电机规格参数及曲线图
- 格式:doc
- 大小:678.00 KB
- 文档页数:1
步进电机——步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
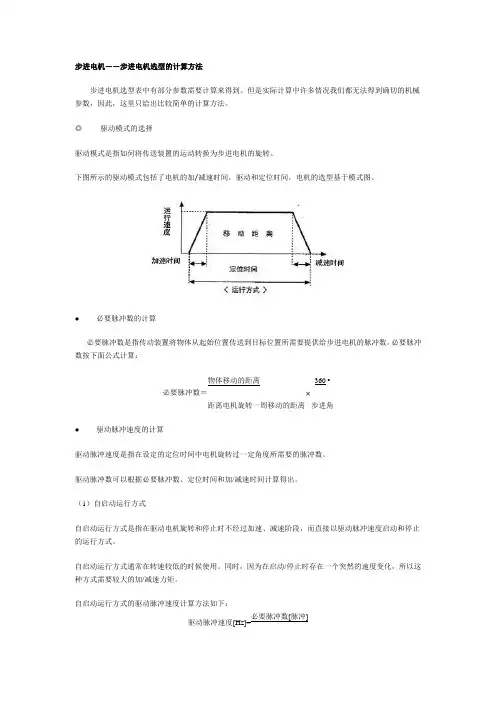
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o 步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
42步进电机是使用量最大的步进电机品种,性价比也很高,所以通常情况下,我们推荐优先考虑选用42步进电机,但如果选上的42步进电机的力矩不够,而尺寸空间又确定了,不能够选更大法兰尺寸的步进电机,有什么好的解决方案?维科特机电擅长给各位提供合理的解决方案。
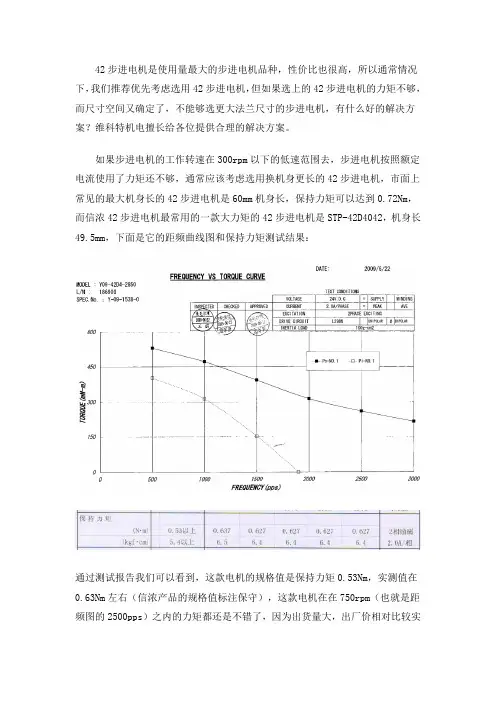
如果步进电机的工作转速在300rpm以下的低速范围去,步进电机按照额定电流使用了力矩还不够,通常应该考虑选用换机身更长的42步进电机,市面上常见的最大机身长的42步进电机是60mm机身长,保持力矩可以达到0.72Nm,而信浓42步进电机最常用的一款大力矩的42步进电机是STP-42D4042,机身长49.5mm,下面是它的距频曲线图和保持力矩测试结果:通过测试报告我们可以看到,这款电机的规格值是保持力矩0.53Nm,实测值在0.63Nm左右(信浓产品的规格值标注保守),这款电机在在750rpm(也就是距频图的2500pps)之内的力矩都还是不错了,因为出货量大,出厂价相对比较实惠,性价比高,可以优先选用。
但STP-42D4042力矩还是不够的话,再考虑60mm 机身长的42步进电机,但信浓没有这种机身长的42步进电机,可以选用维科特品牌的加长机身长的42步进电机。
如果42步进电机在比较高的速度下的力矩不够,可以考虑3个方面进行提高改进:选用电感小、电流大的步进电机;提高驱动电压;选用机身更长的42步进电机。
如果机身长度不变,只改变电感参数的匹配方案可以解决问题的话,通常是成本最低,最容易实现的解决方案。
提高驱动电压会提高电源功耗和成本,还看和系统电压是不是兼容,而加大机身长一般是成本最高的解决方案。
如果负载很大,即使选用60mm机身长的42步进电机力矩也不够,但空间尺寸有不允许选用57步进电机等这种更大尺寸的步进电机,怎么办?维科特机电可以给您提供薄型42减速步进电机来解决。
其中一款减速步进电机的尺寸图如下:这款机身长58.8mm的42减速步进电机保持力矩2.7Nm,比57步进电机力矩更大,如果需要尺寸更薄的42减速步进电机,可以做到机身长47.5mm保持力矩1.5Nm,就是一般42步进电机的机身长度。
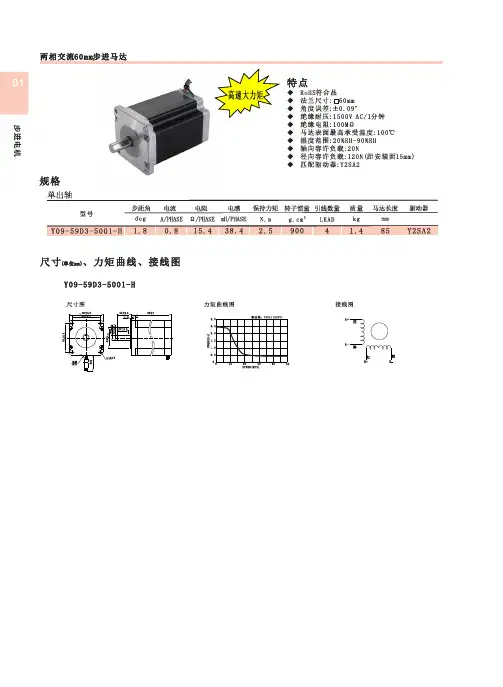
特点◆ 径向容许负载:90N(距安装面15mm)◆ RoHS 符合品◆ 安装孔距:47.14mm◆ 绝缘电阻:100MΩ◆ 匹配驱动器:Y2SD2◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:500V AC /1分钟◆ 角度误差:±0.09°◆ 轴向容许负载:20N◆ 法兰尺寸:□60mm规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟特点◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N◆ 径向容许负载:320N(距安装面20mm)◆ 湿度范围:20%RH-90%RH◆ RoHS 符合品◆ 匹配驱动器:Y2SD3 or Y2SA2◆ 法兰尺寸:□86mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
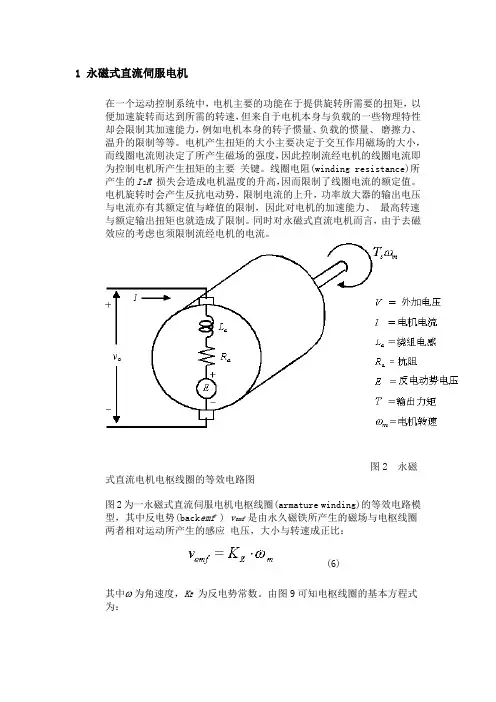
1 永磁式直流伺服电机在一个运动控制系统中,电机主要的功能在于提供旋转所需要的扭矩,以便加速旋转而达到所需的转速,但来自于电机本身与负载的一些物理特性却会限制其加速能力,例如电机本身的转子惯量、负载的惯量、磨擦力、温升的限制等等。
电机产生扭矩的大小主要决定于交互作用磁场的大小,而线圈电流则决定了所产生磁场的强度,因此控制流经电机的线圈电流即为控制电机所产生扭矩的主要关键。
线圈电阻(winding resistance)所产生的I2R损失会造成电机温度的升高,因而限制了线圈电流的额定值。
电机旋转时会产生反抗电动势,限制电流的上升,功率放大器的输出电压与电流亦有其额定值与峰值的限制,因此对电机的加速能力、最高转速与额定输出扭矩也就造成了限制。
同时对永磁式直流电机而言,由于去磁效应的考虑也须限制流经电机的电流。
图2 永磁式直流电机电枢线圈的等效电路图图2为一永磁式直流伺服电机电枢线圈(armature winding)的等效电路模型,其中反电势(back emf) v emf是由永久磁铁所产生的磁场与电枢线圈两者相对运动所产生的感应电压,大小与转速成正比:(6)其中 为角速度,K E为反电势常数。
由图9可知电枢线圈的基本方程式为:(7)i a为电枢电流。
永磁式直流伺服电机的电枢电流因为换向器(commutator)的设计使得电枢线圈所形成的磁场能与定子磁铁所形成的磁场保持垂直的关系而产生最大的扭矩,其扭矩方程式(torque equation)为:(8)其中T e为电机所产生的扭矩,K T为扭矩常数。
值得注意的是在MKS制时,。
当施以一直流电压于电机,在稳态时,因电流趋于定值,而可将(7)式简化为(9)图3 电机与负载的机械等效电路图大写字母表示其稳态的直流成份。
通常电机的电气时间常数(electrical time constant) τe= L a/R a远小于其机械时间常数 (mechanical time constant) τm,因此在分析其稳态额定状况时常加以忽略。

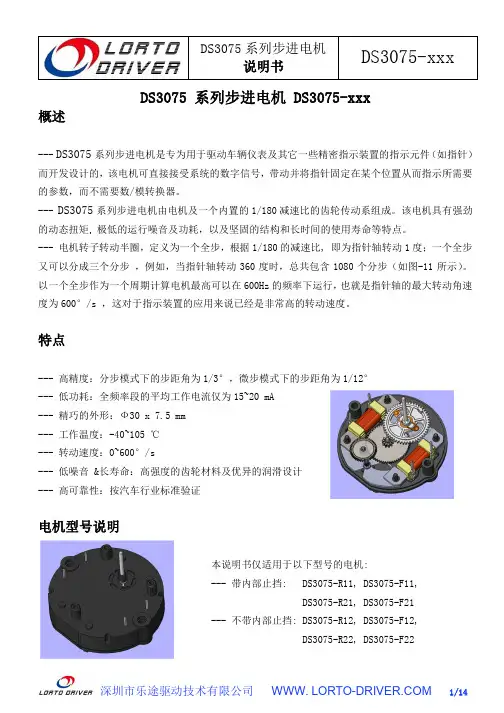
DS3075 系列步进电机 DS3075-xxx概述--- DS3075系列步进电机是专为用于驱动车辆仪表及其它一些精密指示装置的指示元件(如指针)而开发设计的,该电机可直接接受系统的数字信号,带动并将指针固定在某个位置从而指示所需要的参数,而不需要数/模转换器。
--- DS3075系列步进电机由电机及一个内置的1/180减速比的齿轮传动系组成。
该电机具有强劲的动态扭矩, 极低的运行噪音及功耗,以及坚固的结构和长时间的使用寿命等特点。
--- 电机转子转动半圈,定义为一个全步,根据1/180的减速比, 即为指针轴转动1度;一个全步又可以分成三个分步 ,例如,当指针轴转动360度时,总共包含1080个分步(如图-11所示)。
以一个全步作为一个周期计算电机最高可以在600Hz的频率下运行,也就是指针轴的最大转动角速度为600°/s ,这对于指示装置的应用来说已经是非常高的转动速度。
特点--- 高精度:分步模式下的步距角为1/3°,微步模式下的步距角为1/12°--- 低功耗:全频率段的平均工作电流仅为15~20 mA--- 精巧的外形:Ф30 x 7.5 mm--- 工作温度:-40~105 ℃--- 转动速度:0~600°/s--- 低噪音 &长寿命:高强度的齿轮材料及优异的润滑设计--- 高可靠性:按汽车行业标准验证电机型号说明本说明书仅适用于以下型号的电机:--- 带内部止挡: DS3075-R11, DS3075-F11,DS3075-R21, DS3075-F21--- 不带内部止挡: DS3075-R12, DS3075-F12,DS3075-R22, DS3075-F22表-1典型应用图-1 引脚连接图-2示意图DS3075-R11 DS3075-R12 DS3075-R21 DS3075-R22DS3075-F11 DS3075-F12 DS3075-F21 DS3075-F22机电特性表-2电机极限参数参数 符号 值 工作电压 U b10V抗静电电压 U ESD10,000V抗电磁干扰能力 (1KHz,AM80%,100KHz-2GHz) E 80V/m焊接温度 Ts 260℃表-3典型性能曲线(动态扭矩)图-3图-4图-5安装及尺寸电机安装--- DS3075系列步进电机可以很方便而牢固的通过不同的方法安装。
步进电机选型方法步进电机简介及选型方法如何选择合适的步进电机1. 负载分类:(1)Tf力矩负载:Tf = GrG 重物重量r 半径(2)TJ惯性负载:J = M(R12+R22)/ 32 (Kgcm)M:质量R1:外径R2:内径TJ = Jdw/dt dw/dt 为角加速度2.力矩曲线图的说明力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
步进电机简介及选型方法说明:1. 工作频率点:表示步进电机在该点的转速值。
单位:Hzn=Θ*Hz / (360*D)n 转/秒Hz 该点的频率值D 电路的细分值,Θ步进电机的步距角例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是1.25转/秒2. 起动区域:步进电机可以直接起动或停止的区域。
3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。
同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。
由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 加速和减速运动的控制当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
步进电机简介及选型方法(1)直线加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ,一般TJ =70% Tm。
电机学大作业-绘制同步电机V 型曲线————————————————————————————————作者:————————————————————————————————日期:电机学拓展练习——利用Matlab计算并绘制同步电机V型曲线学校:北京交通大学学院:电气工程学院学号:xxxxxxxx姓名:xxxxxxx指导老师:xxxxxxxxxx目录一.拓展内容 (3)二.详细设计 (3)2.1 设计背景和求作曲线思路 (3)2.2编写Matlab程序作V形图 (6)三.关于V形曲线的讨论 (8)四.心得体会 (8)五.参考文献 (9)一.拓展内容用Matlab计算并绘制同步电机V型曲线。
可以采用三维曲面的图形。
二.详细设计2.1 设计背景和求作曲线思路1)同步电机所处工作电网和工作模型:P n=50000kW,U n=13800V,电机参数:凸极同步电机R a=0,X d*=1.15,X q*=0.7,假定空载特性为一直线(既忽略饱和)。
2)了解V形曲线的定义:当同步电机并入大电网后,由于输出端电压为大电网的电压。
所以当发电机带感性负载时,电枢反应具有去磁作用,这时为了维持输出端电压恒定,就必须增大励磁电流,以补偿电枢反应的影响。
现在以凸极电机(为了和设计背景一样)展开讨论:假设不计饱和影响,电机电磁功率P em和输出功率P2均为恒定,端电压U 保持不变。
则有:P em=m E0Ux d sinθ+m U22(1X q−1X d)sin2θ=常数P2=mUI cosφ=常数即E0x d sinθ+U2(1X q−1X d)sin2θ=I cosφ=常数则由此可以分析励磁电流I f变化对电枢电流I的影响。
端电压和电磁功率恒定时的同步发电机向量图:由向量图可知同步电机并入大电网的无功功率调节依赖于励磁电流的变化。
当励磁电流I较大时,E01较高,定子电流I1滞后于端电压U,此时电机输出滞后无功功率,同步发电机处于过励状态;当逐步减小励磁电流I f,E0随之减小,至E02时,I2与U同向,cosφ=1,定子电流最小,这时为正常励磁;在减小If,定子电流I又开始增大,并超前电压U,如图E03和I3所示,发电机开始向电网输出超前的无功功率,这时发电机处于欠励状态,继续增大If,定子电流更大,当E0=E04时,θ=90,发电机达到稳定运行极限。
深圳市欧诺克科技有限公司Shenzhen ONKE Technology Co., Ltd.座机:*************27381841电话:邓先生135****7106陈先生139****0920邮箱:***************网 址 : 地址:广东省深圳市宝安区福海街道怀德翠湖工业园13栋稳定的质量是我们赖以生存的根本优质的服务是我们继续发展的前提客户的满意是我们唯一追求的目标产品画册Product gallery专业生产伺服驱动器、伺服电机及自动化控制系统深圳市欧诺克科技有限公司直流无刷电机目录匠心制造精益求精“一、公司介绍01二、直流无刷电机021.电机介绍与型号说明032.电机应用领域043.电机规格参数表054.电机规格尺寸图06C O M P A N Y PROFILE以精密制造引领未来Leading the future with precision manufacturing公司简介Company Profile深圳市欧诺克科技有限公司成立于2010年,是一家专业研发生产伺服电机和驱动器的高新技术企业,公司技术力量雄厚,检测手段先进,欧诺克人本着不求最全,只求最精的信念,为生产出各类伺服电机、各类驱动器而不懈奋斗。
欧诺克人以鹰的精神,挑战尖端,研发生产出高性价比的各类伺服电机和驱动器,以鹰的敏锐洞察力洞察市场,与时俱进、创新来满足市场的需求。
深圳市欧诺克科技有限公司产品主要有:伺服驱动器、伺服电机、直流伺服驱动器,直流伺服电机,交流伺服驱动器,交流伺服电机,低压伺服驱动器,低压伺服电机,直线电机驱动器,DDR马达驱动器,音圈电机驱动器,直流无刷驱动器,直流无刷电机,CANopen总线、EtherCAT总线、电子凸轮伺服系统,大功率伺服驱动器、大电流伺服驱动器,专用运动控制伺服驱动器和自动化控制系统,十多年来凭借精湛的技术与国内国外众多知名企业公司建立了互利共赢的合作。
公司不断研究和开发满足行业需求的各类伺服电机和驱动器,帮助客户提升品质和生产效率。
步进常识1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机分哪几种?步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。
这种步进电机的应用最为广泛。
3.什么是保持转矩(HOLDING TORQUE)?保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电机。
4.什么是DETENT TORQUE?(起动转扭)DETENT TORQUE 是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
5.步进电机精度为多少?是否累积?一般步进电机的精度为步进角的3-5%,且不累积。
6.步进电机的外表温度允许达到多少?步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。