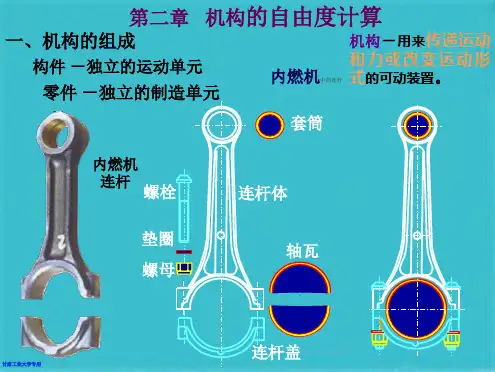
§2-5 机构自由度计算
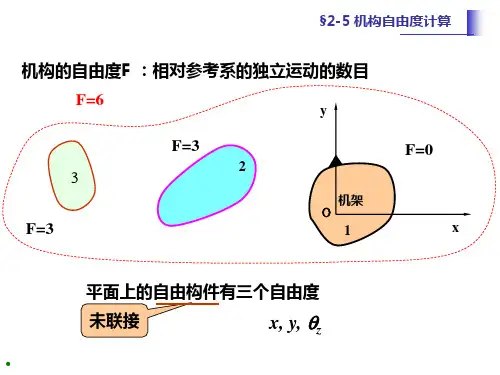
机构的自由度F :相对参考系的独立运动的数目
F=6
F=3 3 F=3
2
y
F=0
机架
O
1
x
平面上的自由构件有三个自由度
未联接
x, y, z
.
机构自由度计算
用转动副与机架连接后剩一个自由度
n=2 pl=3 ph =0
平面低副引入2个约束 平面高副引入1个约束
y
F=2 F=4 F=1 F=3 机构自由度计算公式 F=3n - (2pl + ph ) 活动构件数:n 低副数: pl 高副数: ph
自由度计算注意事项
n=9 pl =11 ph =3 F’=2 p’=1
点划线
作业:2-16 (a)(b)(c)
.
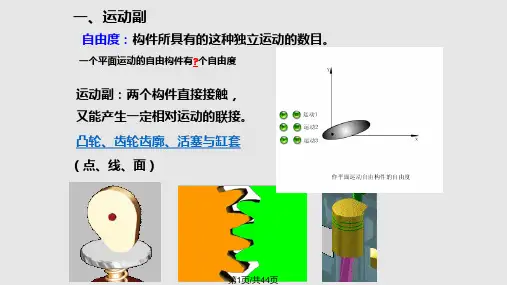
平面机构的组成原理
研究低副机构
F=3n - 2pl
F=1
平面机构的组成原理
n=5 pl =7 F=1
n=2 pl =3 F=0
基本杆组:不可再分的自由度为0的用运动副连接的构件系统 机构由基本杆组联接于原动件和机架上而构成 n=2 , pl =3 F=3n - 2pl =0 n=3 , 无解 n=4 , pl =6 ……
3 1
n=3 pl =3 ph =1 F=2? n=7 pl =6? ph =0 F=9?
2
3 2 1
pl =10
F=1
.
3、虚约束 运动副引入了重复的约束
两构件之间存在多个 *导路互相平行的移动副 *轴线重合的转动副 *法线重合的高副 *不影响机构运动传递的重复部分
自由度计算注意事项
算 一 个 移 动 副
.
例
例:手动冲床 F=3*2-(2*3+0)=0