状态反馈极点配置基本理论与方法
- 格式:docx
- 大小:130.72 KB
- 文档页数:7

实验 6 极点配置与全维状态观测器的设计一、实验目的1. 加深对状态反馈作用的理解。
2. 学习和掌握状态观测器的设计方法。
二、实验原理在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容1.已知系统(1)判断系统稳定性,说明原因。
(2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置?(4)使用状态反馈进行零极点配置的前提条件是什么?1.(1)(2)代码:a=[-2 -1 1;1 0 1;-1 0 1];b=[1,1,1]';p=[-1,-2,-3]';K=acker(a,b,p)K =-1 2 4(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。
从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。
(4)使用状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
(1)给出原系统的状态曲线。
(2)给出观测器的状态曲线并加以对比。
(观测器的初始状态可以任意选取)观察实验结果,思考以下问题:(1)说明反馈控制闭环期望极点和观测器极点的选取原则。
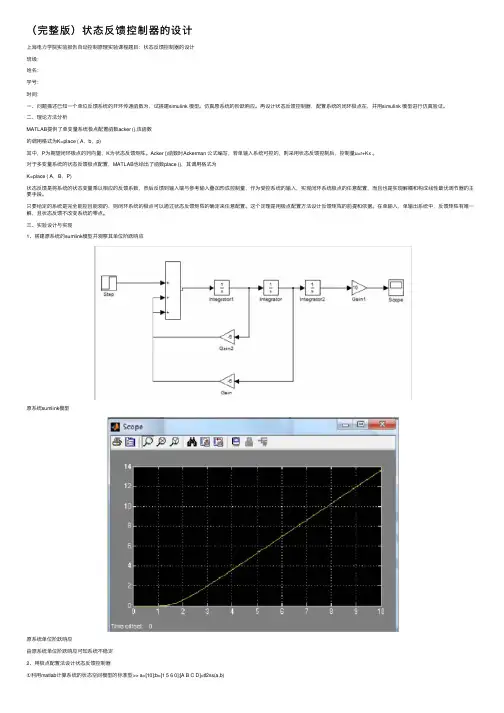
(完整版)状态反馈控制器的设计上海电⼒学院实验报告⾃动控制原理实验课程题⽬:状态反馈控制器的设计班级:姓名:学号:时间:⼀、问题描述已知⼀个单位反馈系统的开环传递函数为,试搭建simulink 模型。
仿真原系统的阶跃响应。
再设计状态反馈控制器,配置系统的闭环极点在,并⽤simulink 模型进⾏仿真验证。
⼆、理论⽅法分析MATLAB提供了单变量系统极点配置函数acker (),该函数的调⽤格式为K=place ( A,b,p)其中,P为期望闭环极点的列向量,K为状态反馈矩阵。
Acker ()函数时Ackerman 公式编写,若单输⼊系统可控的,则采⽤状态反馈控制后,控制量u=r+Kx 。
对于多变量系统的状态反馈极点配置,MATLAB也给出了函数place (),其调⽤格式为K=place ( A,B,P)状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊叠加形成控制量,作为受控系统的输⼊,实现闭环系统极点的任意配置,⽽且也是实现解耦和构成线性最优调节器的主要⼿段。
只要给定的系统是完全能控且能观的,则闭环系统的极点可以通过状态反馈矩阵的确定来任意配置。
这个定理是⽤极点配置⽅法设计反馈矩阵的前提和依据。
在单输⼊,单输出系统中,反馈矩阵有唯⼀解,且状态反馈不改变系统的零点。
三、实验设计与实现1、搭建原系统的sumlink模型并观察其单位阶跃响应原系统sumlink模型原系统单位阶跃响应由原系统单位阶跃响应可知系统不稳定2、⽤极点配置法设计状态反馈控制器①利⽤matlab计算系统的状态空间模型的标准型>> a=[10];b=[1 5 6 0];[A B C D]=tf2ss(a,b)A = -5 -6 01 0 00 1 0B = 1C = 0 0 10③系统能控性矩阵>> uc=ctrb(A,B)uc = 1 -5 190 1 -50 0 1 >> rank(uc) ans = 3 所以系统完全能控③系统能观型矩阵>> vo=obsv(A,C) vo = 0 0 100 10 010 0 0 >> rank(vo) ans = 3 所以系统完全能观所以可以⽤极点配置法设计状态反馈控制器④求解系统反馈矩阵>> p=[-3 -0.5+j -0.5-j];k=acker(A,B,p)k = -1.0000 -1.7500 3.7500 加⼊反馈后的系统闭环极点为:>>sysnew=ss(A-B*k,B,C,D);pole(sysnew)ans = -3.0000-0.5000 + 1.0000i-0.5000 - 1.0000i⑤搭建加⼊反馈控制器后系统的sumlink模型⑥观察新系统的单位阶跃响应四、实验结果分析加⼊反馈控制器后系统的闭环极点在,符合题⽬要求。
极点配置优缺点_控制系统极点配置实验报告范文课程名称:控制理论乙指导老师:姚唯成绩:实验名称:控制系统的极点配置实验类型:同组学生姓名:郁明非一、实验目的和要求(必填)二、实验内容和原理(必填)三、主要仪器设备(必填)四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填)七、讨论、心得实验目的和要求1.掌握全状态反馈系统的极点配置方法2.在Simulink仿真环境中,研究极点配置对系统特性的影响二、实验内容和原理(一)实验内容1.一被控对象,其传递函数为设计反馈控制器u=-k某,使闭环系统的极点为,,。
在Simulink仿真环境下,用基本环节组成经过极点配置后的系统,通过图形观察环节,观察系统的各点响应。
(二)实验原理对一给定控制系统如果其状态完全可控,则可进行任意极点配置即通过设计反馈増益K使闭环系统具有期望的极点。
极点配置有二种方法:第一种方法是采用变换矩阵T,使系统具有期望的极点,从而求出矩阵K;第二种方法基于Caylay-Hamilton理论,通过矩阵多项式φ(a),可求出K(这种方法称为Ackermann公式)。
在MATLAB中,利用控制系统工具箱函数place和acker进行极点配置设计。
三、主要仪器设备一台PC电脑,matlab仿真软件,imulink仿真环境实验源代码及实验结果functionjidianpeizhinum=[10];den=[1,6,11,6];[A,B,C,D]=tf2(num,den);J=[-2-j某2某qrt(3),-2+j某2某qrt(3),-10];K=place(A,B,J);Ky=(A-B某K,[0;0;0],eye(3),0);t=0:0.01:4;某=initial(y,[1;0;0],t);某1=[1,0,0]某某';某2=[0,1,0]某某';某3=[0,0,1]某某';ubplot(3,1,1);plot(t,某2);gridon;title('Reponetoinitialcondition');ylabel('某1');ubplot(3,1,2);plot(t,某2);gridon;ylabel('某2');ubplot(3,1,3);plot(t,某3);gridon;ylabel('某3');某label('t(ec)');实验结果K=8.000045.0000154.0000实验验证:>>num=[10];>>den=[16116];>>[A,B,C,D]=tf2(num,den);>>J=[-2-j某2某qrt(3),-2+j某2某qrt(3),-10];>>K=place(A,B,J)K=8.000045.0000154.0000>>A1=A-B某K;>>y=(A1,B,C,D);>>G1=zpk(y);>>G1=zpk(y)G1=10----------------------(+10)(^2+4+16)imulink仿真简单环节叠加仿真状态函数仿真心得、体会通过本次实验,掌握了状态反馈的概念,并且掌握了利用状态反馈进行极点配置的方法,学会了用MATLAB求解状态反馈矩阵。
现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
离散控制系统中的状态反馈控制在离散控制系统中,状态反馈控制是一种常用的控制策略。
它通过测量系统的状态并将其作为反馈信号,采取相应的控制动作来实现系统性能的优化。
本文将介绍离散控制系统中的状态反馈控制原理、设计方法和应用场景。
一、原理状态反馈控制的原理基于系统的状态空间表示。
离散控制系统的状态空间模型可以表示为以下形式:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k)其中,x(k)为系统在时刻k的状态向量,u(k)为控制输入向量,y(k)为输出向量;A、B、C为系统的矩阵参数。
状态反馈控制的目标是设计一个状态反馈矩阵K,使得控制输入u(k)与系统状态x(k)之间存在一定的线性关系。
即u(k) = -Kx(k)通过选择适当的状态反馈矩阵K,可以实现系统的稳定性、性能和鲁棒性等要求。
二、设计方法状态反馈控制的设计方法通常可以分为全状态反馈和部分状态反馈两种情况。
1. 全状态反馈全状态反馈指的是利用系统的全部状态信息进行控制。
在这种情况下,状态反馈矩阵K的每一个元素都与系统的状态变量相关。
全状态反馈可以实现系统的最优控制,但需要测量系统的全部状态变量,因此在实际应用中可能会受到限制。
2. 部分状态反馈部分状态反馈是指只利用系统的部分状态信息进行控制。
在这种情况下,状态反馈矩阵K的某些元素与系统的状态变量相关,而其他元素设为零。
部分状态反馈可以在减少测量需求的同时实现系统的稳定和性能优化。
状态反馈控制的设计方法通常采用基于稳定极点配置和线性二次型优化的思想。
具体的设计步骤包括:确定系统的状态空间模型,分析系统的稳定性和性能要求,选择适当的稳定极点位置,根据稳定极点位置计算状态反馈矩阵K,验证系统的性能和稳定性。
三、应用场景离散控制系统中的状态反馈控制在工业自动化、机器人控制、飞行器控制等领域有广泛的应用。
1. 工业自动化在工业自动化系统中,状态反馈控制可以实现对生产过程的精确控制。
例如,在温度控制系统中,通过测量系统的温度状态并进行反馈调节,可以实现对温度的精确控制,提高生产过程的稳定性和可靠性。
实验⼗⼀控制系统极点的任意配置实验⼗⼀控制系统极点的任意配置⼀、实验⽬的1. 掌握⽤全状态反馈的设计⽅法实现控制系统极点的任意配置;2. ⽤电路模拟的⽅法,研究参数的变化对系统性能的影响。
⼆、实验设备同实验⼀。
三、实验内容1. ⽤全状态反馈实现⼆阶系统极点的任意配置,并⽤电路模拟的⽅法予予以实现;2. ⽤全状态反馈实现三阶系统极点的任意配置,并通过电路模拟的⽅法予以实现。
四、实验原理由于控制系统的动态性能主要取决于它的闭环极点在S 平⾯上的位置,因⽽⼈们常把对系统动态性能的要求转化为⼀组希望的闭环极点。
⼀个单输⼊单输出的N 阶系统,如果仅靠系统的输出量进⾏反馈,显然不能使系统的n 个极点位于所希望的位置。
基于⼀个N 阶系统有N 个状态变量,如果把它们作为系统的反馈信号,则在满⾜⼀定的条件下就能实现对系统极点任意配置,这个条件就是系统能控。
理论证明,通过状态反馈的系统,其动态性能⼀定会优于只有输出反馈的系统。
设系统受控系统的动态⽅程为bu Ax x+= cx y =图11-1为其状态变量图。
图11-1 状态变量图令Kx r u -=,其中]...[21n k k k K =,r 为系统的给定量,x 为1?n 系统状态变量,u 为11?控制量。
则引⼊状态反馈后系统的状态⽅程变为bu x bK A x+-=)( 相应的特征多项式为)](det[bK A SI --,调节状态反馈阵K 的元素]...[21n k k k ,就能实现闭环系统极点的任意配置。
图11-2为引⼊状态反馈后系统的⽅框图。
图11-2 引⼊状态变量后系统的⽅框图1. 典型⼆阶系统全状态反馈的极点配置⼆阶系统⽅框图如11-3所⽰。
图11-3 ⼆阶系统的⽅框图1.1 由图得)15.0(10)(+=S S S G ,然后求得:223.0=ξ,%48≈p δ同时由框图可得:2115.01)(X S X R =+- ,2110X X = 所以:R X X X 222212+--= R X X ??+??--=2022100 []X X y 011== 1.2 系统能控性[]242200=??-=r a n k Ab b rank 所以系统完全能控,即能实现极点任意配置。
极点配置状态反馈控制器的设计王俊伟于新海(河套学院机电工程系)摘要围绕双级倒立摆案例,对极点配置状态反馈控制器的设计方法展开讨论,对最终的计算结果进行仿真,并通过仿真结果分析了系统的稳定性、动态性能和稳态误差情况。
倒立摆的开环系统状态空间模型状态不稳定且动态性能较差,通过引进极点配置状态反馈控制器,倒立摆的闭环系统状态达到稳定,而且动态性能得到改善。
关键词状态反馈控制器双级倒立摆极点配置能控标准型爱克曼公式动态特性稳态误差中图分类号TH865文献标识码B文章编号1000-3932(2021)01-0015-05极点配置状态反馈控制器设计得好坏直接决定了控制系统动态性能的优劣!配置极点的目的不仅是使系统稳定还要使系统的动态性能满足控制要求[1]!在配置状态反馈控制器时,根据被控制对象的要求,可以采用3种方法实现:极点配置状态反馈控制器的直接法、极点配置状态反馈控制器的变换法和爱克曼公式[2]'这3种方法仅适用于单输入系统,优点是只要系统能控,就可以实现极点配置的状态反馈,缺点是不能用于多输入系统的极点配置状态反馈控制器。
对于单输入系统,如果系统能控可以实现极点的任意配置,改善动态性能,但有可能使闭环控制系统的稳态误差变大[3]!1极点配置状态反馈控制器的直接法线性时不变系统如下:x=Ax+Bu(])'=Cx其中,X是系统的*维状态向量;*是状态向量对时间的导数;u是状态反馈控制律;#、B和C是适当维数的已知常数矩阵;'是系统的输出。
采用的状态反馈控制律是:u=-kx+v(2)其中,-是一维外部输入;k是反馈增益矩阵。
将式(2)代入式(1)得到闭环系统状态方程:*二(.-Bk)x+B-(3)极点配置状态反馈控制器的直接法分5步实现⑷。
第1步,检验系统(1)的能控性,如果系统能控,进行第2步。
第2步,计算闭环系统特征多项式:)et[!0—(#—Bk)]二!*+(3*_]+k*_14!*i1--------(3]+k])!+30+,0(4)其中,!是闭环极点。
控制工程学院课程实验报告:现代控制理论课程实验报告实验题目:状态反馈控制系统的设计与实现班级自动化(工控)姓名曾晓波学号2009021178 日期2013-1—6一、实验目的及内容实验目的:(1 )掌握极点配置定理及状态反馈控制系统的设计方法;(2 )比较输出反馈与状态反馈的优缺点;(3 )训练Matlab程序设计能力。
实验内容:(1 )针对一个二阶系统,分别设计输出反馈和状态反馈控制器;(2 )分别测出两种情况下系统的阶跃响应;(3 )对实验结果进行对比分析。
二、实验设备装有MATLAB的PC机一台三、实验原理一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息.(一) 利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。
设SIMO (Single Input —Multi Output )受控系统的动态方程为状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有这样便构成了状态反馈系统,其结构图如图1-1所示图1—1 SIMO 状态反馈系统结构图状态反馈系统动态方程为闭环系统特征多项式为()()f I A bk λλ=-+ (1—2) x b v u 1s C A k-y x设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式为)())(()(21*n f λλλλλλλ---= (1—3) 欲使闭环系统的极点取期望值,只需令式(1—2)和式(1-3)相等,即)()(*λλf f = (1-4) 利用式(1-4)左右两边对应λ的同次项系数相等,可以求出状态反馈矩阵 []n k k k 21=k(二) 对线性定常连续系统∑(A ,B ,C ),若取系统的输出变量来构成反馈,则所得到的闭环控制系统称为输出反馈控制系统。
状态反馈极点配置基本理论与方法IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】第2章 状态反馈极点配置设计基本理论引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图是一个多输入多输出线性时不变系统状态反馈的基本结构:图 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+=由图可知,加入状态反馈后,受控系统的输入为:u Fx v =+其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++=闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3)矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ=FX G =(4)特征向量法—先找到特征向量x j (等式中矩阵X 的列向量),然后利用等式求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
本文结合以上方法提出了一种新的设计方法:首先通过酉变换将状态方程化为一种控制规范形,然后利用最小二乘法解方程的得到最佳的状态反馈矩阵。
状态方程的规范形将线性时不变多变量完全能控系统记为:x Ax Bu =+其中x 和u 分别是n 维和m 维的实向量,A 和B 是合适阶次的恒定实矩阵。
极点配置是要求找到一个实反馈矩阵F ,使闭环系统矩阵A+BF 的特征值等于L ={λ1,…,λn },L 是一个复共轭的集合。
已知如果方程定义的系统是完全能控的,就可以进行极点配置。
极点配置问题转化为寻找矩阵X 和G ,使等式中的矩阵Λ满足ρ(Λ)=L 。
如果X 是可逆的,根据方程求解F 。
方程可以转化为等价的形式:T T T T T P AP P XQ P XQ Q Q P B GQ ⋅-⋅Λ=⋅其中P 和Q 是正交矩阵,()T 表示转置,使用正交矩阵可以保证方程的数值稳定性不变。
选择P 使(A ,B)可以转换为:()11121,11,21,11,,1,2,1,00000T Tk k k k k k k k k k k kk A A P AP P B A A A A A A A A B ------⎛⎫ ⎪⎪⎪=⎪ ⎪ ⎪⎝⎭此外,非对角线上的块A i,i+1选择满秩的下三角型:(),10000*00*****0i i A +⨯⎛⎫ ⎪⨯ ⎪⎪⨯=⎪ ⎪ ⎪ ⎪ ⎪⨯⎝⎭假定方程表示的系统为完全能控型,×表示非零的数,∗表示任意值。
对于任意给定矩阵Λ,找到Q 使它转化成Schur 型,在上三角矩阵Q T ΛQ 的对角线上存在2*2的块,表示L 的特征值中复共轭的部分。
如果L 中所有的特征值都是实数,Q T ΛQ 将是严格的上三角矩阵,而且特征值λi 都在对角线上。
因此如果期望的特征值全为实数,那么Λ是实Schur 矩阵,就不需要寻找矩阵Q 。
已知在方程中的T X P X =和G ,特征向量矩阵X 可以从下面式子得到:X PX =F 可以由得到,或者:FPX G =实数极点的配置对于方程,如果假设矩阵A 和B 已经转换成为标准形式,并且期望的闭环特征值全为实数,即Λ是实Schur 矩阵。
需要寻找非奇异矩阵X ,使方程满足矩阵G 。
假设X 的形式如下:100*1*1****1X ⎛⎫ ⎪ ⎪ ⎪=⎪ ⎪ ⎪ ⎪ ⎪⎝⎭显然矩阵X 满秩,而且满足下三角是标准的最小化。
假设所有的特征值λi 都是实数,将第j 列的X 、Λ、G 表示为:01,,0j j j j z g x λ⎛⎫⎛⎫⎪ ⎪⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭ M j1:j2表示矩阵M 的第j 1到j 2列,M j 表示M 的第j 列。
利用可以证明,存在矩阵X 满足等式。
j 为不同值时,等式可以表示为不同形式: 当1j =时:()()1112:11nx A B A g λλ⎛⎫⎡⎤-=- ⎪⎣⎦⎝⎭当1j n <<时:()()1:112:j j j j nj j z X A B x A g λλ-⎛⎫⎪⎡⎤-=- ⎪⎣⎦ ⎪⎝⎭当j n =时:[]()1:1n n n n n z X B A g λ-⎛⎫=- ⎪⎝⎭等式左端的矩阵M(j),是()1n n m ⨯+-维。
如果矩阵M(j)是行满秩的,方程有解,因此矩阵是右可逆的。
如果精确的选择矩阵A 、B 、X ,可以实现矩阵M(j)是行满秩阶梯矩阵。
对于给定闭环期望特征值{}j λ,X 的列X j 按照1,,j n =⋯的顺序递推得到。
方程可以用常规的最小二乘法得到。
最后结果z j 、x j 、g j 是最小的2-范数或者最小的F-范数。
在方程、和中正交矩阵P 的范数将不影响最小范数。
以上算法证明了,对于完全能控系统,任意给定的一组实数闭环特征值L ,都可以进行极点配置。
混合极点的配置假定矩阵A 和B 已经化为阶梯控制型标准型。
当闭环的期望特征值中包含共轭复数时,将矩阵Λ化为Schur 型,共轭的闭环特征值在对角线上是2*2的块,其余的实数闭环特征值在对角线上。
假设特征值j λ和1j j λλ+=是一组共轭复极点,复共轭部分可以表示为2*2的块:jj j jj a b b a -⎛⎫Λ=⎪⎝⎭假设:1:100j j j j j j j j z z a b b a ++⎛⎫ ⎪- ⎪Λ= ⎪ ⎪ ⎪⎝⎭对于方程中第j 和j+1列,当11j n <<-时:():1:1:11:11,j j j j j j j j j j AX X BG X z z +++-+-Λ=+使用Kronecker 乘积⊗,将等式和等式带入中得到:()()(),1,1,1M j j v j j r j j ++=+矩阵()()1:1222,1,,j M j j X I M B I -+=⊗⊗是()()2223n n m ⨯+-维的。
并且2n 维向量()1,1r j j M +=,其中:当1j =和1j n =-,容易得到和相似的等式,等式中矩阵和向量中不重要的部分省略。
在等式中,矩阵(),1M j j +也是行满秩形式。
等式可以被递推得到,对于j 的增加值,并且可以得到最小范数解。
以上算法证明了,对于完全能控系统,任意给定的一组混合闭环特征值L ,都可以进行极点配置。
镇定不可控系统的极点配置为了保证当等式表示的矩阵是不能控系统时,以上计算方法仍然成立,使用不可控再分配。
对于镇定的不可控系统,其所有的不可控的部分都是稳定,镇定部分不需要进行极点配置。
因此,镇定的不可控系统可以将等式可以记做:()112122200TT APAP P B A A B ⎛⎫= ⎪⎝⎭这种阶梯标准型本质上将系统矩阵A 和B 分为两部分:A 22是能控的部分,A 11是不能控的部分,A 21是耦合的部分。
()12,F F F =矩阵为反馈矩阵,那么闭环系统矩阵将是下面的表示形式:11212122220A AB F A B F ⎛⎫ ⎪⎪++⎝⎭因此任何反馈将不影响不能控部分的值。
此外,由A 22和B 2组成的系统是能控的。
假设矩阵A 和B 已经化为等式中的形式,同时假设等式中的矩阵X 和Λ形式为:11112122212200,XX X X Λ⎛⎫⎛⎫=Λ= ⎪ ⎪ΛΛ⎝⎭⎝⎭那么等式可以被分成三部分,第四个等式简化为0=0。
111111110A X X -Λ=()11222222220A B F X X +-Λ=()()()2121222121112221212111T X A B F X X X A B F X +-Λ=Λ-+等式表示不可控子系统,并且只要矩阵Λ11的余项等于不可控矩阵A 11的余项,就容易选择矩阵X 11。
其中最简单的方法是用X 11Λ11X 11-1作为A 11的Schur 分解。
等式表示能控子系统的极点配置问题,此时的子系统的状态反馈极点配置的方法与能控系统极点配置的方法相同,因此可以容易确定矩阵X 22和Λ22,最后得出反馈矩阵F 2。
对于任何一个任意矩阵F 1和Λ21,可以选择满足等式的矩阵X 21去修改不可控模型的特征向量。
如果Λ11和Λ22的余项有交集,那么等式左侧的T 变换是可逆的。
在这种情况下,矩阵Λ21可以由下面等式得出:()1212221212111X T X A B F X -=Λ-+⎡⎤⎣⎦如果T 变换是不可逆的,对于期望的矩阵Λ21,当X 22是非奇异的时候,等式右端是T 变换的一种方式。
除此之外,可以使用Kronecker 乘积扩张等式,并且在最小的误差范围里计算出这个线性等式。
因此对于F 1和Λ21,最简单的是选择()(){}1212221211121X A B F X T X -Λ=++。
以上算法证明了,对于镇定的不能控系统,任意给定的一组闭环特征值L ,都可以进行极点配置。
但是对于不是镇定的系统,还需要进行近一步的研究。
小结本章中介绍了一种对于完全能控系统和镇定的不能控系统,任意给定的一组期望闭环特征值L ,进行极点配置的方法。
使用最小二乘法得到z j 、x j 、g j 。
其中z j 、x j 分别是三角矩阵Λ和X 的非对角线的部分,他们的最小化意味着对称性“比较好”,并且以此为条件对于矩阵X 和特征值问题包含在矩阵Λ中。
此外,方程表示为:1F X G -≤当X 状态足够良好并且g j 最小时,不等式意味着反馈矩阵F 是合理的小,不等式的反馈上界最小。
等式的值将是数值稳定在良好状态下的矩阵X 。
本文中的方法明显依赖于L 中特征值的顺序。
通过特征值的不同的随机排列,可以选择简单的算法。
最后在最优化条件和经济算法条件下得到反馈矩阵F 。