(s)经变换(脉冲响应不变法或者双线性变换法等)得到所需的数字滤波器的系统函数H(z)。
在变换中,一般要求所得到的数字滤波器频率响应应保留原模拟滤波器频率响应的主要特性。
为此要求:(重点)(1)因果稳定的模拟滤波器必须变成因果稳定的数字滤波器;(2)数字滤波器的频响应模仿模拟滤波器的频响。
6.2 脉冲响应不变法、双线性不变法设计IIR数字低通滤波器设计数字滤波器可以按照技术要求先设计一个模拟低通滤波器,得到模拟低通滤波器的传输函数,再按一定的转换关系将转换成数字低通滤波器的系统函数。
其设计流程如图所示6.1所示。

数字信号处理期末复习一、填空、选择、判断:1. 一线性时不变系统,输入为 x (n )时,输出为y (n );则输入为2x (n )时,输出为 2y(n) ;输入为x (n-3)时,输出为 y(n-3) 。
2. 线性时不变系统离散时间因果系统的系统函数为252)1(8)(22++--=z z z z z H ,则系统的极点为 2,2121-=-=z z ;系统的稳定性为不稳定。
3. 对模拟信号(一维信号,是时间的函数)进行采样后,就是时域离散信信号,再进行幅度量化后就是数字信号。
4. 单位脉冲响应不变法缺点频谱混迭,适合____低通带通滤波器设计,但不适合高通带阻滤波器设计。
5. 请写出三种常用低通原型模拟滤波器特沃什滤波器、切比雪夫滤波器、椭圆滤波器。
6. FIR 数字滤波器的单位取样响应为h(n), 0≤n≤N -1, 则其系统函数 H(z)的极点在 z=0 是 N-1 阶的。
7. 对于N 点(N =2L )的按时间抽取的基2FFT 算法,共需要作2/NlbN 次复数乘和 _NlbN 次复数加。
8. 从奈奎斯特采样定理得出,要使实信号采样后能够不失真还原,采样频率fs与信号最高频率f max 关系为: fs>=2f max 。
9. 已知一个长度为N 的序列x(n),它的离散时间傅立叶变换为X (e jw ),它的N 点离散傅立叶变换X (K )是关于X (e jw )的 N 点等间隔采样。
10. 有限长序列x(n)的8点DFT 为X (K ),则X (K )=()70()nk N n X k x n W ==∑。
11. 用脉冲响应不变法进行IIR 数字滤波器的设计,它的主要缺点是频谱的交叠所产生的现象。
12. 若数字滤波器的单位脉冲响应h (n )是奇对称的,长度为N ,则它的对称中心是 (N-1)/2 。
13. 用窗函数法设计FIR 数字滤波器时,加矩形窗比加三角窗时,所设计出的滤波器的过渡带比较窄,阻带衰减比较小。
1、对模拟信号(一维信号,是时间的函数)进行采样后,就是 离散 信号,再进行幅度量化后就是 数字信号。
2、若线性时不变系统是有因果性,则该系统的单位取样响应序列h(n)应满足的充分必要条件是 当n<0时,h(n)=0 。
3、序列)(n x 的N 点DFT 是)(n x 的Z 变换在 单位圆 的N 点等间隔采样。
4、)()(5241n R x n R x ==,只有当循环卷积长度L ≥8 时,二者的循环卷积等于线性卷积。
5、已知系统的单位抽样响应为h(n),则系统稳定的充要条件是()n h n ∞=-∞<∞∑6、用来计算N =16点DFT ,直接计算需要(N 2)16*16=256_次复乘法,采用基2FFT 算法,需要__(N/2 )×log 2N =8×4=32 次复乘法。
7、无限长单位冲激响应(IIR )滤波器的基本结构有直接Ⅰ型,直接Ⅱ型,_级联型_和 并联型_四种。
8、IIR 系统的系统函数为)(z H ,分别用直接型,级联型,并联型结构实现,其中 并联型的运算速度最高。
9、数字信号处理的三种基本运算是:延时、乘法、加法10、两个有限长序列 和 长度分别是 和 ,在做线性卷积后结果长度是__N 1+N 2-1_。
11、N=2M 点基2FFT ,共有 M 列蝶形,每列有N/2 个蝶形。
12、线性相位FIR 滤波器的零点分布特点是 互为倒数的共轭对 13、数字信号处理的三种基本运算是: 延时、乘法、加法14、在利用窗函数法设计FIR 滤波器时,窗函数的窗谱性能指标中最重要的是___过渡带宽___与__阻带最小衰减__。
16、_脉冲响应不变法_设计IIR 滤波器不会产生畸变。
17、用窗口法设计FIR 滤波器时影响滤波器幅频特性质量的主要原因是主瓣使数字滤波器存在过渡带,旁瓣使数字滤波器存在波动,减少阻带衰减。
18、单位脉冲响应分别为 和 的两线性系统相串联,其等效系统函数时域及频域表达式分别是h(n)=h 1(n)*h 2(n), =H 1(e j ω)×H 2(e j ω)。
数字信号处理复习资料第一章 时域离散信号和时域离散系统 一、常用的典型序列 1. 单位采样序列δ(n )单位采样序列也称为单位脉冲序列,特点是仅在n =0时取值为1,其它均为零。
它类似于模拟信号和系统中的单位冲激函数δ(t ),但不同的是δ(t )在t =0时,取值无穷大,t ≠0 时取值为零,对时间t 的积分为1。
单位采样序列和单位冲激信号如图1.2.2所示。
图1.2.2(a)单位采样序列; (b)单位冲激信号2. 单位阶跃序列u (n ) 单位阶跃序列如图1.2.3所示。
它类似于模拟信号中的单位阶跃函数u (t )。
δ(n )与u (n )之间的关系如下列式所示:图1.2.3 单位阶跃序列 3. 矩形序列R N (n )式中,N 称为矩形序列的长度。
当N =4时,R 4(n )的波形如图1.2.4所示。
矩形序列可用单位图1.2.4 矩形序列*4. 实指数序列x (n )=a n u (n )a⎩⎨⎧≠==0 001)(n n nδnt( a )( b )⎩⎨⎧<≥=0 001)(n n n u )1()()(--=n u n u n δ∑∞=-=0)()(k k n n uδn ⎩⎨⎧-≤≤=nN n n R N 其它 010 1)()()()(N n u n u n R N--=n n x )j (0e)(ωσ+=如果|a |<1, x (n )的幅度随n 的增大而减小,称x (n )为收敛序列;如果|a |>1,则称为发散序列。
其波形如图1.2.5所示。
图1.2.5 实指数序列*5.正弦序列式中, 称为正弦序列的数字域频率(也称数字频率),单位是弧度(rad),它表示序列变化*6. 复指数序列复指数序列用下式表示:式中, ω0为数字域频率。
二、线性时不变系统的判断(计算题) 1、系统的输入、输出之间满足线性叠加原理的系统称为线性系统。
设x 1(n )和x 2(n )分别作为系统的输入序列,其输出分别用y 1(n )和y 2(n )表示,即那么线性系统一定满足下面两个公式:可加性 比例性或齐次性 式中a 是常数。
1、线性时不变因果稳定系统的定义、判断,包括时域()h n 、Z 域判断方法()H z 的判别。
例题:一线性时不变系统,输入为()x n 时,输出为()y n ,则输入为()ax n b -时,输出为 。
设系统的单位抽样响应为()h n ,则系统因果的充要条件为0n >时,()0h n ≠ ()H z 的极点应该要位于单位圆内部,收敛区间在右半平面。
2、奈奎斯特采样定理:要使实信号采样后能够不失真还原,2s c f f ≥,此时要综合判断。
如23()2(cos1000)3(sin1500)x n t t ππ=+的最低采样频率f 为: Hz 。
该信号经过10kHz 的频率调制以后,最低采样频率为3、数字频率、模拟频率关系 s T ω=Ω,)(Ωj H 向)(ωj H 的转变。
4、线性常系数差分方程的求解,系统的状态变量分析,系统的信号流图表示 求解方法:时域直接求解(比较复杂),Z 变换求解。
输入—输出的系统方程向状态变量分析方法的转换由差分方程()5(1)6(2)2()(1)y n y n y n x n x n ----=+-表示的离散系统。
求(1)该系统所对应的系统函数)(z H 和系统的单位冲击响应)(n h 。
(2)如果系统的输入4n x n u n =()(),其初始状态为2113y y -=-=-(),(),求系统的零状态响应zs y n ()和零输入响应zi y n()。
(3) 画出该系统对应的直接型、级联型和并联型信号流图,并给出对应形式下系统的状态方程和输出方程。
(4) 利用所求出的系数矩阵A B C D 、、、,求出系统函数)(z H ,并进行验证 5、Z 变换和逆Z 变换,Z 变换和拉氏变换、离散序列的傅里叶变换(DFS )、离散傅里叶变换(DFT)的关系,基本信号的Z 变换,Z 变换的基本性质及其应用收敛区间与序列性质的关系。
序列的傅立叶变换与其Z 变换的关系:傅立叶变换是单位圆上的Z 变换;DFT 是对DFS 的频域等间隔采样。
数字信号处理复习(适合期末考试)1如果信号的自变量和函数值都取连续值,则称这种信号为模拟信号或者称为时域连续信号,例如语言信号、温度信号等;2如果自变量取离散值,而函数值取连续值,则称这种信号称为时域离散信号,这种信号通常来源于对模拟信号的采样;3如果信号的自变量和函数值均取离散值,则称为数字信号。
4数字信号是幅度量化了的时域离散信号。
5如果系统n 时刻的输出只取决于n 时刻以及n 时刻以前的输入序列,而和n 时刻以后的输入序列无关,则称该系统为因果系统。
6线性时不变系统具有因果性的充分必要条件是系统的单位脉冲响应满足下式:________。
7序列x (n )的傅里叶变换X (e j ω)的傅里叶反变换为:x (n )=IFT[X (e j ω)]=————————8序列x (n )的傅里叶变换X (e j ω)是频率的ω的周期函数,周期是2π。
这一特点不同于模拟信号的傅里叶变换。
9序列x (n )分成实部与虚部两部分,实部对应的傅里叶变换具有共轭对称性,虚部和j 一起对应的傅里叶变换具有共轭反对称性。
10序列x (n )的共轭对称部分x e (n )对应着X (e j ω)的实部X R (e j ω),而序列x (n )的共轭反对称部分x o (n )对应着X (e j ω)的虚部(包括j)。
11时域离散信号的频谱也是模拟信号的频谱周期性延拓,周期为TF s s ππ22==Ω,因此由模拟信号进行采样得到时域离散信号时,同样要满足采样定理,采样频率必须大于等于模拟信号最高频率的2倍以上,否则也会差生频域混叠现象,频率混叠在Ωs/2附近最严重,在数字域则是在π附近最严重。
12因果(可实现)系统其单位脉冲响应h (n )一定是因果序列,那么其系统函数H (z )的收敛域一定包含∞点,即∞点不是极点,极点分布在某个圆内,收敛域在某个圆外。
13系统函数H (z )的极点位置主要影响频响的峰值位置及尖锐程度,零点位置主要影响频响的谷点位置及形状。
《数字信号处理》复习提纲绪论1.数字信号的概念;2.数字信号与模拟信号的优缺点比较。
第1章 时域离散信号和时域离散系统 1.时域离散信号(序列)的三种表示方法。
2.七种常用典型序列。
3.单位采样序列、矩形序列与单位阶跃序列之间的关系(公式表示)。
4.信号分析中一个很有用的公式:对于任意序列)(n x ,可以用单位采样序列的移位加权和表示,即∑∞-∞=-=m m n m x n x )()()(δ5.序列的运算有:加法、乘法、移位、翻转、尺度变换。
其中 对于移位序列)(0n n x -,00>n 时,称为)(n x 的延时序列,0<n 时,称为)(n x 的超前序列。
关于尺度变换,)(mn x 是)(n x 序列每隔m 点取一点形成的序列,相当于n 轴的尺度变换。
6.线性系统和时不变系统的判定依据。
7.线性卷积运算公式:∑∞-∞=-==m m n h m x n h n x n y )()()(*)()(8.计算线性卷积的基本运算有翻转、移位、相乘、相加。
(例题1.3.4) 9.如果两个序列的长度分别为N 和M ,那么线性卷积的长度为1-+M N 。
10.线性卷积的两个重要公式:(1)序列)(n x 与单位脉冲序列的线性卷席等于序列本身)(n x :∑∞-∞==-=m n n x m n m x n x )(*)()()()(δδ(2)如果序列与一个移位的单位脉冲序列)(0n n -δ进行线性卷积,就相当于将序列本身移位0n ,如下式:)()(*)(00n n x n n n x -=-δ11.线性时不变系统具有因果性的充分必要条件是系统的脉冲响应满足公式:00)(<=n n h12.系统稳定的充分必要条件是系统的单位脉冲响应绝对可和,公式为:∞<∑∞-∞=n n h )(13.采样定理:采样信号的频率大于等于原信号最高频率的两倍,即满足c sf f 2≥,则采样信号能够恢复原信号而无混叠现象。