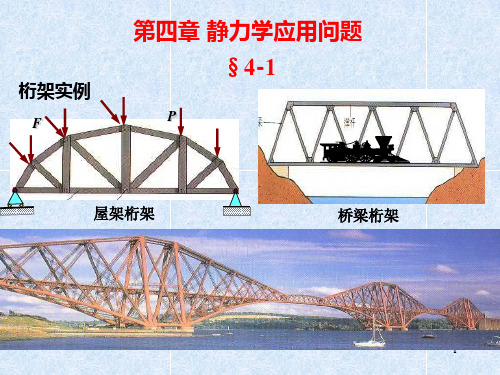
同济大学 理论力学 孙杰 第四章 静力学应用问题
- 格式:ppt
- 大小:2.88 MB
- 文档页数:40


4-1解:1.选定由杆OA ,O 1C ,DE 组成的系统为研究对象,该系统具有理想约束。
作用在系统上的主动力为M F F ,。
2.该系统的位置可通过杆OA 与水平方向的夹角θ完全确定,有一个自由度。
选参数θ为广义坐标。
3.在图示位置,不破坏约束的前提下,假定杆OA 有一个微小的转角δθ,相应的各点的虚位移如下: δθδ⋅=A O r A ,δθδ⋅=B O r B ,δθδ⋅=C O r C 1δθδ⋅=D O r D 1,C B r r δδ=,E D r r δδ=代入可得:E Ar r δδ30=4.由虚位移原理0)(=∑i F W δ有:0)30(=⋅-=⋅-⋅E M E M A r F F r F r F δδδ对任意0≠E r δ有:F F M 30=,物体所受的挤压力的方向竖直向下。
4-4解:4a1.选杆AB 为研究对象,该系统具有理想约束。
设杆重为P,作用在杆上的主动力为重力。
2.该系统的位置可通过杆AB 与z 轴的夹角θ完全确定,有一个自由度。
选参数θ为广义坐标。
由几何关系可知:θtan a h =杆的质心坐标可表示为:θθcos 2tan ⋅-=la z C3.在平衡位置,不破坏约束的前提下,假定杆AB 逆时针旋转一个微小的角度 δθ,则质心C 的虚位移:δθθδθθδ⋅+-=si n 2si n 2la z C 4.由虚位移原理0)(=∑i F W δ有:0)si n 2si n (2=+-⋅-=⋅-δθθθδla P z P C 对任意0≠δθ有:0si n 2si n 2=+-θθl a 即杆AB 平衡时:31)2arcsin(la =θ。
解:4b1.选杆AB 为研究对象,该系统具有理想约束。
设杆重为P,作用在杆上的主动力为重力。
2.该系统的位置可通过杆AB 与z 轴的夹角θ完全确定,有一个自由度。
选参数θ为广义坐标。
由几何关系可知:θsi n R z A=杆的质心坐标可表示为:θθcos 2si n ⋅-=lR z C3.在平衡位置,不破坏约束的前提下,假定杆AB 顺时针旋转一个微小的角度 δθ,则质心C 的虚位移:δθθδθθθδ⋅+⋅-=si n 2cos si n 2lR z C 4.由虚位移原理0)(=∑i F W δ有:0)si n 2cos si n (2=+-⋅-=⋅-δθθθθδlR P z P C 对任意0≠δθ有:0si n 2cos si n 2=+-θθθl R 即平衡时θ角满足:0si n cos 23=-θθl R 。

第四章 力系的简化习题解[习题4-1] 试用节点法计算图示杵桁架各杆的内力。
解:(1)以整体为研究对象,其受力图如图所示。
由结构的对称性可知, kN R R B A 4==(2)以节点A 为研究对象,其受力图如图所示。
因为节点A 平衡,所以0=∑iyF0460sin 0=+AD N)(62.4866.0/4kN N AD -=-=0=∑ixF060cos 0=+AD AC N N)(31.25.062.460cos 0kN N N AD AC =⨯=-= (3)以节点D 为研究对象,其受力图如图所示。
因为节点D 平衡,所以 0=∑iyF0430cos 30cos 0'0=---AD D C N N 0866.0/4=++AD D C N N 0866.0/4866.0/4=+-D C N0=DC N0=∑ixF030sin 30sin 0'0=-+AD D C D E N N N 05.062.4=⨯+DE NkN4)(akN4AB RkN 2AC23N A )(31.2kN N DE -=(4)根据对称性可写出其它杆件的内力如图所示。
[习题4-2] 用截面法求图示桁架指定杆件 的内力。
解:(a)(1)求支座反力以整体为研究对象,其受力图如图所示。
由对称性可知,kN R R B A 12==(2)截取左半部分为研究对象,其受力图 如图所示。
因为左半部分平衡,所以0)(=∑i CF M0612422843=⨯-⨯+⨯+⨯N 063243=⨯-++N )(123kN N =kN2AC23N A0=∑ixF0cos cos 321=++N N N αθ01252252421=+⋅+⋅N N012515221=+⋅+⋅N N0512221=++N N ……..(1) 0=∑iyF02812sin sin 21=--++αθN N025*******=+⋅+⋅N N02525121=+⋅+⋅N N052221=++N N0544221=++N N ……..(2) 05832=-N)(963.53/582kN N ==)(399.1652963.5252221kN N N -=-⨯-=--=解:(b )截取上半部分为研究对象,其受力图如图所示。
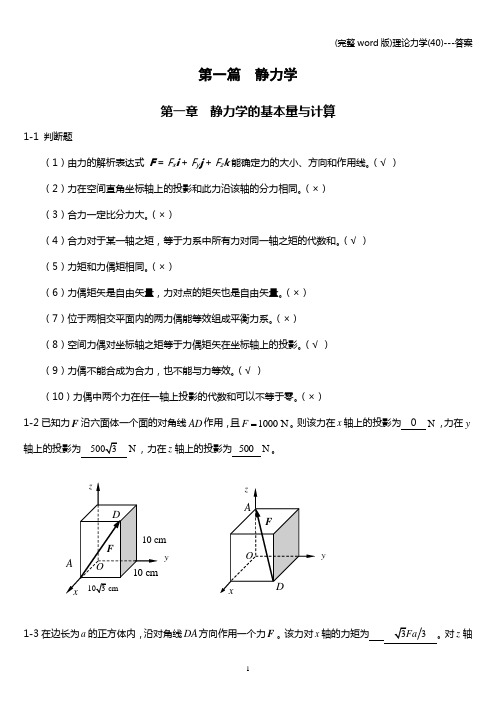
第一篇 静力学第一章 静力学的基本量与计算1-1 判断题(1)由力的解析表达式 F = F x i + F y j + F z k 能确定力的大小、方向和作用线。
(√) (2)力在空间直角坐标轴上的投影和此力沿该轴的分力相同。
(×) (3)合力一定比分力大。
(×)(4)合力对于某一轴之矩,等于力系中所有力对同一轴之矩的代数和。
(√) (5)力矩和力偶矩相同。
(×)(6)力偶矩矢是自由矢量,力对点的矩矢也是自由矢量。
(×) (7)位于两相交平面内的两力偶能等效组成平衡力系。
(×) (8)空间力偶对坐标轴之矩等于力偶矩矢在坐标轴上的投影。
(√) (9)力偶不能合成为合力,也不能与力等效。
(√)(10)力偶中两个力在任一轴上投影的代数和可以不等于零。
(×)1-2已知力F 沿六面体一个面的对角线AD 作用,且1000 N F 。
则该力在x 轴上的投影为 0 N ,力在y轴上的投影为N ,力在z 轴上的投影为 500 N 。
1-3在边长为a 的正方体内,沿对角线DA 方向作用一个力F 。
该力对x对z 轴yy的力矩 0 。
对O点力矩大小为 3 。
1-4水平圆盘的半径为r ,外缘C 处作用有已知力F 。
力F 位于圆盘C 处的切平面内,且与C 处圆盘切线夹角为o 60,尺寸如图所示。
求力F 对x ,y ,z解:力F 的作用点C 的坐标为(,,)22r r h 力F沿三个坐标轴的投影为:00cos 60sin 60x F F ==001cos60cos604y F F F =-=-0sin 602z F F F =-=-则有:1()()(3)44x z y F M yF zF F h F h r =-=⋅-⋅-=- ())2y x z r M zF xF h F F r h =-=-⋅=+1()242z y x r FrM xF yF F F =-=⋅-=-1-5 已知:100N F =,o 30α=,o 60β=,求力F 在x ,y ,z 轴上的投影以及力F 对x ,y ,z 轴之矩。

静力学第四章虚位移原理本章介绍的虚位移原理是分析静力学的理论基础,它应用功的概念建立任意质点系平衡的充要条件,是解决质点系平衡问题的最一般的原理。
虚位移原理是研究静力学问题的另一途径。
对于具有理想约束的物体系统,由于未知的约束反力不作功,应用虚位移原理求解常比列平衡方程更方便。
例如,图4-1所示的曲柄连杆机构,当要求作用在曲柄上的主动力矩M与作用在滑块上的主动力F之间的平衡关系时,用几何静力学求解,则需要分别取出曲柄、滑块为研究对象,列出平衡方程,联立求解,得到主动力之间的平衡关系,显然是十分繁琐的。
而应用虚位移原理求解系统的平衡问题时,在所列的方程中,将不出现约束反力,联立方程的数目也将减少,因而可使运算简化。
图4-1第一节虚位移与虚功的概念一、虚位移质点系内的质点,由于受到约束,它们的运动不可能是完全自由的,例如图4-2所示曲柄连杆机构,质点A只能在半径为r的圆周上运动,滑块B只能沿滑道运动,杆AB 长度不变,这样的质点系称为非自由质点系,为分析问题方便,这里把限制非自由质点系运动的条件称为约束。
图4-2在静止平衡问题中,质点系中各个质点都不动,我们设想在某质点约束允许的条件下,给其一个任意的、极其微小的位移。
在图4-2中,可设想曲柄在平衡位置上转过任一微小角度,这时A点沿圆弧切线方向有相应的位移,点B沿导轨方向有相应的位移,这些位移都是约束所允许的极微小的位移。
在某瞬时,质点系在约束允许的条件下,可能实现的任何无限小的位移称为虚位移或可能位移。
虚位移可以是线位移,也可以是角位移,虚位移用符号δ表示,以区别于实位移,如等。
必须注意,虚位移和实位移虽然都是约束所容许的位移,但二者是有区别的。
实位移是在一定的力的作用和已知的初始条件下,在一定的时间内发生的位移,具有确定的方向。
而虚位移则纯粹是一个几何概念,它既不牵涉到系统的实际运动,也不牵涉到力的作用,与时间过程和初始条件无关,在不破坏系统约束的条件下,它具有任意性。