第四章 形状和位置公差检测(一)
- 格式:ppt
- 大小:2.42 MB
- 文档页数:77
第四章形状和位置公差及检测(一)一、判断题1.有位置公差要求的被测要素都不是单一要素。
()2.在位置公差中基准只有一个。
()3.给定相互垂直的两个方向的垂直度要求时,公差带形状是一个四棱柱。
()4.定向公差带具有确定的位置,还具有综合控制被测要素的方向和形状的职能。
()5.三基面体系中的三个平面相互是垂直的。
()6.径向圆跳动中,在测量时测量仪器可以在圆柱面上来回移动。
()7.径向全跳动与圆柱度的公差带形状一样,故含义也一样。
()8.基准选择时,主要考虑基准统一原则,再兼顾设计要求及装配要求。
()二、解答题1.习题图4-1所示销轴的三种形位公差标注,它们的公差带有何不同?图4—1 销轴2.习题图4-2所示零件标注的位置公差不同,它们所要控制的位置误差区别何在?试加以分析说明。
图4—2 零件图3.在底板的边角上有一孔,要求位置度公差为Φ0.1mm,习题图4-3所示的四种标注方法,哪种标注方法正确?为什么另一些标注方法不正确?a)b)c)d)图4—3 零件图4.习题图4-4所示的零件,标注了两种不同的位置公差,它们的要求有何不同?a) b)图4—4 零件图第四章形状和位置公差及检测(二)一、判断题1.采用零形位公差,指在任何情况下被测要素的形位公差总是零。
()2.最大实体要求应用于被测要素又应用于基准要素时,公差值只能从被测要素或基准要素一处得到补偿。
()3.在满足功能要求的前提下,形位公差项目的选择应尽量选测量简单的项目。
()4.在保证关联作用尺寸不超越最大实体尺寸的场合下,最好在选择公差原则时选最大实体要求。
()5.国家标准对位置度公差值直接规定了具体等级和数值。
()6.国家标准对形位公差的未注公差值均未规定公差等级和数值。
()7.用与理想要素比较原则测量形位公差时,理想要素要绝对精确,不能用模拟法获得。
()8.用两点法测量圆度误差时,只能得到近似的测量结果。
()二、解答题1.试按习题图4-5的形位公差要求填写下表图4—5零件图2.某种零件表面的平面度公差为0.02mm,经实测,实际表面上的九点对测量基准的读数(单位为μm),如习题图4-6所示,问该表面的平面度误差是否合格?图4—6 零件平面度测得数据3.习题图4-7中的四种标注方法,分析说明它们所表示的要求有何不同(包括采用的形位公差原则,理想边界尺寸、允许的垂直度误差等)?a)b)c)d)图4—7 公差的标注。
《公差配合与测量技术》(笫二版)各章习题参考答案第一章 光滑圆柱的公差与配合习题1—10解:1)该配合用于对心与可拆卸,根据给出条件,x max ≯20μm,Y max ≯-20μm 可知 为过渡配合。
2)考虑到一般情况下应优先选用基孔制,该配合未提出其它要求,故选用基孔制。
3)求出配合公差 T f =|X max --Y max |=40μm查教材P14表1—2 IT6+IT7=13+21=34μm <40μm 故令孔选用IT7 轴选用IT64)确定孔、轴极限偏差并选定配合 ∵基准孔 EI=0 ES=+IT7=+21μm ∴X max =ES-ei=21-ei 设X max 暂按20代入则ei=21-20=1μmY max =EI-es=0-es 则es=0-(-20)=+20μm查表1—5 只有轴的基本偏差k 为ei=+2μm 与计算的值相接近,故选k ,对前 计算值重新修正: X max =ES-ei=21-2=19μm 显然,X max 仍小于20μm ,符合题意。
即:配合应为 Φ25H7∕k6 5)验算Φ25H7: ES=21μm EI=0μm Φ25k6: es=20μm ei=2μm X max =ES-ei=21-2μm=19μm Y max =EI-es=0-20μm =-20μm即: X max ≯20μm ,Y max ≯-20μm 符合题意。
习题 1—11解:1)确定基准制 因为一般情况,可选用基孔制 2)确定孔、轴公差等级由于 T f =︱X max -X min ︱=︱0.097-0.04︱=0.057mm=57μm查表1—2,与计算相接近的孔、轴公差等级为:IT6=22μm IT7=35μm 取孔公差等级为IT7(比轴低一级) 即 T D =35μm ∕轴公差等级为IT6 T d =22μm 则基准孔 ES=+35μm EI=03)计算热变形所引进的间隙变化量ΔX=95〔22×10-6(100-20)-22×10-6(150-20)〕=-0.1045㎜=-105μm 4)确定非基准件轴的基本偏差因基准孔 ES=35μm EI=0∵ X min =EI-es=40μm ∴es=- X min =-40μm ei=es-T d =-62μm 为了补偿热变形,在所计算的轴的上下偏差中加入补偿值ΔX ,即:es '=es +ΔΧ=-145μm ei '=ei +ΔΧ=-167μm故气缸孔的尺寸及偏差应为: Φ95035.00(mm )活塞的尺寸及偏差应为 : Φ95145.0167.0--(mm )习题1—17解:1)减速器属于一般机械,题意已明确采用P 0级精度2)查《现代综合机械设计手册》(中) 北京出版社 P1249页轴承内径 d=45mm 外径 D=75mm 宽 B=16mm 额定径向动负荷 C=21KN 实际径向动负荷为:1500N ∴P=1500∕21000=0.07 查表1-28 P <0.07C 应属于轻负荷3)查表1—24 轴承内孔与轴配合的公差带应为Φ45j6 ;查表1—25 轴承和外壳配合的公差带应为φ75H7 习题1—18解:1)参照教材P45各级精度应用的范围,应选择P0级2)已知该汽车所用前轴承的负荷为轻系列深沟球轴承,型号可选为:61810 3)该轴承内孔与轴的配合查表1—24,应选公差带为:Φ50j6;查表1—25与轴承配合的外壳孔公差带为:φ65J7第二章 测量技术基础习题2—23解:1)假设经过判断,不存在已定系统误差2)求出测量列算术平均值 X =10.01275㎜3)计算残差∑=121i νi=0 不存在未定系统误差4)计算测量列单次测量值的标准差S ≈1.865μm5)判断粗大误差3S=3×1.865μm=5.595μm由于测量列的各残差值皆小于3S ,故无粗大误差6)计算测量列总体算术平均值的标准偏差-xσ=nS =12865.1≈0.54μm7)计算测量列总体算术平均值的测量极限误差-)(x lim δ=±3-xσ=0.543⨯±μm=62.1±μm ≈1.6μm8)确定测量结果单次测量结果(第五次) X 5=10.014±3S=10.014±0.0056㎜算术平均值表示的测量结果 X C =-x ±3-xσ=10.±.0016㎜习题2—24解:1)如果只测量1次,则测量值20.020㎜为不定值(∵S=0),此时测量结果 为20.020±lim δ=20.020±0.005㎜ 即测量值可能为20.025~20.015㎜内的任何值。
第四章形状和位置公差与检测
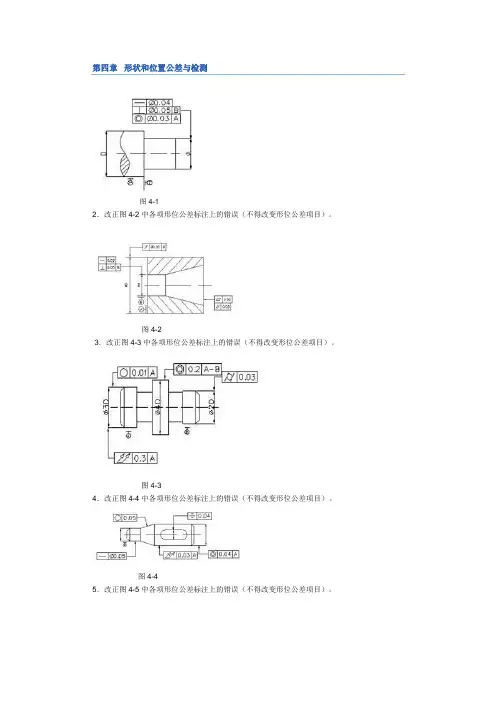
图4-1
2.改正图4-2中各项形位公差标注上的错误(不得改变形位公差项目)。
图4-2
3.改正图4-3中各项形位公差标注上的错误(不得改变形位公差项目)。
图4-3
4.改正图4-4中各项形位公差标注上的错误(不得改变形位公差项目)。
图4-4
5.改正图4-5中各项形位公差标注上的错误(不得改变形位公差项目)。
图4-5
6.将下列技术要求标注在图4-7上。
(1)φ100h6圆柱表面的圆度公差为0.005mm。
(2)φ100h6轴线对φ40P7孔轴线的同轴度公差为φ0.015mm。
(3)φ40P7孔的圆柱度公差为0.005mm。
(4)左端的凸台平面对φ40P7孔轴线的垂直度公差为0.01 mm。
(5)右凸台端面对左凸台端面的平行度公差为0.02 mm.
图4-6
7.将下列技术要求标注在图4-7。
(1)圆锥面的圆度公差为0.01 mm,圆锥素线直线度公差为0.02 mm。
(2)圆锥轴线对φd1和φd2两圆柱面公共轴线的同轴度为0.05 mm。
(3)端面Ⅰ对φd1和φd2两圆柱面公共轴线的端面圆跳动公差为0.03 mm。
(4)φd1和φd2圆柱面的圆柱度公差分别为0.008 mm和0.006 mm。
图4-7
8.将下列技术要求标注在图4-8上。
(1)左端面的平面度公差为0.01 mm,右端面对左端面的平行度公差为0.04 mm。
(2)φ70H7孔的轴线对左端面的垂直度公差为0.02mm。
(3)φ210h7轴线对φ70H7孔轴线的同轴度公差为φ0.03mm。
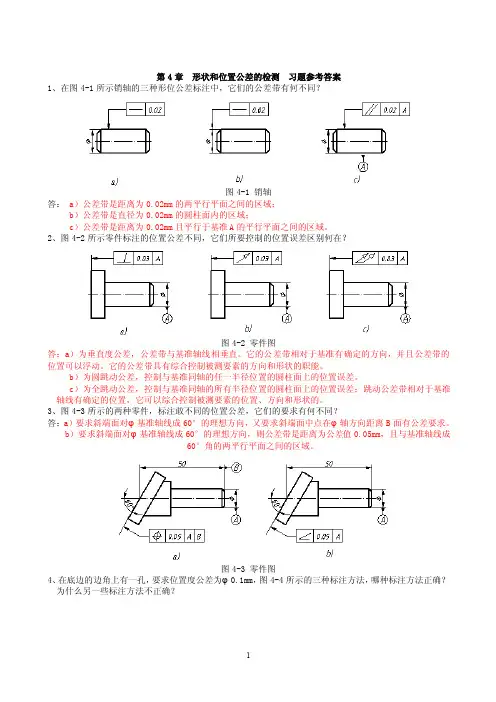
第4章形状和位置公差的检测习题参考答案1、在图4-1所示销轴的三种形位公差标注中,它们的公差带有何不同?图4-1 销轴答:a)公差带是距离为0.02mm的两平行平面之间的区域;b)公差带是直径为0.02mm的圆柱面内的区域;c)公差带是距离为0.02mm且平行于基准A的平行平面之间的区域。
2、图4-2所示零件标注的位置公差不同,它们所要控制的位置误差区别何在?图4-2 零件图答:a)为垂直度公差,公差带与基准轴线相垂直。
它的公差带相对于基准有确定的方向,并且公差带的位置可以浮动。
它的公差带具有综合控制被测要素的方向和形状的职能。
b)为圆跳动公差,控制与基准同轴的任一半径位置的圆柱面上的位置误差。
c)为全跳动公差,控制与基准同轴的所有半径位置的圆柱面上的位置误差;跳动公差带相对于基准轴线有确定的位置,它可以综合控制被测要素的位置、方向和形状的。
3、图4-3所示的两种零件,标注敢不同的位置公差,它们的要求有何不同?答:a)要求斜端面对φ基准轴线成60°的理想方向,又要求斜端面中点在φ轴方向距离B面有公差要求。
b)要求斜端面对φ基准轴线成60°的理想方向,则公差带是距离为公差值0.05mm,且与基准轴线成60°角的两平行平面之间的区域。
图4-3 零件图4、在底边的边角上有一孔,要求位置度公差为φ0.1mm,图4-4所示的三种标注方法,哪种标注方法正确?为什么另一些标注方法不正确?图4-4 零件图答:a)尺寸无公差而且也不是理论正确尺寸,无基准;b)基准符号标注位置不对;c)正确。
5、图4-5所示零件的技术要求是:⑴ 2×φd轴线对其公共轴线的同轴度公差为φ0.02mm;⑵φD轴线对2×φd公共轴线的垂直度公差为100:0.02;⑶φD轴线对2×φd公共轴线的偏离量不大于±10μm。
试用形位公差代号标出这些要求。
图4-5 零件图解:参考答案如图所示:图4-5 零件图参考答案6、图4-6所示零件的技术要求是:⑴法兰盘端面A对φ18H8孔的轴线的垂直度公差为0.015mm;⑵φ35圆周上均匀分布的4×φ8H8孔,要求以φ18H8孔的轴线和法兰盘端面A为基准以互换装配,位置度公差为φ0.05mm;⑶ 4×φ8H8四孔组中,有一个孔的轴线与φ4H8孔的轴线应在同一平面内,它的偏离量不大于±10μm。
第四章形状和位置公差与检测一、判断题1.采用包容要求时,基孔制配合中轴的上偏差数值即为该配合的最小间隙或最大过盈。
(对)2.用螺栓或螺钉连接的圆盘零件上圆周布置的通孔的位置度公差一般采用最大实体要求。
(对)3.某平面对基准平面的平行度误差为0. 05mm,那么这平面的平面度误差一定不大于0.05mm。
(对)4.某圆柱面的圆柱度公差为0.03 mm,那么该圆柱面对基准轴线的径向全跳动公差不小于0.03mm。
(错)5.采用包容要求时,基轴制配合中孔的上偏差数值即为该配合的最小间隙或最大过盈。
(错)6.圆度是形状公差,没有基准要素。
(对)7.被测要素为轴线时,形位公差符号的箭头可以直接指向该轴线。
(对)8.零件的尺寸精度与形位精度要求相差较大时,应采用独立原则。
(对)9.滚筒类零件的尺寸精度要求很低,形状精度要求较高,所以设计时应采用独立原则。
(对)10.一般来说,需要严格保证配合性质时,应采用包容要求。
(对)11.圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
(对)12.线轮廓度公差带是指包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线上。
(对)13.零件图样上规定Φd实际轴线相对于ΦD基准轴线的同轴度公差为Φ0.02mm。
这表明只要Φd实际轴线上各点分别相对于ΦD基准轴线的距离不超过0.02 mm,就能满足同轴度要求。
(错)14.若某轴的轴线直线度误差未超过直线度公差,则此轴的同轴度误差亦合格。
(错)15.基准符号指向基准要素时,无论基准符号在图面上的方向如何,其小圆圈中的字母都应水平书写。
(对)16.被测要素采用最大实体要求的零形位公差时,被测要素必须遵守最大实体边界。
(对)17.最小条件是指被测要素对基准要素的最大变动量为最小。
(错)18.按包容要求给出单一要素孔、轴的尺寸公差后,若要进一步给出形状公差值,则形状公差值必须小于给定的尺寸公差值。
(对)19.某实际要素存在形状误差,则一定存在位置误差。
第四章形状和位置公差及检测一、是非题(正确的在括号中画“√”,错误的画“×”)(每小题1分):1.()若某表面的平面度误差为0.02mm,则它对另一基准平面的平行度误差一定不小于0.02mm。
2.()除线轮廓度和面轮廓度外,其它形状公差带的位置都是浮动的。
3.()圆度的公差带形状是一个圆。
4.()当轴的端面对基准轴线有垂直度要求时,可以用全跳动公差来控制。
5.()图样上采用独立原则标注的同轴度公差值为φ0.06mm,加工后测得被测轴线上各点到基准轴线的最大偏移量为0.04mm,则此件的该项要求合格。
6.()同轴度误差实质上就是实际轴线对基准轴线的最大偏移量。
7.()在一定条件下,采用相关要求可以使相应要素的形位公差或(和)尺寸公差得到补偿。
8.()平面对基准平面的平行度误差为0.05,则该平面的平行度误差就一定不大于0.05。
9.()若轴线A对轴线B的同轴度公差为φ0.1mm,加工后零件轴线A上各点对轴线B距离的最大值为0.06mm,该同轴度误差合格10.()圆柱度公差是控制圆柱体零件纵向截面内形状误差的一项综合指标11.()某平面对基准平面的平行度误差为0.05mm,则该平面的平面度误差就一定不大于0.05mm。
12.()若测得实际被测轴线至基准轴线的最大偏移量为5μm,则该实际被测轴线相对其基准轴线的同轴度公差为10μm.13.()最大实体要求就是要求被测要素的实际表面遵守其最大实体边界的一种公差要求。
14.()包容要求主要用于尺寸公差与形状公差间无严格比例关系,保证配合性质的场合。
15.()最大实体要求主要用于相互配合的孔、轴能够保证自由装配的场合。
16.()只要尺寸公差和形位公差采用独立原则,肯定可以满足被测要素的功能要求。
17.()圆柱度误差是由圆度、直线度和相对素线的平行度误差综合形成的。
18.()圆柱度公差是由圆度、直线度和相对素线的平行度公差综合形成的。
19.( )端面对其轴线的垂直度公差带与端面全跳动公差带完全相同。
第4章形位公差1.属于形状公差的有AB。
A.圆柱度。
B.平面度。
C.同轴度。
D.圆跳动。
E.平行度。
2.属于位置公差的有ACD。
A.平行度。
B.平面度。
C.端面全跳动。
D.倾斜度。
E.圆度。
3.圆柱度公差可以同时控制AB。
A.圆度。
B.素线直线度。
C.径向全跳动。
D.同轴度。
E.轴线对端面的垂直度。
4.下列论述正确的有ABC。
A.给定方向上的线位置度公差值前应加注符号“Φ”。
B.空间中,点位置度公差值前应加注符号“SΦ”。
C.任意方向上线倾斜度公差值前应加注符号“Φ”。
D.标注斜向圆跳动时,指引线箭头应与轴线垂直。
E.标注圆锥面的圆度公差时,指引线箭头应指向圆锥轮廓面的垂直方向。
5.对于径向全跳动公差,下列论述正确的有BC。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与同轴度公差带形状相同。
E.当径向全跳动误差不超差时,圆柱度误差肯定也不超差。
6.形位公差带形状是半径差为公差值t的两圆柱面之间的区域有BD。
A.同轴度。
B.径向全跳动。
C.任意方向直线度。
D.圆柱度。
E.任意方向垂直度。
7.形位公差带形状是直径为公差值t的圆柱面内区域的有CDE。
A.径向全跳动。
B.端面全跳动。
C.同轴度。
D.任意方向线位置度。
E.任意方向线对线的平行度。
8.形位公差带形状是距离为公差值t的两平行平面内区域的有ACE。
A.平面度。
B.任意方向的线的直线度。
C.给定一个方向的线的倾斜度。
D.任意方向的线的位置度。
E.面对面的平行度。
9.对于端面全跳动公差,下列论述正确的有BCE。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与平行度控制效果相同。
E.与端面对轴线的垂直度公差带形状相同。
10.下列公差带形状相同的有BD。
A.轴线对轴线的平行度与面对面的平行度。
B.径向圆跳动与圆度。
C.同轴度与径向全跳动。
D.轴线对面的垂直度与轴线对面的倾斜度。
E.轴线的直线度与导轨的直线度mm○E则ADE。
11.某轴Φ10 0-0.015A.被测要素遵守MMC边界。