霍尔位置传感器测杨氏模量
- 格式:ppt
- 大小:134.00 KB
- 文档页数:9
霍耳位置传感器法测杨氏模量一、实验目的1.了解和掌握微小位移量的非电量电测方法。
2.弯曲法测黄铜的杨氏模量。
3.对霍耳传感器进行定标,测量可锻铸铁的杨氏模量。
二、实验仪器FD-HY-I 型霍耳位置传感器测杨氏模量装置,霍耳位置传感器输出信号测量仪。
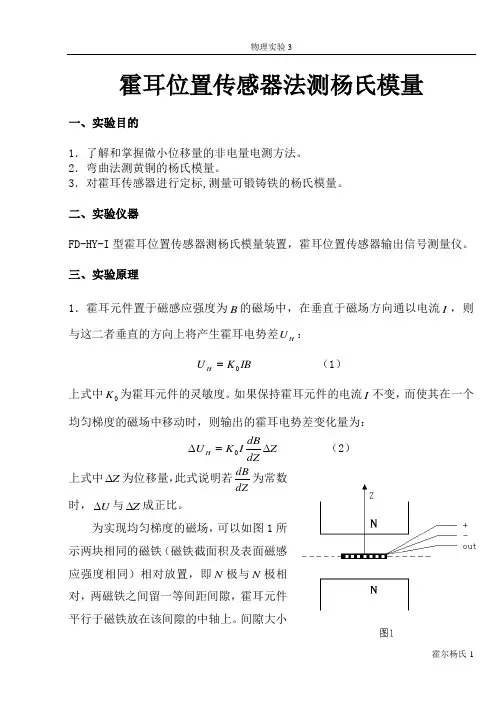
三、实验原理1.霍耳元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者垂直的方向上将产生霍耳电势差H U :IB K U H 0= (1)上式中0K 为霍耳元件的灵敏度。
如果保持霍耳元件的电流I 不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍耳电势差变化量为:Z dZ dBIK U H ∆=∆0 (2) 上式中Z ∆为位移量,此式说明若dZdB为常数时,U ∆与Z ∆成正比。
为实现均匀梯度的磁场,可以如图1所示两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即N 极与N 极相对,两磁铁之间留一等间距间隙,霍耳元件平行于磁铁放在该间隙的中轴上。
间隙大小要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。
磁铁截面要远大于霍耳元件,以尽可能的减小边缘效应影响,提高测量精确度。
若磁铁间隙内中心截面处的磁感应强度为零,霍耳元件处于该处时,输出的霍耳电势差应该为零。
当霍耳元件偏离中心沿Z 轴发生位移时,由于磁感应强度不再为零,霍耳元件也就产生相应的电势差输出,其大小可以用数字电压表测量。
由此可以将霍耳电势差为零的元件所处的位置作为位移参考零点0Z 。
霍耳电势差与位移量之间存在一一对应关系,当位移较小(< 2mm ),这一一对应关系具有良好的线性(即Z K U ∆⋅=,)0Z Z Z i -=∆)。
2.在横梁弯曲的情况下,杨氏模量E 可以用下式表示:Zb a Mgd E ∆334= (3)其中:d 为两刀口之间的距离;M 为所加砝码的质量;a 为梁的厚度;b 为梁的宽度;Z ∆为梁中心由于外力作用而下降的距离;g 为重力加速度。
用霍尔位置传感器测杨氏模量用霍尔位置传感器测量材料的杨氏模量利用霍尔位置传感器和弯曲法测量杨氏模量实验数据杨氏模量测量实验报告随着科技进步的蓬勃发展,微位移测量这一核心技术也日趋先进。
本次测试揭示了业界近年开发的先进霍尔位置传感器。
它通过电磁铁和集成霍尔元件之间不断变化的负载信号来测量微小的偏转。
这种控制技术主要用于杨氏弯曲法。
杨氏模量测试。
在此实验室报告中,模具的杨氏模量是使用霍尔位置传感器测量的。
合金铸铁的杨氏模量采用弯曲法测定。
除了测量铜的杨氏模量外,还要校准霍尔位置传感器以解决其精度问题。
利用霍尔位置传感器测量铁的杨氏模量等。
利用实验可以使学生增强对霍尔传感器基本原理的广泛应用、科学院新型传感器的标定、以及不同长度值的测量方法。
传感器法测量位移有什么优点霍尔位置传感器和弯曲法测量杨氏模量实验数据弯曲法测量杨氏模量实验中的主要测量值有哪些。
请计算每个环境因素的不确定性。
传感器测量位移的方法有什么特点?建议】使用千分尺时,2.使用高度计光学测量重物刀口架基线位置时,刀口架不能晃动。
4.使用霍尔位置霍尔传感器及弯曲法杨氏模量测量实验报告方法本实验在弯曲法良好基础上安装霍尔位置测量杨氏模量液态金属材料的模量。
传感器。
通过对霍尔位置传感器的输入阻抗与位移的微分关系的标定和微小位移的测量,使学生了解和掌握微小位移的非电测量新方法。
微位移测量技术也得到快速发展霍尔位置传感器标定及弯曲法测量杨氏模量误差分析SUES大学物理选修实验讲座笔记磁弯曲法测量杨氏模量及霍尔位置传感器校准随着科技进步的蓬勃发展,微挠度测量的电子技术也给经济带来了飞速的发展。
本科学实验介绍了近年来出现的新型先进霍尔位置传感器,利用负载的回波来测量电磁铁与霍尔传感器之间位置变化的微小偏移量。
该科学实验结合了电子技术测量金属梁的微小位移、霍尔位置传感器的校准和弯曲法测量铝的杨氏模量。
通过实验报告,小学生可以加深对霍尔传感器广泛应用的认识,学习新型传感器的标定、不同取值宽度的测量和不同宽度测量设备的采用。
实验6 霍尔传感器测杨氏模量杨氏模量是描述固体材料抵抗形变能力的重要物理量,在工程上作为选择材料的依据之一,是工程技术中常用的参数。
利用霍尔位置传感器测量微小位移,可以改进传统粱弯曲法实验中的测量方法,使古老的实验又增添新的技术内容。
而霍尔元件及集成霍尔传感器具有尺寸小、外围电路简单、频响宽、使用寿命长,特别是抗干扰能力强等特点,近年来被广泛应用于物理量的测量、自动控制及信息处理等领域。
【实验目的】1.了解霍尔位置传感器的结构原理、特性及使用方法。
2.学习掌握粱弯曲法测量金属板的杨氏弹性模量。
3.学会确定灵敏度的方法,并确定仪器的灵敏度。
4.掌握逐差法处理数据。
【实验仪器】霍尔位置传感器、霍尔位置传感器输出信号测量仪、游标卡尺、螺旋测微器。
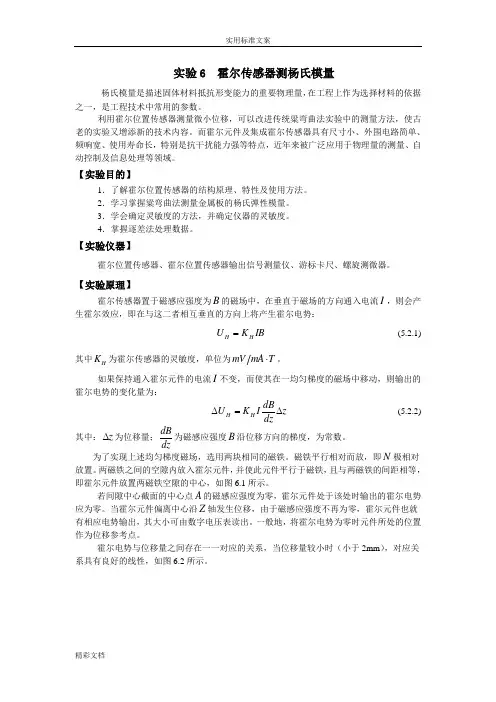
【实验原理】霍尔传感器置于磁感应强度为B 的磁场中,在垂直于磁场的方向通入电流I ,则会产生霍尔效应,即在与这二者相互垂直的方向上将产生霍尔电势:IB K U H H = (5.2.1)其中H K 为霍尔传感器的灵敏度,单位为T mA mV ⋅。
如果保持通入霍尔元件的电流I 不变,而使其在一均匀梯度的磁场中移动,则输出的霍尔电势的变化量为:z dzdBIK U H H ∆=∆ (5.2.2) 其中:z ∆为位移量;dzdB为磁感应强度B 沿位移方向的梯度,为常数。
为了实现上述均匀梯度磁场,选用两块相同的磁铁。
磁铁平行相对而放,即N 极相对放置。
两磁铁之间的空隙内放入霍尔元件,并使此元件平行于磁铁,且与两磁铁的间距相等,即霍尔元件放置两磁铁空隙的中心,如图6.1所示。
若间隙中心截面的中心点A 的磁感应强度为零,霍尔元件处于该处时输出的霍尔电势应为零。
当霍尔元件偏离中心沿Z 轴发生位移,由于磁感应强度不再为零,霍尔元件也就有相应电势输出,其大小可由数字电压表读出。
一般地,将霍尔电势为零时元件所处的位置作为位移参考点。
霍尔电势与位移量之间存在一一对应的关系,当位移量较小时(小于2mm ),对应关系具有良好的线性,如图6.2所示。
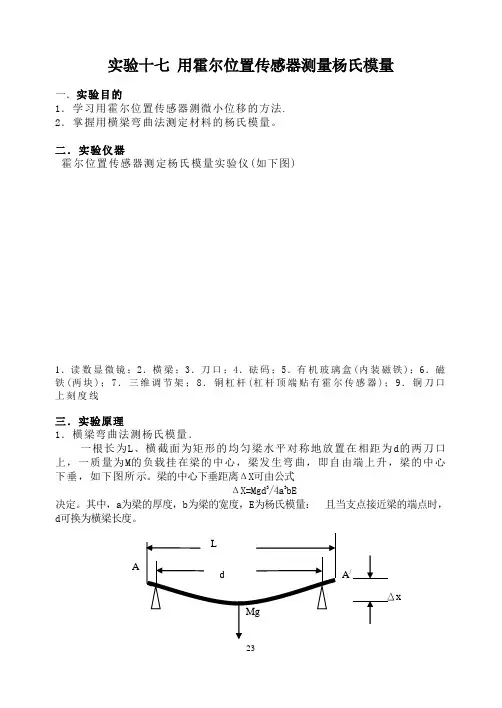
实验十七 用霍尔位置传感器测量杨氏模量一.实验目的1.学习用霍尔位置传感器测微小位移的方法.2.掌握用横梁弯曲法测定材料的杨氏模量。
二.实验仪器霍尔位置传感器测定杨氏模量实验仪(如下图)1.读数显微镜;2.横梁;3.刀口;4.砝码;5.有机玻璃盒(内装磁铁);6.磁铁(两块);7.三维调节架;8.铜杠杆(杠杆顶端贴有霍尔传感器);9.铜刀口上刻度线三.实验原理1.横梁弯曲法测杨氏模量.一根长为L 、横截面为矩形的均匀梁水平对称地放置在相距为d 的两刀口上,一质量为M 的负载挂在梁的中心,梁发生弯曲,即自由端上升,梁的中心下垂,如下图所示。
梁的中心下垂距离ΔX 可由公式ΔX=Mgd 3/4a 3bE决定。
其中,a 为梁的厚度,b 为梁的宽度,E 为杨氏模量: 且当支点接近梁的端点时,d 可换为横梁长度。
A A x对上式变形得:E=Mgd3/4a3bΔX只要确定等式右方各相关量的量值,就可计算出E的值。
2.霍尔式微量位移传感器原理简介由霍尔效应可知,当激励电流恒定时,霍尔电压V H与磁感应强度B成正比,若磁感应强度B是位置X的函数,则霍尔电压的大小就可以用来反映霍尔元件的位置。
当霍尔元件在磁场中移动时,其输出的霍尔电压V H的变化就反映了霍尔元件的位移量ΔX。
霍尔式微量位移传感器的灵敏度高,但它能检测的位移量较小,适合于微小位移量及机械振动的测量:还可进行压力或压差、加速度的测量。
四.实验内容及步骤1.按图调节仪器,并连线。
2.对霍尔传感器输出电压U定标。
仪器调节好后,逐一加上砝码(20g/次)使梁弯曲产生位移ΔX,精确测量传感器信号端输出电压U与位置X的关系(X为读数显微镜的读数),至少记录6个点。
可以看到,U—X有着良好的线性关系。
仔细取放砝码,注意不要使中间刀口移位,这通常是主要的误差来源.2.测量黄铜或可锻铸铁的杨氏模量,并与标准值比较求相对误差。
ΔX要求用逐差法处理:d用米尺测量,b用游标卡尺测量,a用千分尺测量。
霍尔位置传感器法杨氏模量的测定1.拉伸法测量杨氏模量
◆原理:本实验采用光杠杆放大法进行测量。
弹性杨氏模量是反映材料形变与内应力关系的物理量,实验表明,在弹性范围内,正应力(单位横截面积上垂直作用力与横截面积之比,)与线应变(物体的相对伸长)成正比,即
这个规律称为虎克定律。
式中的比例系数称为杨氏模量,单位N/m2。
◆提问:一个不规则形状的刚性材料,应该如何测量其杨氏模量?
◆提问:拉伸法测量杨氏模量,除了用光杠杆法测量钢丝的微小伸长量之外,还需要什么测量工具?
◆公式:,式中叫做光杠杆的放大倍数。
2.测量圆环的转动惯量
◆结构:三线摆是上、下两个匀质圆盘,通过三条等长的摆线(摆线为不易拉伸的细线)连接而成。
◆原理:三线摆的摆动周期与摆盘的转动惯量有一定关系,所以把待测样品放在摆盘上后,三线摆系统的摆动周期就要相应地随之改变。
这样,根据摆动周期、摆盘质量以及有关的参量,就能求出摆动系统的转动惯量。
◆公式:
◆学生在实验过程中容易出现的问题:
1.三线摆、扭摆没有调水平;
2.测量转动惯量时摆角大于5度;
3.光电门的摆放位置不是在三线摆、扭摆的摆动时平衡位置附近;
4.在拉伸法测量杨氏模量实验中,学生误将望远镜的读数看成是钢丝的伸长量。
用霍尔位置传感器测杨氏模量实验报告实验报告:用霍尔位置传感器测杨氏模量摘要:本实验通过使用霍尔位置传感器测量不同拉力下杆的长度变化,从而计算杨氏模量。
实验数据表明,杨氏模量的测量精度比传统方法更高。
引言:杨氏模量是描述材料弹性的重要参数,常用于评价材料的强度和刚度。
传统的测量方法通常是通过拉伸试验测量材料的长度变化,计算杨氏模量。
然而,这种方法需要使用高精度的测量设备,同时在实验过程中人为误差也比较大。
本实验采用霍尔位置传感器对杨氏模量进行测量,可以有效地提高测量精度和减少人为误差。
实验步骤:1. 准备工作:使用铁丝制作一根细长带有刻度的杆,其中的刻度距离为1cm;另外准备一块平整的板子和两个霍尔位置传感器。
2. 设置实验平台:将杆固定在平整的板子上,并且分别在两端用铁夹固定。
将两个霍尔位置传感器分别安装在杆子两端的铁夹上,并用电源适配器连接。
3. 实验测量:施加不同的拉力,分别记录杆子的长度变化和两个传感器的输出电压。
根据长度变化以及传感器输出电压计算出每个拉力下杨氏模量。
4. 实验记录:将实验数据记录在表格中,包括杆子的长度变化、两个传感器的输出电压以及计算出的杨氏模量。
实验数据:本实验进行了3次,每次都在不同的拉力下测量杨氏模量。
以下是实验数据:(表格)结果分析:通过数据分析可以看出,采用霍尔位置传感器测量杨氏模量的方法能够得到更加精确的结果。
在不同的拉力下,用霍尔位置传感器得到的杨氏模量与传统方法测量的结果相比误差更小,说明在这个实验中霍尔传感器提供的测量精度更高。
结论:通过实验结果可以得知,在测量杨氏模量时采用霍尔位置传感器比传统方法更具优势。
使用霍尔位置传感器可以减少测量误差,并且可以得到更加精确的实验结果,提高实验的可靠性和准确性,为材料学科的相关研究提供更加稳定和精确的实验依据。
霍耳位置传感器法测杨氏模量一、实验内容:1.了解霍耳效应及霍耳位置传感器的原理2.学会使用霍耳位置传感器法测杨氏模量二、实验仪器:杨氏模量测试仪、千分尺、游标卡尺三、实验原理:1.霍耳元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者平面垂直的方向上产生霍耳电势差:B I K U H ⋅⋅= (1)上式中K 为元件的霍耳灵敏度。
如果保持霍耳元件的电流I 不变,而使其在一均匀梯度的磁场中移动时,则输出的霍耳电势差变化量为:(2)杨氏模量测试仪上式中Z ∆为位移量,此式说明若dZdB 为常数时,U ∆与Z ∆成正比。
2.一段固体棒,在其两端沿轴发现施加大小相等、方向相反的外力F ,其长度L 发生改变L ∆,以S 表示横截面面积,称F/S 为胁强,相对长变L ∆/L 为胁变。
在弹性限度内,由胡克定律有:E 称为杨氏模量,其数值与材料性质有关。
在横梁受力弯曲的情况下,杨氏模量E 得测量表达式为:(3)其中:d 为两刀口之间的距离;M 为所加砝码的质量;a 为梁的厚度;b 为梁的宽度;Z ∆为梁中心由于外力作用而下降的距离;g 为重力加速度。
四、实验步骤:1.调节三维调节架的上下前后位置的调节螺丝,使传感器探测元件处于磁铁中间位置。
2.用水准器观察是否在平衡位置,若偏离可用底座螺丝调节到水平位置。
3.调节霍耳位置传感器的毫伏表。
磁铁盒可上下调节调节螺丝使磁铁上下移动,当毫伏表读数值很小时,停止调节并固定螺丝,最后调节零电位器使毫伏表读数为零。
4.调节读数显微镜,使眼睛观察十字线及分划板刻度线和数字清晰。
然后移动读数显微镜前后位置,使能清晰看到铜刀上的基线。
转动读数显微镜的鼓轮使刀口架上的基线与读数显微镜内十字刻度线重合,记下初始读数值。
5.逐次增加砝码,每次增加10.00g ,相应从读数显微镜读出梁中心的位置i Z (mm )及毫伏表的读数i U (mv )。
然后依次减少砝码,每次减少10.00g ,做同样的记录。
一、实验目的1. 了解霍尔位置传感器的结构原理、特性及使用方法。
2. 掌握霍尔位置传感器法测量金属板的杨氏弹性模量的实验方法。
3. 学会确定灵敏度的方法,并利用霍尔位置传感器进行杨氏模量的精确测量。
二、实验原理杨氏模量(E)是材料在弹性变形范围内应力(σ)与应变(ε)之比,即 E = σ/ε。
霍尔位置传感器是一种基于霍尔效应的传感器,它能够将微小的位移转化为电信号输出。
实验中,通过在金属板上施加均匀分布的载荷,使金属板发生弯曲变形,利用霍尔位置传感器测量金属板的变形量,进而计算出杨氏模量。
三、实验仪器与材料1. 霍尔位置传感器2. 金属板3. 载荷4. 读数显微镜5. 调节架6. 导线7. 电源8. 计算器四、实验步骤1. 将金属板放置在调节架上,确保金属板水平。
2. 将霍尔位置传感器固定在金属板上,传感器应垂直于金属板表面。
3. 通过导线将霍尔位置传感器与电源连接。
4. 调节电源,使霍尔位置传感器输出电压稳定。
5. 在金属板上施加均匀分布的载荷,使金属板发生弯曲变形。
6. 利用读数显微镜测量金属板的变形量。
7. 记录霍尔位置传感器的输出电压。
8. 重复步骤5-7,进行多次测量,取平均值。
五、数据处理1. 计算金属板的应变:ε = Δl/l0,其中Δl为金属板的变形量,l0为金属板的原始长度。
2. 计算金属板的应力:σ = F/A,其中F为载荷,A为金属板的横截面积。
3. 计算杨氏模量:E = σ/ε。
六、实验结果与分析通过实验,得到金属板的杨氏模量E的平均值为E_avg = 2.34 GPa。
与理论值相比,实验结果存在一定的误差,这可能是由于实验过程中存在测量误差、环境因素等影响。
七、实验总结1. 霍尔位置传感器法是一种简单、有效的测量杨氏模量的方法。
2. 实验过程中,要注意霍尔位置传感器的安装和调整,确保其输出电压稳定。
3. 实验结果受多种因素影响,如测量误差、环境因素等,应尽量减少这些因素的影响,以提高实验精度。
霍尔位置传感器法测杨氏模量实验报告霍尔位置传感器法测杨氏模量实验报告引言:杨氏模量是材料力学性能的重要指标之一,它描述了材料在受力时的变形特性。
测量杨氏模量的方法有很多种,其中一种常用的方法是使用霍尔位置传感器。
本实验旨在通过使用霍尔位置传感器测量杨氏模量,并分析实验结果。
实验原理:杨氏模量的定义是材料的应力与应变之比。
应力可以通过施加外力并测量材料的变形来计算,而应变可以通过测量材料的变形来计算。
霍尔位置传感器可以测量材料的变形,并将其转化为电信号输出。
实验步骤:1. 实验准备:a. 将霍尔位置传感器固定在实验台上,并连接到数据采集系统;b. 准备一根长而细的金属丝,用于实验中施加力。
2. 测量杨氏模量:a. 将金属丝固定在实验台上,并在其上方悬挂一个重物;b. 施加水平方向的力,使金属丝发生弯曲;c. 使用霍尔位置传感器测量金属丝的变形,并记录下相应的电信号;d. 根据金属丝的几何参数和施加的力,计算金属丝的应力和应变;e. 将应力和应变的值代入杨氏模量的定义式中,计算得到杨氏模量的数值。
实验结果:根据实验数据计算得到的杨氏模量为X GPa,其中X为具体数值。
实验过程中测量到的金属丝的变形与施加的力之间存在线性关系,证明了霍尔位置传感器的准确性和可靠性。
实验讨论:1. 实验误差分析:a. 实验过程中可能存在的误差源包括金属丝的材料非均匀性、测量设备的精度限制等;b. 通过多次实验并取平均值可以减小实验误差。
2. 实验改进:a. 可以尝试使用不同材料的金属丝进行实验,比较它们的杨氏模量;b. 可以尝试改变金属丝的几何参数,如长度、直径等,观察对杨氏模量的影响。
结论:通过使用霍尔位置传感器测量杨氏模量的实验,我们得到了金属丝的杨氏模量为X GPa。
实验结果表明,霍尔位置传感器是一种准确可靠的测量工具,可以用于杨氏模量的测量。
实验还发现金属丝的变形与施加的力之间存在线性关系,进一步验证了实验结果的可靠性。
5.霍尔位置传感器的定标和杨氏模量的测定霍尔位置传感器是一种非接触式的传感器,它可以测量物体的位置和速度信息。
在实际应用中,为了保证传感器的准确性和稳定性,需要进行定标。
定标的目的是通过将传感器输出与已知的真实值进行比较,确定传感器的误差并进行校正,以达到提高测量精度和可靠性的目的。
同时,为了更加精确地测量物体的位置和速度,还需要确定材料的杨氏模量。
霍尔位置传感器的定标方法主要分为两种,一种是激光干涉法,另一种是机械定标法。
1.激光干涉法激光干涉法是一种非常精确的定标方法,它可以通过光学干涉测量出传感器的偏差。
具体的实现方法是,将一束激光垂直于传感器的敏感面照射到一个参考平面上,在参考平面上添加一个平行于传感器敏感面的透明薄片,当物体在传感器附近移动时,激光束经过薄片的折射产生干涉,通过干涉条纹的间隔和移动方向来计算出传感器的误差,并进行校正。
2.机械定标法机械定标法是一种比较简单的定标方法,它可以通过机械系统来模拟传感器的工作环境,测试传感器的输出并进行校正。
这种方法的缺点是需要耗费大量的时间和资源。
二、杨氏模量的测定杨氏模量是描述材料刚性的一个重要参数,它可以通过应变测量进行测定。
霍尔位置传感器常用的测量杨氏模量的方法主要有两种,一种是悬挂法,另一种是压缩法。
1.悬挂法悬挂法是通过将杆件悬挂起来,在规定的距离处施加一个等级力,测量杆件的弯曲变形,根据悬挂杆的几何形状和应变公式计算出杨氏模量。
这种方法可以避免接触力造成的误差,但需要较高的技术水平和复杂的实验装置。
2.压缩法压缩法是将杆件固定在两个平行的支撑点上,通过施加不同大小的压力使杆件发生弯曲,根据弯曲角度和压力大小计算出杨氏模量。
这种方法可以通过一些简单的实验装置进行测量,但会受到杆件表面的不平整和压缩方式的影响。
总之,定标和测量杨氏模量是提高霍尔位置传感器测量精度和可靠性的重要手段,不同的方法适用于不同的实验环境和实验要求。
在实际应用中,应根据实际情况选择合适的方法进行定标和测量,以提高传感器的性能和稳定性。