PLC机械手的模拟控制梯形图
- 格式:doc
- 大小:195.50 KB
- 文档页数:9
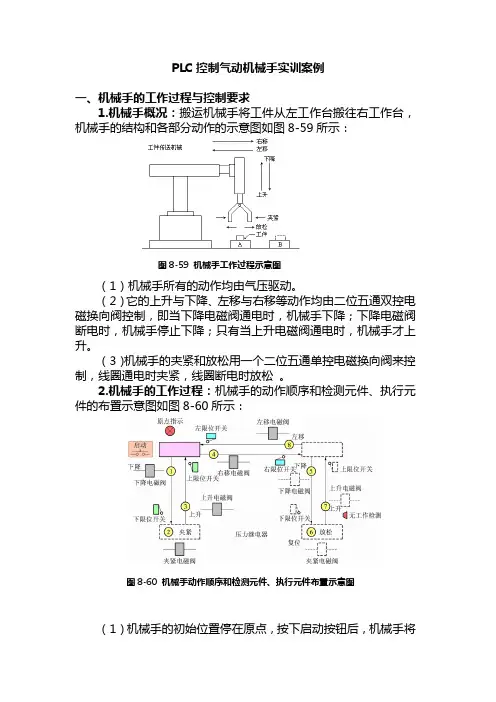
PLC控制气动机械手实训案例一、机械手的工作过程与控制要求1.机械手概况:搬运机械手将工件从左工作台搬往右工作台,机械手的结构和各部分动作的示意图如图8-59所示:图8-59 机械手工作过程示意图(1)机械手所有的动作均由气压驱动。
(2)它的上升与下降、左移与右移等动作均由二位五通双控电磁换向阀控制,即当下降电磁阀通电时,机械手下降;下降电磁阀断电时,机械手停止下降;只有当上升电磁阀通电时,机械手才上升。
(3)机械手的夹紧和放松用一个二位五通单控电磁换向阀来控制,线圈通电时夹紧,线圈断电时放松。
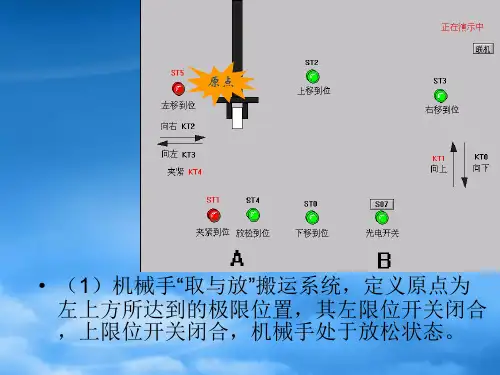
2.机械手的工作过程:机械手的动作顺序和检测元件、执行元件的布置示意图如图8-60所示:图8-60 机械手动作顺序和检测元件、执行元件布置示意图(1)机械手的初始位置停在原点,按下启动按钮后,机械手将依次完成下降—夹紧—上升—右移—再下降—放松—再上升—左移八个动作。
(2)机械手的下降、上升、右移、左移等动作的转换,是由相应的限位开关来控制的,而夹紧、放松动作的转换是由时间来控制的。
(3)为保证安全,机械手右移到位后,必须在右工作台上无工件时才能下降,若上一次搬到右工作台上工件尚未移走,机械手应自动暂时等待。
为此设置了一只光电开光,以检测“无工件”信号。
3.控制要求(1)手动工作方式:利用按钮对机械手每一动作单独进行控制。
例如,按“下降”按钮,机械手下降,按“上升”按钮,机械手上升。
用手动操作可以使机械手置于原位,还便于维修时机械手的调整;(2)单步工作方式:从原点开始,按照自动工作循环的步序,每按一下动按钮,机械手完成一步的动作后自动停止。
(3)单周期工作方式:按下启动按钮,从原点开始,机械手按工序自动完成一个周期的动作,返回原点后停止。
(4)连续工作方式:按下启动按钮,机械手从原点开始按工序自动反复连续循环工作,直到按下停止按钮,机械手自动停机。
或者将工作方式选择开关转换到“单周期”工作方式,此时机械手在完成最后一个周期的工作后,返回原点自动停机。
目录1.简介221.1课题概况221.2设计要求221.3设计内容22 2.系统总体方案设计332.1总体方案选择说明332.2控制方式选择332.3操作界面设计(其它图见附录)443.PLC控制系统的硬件设计443.1 PLC的选型443.2 I/O点数的估算553.3 I/O分配表553.4电气原理图设计553.5电气元件明细表554. PLC控制系统程序设计664.1 状态分配表664.2 机械手控制程序顺序功能图(或流程图)设计664.3 控制程序设计思路66 5.系统调试及结果分析11115.1 系统梯形图11115.2 结果分析15155.3调试过程中问题及解决方法1515 6.系统的使用说明书1515 7.课程设计体会1616 8.参考文献1616 9.附录17171.简介1.1课题概况一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成,当某个电磁阀线圈通电,就一致保持现有的机械动作,如果线圈断电则停止机械动作。
例如下降的电磁阀通电,机械手下降,如线圈断电,则停止现有的下降动作,直到通电后继续下降;当此电磁阀相反方向的线圈通电时则进行上升的机械动作。
另外夹紧/放松有单线圈二位电磁阀推动气缸完成,线圈通电执行加紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,启动按钮SB1、停止按钮SB2,SA1为单次工作和循环工作的选择开关,SA2为手动工作和自动工作选择开关。
启动按钮SB1按下后开始工作,有八个动作,如下所示:原位→下降→夹紧→上升→右移↑↓左移←上升←放松←下降1.2设计要求(1)初始状态:机械手运行前,处于原位状态。
(2)由SA2开关选择自动或手动工作。
自动工作有单次循环工作和重复循环工作两种流程;手动工作状态时,按下启动按钮,只能单步运行:按下启动按钮则运行一步,下一步运行需要再按一次启动按钮。
(3)启动操作:按下启动按钮SB1,机械手按如表所示的工作流程运行。
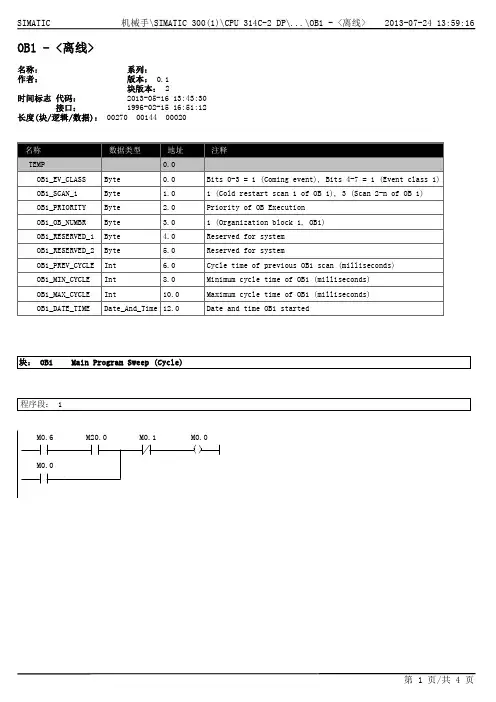
OB1 - <离线>""名称:系列:作者: 版本:0.1块版本:2时间标志代码:接口:2013-05-16 13:43:301996-02-15 16:51:12长度(块/逻辑/数据):00270 00144 00020 TEMP0.0 OB1_EV_CLASS Byte 0.0Bits 0-3 = 1 (Coming event), Bits 4-7 = 1 (Event class 1) OB1_SCAN_1Byte 1.0 1 (Cold restart scan 1 of OB 1), 3 (Scan 2-n of OB 1) OB1_PRIORITYByte 2.0Priority of OB Execution OB1_OB_NUMBR Byte 3.01 (Organization block 1, OB1) OB1_RESERVED_1 Byte 4.0Reserved for system OB1_RESERVED_2 Byte 5.0Reserved for system OB1_PREV_CYCLE Int 6.0Cycle time of previous OB1 scan (milliseconds) OB1_MIN_CYCLE Int 8.0Minimum cycle time of OB1 (milliseconds) OB1_MAX_CYCLE Int10.0Maximum cycle time of OB1 (milliseconds)OB1_DATE_TIME Date_And_Time 12.0Date and time OB1 started 块: OB1 "Main Program Sweep (Cycle)"程序段: 1M0.6M20.0M0.0M0.1M0.0M0.0I124.0"启动SB1"M0.6T2M0.1M0.2M0.1SQ124.0"机械手夹紧电磁阀Y"SDT1S5T#5S 程序段: 3M0.1T1M0.2M0.3M0.2Q124.1"机械手右行KM1"程序段: 4M0.2I124.2"右限位开关SQ2"M0.3M0.4M0.3Q124.4"冲头下降KM4"M0.3I124.4"下限位开关SQ4"M0.4M0.5M0.4Q124.3"冲头上升KM3"程序段: 6M0.4I124.3"上限位开关SQ3"M0.5M0.6M0.5Q124.2"机械手左行KM2"程序段: 7M0.5I124.1"左限位开关SQ1"M0.6M0.0M0.1M0.6RQ124.0"机械手夹紧电磁阀Y"SDT2S5T#20S程序停止I124.5"停止SB2"M20.0I124.0"启动SB1"M20.0。
机械手的PLC控制程序摘要本设计利用PLC控制程序调试,能够完成机械手的下降,夹紧,上升,右移,下降,松开,上升,左移等一系列的动作,完全符合现实工业生产的需要,经触摸屏模拟调试效果良好,其连续性运行或手动的操作都符合要求,整个程序符合自动化的生产的要求。
本文配有动作示意图,I/O分配表,I/O连接图,梯形图和触摸屏画面,同时有程序的详细分析。
关键词:机械手;自动化;可编程控制器PLC;触摸屏目录摘要 (1)1. 概述 (4)2. 控制要求 (4)2.1. I/O连接图 (5)2.2. 程序解释 (6)2.3. 完整梯形图如下所示 (11)2.4. 触摸屏画面 (14)3. PLC应注意的问题及解决方法 (15)3.1工作环境 (15)3.1.1 温度 (15)3.1.2 湿度 (15)3.1.3 震动 (15)3.2 空气 (15)3.3安装与布线 (16)3.4 外部安全 (16)3.5 PLC的接地 (16)4.结束语 (16)5.参考文献 (16)1.概述机电一体化在各个领域的应用,机械设备的自动控制成分显来越来越重要,大机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
本设计采用PLC作为控制机对工业机械手进行控制及监控。
它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸,从而大大改善工人的劳动条件,显著地提高劳动生产率工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
2.控制要求如图所示是一台机械手传送工件机械运动状态示意图,其作用是将工件从A点传递到B点。
机械手的初始置位停在原点,按下启动后按钮后,机械手将下降—夹紧工件延时2秒-上升-右移-再下降-放松工件延时2秒-再上升-左移完成一个工作周期。
机械手的下降、上升、右移、左移等动作转换,是由相应的动作开关来控制的,而夹紧和放松的转换是有时间来控制的气动机械手的升降和左右移行作分别由两个具有双线圈的两位电磁阀驱动气缸来完成,其中下降与上升对应电磁阀的线圈分别为YV3与YV1,右行、左行对应电磁阀的线圈分别为YV2与YV4。
S7-200 的搬运机械手的PLC 控制机械手是在机械化、自动化生产过程中发展起来的一种新型装置,它能模仿人手臂的某些动作功能,可按固定顺序在空间抓、放、搬运物体等,动作灵活多样,广泛应用在工业生产和其他领域内。
应用机械手可减少工人的重复操作,并能代替人类在危险与有毒性环境中工作,极大地提高了生产效率与工作精度,而且对保障人身安全,改善劳动环境,减轻劳动强度有着十分重要的意义。
可编程序控制器( PLC) 是从20 世纪60 年代末发展起来的一种新型的电气控制装置,它以微处理器为核心,将计算机技术、自动控制技术和通信技术融为一体,以其结构简单、易于编程、性能优越、可靠性高等显著优点而在工业控制领域得到了迅猛的发展,被广泛地应用于各种生产机械和生产过程的自动控制中。
德国西门子公司的PLC 产品在国内应用比较广泛,其中S7-200 系列PLC 以结构紧凑、高性价比、多种多样的CPU 尺寸以及基于Windows 的编程工具等特点在中、小规模控制系统中有独特的优势。
笔者选用西门子S7-200 为控制器,所研究的机械手采用水平/垂直位移加平面转动式结构。
机械手的全部动作由气缸驱动,PLC 控制相应的电磁阀驱动气动执行元件完成各动作。
这种控制系统能十分方便地嵌入到各类工业生产线中,完成零部件产品在固定位置之间的搬运,实现生产自动化。
1 控制功能分析机械手搬运零部件动作示意图如图1 所示,该机械手可用来将工件从左工作台搬到右工作台,其动作过程分为10 工步,即从原位开始顺序经过10个动作后完成一个周期,并返回原位。
该机械手能够抓取的工件质量m 为0. 1 kg,搬运物料过程中垂直方向加速度和水平方向加速度均为0. 3 g( g 为重力加速度) ,平面转动的回转半径r 为0. 5 m,转动角速度ω为3. 5 rad /s,角加速度β为2. 1 rad /s2,转动角度 为180°。
机械科学与技术第30 卷图1 机械手动作示意图其中为了使上升/下降、左移/右移和顺转/逆转动作能够执行,分别由3 个双线圈二位电磁阀控制气缸的动作。
第 1 章绪论1.1 选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械手已发展成为柔性制造系统FMS 和柔性制造单元FMC中一个重要组成部分。
把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械手的研究设计是非常有意义的。
1.2 设计目的本设计通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的数控机床上下料机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。
为了提高生产加工的工作效率降低成本并使生产线发展成为柔性制造系统适应现代自动化大生产针对具体生产工艺利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
江苏信息职业技术学院毕业设计报告毕业设计报告课题:机械手的PLC控制系部:机电系专业:电气自动化班级:电气1332姓名:王琪学号:2013321026指导老师:贾君贤2016-6摘要机械手是工业自动化系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、传感器、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC 输出三路脉冲,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:机械手 PLC 交流电机目录摘要 (1)引言 (3)第一章机械手机械结构 (4)1.1传动机构 (4)1.2机械手夹持器和机座的结构 (6)第二章机械手PLC及电机的应用 (8)2.1 PLC简介 (8)2.2 PLC内部原理 (10)2.3 机械手PLC选择及参数 (12)2.4 机械手电机的选用 (13)第三章机械手PLC控制系统设计 (14)3.1 机械手的工艺过程 (14)3.2PLC控制系统 (16)致答谢词 (21)参考文献 (21)引言在现代工业中,随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。
同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。
工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。
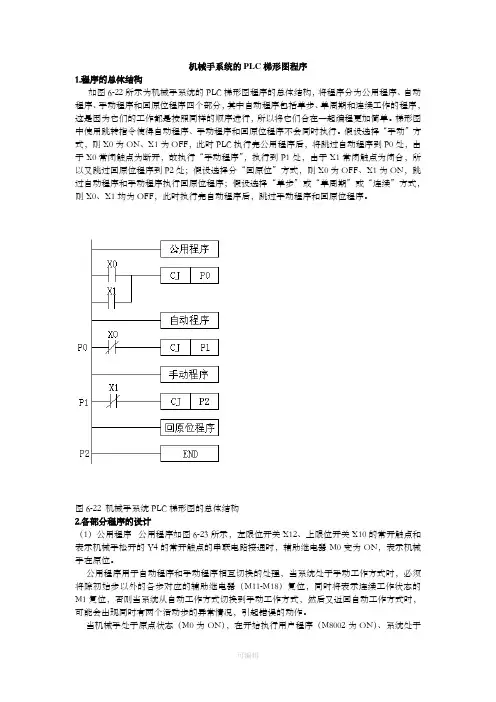
机械手系统的PLC梯形图程序1.程序的总体结构如图6-22所示为机械手系统的PLC梯形图程序的总体结构,将程序分为公用程序、自动程序、手动程序和回原位程序四个部分,其中自动程序包括单步、单周期和连续工作的程序,这是因为它们的工作都是按照同样的顺序进行,所以将它们合在一起编程更加简单。
梯形图中使用跳转指令使得自动程序、手动程序和回原位程序不会同时执行。
假设选择“手动”方式,则X0为ON、X1为OFF,此时PLC执行完公用程序后,将跳过自动程序到P0处,由于X0常闭触点为断开,故执行“手动程序”,执行到P1处,由于X1常闭触点为闭合,所以又跳过回原位程序到P2处;假设选择分“回原位”方式,则X0为OFF、X1为ON,跳过自动程序和手动程序执行回原位程序;假设选择“单步”或“单周期”或“连续”方式,则X0、X1均为OFF,此时执行完自动程序后,跳过手动程序和回原位程序。
图6-22 机械手系统PLC梯形图的总体结构2.各部分程序的设计(1)公用程序公用程序如图6-23所示,左限位开关X12、上限位开关X10的常开触点和表示机械手松开的Y4的常开触点的串联电路接通时,辅助继电器M0变为ON,表示机械手在原位。
公用程序用于自动程序和手动程序相互切换的处理,当系统处于手动工作方式时,必须将除初始步以外的各步对应的辅助继电器(M11-M18)复位,同时将表示连续工作状态的M1复位,否则当系统从自动工作方式切换到手动工作方式,然后又返回自动工作方式时,可能会出现同时有两个活动步的异常情况,引起错误的动作。
当机械手处于原点状态(M0为ON),在开始执行用户程序(M8002为ON)、系统处于手动状态或回原点状态(X0或X1为ON)时,初始步对应的M1O将被置位,为进入单步、单同期和连续工作方式作好准备。
如果此时M0为OFF状态,M1O将被复位,初始步为不活动步,系统不能在单步、单周期和连续工作方式下工作。
图6-23 公用程序(2)手动程序手动程序如图6-24所示,手动工作时用X14~X21对应的6个按钮控制机械手的上升、下降、左行、右行、松开和夹紧。
目录一、绪论1二、课题介绍 2三、设计内容及要求 31、设计要求32、控制要求3四、控制原理介绍及图示41、机械手动作的模拟实验面板图42、输入/输出接线列表43、控制过程4五、设计思想及程序框图5六、控制方案6方案一:1、工作过程分析62、梯形图73、梯形图指令8方案二:1、工作过程分析92、梯形图103、梯形图指令11七、硬件设计121、元器件选择122、元器件清单123、硬件控制原理图13八、运行调试14九、小结15十、参考文献16附录17一、绪论可编程序控制器(programmable controller),现在一般简称为PLC (programmable logic controller),它是以微处理器为基础,综合了计算机技术、半导体集成技术、自动控制技术、数字技术、通信网络技发展起来的一种通用的工业自动控制装置。
以其显著的优点在冶金、化工、交通、电力等领域获得了广泛的应用,成为了现代工业控制三大支柱之一。
在可编程序控制器问世以前,工业控制领域中是继电器控制占主导地位。
传统的继电器控制具有结构简单、易于掌握、价格便宜等优点,在工业生产中应用甚广。
但是控制装置体积大、动作速度较慢、耗电较多、功能少,特别是由于它靠硬件连线构成系统,接线繁杂,当生产工艺或控制对象改变时,原有的接线刻控制盘就必须随之改变或更换,通用性和灵活性较差。
PLC的应用领域非常广,并在迅速扩大,对于而今的PLC几乎可以说凡是需要控制系统存在的地方就需要PLC,尤其近几年来PLC的性价比不断提高已被广泛应用在冶金、机械、石油、化工、轻功、电力等各行业。
PLC 能在恶劣的环境如电磁干扰、电源电压波动、机械振动、温度变化等中可靠地工作,PLC的平均无故障间隔时间高,日本三菱公司的F1系列PLC平均无故障时间间隔长达30万h,这是一般微机所不能比拟的。
机械手通常应用于动作复杂的场合来代替人的反复的操作,从而节省人的劳动,普通继电器由于其体积和接口等各方面限制,经常被应用于动作简单的电气及流水线控制,而PLC以其可靠性高、抗干扰能力强;控制系统构成简单。
..毕业设计题目:机械手PLC控制系统设计摘要在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。
自从机械手问世以来,相应的各种难题迎刃而解。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
PLC机械手设计主要是依靠限位开关和电磁阀的控制及推动来实现的。
机械手的所有动作均采用电控制、气压驱动。
它的上升/下降、左移/右移和左旋转/右旋转均采用双线圈双位电磁阀推动气压缸完成。
机械手的动作转换依靠限位开关来控制并且按照一定的顺序动作。
在机械手运动的过程中会安装检测灯来检测其运动的启停。
本设计所用机械部件有模拟机械手爪,电气方面有可编程控制器(PLC)、开关电源、电磁阀、等部件。
按钮发出两路脉冲到机械手驱动,控制它的前后移动由气动阀Y4控制,左右移动由气动阀Y5控制,左右旋转由气动阀Y6控制,夹紧和放松由气动阀Y7控制,另外还有启动和停止两个按钮。
机械手自动完成全部动作。
【关键词】: 电磁阀限位开关继电器机械手Abstractin the industrial production and other fields,because the job needs,people are often under the threat of high temperature,corrosive and toxic gases and other factors,the increase in labor intensity,and even life-threatening.Sincethe advent of mechanical hand,be smoothly done or easily solved the corresponding problems.In space manipulator can be caught,put and carry objects,flexible,applicable to small batch production,production varieties can be switched,widely used in flexible automatic line.PLC design manipulator mainly rely on the limit switch and the solenoid valve control and promote them.The robot moves are all used electrical control,pneumatic drive.It's up / down,left / right shift and rotate left/right rotation using a double double coil solenoid valveto promote the completion of the cylinder pressure.The mechanical hand movements depend on the conversion limit switches to control the order and in accordance with a certain action.In the robot's movement in the process ofdetection lights will be installed to detect movement of its start and stop.The design of the mechanical components are used in simulation of mechanical hand,there are electric programmable logiccontroller(PLC),switching powersupply,electromagnetic valve,etc..A two button drive impulse to the robot,its control before and after moving from Y4 pneumatic valve control,move aroundby the Y5 pneumatic valve control,left and right rotation by the Y6 pneumatic valve control,clamping and relax by the Y7 pneumatic valve control,in addition to start and stop the two button.Automatic completion of all the action of manipulator.[keyword]:solenoid valve,limit switch relay manipulator第1章绪论1.1 PLC的发展及其应用PLC是一种专门在工业环境下应用而设计的数字运算操作的电子装置。
PLC课程设计题目: 机械手的PLC控制专业: 应用电子专业班级:学号:姓名:指导老师:引言在现代工业中,生产过程的机械化、自动化已成为突出的主题。
随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。
同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。
工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。
工业机械手是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。
尤其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。
在我国,近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。
本课题拟开发物料搬运机械手,采用日本三菱公司的FX2N系列PLC,对机械手的上下、左右以及抓取运动进行控制。
该装置机械部分有滚珠丝杠、滑轨、机械抓手等;电气方面由交流电机、变频器、操作台等部件组成。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
由于时间仓促和个人水平限制,我的设计存在着许多还没来得及解决的问题,希望广大老师、同学能够给予批评指正并予以解决。
第一节机械手机械结构1.1机械手夹持器和机座的结构1.机械手夹持器机械手的机械夹持器多为双指手抓式,按其手抓的运动方式可分为平移型和回转型。
回转型手抓有可分为单支点和双支点回转型,按夹持方式可以分为外夹式和内撑式。
按驱动方式可以电动、液压和气动三种。
回转型夹持器结构较简单,但当所夹持的工件直径有变动时,将引起工件轴心的偏移。
对平移型夹持器,工件直径的变化不影响其轴心的位置。
但其机械机构繁杂,体积大,制造精度要求高。
所以当设计机械手夹持器的时候,在满足工件的定位精度要求的条件下,尽可能的采用结构比较简单回转型夹持器。
机械手系统的PLC梯形图程序1、程序的总体结构如图6-22所示为机械手系统的PLC梯形图程序的总体结构,将程序分为公用程序、自动程序、手动程序与回原位程序四个部分,其中自动程序包括单步、单周期与连续工作的程序,这就是因为它们的工作都就是按照同样的顺序进行,所以将它们合在一起编程更加简单。
梯形图中使用跳转指令使得自动程序、手动程序与回原位程序不会同时执行。
假设选择“手动”方式,则X0为ON、X1为OFF,此时PLC执行完公用程序后,将跳过自动程序到P0处,由于X0常闭触点为断开,故执行“手动程序”,执行到P1处,由于X1常闭触点为闭合,所以又跳过回原位程序到P2处;假设选择分“回原位”方式,则X0为OFF、X1为ON,跳过自动程序与手动程序执行回原位程序;假设选择“单步”或“单周期”或“连续”方式,则X0、X1均为OFF,此时执行完自动程序后,跳过手动程序与回原位程序。
图6-22 机械手系统PLC梯形图的总体结构2、各部分程序的设计(1)公用程序公用程序如图6-23所示,左限位开关X12、上限位开关X10的常开触点与表示机械手松开的Y4的常开触点的串联电路接通时,辅助继电器M0变为ON,表示机械手在原位。
公用程序用于自动程序与手动程序相互切换的处理,当系统处于手动工作方式时,必须将除初始步以外的各步对应的辅助继电器(M11-M18)复位,同时将表示连续工作状态的M1复位,否则当系统从自动工作方式切换到手动工作方式,然后又返回自动工作方式时,可能会出现同时有两个活动步的异常情况,引起错误的动作。
当机械手处于原点状态(M0为ON),在开始执行用户程序(M8002为ON)、系统处于手动状态或回原点状态(X0或X1为ON)时,初始步对应的M1O将被置位,为进入单步、单同期与连续工作方式作好准备。
如果此时M0为OFF状态,M1O将被复位,初始步为不活动步,系统不能在单步、单周期与连续工作方式下工作。
图6-23 公用程序(2)手动程序手动程序如图6-24所示,手动工作时用X14~X21对应的6个按钮控制机械手的上升、下降、左行、右行、松开与夹紧。
江苏信息职业技术学院毕业设计报告毕业设计报告课题:机械手的PLC控制系部:机电系专业:电气自动化班级:电气1332姓名:王琪学号:2013321026指导老师:贾君贤2016-6摘要机械手是工业自动化系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、传感器、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC 输出三路脉冲,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:机械手 PLC 交流电机目录摘要 (1)引言 (3)第一章机械手机械结构 (4)1.1传动机构 (4)1.2机械手夹持器和机座的结构 (6)第二章机械手PLC及电机的应用 (8)2.1 PLC简介 (8)2.2 PLC内部原理 (10)2.3 机械手PLC选择及参数 (12)2.4 机械手电机的选用 (13)第三章机械手PLC控制系统设计 (14)3.1 机械手的工艺过程 (14)3.2PLC控制系统 (16)致答谢词 (21)参考文献 (21)引言在现代工业中,随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。
同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。
工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。
目录一、摘要 (1)二、控制要求 (2)三、控制原理介绍及图示 (3)1、机械手动作的模拟实验面板图 (3)2、输入/输出接线列表 (3)3、控制过程 (3)四、控制方案 (5)1、工作过程分析 (5)2、梯形图 (6)五、运行调试 (9)六、小结 (10)七、参考文献 (11)一、摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及。
机械手:mechanical hand,也被称为自动手,auto hand能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。
有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。
机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
就个人而言,希望通过这次毕业设计对未来将从事的工作进行一次适应训练,从中锻炼自己分析问题、解决问题的能力,为今后的工作打下一个良好的基础。
PLC机械手的模拟控制梯形图
实验四机械手的模拟控制
一、实验目的
用PLC构成机械手控制系统
二、实验内容
1.控制要求
按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2s 后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。
上升到位后,传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开循环。
2.I/O分配
输入输出
起动按钮:X0 上升YV1:Y1
停止按钮:X5 下降YV2:Y2
上升限位SQ1:X1 左转YV3:Y3
下降限位SQ2:X2 右转YV4:Y4
左转限位SQ3:X3 夹紧YV5:Y5
右转限位SQ4:X4 传送带A:Y6
光电开关PS:X6 传送带B:Y7
机械手控制示意图3.机械手控制梯形图。
4.指令表。
5.调试并运行程序。
机械手控制梯形图。