搬运分拣单元机械拆装与调试
- 格式:docx
- 大小:67.48 KB
- 文档页数:5
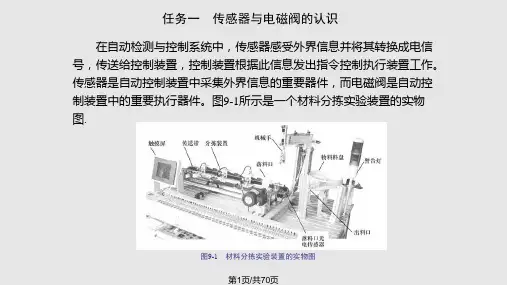

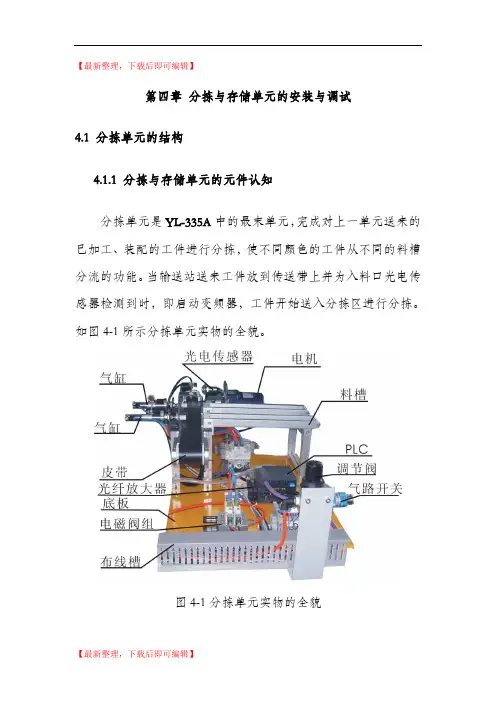
第四章分拣与存储单元的安装与调试4.1 分拣单元的结构4.1.1 分拣与存储单元的元件认知分拣单元是YL-335A中的最末单元,完成对上一单元送来的已加工、装配的工件进行分拣,使不同颜色的工件从不同的料槽分流的功能。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
如图4-1所示分拣单元实物的全貌。
图4-1分拣单元实物的全貌4.1.2 分拣单元的结构组成分拣单元的结构组成如图4-2所示。
其主要结构组成为:传送和分拣机构,传动机构,变频器模块,电磁阀组,接线端口,PLC模块,底板等。
图4-2分拣单元的主要结构组成1、传送和分拣机构传送和分拣机构如图4-3所示。
传送已经加工、装配好的工件,在光纤传感器检测到并进行分拣。
它主要由传送带、料抖、物料槽、推料(分拣)气缸、漫射式光电传感器、光纤传感器、磁感应接近式传感器组成。
图4-3传送和分拣机构传送带是把机械手输送过来加工好的工件进行传输,输送至分拣区。
料抖是用纠偏机械手输送过来的工件。
两条物料槽分别用于存放加工好的黑色工件和白色工件。
传送和分拣的工作原理:本站的功能是完成从装配站送来的装配好的工件进行分拣。
当输送站送来工件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给PLC,通过PLC的程序使启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果进入分拣区工件为白色,则检测白色物料的光纤传感器动作,作为1号槽推料气缸启动信号,将白色料推到1号槽里,如果进入分拣区工件为黑色,检测黑色的光纤传感器作为2号槽推料气缸启动信号,将黑色料推到2号槽里。
自动生产线的加工结束。
在每个料槽的对面都装有推料(分拣)气缸,把分拣出的工件推到对号的料槽中。
在两个推料(分拣)气缸的前极限位置分别装有磁感应接近开关,在PLC 的自动控制可根据该信号来判别分拣气缸当前所处位置。
当推料(分拣)气缸将物料推出时磁感应接近开关动作输出信号为“1”,反之,输出信号为“0”。
分拣单元的安装与调试安装工作步骤:1.传送带的安装2.铝合金框架结构安装3.分拣气缸的安装4.气路电磁阀安装5.入料口工件光电传感器安装6.光纤传感器安装7.金属传感器安装8.变频调速电机安装9.旋转编码器安装10.接线端口安装生产工艺流程作为独立设备被控制时,需要有工件。
工件可通过人工方式放置金属和黑白2钟颜色的方法来解决,只要工件放置在工件导向处即可。
具体过程如下:①初始状态:设备上电和气源接通后,若工作单元的3个气缸满足初始位置要求,则“正常工作”指示灯HL1常亮,表示设备准备好。
否则,改指示灯以1Hz频率闪烁。
②若设备准备好,按下启动按钮,系统启动,“设备运行”指示灯HL2常亮。
当传送带入料口人工放下已装配的工件时,变频器即可启动,驱动传动电动机以频率30Hz的速度,把工件带往分拣区。
③如果金属工件上的小圆柱工件为白色,则该工件对到达1号滑槽中间,传送带停止,工件被推到1号槽中;如果塑料工件上的小圆柱工件为白色,则该工件对到达2号滑槽中间,传送带停止,工件对被推到2号槽中;如果工件上的小圆柱工件为黑色,则该工件对到达3号滑槽中间,传送带停止,工件对被推到3号槽中。
工件被推出滑槽后,该工作单元的一个工作周期结束。
仅当工件被推出滑槽后,才能再次向传送带下料。
如果在运行期间按下停止按钮,该工作单元在本工作周期结束后停止运行。
调试运行开始启动(S0.0)物料口物料检测延时启动,高速计数器当前值清零,电机启动,延时0.5s0.5s延时(S0.1)白料传感器金属传感器(S0.2)(S0.1) (S0.2) 到达1区,电机停到达2区,电机停到达3区,电机停止,推杆1推料止,推杆2推料止,推杆3推料推料完成推料完成推料完成(S0.3)分拣完成,产生1s脉冲高速计数器清零1s延时。
分拣单元的设计、安装与调试
一、任务要求
⑴热悉分拣单元的结构和功能,热练拆装分拣单元。
(2>能够根据控制要求设计分拣单元的气动控制冋路,安装井调试…
(3)对PLC端口地址进行分配,根据控制功能设计控制程序,并现场调试
(4>能够熟练设置变频器参数…
二、任务分析
(1)分拣单元传送带由电动机驱动,电动机的速度通过变频器调节,掌握变频器的接线和参数设置。
(2)分拣单元的传送带在安装时,平衡性较难调整,应细心。
(3)分拣单元也是顺序控制系统,但控制功能比较简单。
【最新整理,下载后即可编辑】第四章分拣与存储单元的安装与调试4.1 分拣单元的结构4.1.1 分拣与存储单元的元件认知分拣单元是YL-335A中的最末单元,完成对上一单元送来的已加工、装配的工件进行分拣,使不同颜色的工件从不同的料槽分流的功能。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
如图4-1所示分拣单元实物的全貌。
图4-1分拣单元实物的全貌4.1.2 分拣单元的结构组成分拣单元的结构组成如图4-2所示。
其主要结构组成为:传送和分拣机构,传动机构,变频器模块,电磁阀组,接线端口,PLC模块,底板等。
图4-2分拣单元的主要结构组成1、传送和分拣机构传送和分拣机构如图4-3所示。
传送已经加工、装配好的工件,在光纤传感器检测到并进行分拣。
它主要由传送带、料抖、物料槽、推料(分拣)气缸、漫射式光电传感器、光纤传感器、磁感应接近式传感器组成。
图4-3传送和分拣机构传送带是把机械手输送过来加工好的工件进行传输,输送至分拣区。
料抖是用纠偏机械手输送过来的工件。
两条物料槽分别用于存放加工好的黑色工件和白色工件。
传送和分拣的工作原理:本站的功能是完成从装配站送来的装配好的工件进行分拣。
当输送站送来工件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给PLC,通过PLC 的程序使启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果进入分拣区工件为白色,则检测白色物料的光纤传感器动作,作为1号槽推料气缸启动信号,将白色料推到1号槽里,如果进入分拣区工件为黑色,检测黑色的光纤传感器作为2号槽推料气缸启动信号,将黑色料推到2号槽里。
自动生产线的加工结束。
在每个料槽的对面都装有推料(分拣)气缸,把分拣出的工件推到对号的料槽中。
在两个推料(分拣)气缸的前极限位置分别装有磁感应接近开关,在PLC的自动控制可根据该信号来判别分拣气缸当前所处位置。
当推料(分拣)气缸将物料推出时磁感应接近开关动作输出信号为“1”,反之,输出信号为“0”。
电气学院机电一体化《PLC》毕业设计报告设计课题:分拣单元的安装与调试专业班级:机电1124班学生姓名:指导教师:成绩:电气学院学院机电一体化《PLC》课程设计报告专业班级:机电1124班学生姓名:同组成员:设计地点(单位)_电气学院413教室_设计题目:_分拣单元的安装与调试_ _完成日期: 2 0 13 年12 月日指导教师评语:______________________ ______________________________________________________________________________________________________________________________________________________成绩评定(五级记分制):______ __________指导教师(签字):________ ___ _____课程设计任务书设计题目:自动化生产线分拣单元课题PLC设计指导教师:年月日分拣单元的安装与调试【摘要】:分拣单元是自动线的最末单元,完成对上一单元送来的已加工,装配完的工件的分拣工作,并使不同颜色的工件从不同的料槽分流。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
【关键词】:传送和分拣机构,传送机构,变频器模块,电磁阀组,PLC模块,接线端口,底板。
【ABSTRACT】:automatic sorting unit is the last line unit, complete unit sent on a machined, finished parts of the sorting assembly work, and make different colors from different parts of the trough diversion. When the transfer station and sent to the workpiece on the conveyor belt into the entrance and exit for the photoelectric sensor detects when the boot drive, start the workpiece into the sorting area for sorting.【KEY WORDS】:institutional transfer and sorting, transport mechanism, inverter module, solenoid valve, PLC module, wiring ports, bottom.一设计目的按照分拣单元的功能要求,先按计划进行机械安装与调试,设计手动单步控制程序和自动连续运行程序,并对其进行调试。
年月日分拣单元的安装与调试【摘要】:分拣单元是自动线的最末单元,完成对上一单元送来的已加工,装配完的工件的分拣工作,并使不同颜色的工件从不同的料槽分流。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
【关键词】:传送和分拣机构,传送机构,变频器模块,电磁阀组,PLC模块,接线端口,底板。
【ABSTRACT】:automatic sorting unit is the last line unit, complete unit sent on a machined, finished parts of the sorting assembly work, and make different colors from different parts of the trough diversion. When the transfer station and sent to the workpiece on the conveyor belt into the entrance and exit for the photoelectric sensor detects when the boot drive, start the workpiece into the sorting area for sorting.【KEY WORDS】:institutional transfer and sorting, transport mechanism, inverter module, solenoid valve, PLC module, wiring ports, bottom.一设计目的按照分拣单元的功能要求,先按计划进行机械安装与调试,设计手动单步控制程序和自动连续运行程序,并对其进行调试。
二设计要求1.熟悉分拣单元的功能及结构组成,并正确安装。
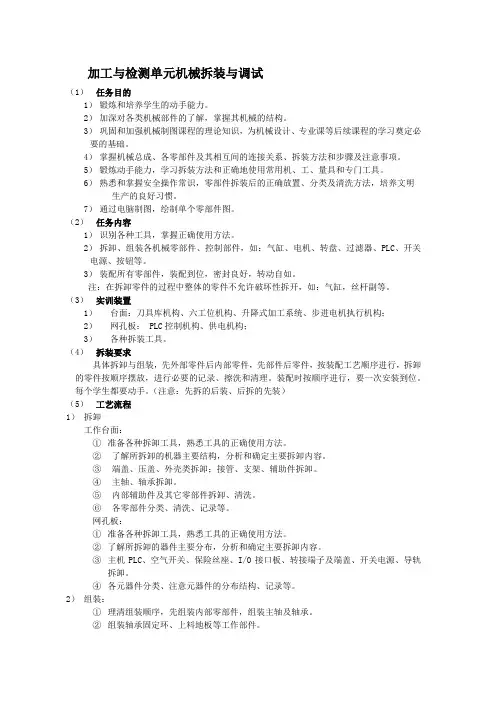
加工与检测单元机械拆装与调试(1)任务目的1)锻炼和培养学生的动手能力。
2)加深对各类机械部件的了解,掌握其机械的结构。
3)巩固和加强机械制图课程的理论知识,为机械设计、专业课等后续课程的学习奠定必要的基础。
4)掌握机械总成、各零部件及其相互间的连接关系、拆装方法和步骤及注意事项。
5)锻炼动手能力,学习拆装方法和正确地使用常用机、工、量具和专门工具。
6)熟悉和掌握安全操作常识,零部件拆装后的正确放置、分类及清洗方法,培养文明生产的良好习惯。
7)通过电脑制图,绘制单个零部件图。
(2)任务内容1)识别各种工具,掌握正确使用方法。
2)拆卸、组装各机械零部件、控制部件,如:气缸、电机、转盘、过滤器、PLC、开关电源、按钮等。
3)装配所有零部件,装配到位,密封良好,转动自如。
注:在拆卸零件的过程中整体的零件不允许破坏性拆开,如:气缸,丝杆副等。
(3)实训装置1)台面:刀具库机构、六工位机构、升降式加工系统、步进电机执行机构;2)网孔板: PLC控制机构、供电机构;3)各种拆装工具。
(4)拆装要求具体拆卸与组装,先外部零件后内部零件,先部件后零件,按装配工艺顺序进行,拆卸的零件按顺序摆放,进行必要的记录、擦洗和清理。
装配时按顺序进行,要一次安装到位。
每个学生都要动手。
(注意:先拆的后装、后拆的先装)(5)工艺流程1)拆卸工作台面:①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的机器主要结构,分析和确定主要拆卸内容。
③端盖、压盖、外壳类拆卸;接管、支架、辅助件拆卸。
④主轴、轴承拆卸。
⑤内部辅助件及其它零部件拆卸、清洗。
⑥各零部件分类、清洗、记录等。
网孔板:①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的器件主要分布,分析和确定主要拆卸内容。
③主机PLC、空气开关、保险丝座、I/O接口板、转接端子及端盖、开关电源、导轨拆卸。
④各元器件分类、注意元器件的分布结构、记录等。
2)组装:①理清组装顺序,先组装内部零部件,组装主轴及轴承。
搬运单元机械拆装与调试搬运单元机械拆装与调试(1)任务目的1)锻炼和培养学生的动手能力。
2)加深对各类机械部件的了解,掌握其机械的结构。
3)巩固和加强机械制图课程的理论知识,为机械设计、专业课等后续课程的学习奠定必要的基础。
4)掌握机械总成、各零部件及其相互间的连接关系、拆装方法和步骤及注意事项。
5)锻炼动手能力,学习拆装方法和正确地使用常用机、工、量具和专门工具。
6)熟悉和掌握安全操作常识,零部件拆装后的正确放置、分类及清洗方法,培养文明生产的良好习惯。
7)通过电脑制图,绘制单个零部件图。
(2)任务内容1)识别各种工具,掌握正确使用方法。
2)拆卸、组装各机械零部件、控制部件,如:气缸、机械手、过滤器、PLC、开关电源、按钮等。
3)装配所有零部件,装配到位,密封良好,转动自如。
注:在拆卸零件的过程中整体的零件不允许破坏性拆开,如:气缸,丝杆副等。
(3)实训装置1)台面:气动机械手;双导杆气缸(双联气缸);回转台;单杆气缸;2)网孔板:PLC控制机构、供电机构;3)各种拆装工具。
(4)机械原理具体拆卸与组装,先外部零件后内部零件,先部件后零件,按装配工艺顺序进行,拆卸的零件按顺序摆放,进行必要的记录、擦洗和清理。
装配时按顺序进行,要一次安装到位。
每个学生都要动手。
(注意:先拆的后装、后拆的先装)。
(5)实施步骤1)拆卸工作台面:①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的机器主要结构,分析和确定主要拆卸内容。
③端盖、压盖、外壳类拆卸;接管、支架、辅助件拆卸。
④主轴、轴承拆卸。
⑤内部辅助件及其它零部件拆卸、清洗。
⑥各零部件分类、清洗、记录等。
网孔板:①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的器件主要分布,分析和确定主要拆卸内容。
③主机PLC、空气开关、保险丝座、I/O接口板、转接端子及端盖、开关电源、导轨拆卸。
④各元器件分类、注意元器件的分布结构、记录等。
2)组装①理清组装顺序,先组装内部零部件,组装主轴及轴承。
搬运分拣单元的调试及故障排除
在机械拆装以及电气控制电路的拆装过程中, 及注意
能进一步了解掌握设备调试的方法、技巧点,培养严谨的作风,需做到以下几点:
(1)所用工具的摆放位置及使用方法;
(2)所用各部分器件的好坏及归零;
(3)注意各机械设备的配合动作及电机的平衡运行;
(4)电气控制电路的拆装过程中,必须认真检查线路的连接。
重点检查:电源线的走向。
(5)在程序在下载前,必须认真检查。
重点检查:各个执行机构之间是否会发生冲突, 如有冲突,应立即停下严,认真分析原因(机械、电气、程序等)并及时排除故
障,以免损坏设备。
(6)总结经验,把调试过程中遇到的问题,解决的方法记录下来。
分拣单元的拆装实训总结
分拣单元的拆装实训是针对工业机器人分拣单元进行的仿真实验,主要目的在于进行对分拣单元进行拆卸与装配的操作培训。
在本次实训中,我深刻体会到以下几个方面:
一、加强实践技能
本次实训过程中,我通过手动拆卸与装配操作,加深了对分拣单元的结构、构成以及功能的理解,同时通过实际操作,提高了我的实践技能和操作技巧,这对于提高我培养为一名工业机器人软硬件技术人才具有重要意义。
二、理论知识与实践技能的结合
通过实验过程中对分拣单元的拆卸和装配,我将之前学习的理论知识与实践技能相结合,使我的学习更有针对性,更加深入、细致和全面,同时提高了自己的动手能力和判断能力,感觉到收获颇丰。
三、意识到操作中的安全问题
在进行操作时,我深刻地意识到了操作中的安全问题,例如机器的伤害、电气设备的触电风险以及物品的损坏等,因此在操作过程中,我时刻注意到各类安全问题,并做好防护措施,保障了本次实验的安全进行。
综上所述,通过本次分拣单元的拆装实训,我不仅加强了自己的实践技能,理论知识与实践技能的结合,并且意识到了安全问题,为今后成为一名专业工业机器人软硬件技术人才打下了坚实的基础。
搬运分拣单元机械拆装与调试
(1)任务目的
1)锻炼和培养学生的动手能力。
2)加深对各类机械部件的了解,掌握其机械的结构。
3)巩固和加强机械制图课程的理论知识,为机械设计、专业课等后续课程的学习奠定必要的基础。
4)掌握机械总成、各零部件及其相互间的连接关系、拆装方法和步骤及注意事项。
5)锻炼动手能力,学习拆装方法和正确地使用常用机、工、量具和专门工具。
6)熟悉和掌握安全操作常识,零部件拆装后的正确放置、分类及清洗方法,培养文明生产的良好习惯。
7)通过电脑制图,绘制单个零部件图。
(2)任务内容
1)识别各种工具,掌握正确使用方法。
2)拆卸、组装各机械零部件、控制部件,如:气缸、电机、转盘、过滤器、PLC、开关电源、按钮等。
3)装配所有零部件,装配到位,密封良好,转动自如。
注:在拆卸零件的过程中整体的零件不允许破坏性拆开,如:气缸,丝杆副等。
(3)实训装置
1)台面:警示灯机构、提升机构、上料机构、执行机构;
2)网孔板: PLC控制机构、供电机构;
3)各种拆装工具。
(4)拆装要求
具体拆卸与组装,先外部零件后内部零件,先部件后零件,按装配工艺顺序进行,拆卸的零件按顺序摆放,进行必要的记录、擦洗和清理。
装配时按顺序进行,要一次安装到位。
每个学生都要动手。
(注意:先拆的后装、后拆的先装)
(5)工艺流程
1)拆卸
工作台面:
①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的机器主要结构,分析和确定主要拆卸内容。
③端盖、压盖、外壳类拆卸;接管、支架、辅助件拆卸。
④主轴、轴承拆卸。
⑤内部辅助件及其它零部件拆卸、清洗。
⑥各零部件分类、清洗、记录等。
网孔板:
①准备各种拆卸工具,熟悉工具的正确使用方法。
②了解所拆卸的器件主要分布,分析和确定主要拆卸内容。
③主机PLC、空气开关、保险丝座、I/O接口板、转接端子及端盖、开关电源、导
轨拆卸。
④各元器件分类、注意元器件的分布结构、记录等。
2)组装
①理清组装顺序,先组装内部零部件,组装主轴及轴承。
②组装轴承固定环、上料地板等工作部件。