PLC机械手动作的模拟
- 格式:docx
- 大小:37.57 KB
- 文档页数:9
基于plc仿机器人指令实现机械手示教功能方法在撰写文章之前,首先我想对您指定的主题进行一些全面评估和思考。
PLC(可编程逻辑控制器)是一种常见的工业控制设备,而机器人指令和机械手示教功能方法是与自动化生产密切相关的技术。
本文将以深度和广度兼具的方式来探讨如何基于PLC仿真机器人指令实现机械手示教功能方法。
1. 了解PLC的基本原理和工作方式- 介绍PLC的结构和功能- 讨论PLC在工业控制中的应用- 分析PLC与机器人指令的关联性2. 分析机器人指令的特点和功能- 探讨常见的机器人指令集- 解释机器人指令的工作原理- 讨论机器人指令在自动化生产中的重要性3. 讨论机械手示教功能方法及其在制造业中的应用- 介绍机械手示教的概念和原理- 分析机械手示教在工业生产中的作用- 探讨机械手示教方法的发展趋势和应用前景4. 探讨基于PLC仿真机器人指令实现机械手示教功能的方法- 分析使用PLC模拟机器人指令的可行性- 讨论基于PLC的机械手示教方法的优势和局限性- 探讨如何结合PLC和机械手示教功能进行自动化生产5. 分享个人观点和理解- 总结本文讨论的内容- 提出对基于PLC仿真机器人指令实现机械手示教功能方法的见解与建议根据上述思路,我将开始撰写一篇关于基于PLC仿机器人指令实现机械手示教功能方法的文章,以便深入了解并全面理解该主题。
在撰写过程中,请多次提及您指定的主题文字,并在文章中加入总结回顾性的内容。
文章将按照知识的文章格式进行布局,确保结构清晰、内容丰富。
文章总字数将超过3000字,并且不会出现字数统计,以确保其质量和深度。
PLC(可编程逻辑控制器)作为一种常见的工业控制设备,其基本原理和工作方式是我们深入学习和了解的重点。
在本节中,我们将更深入地探讨PLC的结构和功能,以及它在工业控制中的应用,并分析其与机器人指令的关联性。
让我们来了解一下PLC的基本原理和工作方式。
PLC是一种数字化的、专用的微处理器,主要用于工业领域的控制系统,它可以根据预先设定的程序执行各种各样的控制功能。
简易机械手PLC控制简介在制造业中,机械手是一种关键的工业自动化设备,用于处理和搬运物品。
机械手的控制非常重要,它决定了机械手的精度和效率。
PLC (可编程逻辑控制器)是一种常用的控制设备,它可以编程来控制机械手的运动和动作。
本文将介绍如何使用PLC控制一个简易机械手的运动。
所需硬件和软件•一台简易机械手•一个PLC设备•一个用于编程的PLC软件步骤步骤一:连接PLC设备和机械手首先,将PLC设备连接到机械手控制器上。
确保连接正确,以便PLC能够发送指令给机械手控制器。
步骤二:安装PLC软件并编程在电脑上安装PLC软件,并启动软件。
创建一个新的项目,并选择适当的PLC类型和通信配置。
然后,开始编程。
步骤三:设置输入输出(IO)点在PLC软件中,设置适当的输入输出(IO)点,以接受和发送信号。
例如,设置一个输入点来接收机械手的位置信号,以便PLC可以确定机械手的当前位置。
同时,设置一个输出点来发送控制信号给机械手,以控制它的动作。
步骤四:编写程序逻辑使用PLC软件编写机械手的控制程序。
根据机械手的需求,编写逻辑来控制机械手的运动和动作。
例如,如果机械手需要抓取一个物体并将其放置到另一个位置,那么编程逻辑应该包括机械手的移动和抓取指令。
确保编写的逻辑合理且有效。
步骤五:测试和调试在PLC软件中,模拟机械手的动作并进行测试。
确保PLC能够正确地控制机械手的运动。
如果发现错误或问题,进行调试并修正程序逻辑。
步骤六:上传程序到PLC当测试和调试完成后,将编写的程序上传到PLC设备中。
确保上传的程序可以在PLC上正确运行。
步骤七:运行机械手一切准备就绪后,运行机械手。
PLC将根据编写的逻辑控制机械手的运动和动作。
结论使用PLC控制机械手是一种常见的工业自动化方法。
通过编写合理的程序逻辑,PLC可以控制机械手的运动和动作,提高生产效率和精度。
希望本文能够帮助读者了解如何使用PLC控制简易机械手。
PLC课程设计机械手的模拟控制组员:高真齐侯毛威学号:13150204271315020423指导教师:徐承韬2016年5月27日引言在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。
也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。
工业机械手机器人的一个重要分支。
可编程逻辑控制器,即PLC,是一种采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
而本次设计,就是利用可编程逻辑控制器设计机械手的动作模拟控制。
关键词:机械手PLC 可编程逻辑控制器目录PLC课程设计 (1)引言 (2)一:设计任务书 (5)1.1 控制要求 (5)1.2设计要求 (5)二:硬件电路设计和描述 (6)2.1. I/O分配 (6)2.2 PLC外围接线图 (7)三:软件设计流程及描述 (8)3.1 流程图 (8)3.2 功能图 (9)3.3 工作方式 (9)四:PLC控制程序 (10)4.1 梯形图 (10)4.2 梯形图说明 (14)4.3 I/O 分配表 (15)五.设计心得 (16)参考文献 (18)一:设计任务书1.1 控制要求按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2s后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。
上升到位后,传送带B 开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才停止……循环1.2设计要求1) 根据控制要求,进行机械手的模拟控制硬件电路设计,包括主电路、控制电路及PLC硬件配置电路。
课程设计报告课程名称:电气控制与PLC应用技术姓名:班级:学号:指导教师:完成日期:目录一:课题简介 (3)二:系统控制要求 (4)三:系统总体控制方案说明 (4)四:系统的电器原理图 (5)五:PLC的选择 (6)六:PLC的输入输出分配表 (7)七:PLC状态分配表 (8)八:系统的梯形图 (9)九:使用说明 (20)十:调试说明 (21)十一:小结 (22)十二:参考文献 (22)附录 (23)一:课题简介1)课题题目:机械手模拟控制2)控制系统概况如图所示,一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动汽缸完成,当某个电磁阀线圈通电,就一致保持现有的机械动作,如果线圈断电则停止机械动作,例如下降的电磁阀线圈通电,机械手下降,如线圈断电,则停止现有的下降动作,直到通电后继续下降;当此电磁阀相反方向的线圈通电时则进行上升的机械动作。
另外,加紧/放松由单线圈二位电磁阀推动汽缸完成,线圈通电执行加紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关(见下图),启动按钮SB1、停止按钮SB2,SA1为单次工作和循环工作的选择开关,SA2为手动工作和自动工作选择开关。
启动按钮SB1按下后开始工作,有八个动作,如下所示:原味→下降→夹紧→上升→右移↑↓左移← 上升← 放松← 下降二:系统控制要求1)控制要求1.初始状态:机械手运行前,处于原状态。
2.由SA2开关选择自动或手动工作。
自动工作有单次循环工作和重复循环工作两种流程;手动工作状态时,按下启动按钮,只能单步运行:按下启动按钮则运行一步,下一步运行需要再按一次启动按钮。
3.启动操作:按下启动按钮SB1。
机械手如表所示的工作流程运行。
4.停止操作:按下停止按钮SB2后,立即停止运行,按下启动按钮SB1又能继续运行。
三:系统总体控制方案说明机械手运作的6个动作分3组,即上升/下降、左移/右移和放松/夹紧。
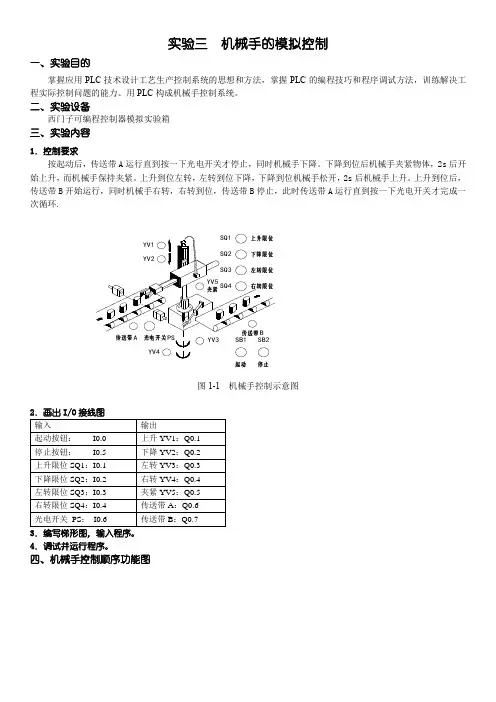
实验三机械手的模拟控制
一、实验目的
掌握应用PLC技术设计工艺生产控制系统的思想和方法,掌握PLC的编程技巧和程序调试方法,训练解决工程实际控制问题的能力。
用PLC构成机械手控制系统。
二、实验设备
西门子可编程控制器模拟实验箱
三、实验内容
1.控制要求
按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2s后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。
上升到位后,传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才完成一次循环.
图1-1 机械手控制示意图
2.画出I/O接线图
3.编写梯形图,输入程序。
4.调试并运行程序。
四、机械手控制顺序功能图
五、机械手控制梯形图。
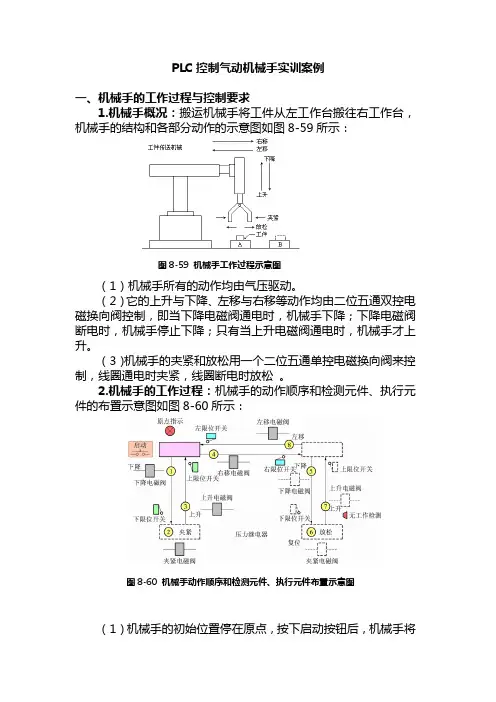
PLC控制气动机械手实训案例一、机械手的工作过程与控制要求1.机械手概况:搬运机械手将工件从左工作台搬往右工作台,机械手的结构和各部分动作的示意图如图8-59所示:图8-59 机械手工作过程示意图(1)机械手所有的动作均由气压驱动。
(2)它的上升与下降、左移与右移等动作均由二位五通双控电磁换向阀控制,即当下降电磁阀通电时,机械手下降;下降电磁阀断电时,机械手停止下降;只有当上升电磁阀通电时,机械手才上升。
(3)机械手的夹紧和放松用一个二位五通单控电磁换向阀来控制,线圈通电时夹紧,线圈断电时放松。
2.机械手的工作过程:机械手的动作顺序和检测元件、执行元件的布置示意图如图8-60所示:图8-60 机械手动作顺序和检测元件、执行元件布置示意图(1)机械手的初始位置停在原点,按下启动按钮后,机械手将依次完成下降—夹紧—上升—右移—再下降—放松—再上升—左移八个动作。
(2)机械手的下降、上升、右移、左移等动作的转换,是由相应的限位开关来控制的,而夹紧、放松动作的转换是由时间来控制的。
(3)为保证安全,机械手右移到位后,必须在右工作台上无工件时才能下降,若上一次搬到右工作台上工件尚未移走,机械手应自动暂时等待。
为此设置了一只光电开光,以检测“无工件”信号。
3.控制要求(1)手动工作方式:利用按钮对机械手每一动作单独进行控制。
例如,按“下降”按钮,机械手下降,按“上升”按钮,机械手上升。
用手动操作可以使机械手置于原位,还便于维修时机械手的调整;(2)单步工作方式:从原点开始,按照自动工作循环的步序,每按一下动按钮,机械手完成一步的动作后自动停止。
(3)单周期工作方式:按下启动按钮,从原点开始,机械手按工序自动完成一个周期的动作,返回原点后停止。
(4)连续工作方式:按下启动按钮,机械手从原点开始按工序自动反复连续循环工作,直到按下停止按钮,机械手自动停机。
或者将工作方式选择开关转换到“单周期”工作方式,此时机械手在完成最后一个周期的工作后,返回原点自动停机。
机电传动控制技术实验报告班级姓名学号同组人员二零一六年十二月实验四机械手的模拟控制一、实验目的用PLC构成机械手控制系统二、实验设备1、PLC实验箱一台;2、PLC编程环境与编辑软件一套。
三、实验要求1、控制要求按启动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2S后开始上升,而机械手保持夹紧。
上升到位左转,左转到位后下降,下降到位机械手松开,2S后机械手上升,上升到位后。
传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才停止,……循环。
2 、I/O分配(连线)3、输入程序代码(梯形图或助记符)四、实验步骤1、把PLC自身的接线端子O/0、O/1、O/2、O/3、O/4,O/5、O/6、O/7分别与机械手模拟控制实验上的1、2、3、4、5、6、A、B接线柱相连,I/0、I/1分别与M1(起动)、M2(停止)相连。
2、把PLC主控制器旁24V的COM端接到此模拟实验的COM端上,旁边的+5V端接到此模拟实验的+5V端,PLC输出端所用到的COM口相互并联后再接到5V的GND端。
3、输入程序检查无误后运行程序。
(程序见配套光盘机械手文件)4、程序说明:机械手把工件从A点移到B点。
实际机械手设备上装有上、下限位和左、右限位开关。
机械手起先处于原点,当按下起动按钮后:①机械手下降(1灯亮),工作钳处于放松状态(5灯亮),工件A亮表示有工件需要移到B点;②下降2秒后,工作钳碰到下限位开关并刚好到达工件A位置,工作钳夹紧(1、5灯不亮、2灯亮),延时1.5秒;③机械手上升(A灯不亮、3灯亮);④上升2秒后,碰到上限位开关,停止上升并开始往右移(3灯不亮、4灯亮);⑤机械手右移2秒后刚好碰到右限位开关停止右移并开始下降(4灯不亮、1灯);⑥下降2秒后碰到下限位开关并刚好在工件B位置,工作钳放松(1、2灯不亮,5、B灯亮);延时1.5秒;⑦机械手上升2秒(3灯亮);⑧碰到上限位开关后往左移2秒(3灯不亮、6灯亮),到达原位碰到左限开关(6、B灯不亮),一个工作周期完成。
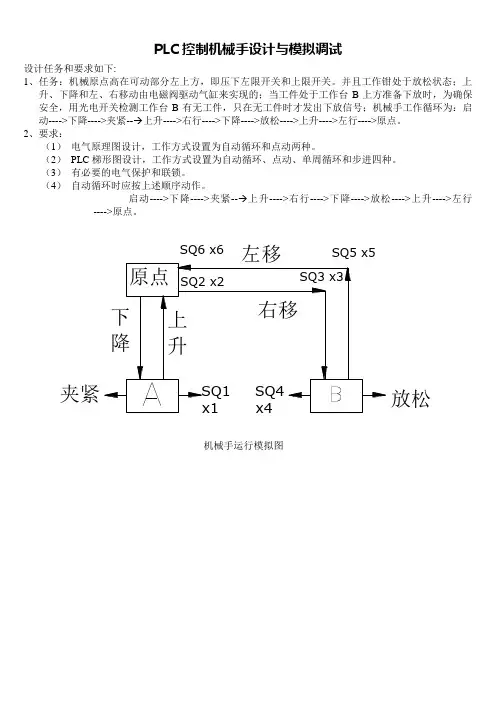
PLC 控制机械手设计与模拟调试设计任务和要求如下:1、任务:机械原点高在可动部分左上方,即压下左限开关和上限开关。
并且工作钳处于放松状态;上升、下降和左、右移动由电磁阀驱动气缸来实现的;当工件处于工作台B 上方准备下放时,为确保安全,用光电开关检测工作台B 有无工件,只在无工件时才发出下放信号;机械手工作循环为:启动---->下降---->夹紧--→上升---->右行---->下降---->放松---->上升---->左行---->原点。
2、要求:(1) 电气原理图设计,工作方式设置为自动循环和点动两种。
(2) PLC 梯形图设计,工作方式设置为自动循环、点动、单周循环和步进四种。
(3) 有必要的电气保护和联锁。
(4) 自动循环时应按上述顺序动作。
启动---->下降---->夹紧--→上升---->右行---->下降---->放松---->上升---->左行---->原点。
夹紧放松SQ5 x5SQ6 x6机械手运行模拟图I/O接线图自动起动停止手动单步单周回原点连续回原点起动手动上升手动下降手动左移手动右移手动放松手动夹紧左限位右上限位右下限位右限位左上限位左下限位I/O分配表梯形图(1)回原点方式按住X21,按一下X25→ Y0断电,停止下降;Y2通电,上升;→上升到位即压下X5→Y3断电,停止右移;Y4通电,左移→左移到位即压下X6 →停止。
(2)手动方式按住X20,原位(按X2、X6),①按X14→ Y0通电,下降→下降到位即压下X1→Y0断电,停止下降;松开X14,②按X10→Y1通电,夹紧;松开X10,③按X15 → Y2通电,上升(Y1保持通电,保持夹紧)→上升到位即压下X2→Y2断电,停止上升;松开X15,④按X12→ Y3通电,右移(Y1保持通电,保持夹紧)→右移到位即压下X3→松开X12,B处无工件,即按下X0,⑤按X14→ Y0通电,下降→下降到位即压下X4→Y0断电,停止下降;松开X14,⑥按X11→Y1断电,放松;松开X11,⑦按X15 → Y2通电,上升→上升到位即压下X5→Y2断电,停止上升;松开X15,⑧按X13→ Y4通电,左移→左移到位即压下X6→Y4断电,停止。
摘要随着人类科技的进步,社会经济的进展,机械手的应用领域也在不断的扩大。
在人类社会中,凡是有人类活动的地方,都能看到机械手的身影。
机械手产品的应用已经由海洋开发和宇宙探测等高端科学领域向建筑、挖掘甚至是服务娱乐等民用领域进展了,并且各式各样的机械手正在涌现出来,以惊人的速度延伸到人类活动的各个领域。
机械手是由于人类生产水平的进展,产品生产质量和生产率的提高而出现的。
论文的主要是基于小型PLC的机械手运动控制系统设计,本文中机械手涉及八个动作过程,依次是下降、夹紧、上升、右移、下降、松开、上升、左移。
在程序设计时,选用西门子S7-200型PLC,将通过V4.0STEP7 MicroWIN SP6PLC编程软件来对其工作过程进行编程设计,为了提高机械手的可操作性,还将加入机械手人机界面设计,通过触摸屏来对机械手进行操作,人机界面能更加直观便利的对机械手的运动过程进行控制和实时监控,使用SIMATIC WinCC flexible 2007人机界面软件来对机械手人机界面进行设计,使用PLC编程控制器和人机界面一起对工业机械手的运动过程进行控制。
关键词:机械手;PLC;组态模拟AbstractWith the progress of human science and technology, the development of social economy, the field of application of mechanical hand is also expanding. In the human society, where there is a place for human activities, can see the figure of the robot hand. The application of manipulator has by the ocean exploitation and exploration of the universe and other high-end science to construction, mining and entertainment services, and other civilian areas of development and all kinds of mechanical hand is emerging. With amazing speed extends to all areas of human activity. Manipulator is due to the development of human production level, product quality and productivity of the emergence of the increase. The main is based on Small PLC manipulator movement control system design, the mechanical hand involves eight action process, followed by decline in clamping, rising, shifted to the right, down, loosen, up, left shift. In the program design, selection of Siemens S7-200 PLC, will by v4.0 step 7 microwin SP6PLC programming software and the working process of programming design, in order to improve the manipulator operation. Will also join the manipulator man-machine interface design, through the touch screen to the manipulator into operation, the man-machine interface can more intuitive and convenient of the manipulator motion process of control and real-time monitoring, the 2007 man-machine interface software to manipulator man-machine interface design using SIMATIC WinCC flexible, together to industrial machinery hand movement process control using PLC and man-machine interface.Key words: manipulator; PLC; configuration simulation目录1.1研究背景及意义 (1)1.2研究现状 (1)第2章相关概述 (2)2.1机械手 (2)2.2机械手的基本结构及机械手的种类 (3)2.3机械手的整体结构 (4)2.4 PLC技术简介 (5)第3章机械手PLC控制系统设计 (7)3.1机械手各部件的设计 (7)3.1.1机械手手爪结构设计 (7)3.1.2机械手手腕结构设计 (7)3.1.3机械手手臂结构设计 (8)3.1.4机械手的机械传动机构设计 (9)3.1.5机械手手臂的平衡机构设计.............................. (9)3.2机械手控制程序设计 (9)3.2.1 PLC的应用设计步骤 (9)3.2.2控制系统PLC选型 (10)3.2.3 PLC控制器程序设计 (10)第4章机械手监控系统设计 (15)4.1组态软件简介 (15)4.1.1组态软件 (15)4.1.2组态王 (16)4.2 监控系统设计 (17)4.2.1监控界面 (17)4.2.2监控设计 (17)第5章结论与展望 (22)5.1机械手设计时应考虑的几个问题 (22)5.2展望 (23)致谢 (25)参考文献 (26)第1章绪论1.1研究背景及意义机械手技术设计的学科相当广泛,其一,它能部分的代替人工操作;其二,它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工作的传送和装卸;其三,它能操作必要的机具进行焊接和装配,从而的改善了工人的劳动条件,显著的提高了生产率,加快实现工业生产机械化和自动化的步伐,我国近几年也有较快的进展,并且取得一定的效果。
一、实验内容机械手未工作时处于初始位置右上方。
按下起动按钮SB1,汽缸B立即工作向下伸长,到达下方限位开关位置后,汽缸C开始工作抓紧物体M,抓紧后汽缸B停止工作向上缩回,到达上方限位开关位置后,汽缸A开始工作向左伸长,到达左方限位开关位置后,汽缸B 工作向下伸长,到达下方限位开关位置后,汽缸C停止工作松开物体M,确认松开后汽缸B 停止工作向上缩回,到达上限位开关位置后汽缸A停止工作向右缩回,到达右限位开关位置后汽缸B工作向下伸长,不断重复上述操作直到按下停止按钮SB2,汽缸ABC全部停止工作,机械手回到初始位置右上方。
二、硬件分析1.输入启动、停止操作需2个DI点;模拟机械手上、下、左、右四个位置以及机械手是否夹住物体M的限位开关,需五个DI点;因此一共需要7个DI点。
2.输出模拟汽缸A、B、C工作需3个DO;指示机械手所在位置及其是否夹紧需要5个DO点;因此一共需要8个DO点。
三、地址分配1.数字量输入DII0.0启动按钮SB1I0.1限位按钮LS1I0.2限位按钮LS2I0.3限位按钮LS3I0.4限位按钮LS4I0.5限位按钮LS6I0.6停止按钮SB22.数字量输出DOQ0.0状态指示灯LED 9Q0.1位置指示灯LED1Q0.2位置指示灯LED2Q0.3位置指示灯LED3Q0.4位置指示灯LED4Q0.5状态指示灯LED6Q0.6状态指示灯LED 7Q0.7状态指示灯LED 8四、实验程序五、程序说明此为机械手模拟实验。
其中,按下按钮LS1模拟机械手到达最右边碰到限位开关LS1,按下按钮LS2模拟机械手到达最左碰到限位开关LS2,按下按钮LS3模拟机械手到达最下碰到限位开关LS3,按下按钮LS4模拟机械手到达最上面碰到限位开关LS4,按下按钮LS6模拟物体M碰到机械手上的限位开关LS6;指示灯LED1亮表示机械手当前所处位置为右,LED2亮表示机械手当前所处位置为左,LED 3亮表示机械手当前所处位置为下,LED 4亮表示机械手当前所处位置为上,LED6点亮表示汽缸A开始工作,LED7点亮表示汽缸B开始工作,LED8点亮表示汽缸C开始工作,LED 9亮表示机械手处于夹紧状态。
目录一、绪论1二、课题介绍 2三、设计内容及要求 31、设计要求32、控制要求3四、控制原理介绍及图示41、机械手动作的模拟实验面板图42、输入/输出接线列表43、控制过程4五、设计思想及程序框图5六、控制方案6方案一:1、工作过程分析62、梯形图73、梯形图指令8方案二:1、工作过程分析92、梯形图103、梯形图指令11七、硬件设计121、元器件选择122、元器件清单123、硬件控制原理图13八、运行调试14九、小结15十、参考文献16附录17一、绪论可编程序控制器(programmable controller),现在一般简称为PLC (programmable logic controller),它是以微处理器为基础,综合了计算机技术、半导体集成技术、自动控制技术、数字技术、通信网络技发展起来的一种通用的工业自动控制装置。
以其显著的优点在冶金、化工、交通、电力等领域获得了广泛的应用,成为了现代工业控制三大支柱之一。
在可编程序控制器问世以前,工业控制领域中是继电器控制占主导地位。
传统的继电器控制具有结构简单、易于掌握、价格便宜等优点,在工业生产中应用甚广。
但是控制装置体积大、动作速度较慢、耗电较多、功能少,特别是由于它靠硬件连线构成系统,接线繁杂,当生产工艺或控制对象改变时,原有的接线刻控制盘就必须随之改变或更换,通用性和灵活性较差。
PLC的应用领域非常广,并在迅速扩大,对于而今的PLC几乎可以说凡是需要控制系统存在的地方就需要PLC,尤其近几年来PLC的性价比不断提高已被广泛应用在冶金、机械、石油、化工、轻功、电力等各行业。
PLC 能在恶劣的环境如电磁干扰、电源电压波动、机械振动、温度变化等中可靠地工作,PLC的平均无故障间隔时间高,日本三菱公司的F1系列PLC平均无故障时间间隔长达30万h,这是一般微机所不能比拟的。
机械手通常应用于动作复杂的场合来代替人的反复的操作,从而节省人的劳动,普通继电器由于其体积和接口等各方面限制,经常被应用于动作简单的电气及流水线控制,而PLC以其可靠性高、抗干扰能力强;控制系统构成简单。
PLC实训19 机械手动作控制PLC(可编程逻辑控制器)是一种常用于工业自动化系统中的控制装置。
通过编程和控制输入输出信号,PLC可以实现各种机械手动作的控制,包括抓取、移动、装配等。
在PLC实训19中,我们将学习如何使用PLC控制机械手的动作。
首先,我们需要连接PLC和机械手的输入输出信号。
PLC通常具有数字输入和数字输出端口,用于接收和发送电信号。
机械手通常具有感应器和执行器,用于检测和实施动作。
我们需要将这些设备与PLC连接起来,以确保PLC可以接收到正确的输入信号,并发送相应的输出信号给机械手。
接下来,我们需要编写PLC程序。
PLC程序是一系列的逻辑指令,用于控制PLC的输入输出信号。
在PLC实训19中,我们需要编写程序以控制机械手的动作。
例如,我们可以使用PLC程序来控制机械手的抓取动作。
当PLC接收到来自感应器的信号时,表示有物体需要被抓取,PLC程序会发送信号给执行器,从而触发机械手进行抓取动作。
此外,我们还可以编写PLC程序以控制机械手的移动动作。
例如,我们可以使用PLC程序来控制机械手的位置,使其移动到指定的位置。
当PLC接收到来自人机界面的输入时,表示需要机械手移动到某个位置,PLC程序会发送信号给执行器,从而触发机械手进行移动动作。
在PLC实训19中,我们还将学习如何编写PLC程序以控制机械手的装配动作。
例如,我们可以使用PLC程序来控制机械手将两个零件装配在一起。
当PLC接收到来自感应器的信号时,表示有两个零件需要被装配,PLC程序会发送信号给执行器,从而触发机械手进行装配动作。
在进行PLC实训19之前,我们需要学习PLC的基本知识,包括PLC的工作原理、编程语言、输入输出信号等。
通过学习这些知识,我们可以更好地理解和掌握PLC的实际应用。
总结起来,PLC实训19是一项关于使用PLC控制机械手动作的实训。
通过连接PLC与机械手的输入输出信号,并编写PLC程序,我们可以实现对机械手的抓取、移动和装配等动作的控制。
2.机械手动作的模拟实现在S24 S7-200模拟实验挂箱(四)完成本实验。
一、实验目的用数据移位指令来实现机械手动作的模拟。
二、控制要求图中为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:三、机械手动作的模拟实验面板图:此面板中的启动、停止用动断按钮来实现,限位开关用钮子开关来模拟,电磁阀和原位指示灯用发光二极管来模拟。
四、输入/输出接线列表面板SB1 SB2 SQ1 SQ2 SQ3 SQ4 PLC I0.0 I0.5 I0.1 I0.2 I0.3 I0.4面板YV1 YV2 YV3 YV4 YV5 HL PLC Q0.0 Q0.1 Q0.2 Q0.3 0Q0.4 Q0.5五、工作过程分析:当机械手处于原位时,上升限位开关I0.2、左限位开关I0.4均处于接通(“1”状态),移位寄存器数据输入端接通,使M10.0置“1”,Q0.5线圈接通,原位指示灯亮。
按下启动按钮,SB1置“1”,产生移位信号,M10.0的“1”态移至M101,下降阀输出继电器I0.0接通,执行下降动作,由于上升限位开关U0.2断开,M10.0置“0”,原位指示灯灭。
当下降到位时,下限位开关SQ1接通,产生移位信号,M10.0的“0”态移位到M10.1,下降阀Q0.0断开,机械手停止下降,M10.1的“1”态移到M10.2,M20.0线圈接通,M20.0动合触点闭合,夹紧电磁阀Q0.1接通,执行夹紧动作,同时启动定时器T37,延时1.7秒。
机械手夹紧工件后,T0动合触点接通,产生移位信号,使M10.3置“1”,“0”态移位至M102.,上升电磁阀YQ0.2接通,I0.1断开,执行上升动作。
山西机电职业技术学院毕业综合实践报告题目:机械手PLC控制系统的组态仿真模拟学生姓名段艳荣学院名称山西机电职业技术学院专业电气自动化技术学号28140105指导教师李潞生电子电气工程系二O一一年三月二十日公司简介立中车轮集团控股有限公司于2004年6月10日在新加坡注册成立,注册地址为哥烈码头10号海洋大厦19-08号。
公司在中国下设六个子公司,分别为保定市立中车轮制造有限公司、秦皇岛戴卡美铝车轮有限公司、天津立中车轮有限公司、天津戴卡轮毂制造有限公司、天津那诺机械制造有限公司及内蒙古立中霍煤车轮有限公司。
立中车轮集团控股有限公司于2006年10月在天津滨海新区设立天津车轮项目,项目总投资7.8亿元,注册资本2.6亿元,占地285,000多平方米(427亩)土地。
项目分三期建设。
计划于2011年前达成年产500万只铝合金汽车车轮的规模,项目建成后立中车轮控股有限公司的年产能将达到1060万只,将成为中国最大的汽车铝合金车轮制造厂商之一。
天津戴卡轮毂制造有限公司是立中车轮集团和中信戴卡强强联合的结晶(天津车轮项目一期工程)。
地处于面积达2,270平方公里,继珠江三角洲、长江三角洲经济发展区之后的环渤海经济发展区(天津滨海新区)。
公司成立于2007年10月23日,建筑面积41712m2,投资方共有4家,分别为:中信戴卡轮毂制造股份有限公司、立中车轮集团、天津立中车轮制造有限公司、澳门瑞智投资有限公司;企业注册资本为6000万元人民币,项目总投资为15000万元人民币,专业从事设计,制造,销售汽车铝合金车轮产品,现集团公司产品有1400余种从12in~26in的电镀和喷涂铝合金车轮,销售区域广阔。
公司现有员工750余人,设计产能为年产200万只,并已全面投入生产。
公司一直秉承“立中车轮、追求完美、服务用户、奉献社会”的经营方针,本着“诚信、勤勉、合作、发展”的公司理念,在强化内部管理,不断开发新品种的基础上,为用户提供优质的售前、售中、售后服务。
实验机械手动作的模拟实验一、实验目的了解并掌握步进指令在顺序控制中的应用及其编程方法。
二、实验原理步进指令又称步进顺控指令,它主要用于对较复杂的顺序控制程序进行编程。
步进指令有两条:STL指令和RET指令。
STL为步进开始指令,其意义为激活某个状态,在梯形图上体现为从主母线上引出的状态接点。
STL指令有建立子母线的功能,以使该状态的所有操作均在子母线上进行。
步进接点没有常闭触点,只有常开触点。
步进接点在使用时,需要使用SET指令将其置位。
RET为步进结束指令,其使步进顺控程序执行完毕时,非状态程序的操作在主母线上完成,防止出现逻辑错误。
状态转移程序的结尾必须使用RET指令。
三、机械手动作的模拟实验面板图图4-6 机械手动作的模拟实验面板图此面板中的启动、停止用动断按钮来实现,限位开关用钮子开关来模拟,电磁阀和原位指示灯用发光二极管来模拟。
四、控制要求图中为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:五、实验内容1.分配确定状态元件以及编程元件的地址,写出状态转移图。
2.根据状态转移图编写相应的梯形图或者指令表,并输入到PLC中,程序运行并调试。
六、思考题1.说明状态编程思想的特点和适用场合。
2.三菱FX系列PLC有多少状态器S?它们的使用是否有要求?七、实验报告要求:1.实验目的:本次实验主要达到的要求和目的。
2.实验设备:本次实验的主要设备。
3.实验程序:写出实验程序,对程序做必要的说明。
4.实验结果:写出运行结果,并分析是否与控制要求一致,做思考题。
P L C机械手动作的模拟集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-
目录
一、摘要 (1)
二、控制要求 (2)
三、控制原理介绍及图示 (3)
1、机械手动作的模拟实验面板图 (3)
2、输入/输出接线列表 (3)
3、控制过程 (3)
四、控制方案 (5)
1、工作过程分析 (5)
2、梯形图 (6)
五、运行调试 (9)
六、小结 (10)
七、参考文献 (11)
一、摘要
随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及。
机械手:mechanicalhand,也被称为自动手,autohand
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。
有些操作装置需要由人直接操纵,如用于原子能部门操持危
险物品的主从式操作手也常称为机械手。
机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
就个人而言,希望通过这次毕业设计对未来将从事的工作进行一次适应训练,从中锻炼自己分析问题、解决问题的能力,为今后的工作打下一个良好的基础。
由于能力所限,设计尚有许多不足之处,恳请老师给予指教。
2、控制要求
图中为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:
图1动作顺序图
三、控制原理介绍及图示
1、机械手动作的模拟实验面板图:
图2实验模板图
2、输入/输出接线列表
表1输入/输出接线列表
3、工作过程分析
当机械手处于原位时,上升限位开关I0.2、左限位开关I0.4均处于接通(“1”状态),移位寄存器数据输入端接通,使M10.0置“1”,
Q0.5线圈接通,原位指示灯亮。
按下启动按钮,SB1置“1”,产生移位信号,M10.0的“1”态移至M101,下降阀输出继电器I0.0接通,执行下降动作,由于上升限位开关U0.2断开,M10.0置“0”,原位指示灯灭。
当下降到位时,下限位开关SQ1接通,产生移位信号,M10.0的“0”态移位到M10.1,下降阀Q0.0断开,机械手停止下降,M10.1的“1”态移到M10.2,M20.0线圈接通,M20.0动合触点闭合,夹紧电磁阀Q0.1接通,执行夹紧动作,同时启动定时器T37,延时1.7秒。
机械手夹紧工件后,T0动合触点接通,产生移位信号,使M10.3置“1”,“0”态移位至M102.,上升电磁阀YQ0.2接通,I0.1断开,执行上升动作。
由于使用S指令,M20.0线圈具有自保持功能,Q0.1保持接通,机械手继续夹紧工件。
当上升到位时,上限位开关I0.2接通,产生移位信号,“0”态移位至M10.3,Q0.2线圈断开,不再上升,同时移位信号使M10.4置“1”,Q0.4断开,右移阀继电器Q0.3接通,执行右移动作。
待移至右限位开关动作位置,I0.3动合触点接通,产生移位信号,使M10.3的“0”态移位到M10.4,Q0.3线圈断开,停止右移,同时M10.4的“1”态已移到M10.5,Q0.0线圈再次接通,执行下降动作。
当下降到使I0.1动合触点接通位置,产生移位信号,“0”态移至
M10.5,“1”态移至M10.6,Q0.0线圈断开,停止下降,R指令使M20.0复位,Q0.1线圈断开,机械手松开工件;同时T38启动延时1.5秒,T1
动合触点接通,产生移位信号,使M10.6变为“0”态,M10.7为“1”态,Q0.2线圈再度接通,I0.1断开,机械手又上升,行至上限位置,
I0.2触点接通,M10.7变为“0”态,M11.2为“1”态,I0.2线圈断开,停止上升,Y004线圈接通,X003断开,左移。
到达左限位开关位置,X004触点接通,M11.2变为“0”态,M11.3为“1”态,移位寄存器全部复位,Q0.4线圈断开,机械手回到原位,由于I0.2、I0.4均接通,M10.0又被置“1”,完成一个工作周期。
再次按下启动按钮,将重复上述动作。
四、控制方案
1、工作过程分析:
1)使用状态转移指令当满足X000闭合条件时,跳转到S20,使线圈Y000得电,机械手开始下降;
2)当满足下限位开关X001闭合条件时,跳转到S21,触发定时器T0,延时1S后,使Y001得电并保持;机械手夹紧工件;
3)当满足定时器T0条件时,触发线圈Y002,机械手上升;
4)当满足上限位开关X002闭合条件时,跳转到S23,触发线圈Y003,使机械手带着工件右移;
5)当满足右限位开关X003闭合条件时,跳转到S24,触发线圈Y000,使机械手带着工件下降;
6)当满足下限位开关X001闭合条件时,跳转到S25,使线圈Y001失电,机械手松开工件;定时器T0触发;
7)当满足定时器T0条件时,跳转到S26,触发线圈Y002,使机械手上升;
8)当满足上限位开关X002闭合条件时,跳转到S27,触发线圈Y004,使机械手左移;
9)当满足左限位开关X004闭合条件时,机械手停止左移,复位。
表2机械手模拟控制系统的I/O分配表
输入信号输出信号
名称输入点编号名称输入点编号启动按钮SB1X000机械手下降指示灯YV1Y000
下限位按钮SQ1X001机械手夹紧/放松指示灯YV2Y001
上限位按钮SQ2X002机械手上升指示灯YV3Y002
右限位按钮SQ3X003机械手右移指示灯YV4Y003
左限位按钮SQ4X004机械手左移指示灯YV5Y004
2.梯形图
图3梯形图
五、运行调试
1.实验步骤?
1.?主机模块的COM接主机模块输入端的COM和输出端的COM1、COM2、COM3、COM4、COM5。
?
2.?主机模块的24+、COM分别接在实验单元的V+、COM。
?
3.?打开主机电源将程序下载到主机中。
?
4.?启动并运行程序观察实验现象。
六、小结
通过这次设计培养了我综合运用所学知识,发现,提出,分析和解决实际问题,锻炼实践能力的重要环节,是对我实际工作能力的具体训练和考
察过程。
懂得了理论与实际相结合的重要性,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,从
而提高自己的实际动手能力和独立思考的能力。
对于PLC有了总体大致上的了解,也认识到了在这个机械手的课题上还有很大的不足,还可以有更大的突破,机械手的设计在机械和电气方面上都还有很大的课题空间,在以后我仍需努力。
七、参考文献
【1】范次猛《可编程控制原理与应用》北京理工大学出版社
【2】李俊秀《可编程控制应用技术实训指导》化学工业出版社
【3】史国生《电气控制与可编程控制器技术》化学工业出版社
【4】余雷生方宗达《电气控制与PLC应用》北京机械工业出版社。