F28335DSP硬件设计资料
- 格式:ppt
- 大小:1.28 MB
- 文档页数:30

T M S320F28335中文资料TMS320F28335中文资料TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。

TMS320F28335 TechV_28335目录1DSP的PWM信号 (1)1.1简介 (1)1.2端口对应关系 (2)1.3初始化程序注释 (2)2DSP的CAN通信 (4)2.1CAN2.0B协议简述 (4)2.2CAN总线电平 (5)2.3CAN总线上的120欧电阻 (6)2.4DSP的CAN时钟模块 (6)2.5邮箱初始化例程注解 (7)2.6消息发送和接收 (8)2.7CAN的适配器存在的一些问题 (9)3DSP的32位浮点运算测试 (10)4DSP定时器中断 (11)4.1DSP28335的定时器 (11)4.2定时器分频 (11)4.3计数器计数 (12)4.4定时器时钟周期 (12)5DSP看门狗复位 (12)5.1看门狗时钟 (12)5.2看门狗系统控制和状态寄存器(SCSR) (13)5.3看门狗计数寄存器(WDCNTR) (13)5.4看门狗重启管理器(WDKEY) (14)5.5看门狗控制寄存器(WDCR) (14)6软件报错与处理 (15)6.1CCS Setup中仿真器的配置 (15)6.2Connect报错——1145——换仿真器解决 (17)6.3CAN口测试A发B收,数据发不出去 (19)6.4编译Pwm测试文件出错 (19)6.5could not open source file "DSP2833x_Device.h (20)7备注与注意事项 (22)8附录C源程序 (22)8.1PWM初始化及脉冲产生函数 (22)8.2邮箱初始化函数 (33)8.3浮点运算测试函数 (36)8.4定时器中断初始化函数 (38)8.5采用定时器的延时函数 (39)8.6看门狗初始化函数 (40)1DSP的PWM信号1.1简介DSP28335共12路16位的ePWM,能进行频率和占空比控制。
ePWM的时钟TBCLK=SYSCLKOUT/(HSPCLKDIV×CLKDIV):PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。
引言TMS320F28335型数字信号处理器是TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
它采用内部1.9 V供电,外部3.3 V供电,因而功耗大大降低。
且主频高达150 M Hz,处理速度快,是那些需要浮点运算便携式产品的理想选择。
2 TMS320F28335简介TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GP I00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。

TMS320F28335 TechV_28335目录1DSP的PWM信号 (1)1.1简介 (1)1.2端口对应关系 (2)1.3初始化程序注释 (2)2DSP的CAN通信 (4)2.1CAN2.0B协议简述 (4)2.2CAN总线电平 (5)2.3CAN总线上的120欧电阻 (6)2.4DSP的CAN时钟模块 (6)2.5邮箱初始化例程注解 (7)2.6消息发送和接收 (8)2.7CAN的适配器存在的一些问题 (9)3DSP的32位浮点运算测试 (10)4DSP定时器中断 (11)4.1DSP28335的定时器 (11)4.2定时器分频 (11)4.3计数器计数 (12)4.4定时器时钟周期 (12)5DSP看门狗复位 (12)5.1看门狗时钟 (12)5.2看门狗系统控制和状态寄存器(SCSR) (13)5.3看门狗计数寄存器(WDCNTR) (13)5.4看门狗重启管理器(WDKEY) (14)5.5看门狗控制寄存器(WDCR) (14)6软件报错与处理 (15)6.1CCS Setup中仿真器的配置 (15)6.2Connect报错——1145——换仿真器解决 (17)6.3CAN口测试A发B收,数据发不出去 (19)6.4编译Pwm测试文件出错 (19)6.5could not open source file "DSP2833x_Device.h (20)7备注与注意事项 (22)8附录C源程序 (22)8.1PWM初始化及脉冲产生函数 (22)8.2邮箱初始化函数 (33)8.3浮点运算测试函数 (36)8.4定时器中断初始化函数 (38)8.5采用定时器的延时函数 (39)8.6看门狗初始化函数 (40)1DSP的PWM信号1.1简介DSP28335共12路16位的ePWM,能进行频率和占空比控制。
ePWM的时钟TBCLK=SYSCLKOUT/(HSPCLKDIV×CLKDIV):PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。
基于 TMS320F28335的信号处理电路设计摘要:鉴于TMS320F206即将停产,需要寻求一款DSP对其进行替代,替换DSP后的信号处理电路需完成温度值、一路电气零位、三路加表惯性量、三路陀螺惯性量的采集以及惯性量的补偿计算和数据组帧发送的功能。
该信号处理电路基于浮点DSP TMS320F28335,该DSP的引用简化了惯性测量装置中的误差补偿计算,为单位类似的产品提供了一套可行方案。
TMS320F28335丰富的外设使得信号处理电路具有可再简化的潜力,其在惯性测量装置信号处理电路中的应用具有广阔前景。
通过系统试验,验证了系统软硬件设计的正确性高的应用推广价值。
关键词:DSP;信号处理电路;浮点1、前言现有技术方案主要为TMS320F206+异步串口SC28L202的方案,电路上电后完成外围电路的初始化,TMS320F206通过SC28L202相应的I/O完成AD7716的配置,AD7716初始化完成后每隔一个固定时间自动完成加表数据的采集并输出一个中断信号,所采数据存于FIFO中。
陀螺每隔一个固定时间将一帧数据存于SC28L202的FIFO中,当TMS320F206判到第四个AD7716中断来到后从相应的FIFO中取加表、陀螺数据,TMS320F206完成加表、陀螺数据温度补偿计算后组帧并向相应的接口发送数据。
本文以某信号处理电路设计为背景,为了解决TMS320F206即将停产的问题,电路架构由TMS320F206+异步串口SC28L202的方案升级为TMS320F28335+异步串口TL16C752CIPFB架构。
其中DSP为TI公司的TMS320F28335 [1],异步串口为TI公司的TL16C752CIPFB [2]。
2、某信号处理电路原理TMS320F206+异步串口SC28L202架构设计信号处理电路采用了TMS320F206+异步串口SC28L202架构。
信号处理电路主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及控制电路、外设输出接口电路组成。
基于DSP的逆变器硬件设计本文针对中小功率三相变频电源,提出基于DSP28335控制器对三相电压型桥式逆变电路做系统设计工作。
从逆变器的工作原理、逆变系统硬件设计以及逆变系统软件设计三个方面在文中进行论述。
硬件设计包括以DSP (TMS320F28335)为核心控制器的最小系统,采用PWM控制技术,设计出控制电路。
以主电路、驱动电路、保护电路、滤波电路、采样电路和其他辅助电路的硬件设计为基础组成一套完整的逆变输出系统。
并以交流异步电机作为负载,实现其恒压频比调速的控制目标。
标签:逆变器,异步电机,三相桥式逆变,恒压频比控制,DSP283351 研究背景和意义随着电力电子技术及电力半导体的飞速发展,发达国家大量推广采用了逆变技术的电源,由此推动了各种工业技术的发展,也促进了逆变式电源的发展。
电力电子功率开关器件的高压大容量化、集成化、全控化、高频化及多功能化方向的发展,相信不久的将来逆变电源将会进入一个新的发展时代[3]。
现代逆变技术是研究逆变电路理论和应用的一项科学技术,它建立在工业电子技术、半导体器件技术、现代控制技术、现代电力电子技术、半导体交流技术、脉宽调制(PWM)技术等学科基础之上的一项实用技术。
它的研究对逆变器性能的提高与进一步推广应用,以及对电力电子技术的发展,都有十分重要的意义,是当前逆变器的发展方向之一。
逆变技术是电力能源利用、提高供电质量等领域的重要环节,逆变器作为核心装置,实现电源交换系统中重要的能量转换,决定了系统输出的稳定性和转换效率,是当今世界在电源交换领域研究的重点。
2 三相桥式逆变电路原理三个单相逆变电路可以组合成一个三相逆变电路。
但在三相逆变电路中,应用最为广泛的还是三相桥式逆变电路,采用IGBT作为开关器件的三相电压型桥式逆变电路如图2-1所示,可以看成是由三个半桥逆变电路组成。
电路的直流侧通常只有一个电容器就可以了,但为了方便分析,画作串联的两个电容器并标出假想中点N’。
关于dsp28335的课程设计一、课程目标知识目标:1. 理解DSP28335芯片的基本结构、功能及其在数字信号处理中的应用。
2. 掌握DSP28335的编程环境搭建和基本编程方法。
3. 学习DSP28335的寄存器配置、中断处理和定时器等硬件资源的使用。
4. 了解DSP28335在嵌入式系统中的实际应用案例。
技能目标:1. 能够使用DSP28335的集成开发环境进行程序编写、编译和调试。
2. 能够编写简单的程序实现对DSP28335芯片硬件资源的控制。
3. 学会查阅相关资料,分析并解决在DSP28335应用过程中遇到的问题。
情感态度价值观目标:1. 培养学生对数字信号处理技术的兴趣,提高对DSP芯片在工程应用中重要性的认识。
2. 培养学生具备良好的团队合作意识,学会在团队中发挥个人特长,共同解决问题。
3. 培养学生严谨、务实的学术态度,养成良好的编程习惯。
课程性质:本课程为高年级电子、通信、自动化等专业学生的专业核心课程,旨在帮助学生掌握DSP芯片的基本原理和编程方法,提高学生在实际工程应用中的问题解决能力。
学生特点:学生具备一定的电子技术基础和编程能力,对硬件和软件有一定了解,但可能对DSP芯片的具体应用尚不熟悉。
教学要求:结合学生特点,注重理论与实践相结合,通过案例教学、实验操作等方式,帮助学生掌握课程内容,提高实际应用能力。
在教学过程中,注重启发式教学,引导学生主动思考、探索和解决问题。
二、教学内容1. DSP28335芯片概述:介绍DSP28335的基本结构、性能特点及在数字信号处理领域的应用。
- 教材章节:第1章DSP芯片概述2. DSP28335硬件资源:讲解DSP28335的内部硬件资源,如CPU、内存、外设接口等。
- 教材章节:第2章DSP硬件资源3. DSP28335编程环境:介绍集成开发环境(如CCS)的安装与配置,以及基本编程方法。
- 教材章节:第3章编程环境与工具4. DSP28335编程基础:讲解寄存器操作、中断处理、定时器等基本编程技术。
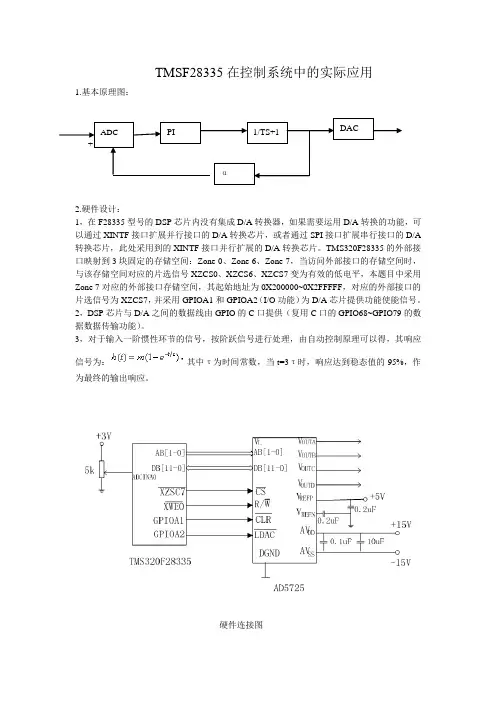
TMSF28335在控制系统中的实际应用1.基本原理图:2.硬件设计:1,在F28335型号的DSP芯片内没有集成D/A转换器,如果需要运用D/A转换的功能,可以通过XINTF接口扩展并行接口的D/A转换芯片,或者通过SPI接口扩展串行接口的D/A 转换芯片,此处采用到的XINTF接口并行扩展的D/A转换芯片。
TMS320F28335的外部接口映射到3块固定的存储空间:Zone 0、Zone 6、Zone 7,当访问外部接口的存储空间时,与该存储空间对应的片选信号XZCS0、XZCS6、XZCS7变为有效的低电平,本题目中采用Zone 7对应的外部接口存储空间,其起始地址为0X200000~0X2FFFFF,对应的外部接口的片选信号为XZCS7,并采用GPIOA1和GPIOA2(I/O功能)为D/A芯片提供功能使能信号。
2,DSP芯片与D/A之间的数据线由GPIO的C口提供(复用C口的GPIO68~GPIO79的数据数据传输功能)。
3,对于输入一阶惯性环节的信号,按阶跃信号进行处理,由自动控制原理可以得,其响应信号为:其中τ为时间常数,当t=3τ时,响应达到稳态值的95%,作为最终的输出响应。
硬件连接图3.软件控制编程:实现功能:AD采样+PI调节+一阶惯性/*****************head file********************/#include "DSP2833x_Device.h"#include "DSP2833x_Examples.h"/****************macro*****************/#define S1 AdcRegs.ADCST.bit.INT_SEQ1/***************global variable************/float this_zl;float upon_zl;int PIn=0; //symbol parameterint SCn=0; // symbol parameterfloat adclo=0; //AD referenced voltagefloat adcres=65536;float Ta; //一阶系统时间常数float temp=0.950213;int sc_D;float mf_scz;float mf_sc; //outputunsigned int * Sda;float power_set;float power_get; // actual output voltagefloat KP_wr; //PI proportion coefficientfloat KI_wr; //PI integral coefficientfloat error_sg; //PI correlative parameterfloat error_1;float error_2;/****************function*******************/interrupt void cpu_timer0_isr(void);interrupt void ad_isr(void);void Init_Timer0(void);void Init_Xintf(void);void Init_Gpio(void); //GPIO initialization program void Initadc(void); //AD initializefloat PI_T(float power_sd,float pow_in); //PI control functionvoid delay_ys(void); //delay subprogram/***************main function**********************/void main(void){unsigned int * Sda =(unsigned int *) 0x200000; //define DA address,XINTF Zone7 InitSysCtrl(); // initialize system subprogramInit_Timer0();DINT;InitPieCtrl();IER=0x0000;IFR=0x0000;InitPieVectTable();Init_Gpio();Initadc();Init_Xintf();CpuTimer0Regs.TCR.bit.TIE=1;EALLOW; // 解除寄存器保护PieVectTable.TINT0=&cpu_timer0_isr; //用CUP_Timer0中断函数入口更新//PIE向量表PieVectTable.ADCINT=&ad_isr; //用AD中断函数更新PIE向量表EDIS; //使能寄存器保护ConfigCpuTimer(&CpuTimer0,150,500); //timing 500usStartCpuTimer0();PieCtrlRegs.PIEIER1.all=0x60; //使能PIE内的CUP_Timer0和AD//中断IER |=0x0001; // 使能CPU INT 1EINT;}*****************CPU timer initialization***********************************void Init_Timer0(void){CpuTimer0Regs.PRD.all=75000; //set timer period timing:500usCpuTimer0Regs.TPR.all=0;CpuTimer0Regs.TPRH.all=0;//CpuTimer0Regs.TCR.bit.TSS=1; //stop timer}********************A/D initialization**********************************void Initadc(void){long i; //AD initializeAdcRegs.ADCTRL1.bit.RESET=1;for(i=0;i<100;i++) {};AdcRegs.ADCTRL1.bit.RESET=0;AdcRegs.ADCTRL1.bit.SUSMOD=0;AdcRegs.ADCTRL1.bit.ACQ_PS=0; //setting sample windowAdcRegs.ADCTRL1.bit.CPS=0;AdcRegs.ADCTRL1.bit.CONT_RUN=0; //启动-停止模式AdcRegs.ADCTRL1.bit.SEQ_CASC=0; //AdcRegs.ADCTRL3.bit.ADCBGRFDN=3; //给ADC模块的内部基准电路上电for(i=0;i<400000;i++) {}; //delay more than 7msAdcRegs.ADCTRL3.bit.ADCPWDN=1; //给ADC模块的其余模拟电路上电for(i=0;i<10000;i++) {}; //delay more than 20usAdcRegs.ADCTRL3.bit.ADCCLKPS=10;AdcRegs.ADCTRL3.bit.SMODE_SEL=0; //choose sample styleAdcRegs.ADCMAXCONV.all=0x0000;AdcRegs.ADCCHSELSEQ1.bit.CONV00=0x0000;AdcRegs.ADCST.bit.INT_SEQ1_CLR=1;AdcRegs.ADCTRL2.bit.RST_SEQ1=1; //复位排序器1AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1=1; //SEQ1 interruptAdcRegs.ADCTRL2.bit.INT_MOD_SEQ1=0; //choose interrupt style}*********************external peripherals initialization****************************** void Init_Xintf(void){EALLOW;XintfRegs.XINTCNF2.bit.XTIMCLK=1;XintfRegs.XTIMING6.bit.XWRLEAD=3;XintfRegs.XTIMING6.bit.XWRACTIVE=7;XintfRegs.XTIMING6.bit.XWRTRAIL=3;XintfRegs.XTIMING6.bit.XRDLEAD=3;XintfRegs.XTIMING6.bit.XRDACTIVE=7;XintfRegs.XTIMING6.bit.XRDTRAIL=3;XintfRegs.XTIMING6.bit.X2TIMING=0;EREADY=0;XintfRegs.XTIMING6.bit.XSIZE=3;EDIS;}********************************I/O initialization*******************************void Init_Gpio(void){EALLOW; //GPIO initializeGpioCtrlRegs.GPBMUX1.all=0xFFFFFC00; //设置B口为地址线以及DAC片选信号GpioCtrlRegs.GPCMUX1.all=0xFFFFFFFF; //set C Port as date addressGpioCtrlRegs.GPAMUX1.all=0x0000;GpioCtrlRegs.GPADIR.all= 0x0003;GpioDataRegs.GPADA T.all= 0x0003;GpioDataRegs.GPACLEAR.all= 0x0003; //choose GPIO1,2 as DA signal address EDIS;}****************************PI function****************************************** portal parameter:power_sd and pow_inexport parameter:this_zlfloat PI_T(float power_sd,float power_in){error_1 = error_sg;error_sg = power_sd - power_in;error_2 = error_sg - error_1;if(PIn == 0){error_2 = 4.0; //avoid error_2 too largePIn++;}this_zl = KP_wr*error_sg + KI_wr*error_2;error_sg = error_1;return this_zl;}*******************************Delay function*********************************** void delay_ys(void){long i;for(i=0;i<100000;i++) {};}*************************timer 0 interrupt deal function***********************interrupt void cpu_timer0_isr(void){DINT;StopCpuTimer0();CpuTimer0Regs.TCR.bit.TIF=1; //清CPU定时器0的中断标志PieCtrlRegs.PIEACK.all |=0x0001; //使能第一组中断以使AD产生的中断能// 被CPU响应AdcRegs.ADCTRL2.bit.SOC_SEQ1=1; //使能排序器,启动AD转换EINT;while(S1==0) {}; //等待AD转换的完成delay_ys();}************************AD interrupt function*********************************interrupt void ad_isr(void){DINT;AdcRegs.ADCTRL2.bit.RST_SEQ1=1;power_get=((float)AdcRegs.ADCRESULT0)*3.0/adcres + adclo; //对采样数据进行转换if(SCn == 0){mf_scz = 2.5;SCn++;}mf_sc=mf_scz;upon_zl=PI_T( power_get, mf_sc); //调用PI环节的函数mf_sc=1/Ta * upon_zl * temp; //通过一阶惯性环节的处理delay_ys();mf_scz=mf_sc;sc_D=(int)(mf_sc * 4096)/5;* (Sda) = sc_D; //写数据到DA的数据线AdcRegs.ADCST.bit.INT_SEQ1_CLR=1;PieCtrlRegs.PIEACK.all |=0x0001; //使能第一组中断EINT;StartCpuTimer0(); //启动定时器0,开始下一次采样}。

DSP学习相关知识1-F28335结构、资源和性能2014年4月23日16:331.DSP厂商:TI公司、ADI、motoloro。
2.C2000系列芯片主要应用与控制领域,C2812为定点运算。
C28335为浮点运算。
只有C2000系列才有Flash和异步串口。
3.DSP型号的含义:TMS320F28XX PGFATMS:合格产品;TMX:试验产品;TMP:模型产品;TMX和TMP是出厂前的产品。
320:表示为DSP系列产品;430:为MCU系列产品;470:为ARM系列产品。
F:内部存储器为Flash;C:内部存储为ROM。
PGF:表示引脚数和封装A:表示温度范围4.F28335结构、资源和性能:a、主频为150MHz(采用30MHz晶振经过PLL倍频后生成150MHz主频,先1/2分频,然后10倍频。
)。
b、内核供电电压1.9V,I/O供电电压为3.3V。
c、片内存储器:256K×16的Flash存储器,34K×16的SRRAM,1K×16OTP(一次性可编程)ROM。
程序在线调试时,程序可以下载到RAM,由于其掉电数据就会清除的特性,方便程序调试。
当程序调试完毕后,可以下载到Flash中,Flash掉电程序不会丢失,DSP上电后可以从Flash加载程序。
d.128位密码保护模块,保护Flash/OTP/RAM,防止固件被盗取。
秘钥不能全部为0,不然会锁死DSP。
f.3个32位定时器Timer。
一般使用定时器0,定时器1和2保留。
g.模数转换模块ADC(Analog to Digital Converter)12位,16通道,采样率为12.5MSP。
模数转换的基本原理:模拟量在时间上是连续的,数字信号是离散,将模拟信号转换为数字信号需要经过采样、保持、量化、编码四步完成,也可以将采样和保持合二为一,将量化和编码合二为一,分为两步完成模数转换。
采样就是对模拟信号进行定时测量,定时根据采样频率而定,采样完成后将信号保持一段时间,使A/D转换器有充足时间完成转换。
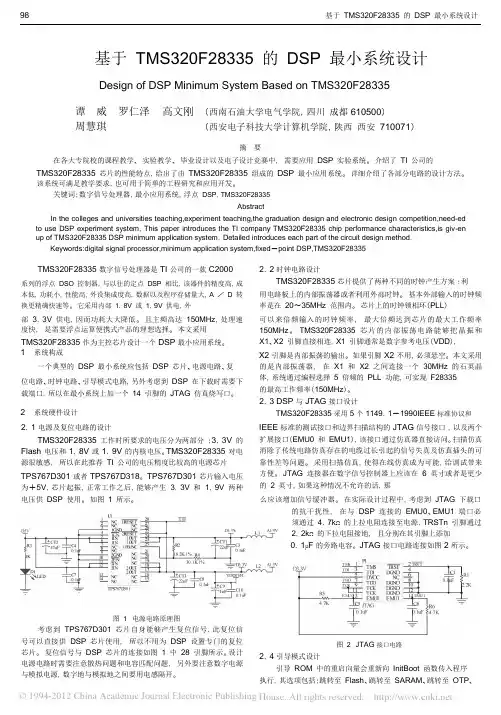
98基于TMS320F28335的DSP最小系统设计基于TMS320F28335的DSP最小系统设计Design of DSP Minimum System Based on TMS320F28335谭威罗仁泽高文刚(西南石油大学电气学院,四川成都610500)周慧琪(西安电子科技大学计算机学院,陕西西安710071)摘要在各大专院校的课程教学、实验教学、毕业设计以及电子设计竞赛中,需要应用DSP实验系统。
介绍了TI公司的TMS320F28335 芯片的性能特点,给出了由TMS320F28335 组成的DSP 最小应用系统。
详细介绍了各部分电路的设计方法。
该系统可满足教学要求,也可用于简单的工程研究和应用开发。
关键词:数字信号处理器,最小应用系统,浮点DSP,TMS320F28335AbstractIn the colleges and universities teaching,experiment teaching,the graduation design and electronic design competition,need-ed to use DSP experiment system.This paper introduces the TI company TMS320F28335 chip performance characteristics,is giv-en up of TMS320F28335 DSP minimum application system.Detailed introduces each part of the circuit design method.Keywords:digital signal processor,minimum application system,fixed-point DSP,TMS320F28335TMS320F28335 数字信号处理器是 TI 公司的一款 C2000 系列的浮点DSO控制器,与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
本科课程设计报告(2016至2017学年第一学期)设计题目:基于TMS320F28335 DSP微处理器的最小系统设计课程名称:数字信号处理专业名称:电子信息工程行政班级: 1313学号: 1313姓名:洪指导教师:赵报告时间: 2016 年 10 月 23 日目录一、引言TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和 EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出 (HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSC相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
F2833X在保持150MHz时钟速率不变的情况下,新型F2833X浮点控制器与TI前代领先数字信号控制器相比,性能平均提高50%。
与作用相当的32位定点技术相比,快速傅立叶转换(FFT)等复杂计算算法采用新技术后性能提升了一倍之多。
二、设计目的TMS320F28335及其最小应用系统是最基本的硬件和软件环境。
设计目的是能使用Protel设计电路原理图;了解F28335硬件的相关知识及电路设计;能使用CCS建立并调试DSP工程。
通过F28335最小电路的设计,可以将理论与实践统一联系,更深入地理解F28335的开发方法。
三、设计要求1、利用Protel软件绘制并添加TMS320F28335的原理图库;2、利用Protel软件绘制TMS320F28335最小系统的电路原理图,包括时钟电路模块,电源模块、复位电路模块、JTAG接口模块;3、安装最小系统电路,在CCS下建立工程,编译并将其下载到TMS320F28335最小系统中运行。
TMS320f28335控制AD7656的硬件电路设计
TMS320F28335简介TMS320F28335是一款TI高性能TMS320C28x系列32位浮点DSP处理器。
TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSP相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
TMS320F28335核心板电气特性TMS320F28335(SOM-TL28335核心板)工作环境
环境参数\最小值\典型值\最大值
工业级温度:0C\-\85C
工作电压:4.8V\5V\5.5V
SOM-TL28335(TMS320F28335)核心板功耗
供电电压:5V
输入电流:292mA
额定功率:1.46W
TL28335-EVM开发板功耗
供电电压:5V
最大输入电流:400mA
最大功率:2W。