单相异步电动机反转
- 格式:doc
- 大小:316.00 KB
- 文档页数:3
异步电动机实现正反转的方法
异步电动机实现正反转的方法是通过改变电机的输入电压或改变电机的相序来实现的。
以下是几种常见的实现方法:
1. 改变电机的输入电压:通过改变电机的输入电压的相位差和大小,可以实现电机的正反转。
当输入电压的相位差为0时,电机正转;当相位差为180度时,电机反转。
通过改变输入电压的大小,可以控制电机的转速。
2. 改变电机的相序:在三相异步电动机中,通过改变电机的相序可以实现电机的正反转。
在正转时,电机的相序为ABC,即A相、B相和C相的电流依次流过电机的三个绕组;在反转时,电机的相序为ACB,即A相、C相和B相的电流依次流过电机的三个绕组。
通过改变相序,可以改变电机的磁场方向,从而实现电机的正反转。
3. 利用变频器控制:变频器是一种能够根据输入信号改变输出频率的器件,通过改变电机的输入频率,可以实现电机的正反转。
当输入频率为标准频率时,电机正转;当输入频率为负向频率时,电机反转。
同时,通过改变输入频率的大小,可以控制电机的转速。
变频器在工业控制中广泛应用,可以实现电机的精确控制。
这些方法都可以实现异步电动机的正反转,具体选择哪种方法取决于应用场景和要求。

单相异步工作原理
单相异步电动机是一种常用的电动机类型。
它由定子和转子两部分组成。
定子上绕有若干绕组,通过电源供电产生磁场。
转子上绕有导体,制造转矩。
工作原理如下:当电机接通电源,定子绕组中流过交流电流,产生旋转磁场。
转子上的导体感受到磁场的作用力,产生转矩。
转子在磁场的作用下开始旋转。
由于转子上感应电流的存在,产生了反磁场。
这个反磁场与定子磁场相互作用,使得转子受到制动力。
由于导体自身的阻尼特性,转子会不断地进行短跑运动,即快速振动。
这个短跑运动帮助转子逐渐接近同步转速,最终与旋转磁场同步。
当转子同步转速之后,它将按照旋转磁场的方向和速度旋转。
此时,转子不再感应电流,反磁场减弱,不再对转子产生制动作用。
转子继续稳定地旋转,直至电机断电停止。
由于单相电源只能提供单向电流,无法产生旋转磁场。
因此,单相异步电机需要通过附加设备(如电容器)产生旋转磁场。
这使得单相异步电机在启动时表现较差,效率较低。

单相异步电动机的正反转原理1.单相电动机的基本结构2.单相电动机的工作原理当单相电压通过定子绕组时,会在定子上产生磁场。
如果转子上没有其他磁场的作用,则转子不会产生转动力矩。
因此,为了使转子能够转动,需要在转子上产生一个额外的磁场。
通常采用的方法是在单相电动机上安装一个起动辅助绕组,通过初始启动转矩将转子带起,然后通过运行电容器来延迟辅助绕组消失的时间。
3.单相电动机的正转原理在单相电动机的正转过程中,电动机的运行可以分为起动阶段和运行阶段两个部分。
(1)起动阶段:对于单相异步电动机,首先通过将电源接入电动机的起动绕组上,对电容器进行充电。
当电容器充电达到一定程度时,电容器与起动绕组相连接,形成一个辅助磁场。
该辅助磁场会产生一个理想的旋转磁场,将转子带起并开始转动。
(2)运行阶段:当电动机的转子开始转动后,起动绕组中的电流会逐渐减小并趋近于零。
而此时,主绕组中的电流会逐渐增大,并形成一个旋转磁场。
由于转子的运动速度与该旋转磁场的频率保持一致,因此转矩也会产生。
转矩的作用使得转子继续旋转,从而实现电动机的正转。
4.单相电动机的反转原理在单相电动机的反转过程中,需要改变电动机的供电方式,使其能够逆向旋转。
(1)停机:首先,需要停止电动机的运行。
可以通过切断电源或通过刹车装置等来实现。
(2)改变电源接线方式:在停机后,需要改变电源接线方式,使电源正、负极与电动机的起动绕组和主绕组相接反向。
这将导致电动机的磁场方向反向,从而使得电动机在反向旋转时产生转矩。
(3)启动:当电源接线方式改变后,可以重新启动电动机。
在启动过程中,起动绕组上的电容器仍然会被充电,形成一个辅助磁场,使转子带动并开始反向旋转。
同时,主绕组中的电流也会发生变化,产生一个反向的旋转磁场,进一步增强电动机的转矩,从而实现电动机的反转。
综上所述,单相异步电动机的正反转原理主要是通过在电动机上设置起动绕组和运行电容器,改变电源接线方式来实现。
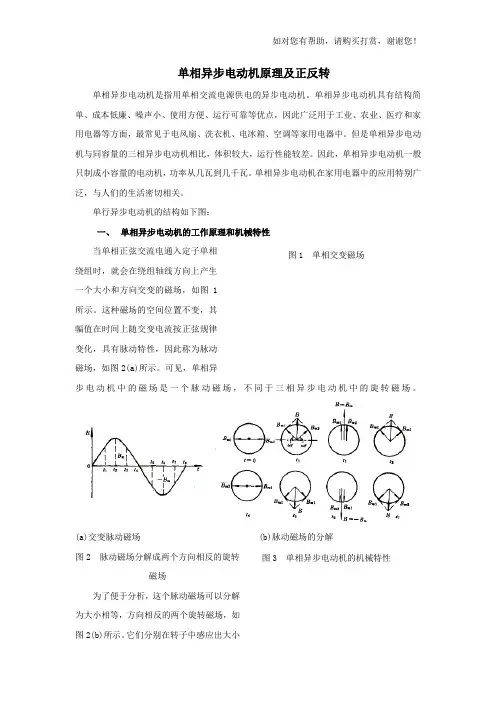
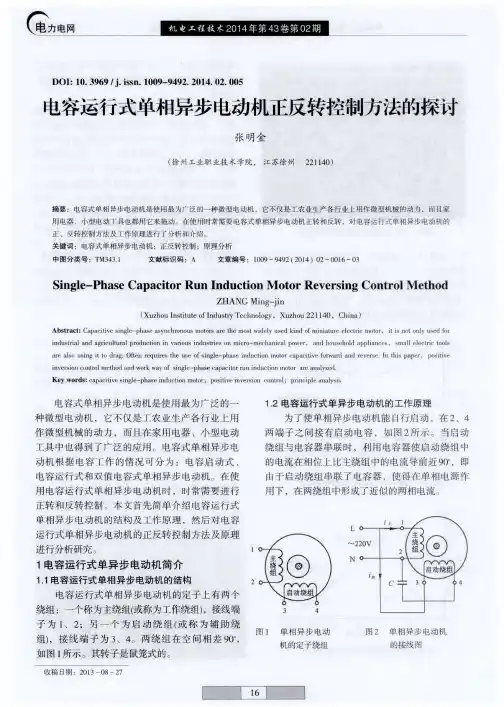
图3 单相异步电动机的机械特性单相异步电动机原理及正反转单相异步电动机是指用单相交流电源供电的异步电动机。
单相异步电动机具有结构简单、成本低廉、噪声小、使用方便、运行可靠等优点,因此广泛用于工业、农业、医疗和家用电器等方面,最常见于电风扇、洗衣机、电冰箱、空调等家用电器中。
但是单相异步电动机与同容量的三相异步电动机相比,体积较大,运行性能较差。
因此,单相异步电动机一般只制成小容量的电动机,功率从几瓦到几千瓦。
单相异步电动机在家用电器中的应用特别广泛,与人们的生活密切相关。
单行异步电动机的结构如下图:一、 单相异步电动机的工作原理和机械特性 当单相正弦交流电通入定子单相绕组时,就会在绕组轴线方向上产生一个大小和方向交变的磁场,如图1所示。
这种磁场的空间位置不变,其幅值在时间上随交变电流按正弦规律变化,具有脉动特性,因此称为脉动磁场,如图2(a)所示。
可见,单相异步电动机中的磁场是一个脉动磁场,不同于三相异步电动机中的旋转磁场。
(a)交变脉动磁场 (b)脉动磁场的分解 图2 脉动磁场分解成两个方向相反的旋转磁场为了便于分析,这个脉动磁场可以分解为大小相等,方向相反的两个旋转磁场,如图2(b)所示。
它们分别在转子中感应出大小图1 单相交变磁场相等,方向相反的电动势和电流。
两个旋转磁场作用于笼型转子的导体中将产生两个方向相反的电磁转矩T+和T- ,合成后得到单相异步电动机的机械特性,如图3所示。
图中,T+为正向转矩,由旋转磁场B m1产生;T- 为反向转矩,由反向旋转磁场B m2产生,而T为单相异步电动机的合成转矩。
从图3可知,单相异步电动机一相绕组通电的机械特性有如下特点:1.当n=0时,T + =T-,合成转矩T=0。
即单相异步电动机的启动转矩为零,不能自行启动。
2.当n>0时,T>0;n<0时,T<0。
即转向取决于初速度的方向。
当外力给转子一个正向的初速度后,就会继续正向旋转;而外力给转子一个反向的初速度时,电机就会反转。
单相异步电动机的反转与调速在日常生活中常需要对单相异步电动机进行反转和调速控制,如家用电器中洗衣机的正反转洗涤、调速及电风扇的调速等。
下面分别介绍这两种控制电路的组成原理。
一、单相异步电动机的反转要使单相异步机反转就必须改变旋转磁场的转向。
改变旋转磁场转向可通过把工作绕组(或启动绕组)的首端和末端与电源的接线对调、把电容器从一组绕组中改接到另一组绕组中等方法实现。
1.单相电容分相式异步电动机的反转控制单相电容分相式异步电动机需要变换旋转方向时,可以通过反接启动绕组或工作绕组的接线来实现。
把启动绕组或工作绕组中的一组首端和末端与电流的接线对调。
因为异步电动机的转向是从电流相位超前向电流相位落后的绕组旋转的,如果把其中的一个绕组反接,等于把这个绕组的电流相位改变了180。
,假若原来这个绕组是超前90,则改接后就变成了滞后90,结果旋转磁场的方向随之改变。
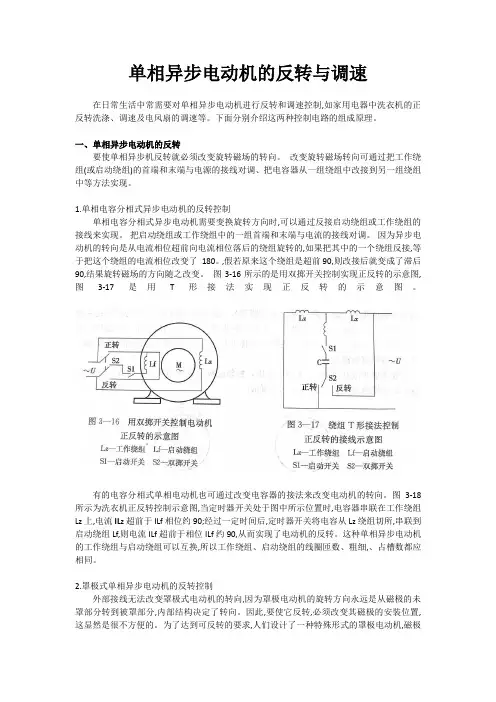
图3-16所示的是用双掷开关控制实现正反转的示意图,图3-17是用T形接法实现正反转的示意图。
有的电容分相式单相电动机也可通过改变电容器的接法来改变电动机的转向。
图3-18所示为洗衣机正反转控制示意图,当定时器开关处于图中所示位置时,电容器串联在工作绕组Lz上,电流IL z超前于ILf相位约90;经过一定时间后,定时器开关将电容从Lz绕组切所,串联到启动绕组Lf,则电流ILf超前于相位ILf约90,从而实现了电动机的反转。
这种单相异步电动机的工作绕组与启动绕组可以互换,所以工作绕组、启动绕组的线圈匝数、粗细,、占槽数都应相同。
2.罩极式单相异步电动机的反转控制外部接线无法改变罩极式电动机的转向,因为罩极电动机的旋转方向永远是从磁极的未罩部分转到被罩部分,内部结构决定了转向。
因此,要使它反转,必须改变其磁极的安装位置,这显然是很不方便的。
为了达到可反转的要求,人们设计了一种特殊形式的罩极电动机,磁极分成四个极靴,极靴上绕几匝粗绝缘导线作为罩极启动绕组,每个相对的绕组串联,用双掷开关使其交替短接,如图3-19所示。
电动机正反转控制实验心得一、实验目的本次实验的主要目的是了解电动机正反转控制原理,掌握电动机正反转控制的基本方法和技巧,以及通过实验验证电动机正反转控制的正确性。
二、实验原理1. 电动机正反转控制原理电动机正反转控制是指通过改变电动机绕组中的相序来改变其旋转方向。
在三相交流电路中,相序是指三相交流电压波形中各个相位之间的先后顺序。
当三相交流电压波形中各个相位之间的先后顺序发生改变时,由于三相绕组所受到的磁场方向也随之改变,因此可以改变电动机旋转方向。
2. 电动机正反转控制方法(1)交换两个绕组端子将两个绕组端子交换位置即可改变其旋转方向。
这种方法适用于单相异步电动机和直流电动机。
(2)更换接线板上的接线方式更换接线板上的接线方式可以改变三相异步电动机旋转方向。
具体方法为:将接线板上任意两条不同颜色的导线互换位置即可。
(3)使用单极性开关控制电源极性使用单极性开关控制电源极性可以改变直流电动机旋转方向。
具体方法为:在电源正负极之间接一个单极性开关,通过控制开关的状态来改变电源的正负极性。
三、实验步骤1. 准备工作(1)检查实验设备和器材是否正常工作。
(2)将电动机连接到电源上,确认其旋转方向。
(3)将实验仪器和器材按照实验要求连接好。
2. 实验操作(1)使用交换两个绕组端子的方法改变单相异步电动机旋转方向,并记录下观察结果。
(2)更换接线板上的接线方式,改变三相异步电动机旋转方向,并记录下观察结果。
(3)使用单极性开关控制直流电动机旋转方向,并记录下观察结果。
3. 实验注意事项(1)在操作实验设备和器材时要小心谨慎,不要造成任何损坏或意外事故。
(2)在更换接线板上的接线方式时,一定要注意正确连接各个导线,并检查无误后再进行实验操作。
四、实验结果分析通过本次实验,我成功地掌握了电动机正反转控制的基本方法和技巧,并通过实验验证了其正确性。
在实验过程中,我发现交换两个绕组端子的方法适用于单相异步电动机和直流电动机,更换接线板上的接线方式可以改变三相异步电动机旋转方向,使用单极性开关控制直流电动机旋转方向也是可行的。
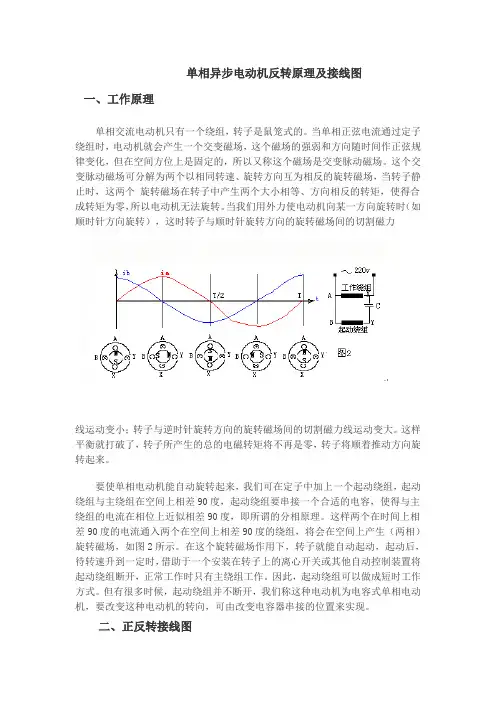
单相异步电动机反转原理及接线图一、工作原理单相交流电动机只有一个绕组,转子是鼠笼式的。
当单相正弦电流通过定子绕组时,电动机就会产生一个交变磁场,这个磁场的强弱和方向随时间作正弦规律变化,但在空间方位上是固定的,所以又称这个磁场是交变脉动磁场。
这个交变脉动磁场可分解为两个以相同转速、旋转方向互为相反的旋转磁场,当转子静止时,这两个旋转磁场在转子中产生两个大小相等、方向相反的转矩,使得合成转矩为零,所以电动机无法旋转。
当我们用外力使电动机向某一方向旋转时(如顺时针方向旋转),这时转子与顺时针旋转方向的旋转磁场间的切割磁力线运动变小;转子与逆时针旋转方向的旋转磁场间的切割磁力线运动变大。
这样平衡就打破了,转子所产生的总的电磁转矩将不再是零,转子将顺着推动方向旋转起来。
要使单相电动机能自动旋转起来,我们可在定子中加上一个起动绕组,起动绕组与主绕组在空间上相差90度,起动绕组要串接一个合适的电容,使得与主绕组的电流在相位上近似相差90度,即所谓的分相原理。
这样两个在时间上相差90度的电流通入两个在空间上相差90度的绕组,将会在空间上产生(两相)旋转磁场,如图2所示。
在这个旋转磁场作用下,转子就能自动起动,起动后,待转速升到一定时,借助于一个安装在转子上的离心开关或其他自动控制装置将起动绕组断开,正常工作时只有主绕组工作。
因此,起动绕组可以做成短时工作方式。
但有很多时候,起动绕组并不断开,我们称这种电动机为电容式单相电动机,要改变这种电动机的转向,可由改变电容器串接的位置来实现。
二、正反转接线图图一单相电动机要经过分相才能形成旋转磁场。
一般需要有两个绕组,一个是主绕组,另一个就是启动绕组。
两者相差90°电工角。
主绕组直接和L、N相连,启动绕组则串联电容后与电源相连。
这样,启动绕组由于电容有使电流超前于电压的功能,和主绕组的电流产生相位差并形成旋转磁场,使电机启动。
要使电机反转,只要把启动绕组与电源的接线的头尾对调一下就行了。
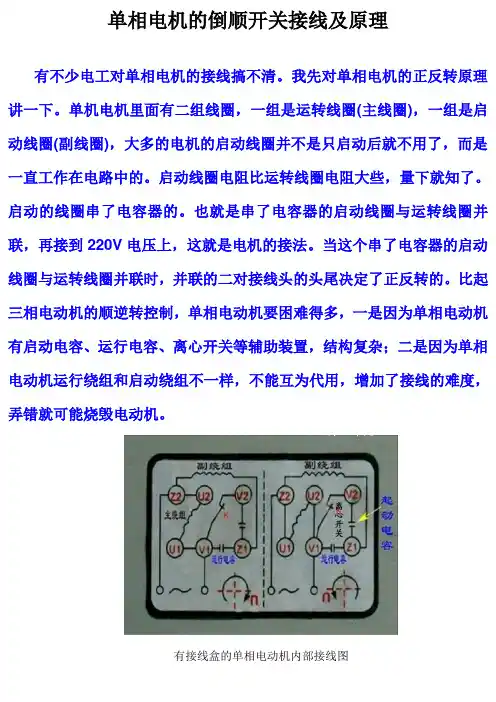
单相电机的倒顺开关接线及原理有不少电工对单相电机的接线搞不清。
我先对单相电机的正反转原理讲一下。
单机电机里面有二组线圈,一组是运转线圈(主线圈),一组是启动线圈(副线圈),大多的电机的启动线圈并不是只启动后就不用了,而是一直工作在电路中的。
启动线圈电阻比运转线圈电阻大些,量下就知了。
启动的线圈串了电容器的。
也就是串了电容器的启动线圈与运转线圈并联,再接到220V电压上,这就是电机的接法。
当这个串了电容器的启动线圈与运转线圈并联时,并联的二对接线头的头尾决定了正反转的。
比起三相电动机的顺逆转控制,单相电动机要困难得多,一是因为单相电动机有启动电容、运行电容、离心开关等辅助装置,结构复杂;二是因为单相电动机运行绕组和启动绕组不一样,不能互为代用,增加了接线的难度,弄错就可能烧毁电动机。
有接线盒的单相电动机内部接线图上图,是双电容单相电动机接线盒上的接线图,图上清晰的反映了电动机主绕组、副绕组和电容的接线位置,你只需要按图接进电源线,用连接片连接Z2和U2,UI和VI,电动机顺转,用连接片连接Z2和U1,U2和VI,电动机逆转。
单相电动机各个元件也好鉴别,电容都是装在外面,用肉眼就可以看清楚接线位置(如上图)启动电容接在V2—Z1位置,运行电容接在V1—Z1间,从里面引出的线也好鉴别,接在(如上图)UI—U2位置的是运行绕组,接在Z1—Z2位置的是启动绕组、接在V1—V2位置的是离心开关。
用万用表也容易区分6根线,阻值最大的是启动绕组,阻值比较小的运行绕组,阻值为零的是离心开关。
如果运行绕组和启动绕组阻值一样大,说明这两个绕组是完全相同的,可以互为代用。
单相电动机的绕组两端和电容两端不分极性,任意接都可以,但启动绕组和运行绕组不能接反,启动电容和运行电容不能接反,否则容易烧启动绕组以下是自己为了消化吸收而画的接线图,在此献给广大电工朋友,希望能给大家带来一些帮助。
本人学识粗浅,特建立QQ群:79694587 以便大家相互学习。
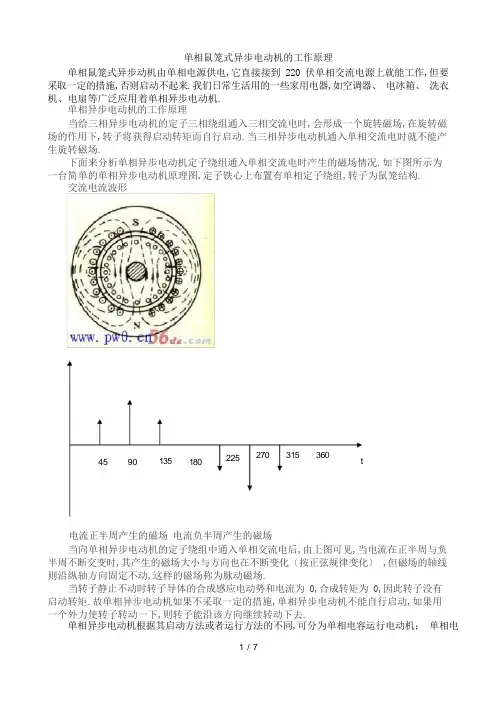
单相鼠笼式异步电动机的工作原理单相鼠笼式异步动机由单相电源供电,它直接接到 220 伏单相交流电源上就能工作,但要采取一定的措施,否则启动不起来.我们日常生活用的一些家用电器,如空调器、 电冰箱、 洗衣 机、电扇等广泛应用着单相异步电动机.单相异步电动机的工作原理当给三相异步电动机的定子三相绕组通入三相交流电时,会形成一个旋转磁场,在旋转磁场的作用下,转子将获得启动转矩而自行启动.当三相异步电动机通入单相交流电时就不能产 生旋转磁场.下面来分析单相异步电动机定子绕组通入单相交流电时产生的磁场情况.如下图所示为一台简单的单相异步电动机原理图,定子铁心上布置有单相定子绕组,转子为鼠笼结构.交流电流波形电流正半周产生的磁场 电流负半周产生的磁场当向单相异步电动机的定子绕组中通入单相交流电后,由上图可见,当电流在正半周与负半周不断交变时,其产生的磁场大小与方向也在不断变化〔按正弦规律变化〕 ,但磁场的轴线 则沿纵轴方向固定不动,这样的磁场称为脉动磁场.当转子静止不动时转子导体的合成感应电动势和电流为 0,合成转矩为 0,因此转子没有启动转矩.故单相异步电动机如果不采取一定的措施,单相异步电动机不能自行启动,如果用 一个外力使转子转动一下,则转子能沿该方向继续转动下去.单相异步电动机根据其启动方法或者运行方法的不同,可分为单相电容运行电动机; 单相电45 90 225 315 360 270 135 180 t容启动电动机;单相罩极式电动机等.下面分别介绍.单相异步电动机容量普通较小,运行性能较差.图 1 单相电容运行异步电动机原理图<a>接线图<b>电流相量图图 1 是单相电容运行异步电动机工作原理图.单相电容式异步电动机的定子铁芯上嵌放两套绕组:主绕组 U1—U2 〔主绕组又称工作绕组〕和副绕组 Z1—Z2 〔副绕组又称启动绕组〕 . 两套绕组在空间的位置上互差 90 度电角度.在启动绕 Z1—Z2 中串入一个电容器 C 后再与工作绕组并联,然后接到单相电源上.设流过启动绕组 Z1-Z2 的电流为 iz,流过工作绕组 U1—U2 的电流以为 iu,当接上电源后,由于电容的充放电作用,iz 落后于 iu90 度,流过两套绕组的电流 iz 与 iu 在相位上相差 90 度,如图 2 所示.设电动机两个绕组接上交流电源后,电流为正值时,电流从绕组的头端进去尾端出来;电流为负值时,电流从绕组的尾端进去头端出来.从图 2 可看到:在 t=0 瞬间,iz=0,绕组 Z1—Z2 中无电流流过;而这瞬时 iu 为负的最大值,绕组 U1—U2 中电流由 U2 进 Ul 出.用右手定则可判断,此时电动机中会产生如图 2 所示磁场,其合成磁场方向向下.从图 2 可看到:在ωt=π/2 瞬间,iu=0,绕组 U1—U2 中无电流流过;这瞬间 iz 为正的最大值,绕组 Z1-Z2 中电流从 Z1 进Z2 出.此时电动机内磁场分布如图 2 所示,其合成磁场方向较 t=0 时刻顺时针方向旋转了 90 角度.在ωt=3 π/2 瞬间,iz=0,绕组 Z1—Z2 中无电流流过;这瞬间 iu 为正的最大值,绕组 U1 —U2 中电流从 U1 进 U2 出.此时电动机内磁场分布如图 2 所示,其合成磁场方向较t=π/2 时刻顺时针方向旋转了 90 角度.依此类推,可看到单相鼠笼式异步电动机中 iz 与 iu 两个电流在单相异步电动机中产生的合成磁场也是旋转磁场,如图 2 所示.单相鼠笼式异步电动机转子也是鼠笼式转子,即转子绕组是两端由短路环连接的鼠笼条. 鼠笼条反方向切割旋转磁场 ,产生感应电动势和感应电流 .在旋转磁场作用下,受电磁力使转子转动.只要改变工作绕组或者启动绕组的首端、尾端与电源的接线,就可改变旋转磁场旋转方向,控制电动机的正反转.单相机电正反原理只要把工作绕组或者启动绕组的两个接线对调一下就行,产生相反方向的磁场,机电就反转了.左边是单向运转的电路图.右边是正反转的电路图,如双桶洗衣机的洗涤机电.正反转的机电,普通将运行绕组与启动绕组做成一样,可以互换.单相机电有两个绕组:主绕组又称工作绕组或者运行绕组,副绕组又称启动绕组,有的小负载单相机电这两个绕组彻底一样,互相可以交换,但多数单相机电〔带较大负载的农用机电〕为了增大启动力矩,副绕组线圈细、匝数多、阻值大;副绕组与主绕组之间有一启动电容;只要交换两个绕组中的一个绕组的首尾接线就可反转,交换电源 L/N 是无效的.当两绕组彻底一样,机电可能是三端子接线,1,3 为两绕组的公共接线端,接交流电源的 L, 2/4 端子之间联有启动电容, 如果交流电源的 N 端接端子 2 为正转,则 N 改接端子 4 为反转;如果是四端子,见图四接线;图 3:三端子单相机电[两绕组相同]图四:四端子单相机电[两绕组相同]农用单相机电的主/副绕组不一样,不能采用上面交换主/副绕组的做法,否则,会烧坏机电, 普通应有四个端子:1/2 为主绕组,3/4 为副绕组,正转见图五:图五如果要反向转动,正确的做法是交换一个绕组的首尾接线,主副绕组的区分很简单,根据阻值就可判断出.<本文转自电子工程世界: eeworld ./mndz/2022/0317/article_15165.html>一、单相异步电动机的结构单相异步电动机中,专用机电占有很大比例,它们的结构各有特点,形式繁多.但就其共性而言,电动机的结构都由固定部份---定子、转动部份----转子、支撑部份---端盖和轴承等三大部份组成.1、机座2、铁心3、绕组4、端盖5、轴承6、电容7、铭牌1、机座机座结构随电动机冷却方式、防护型式、安装方式和用途而异.按其材料分类,有铸铁、铸铝和钢板结构等几种.铸铁机座,带有散热筋.机座与端盖联接,用螺栓紧固.铸铝机座普通不带有散热筋.钢板结构机座,是由厚为 1.5-2.5 毫米的薄钢板卷制、焊接而成,再焊上钢板冲压件的底脚.有的专用电动机的机座相当特殊,如电冰箱的电动机,它通常与压缩机一起装在一个密封的罐子里.而洗衣机的电动机,包括甩干机的电动机,均无机座,端盖直接固定在定子铁心上.2、铁心铁心包括定子铁心和转子铁心,作用与三相异步电动机一样,是用来构成电动机的磁路.3、绕组单相异步电动机定子绕组常做成两相:主绕组〔工作绕组〕和副绕组〔启动绕组〕 .两种绕组的中轴线错开一定的电角度. 目的是为了改善启动性能和运行性能.定子绕组多采用高强度聚脂漆包线绕制.转子绕组普通采用笼型绕组.常用铝压铸而成.4、端盖相应于不同的机座材料、端盖也有铸铁件、铸铝件和钢板冲压件.5、轴承轴承有滚珠轴承和含油轴承.电风扇电动机结构单相电容运转异步机电工作原理与故障分析 [复制]发表于 2022-1-22 14:56:14一、单相异步机电的定义与标识说明1、单相异步机电是指由单相电源供电的电动机,但它并不表示机电的定子上惟独一相绕组, 它是由空间上相差90°相位角的两套绕组构成,二者共同产生旋转磁场,在转子上产生转矩而旋转的电动机.2、YD〔S〕Kaa-bc 所代表的意义Y—异步; D〔S〕—单〔双〕轴; K—空调用; aa 代表功率名义值; b 代表极数; c 为设计序号或者其它意义以 YDK24-6 T 为例说明如下设计序列号为 T、功率名义值为 24W 、极数为 6 极的单轴伸空调用异步电动机.1、固定部份—定子;由定子铁芯、定子绕组和机座〔壳〕组成.定子铁芯是机电磁路的一部份,普通由 0.5mm 硅钢片叠压而成,片与片之间相互绝缘,以减少涡流损耗.定子绕组普通由高强度聚酯漆包线绕制而成.机座〔或者机壳〕普通由A3 钢板冲制而成,大机电〔单相〕则是钢板卷筒后在与铸铝端盖配合而成,三相机电普通均为铸铁机座.2、转动部份—转子:由转子铁芯、转子绕组〔纯铝〕、转轴〔45#碳结钢〕组成.单相电容运转异步机电与三相机电的区别:三相机电的绕组在空间按120°电角度分布,单相异步机电则按则按90°电角度分布,见下图.在单相机电中,由于单相绕组产生的是脉振磁场,机电没有起动转矩,不能起动,如右图表示:i=Icosωt要使单相机电具有起动转矩并旋转,就必须使其分相,普通的,单相机电分相有以下几种型式:1、电阻分相2、电容分相3、罩极分相空调风机用单相异步机电几乎均采用第二种方式,即要使单相机电既能运转又能独立启动, 就必须在机电定子铁芯中嵌放轴线在空间相隔90°电角度的两相绕组,其中一相绕组称为主绕组〔用 M 表示〕 .另一相称为副绕组或者起动绕组〔用 A 表示〕 .副绕组串接一移相元件电容器,形成事实上的两相电源.原理如下图示:在单相机电中,若定子上的主、副两相绕组彻底对称,两相绕组接到两相对称电源上,则与 4 页三相机电图示一样,也产生在空间旋转的圆形旋转磁场.可见对称两相绕组通入对称两相电流产生的旋转磁势与三相机电产生旋转磁势一样.其旋转速度与电源频率和机电极数有关:即 n=2×60f/p,其中"f"—电源频率〔Hz〕"p"—机电极对数"n"—磁场旋转转速,即机电同步转速〔r/min〕当机电中磁场以n速度旋转时,处于旋转磁场中的转子导条就会切割磁力线而产生感应电势和感应电流,感应电流在磁场的作用下产生电磁力和电磁力矩,行成一定的转速n’.普通情况下机电转速n’不等于旋转磁场转速n.因为n’= n 时,转子导条相对旋转磁场是静止的, 导条中就不会产生感应电势和感应电流,机电就不会产生电磁力矩,机电转速就会自然下降. 因转子速度始终低于旋转磁场速度,故称此种机电为"单相异步电动机".前面讲到,单相绕组产生的是一个脉振磁场,因此单相机电的启动转矩为零,即机电不能自行启动,要使单相机电能够自行启动,就必须如同三相异步机电一样,在机电内部产生一个旋转磁场.产生旋转磁场最简单的方法是在两相绕组中通入相位不同的两相电流.因此在单相异步机电中必须有两套绕组,一套为工作绕组,另一套为副绕组或者启动绕组,工作绕组或者主绕组 M 与副绕组A 的轴线在空间相隔90°电角度,副绕组串联一个适当的电容 C〔电容选配不当会使机电系统变差,如片面增大或者减小电容量,负序磁场可能加强,使输出功率减小性能变坏, 磁场可能会由圆形或者近似圆形变为椭圆形〕再与工作绕组并接于电源.由于副绕组串联了电容, 所以副绕组中的电流在相位上超前于主绕组电流,这样由单相电流分解成具有时间相位差的两相电流 M 和 A<也就是事实上的两相电流>,于是机电的两相绕组就能产生圆形或者椭圆形的旋转磁场.由于大多数情况下两相绕组总是不对称的,谐波分量较多,因此单相异步机电的性能总要比三相异步机电差得多.谐波对机电的影响主要有以下三个方面:1、使机电的附加损耗增加;2、引起机电振动并产生噪音;3、产生附加转矩,使机电的启动发生艰难〔某些位置较大、某些位置又较小、某些位置干脆就不能启动,削弱办法之一,就是采用斜槽转子.这就是我们看到的转子槽是斜的原因之一〕作为单相异步电动机其调速方法有三种:〔1〕变极调速;〔2〕降压调速;〔3〕抽头调速.在单相机电中,有倍极调速和非倍极调速之分.倍极调速机电普通定子上惟独一套绕组,用改变绕组端部联接方法获得不同的极对数以达到调整旋转磁场的转速.在极数比较大的变极调速中,定子槽中安放两套不同极数的独立绕组,实际上相当于两台不同极数的单速机电的组合,其原理和性能与普通单相异步机电一样降压调速方法不少,如串联电抗器〔吊扇〕、串联电容、自耦变压器和串联可控硅调压调速. 空调中最常用的调压调速是可控硅〔塑封〕调压调速.可控硅调速是改变可控硅导通角的方法,改变电动机端电压的波形,从而改变了电动机的端电压的有效值.可控硅导通角α1=180°时,机电端电压为额定值,α1<180°时电压波形如下图实线部份,机电端电压有效值小于额定值,α1 越小,电压越低,如下图:塑封 PG 机电就是可控硅降压调速.对于塑封 PG 机电,其绕组工作原理与抽头机电一致,但不同之处在于塑封 PG 机电的输入电压不是直接接到电源上的,而是通过可控硅的输出端施加电压于机电上的,其可控硅的输出电压是可调节的.其电气原理图见图 3,调速是利用机电输出转矩与机电输入电压成近似一次关系,通过改变机电输入电压来改变机电的输出转矩,起到调节机电转速的作用,其原理如下图示:该结构是在机电的轴上装有一个磁环,它普通有 6 极磁环与 2 极磁环 2 种.当机电转子旋转一圈时,磁环也旋转一圈,磁环与 PG 板中的霍尔元件相感应,6 极磁环会在 PG 板的 OUTPUT〔白〕脚中输出 3 个脉冲,2 极磁环会输出 1 个脉冲,这样根据输出脉冲的数量就可以知道机电的转速.在可控硅中设定有预定的转速值,将它与从 PG 块中采样取得的转速值相比较,当转速偏低时,则提高可控硅的输出电压〔可控硅导通角变大〕 ,当转速偏高时,则降低可控硅的输出电压〔可控硅导通角变小〕 ,这样通过 PG 信号的反馈调节可控硅输出电压就实现了对机电的平滑调速.由于可控硅的输出电压不会高于其输入电压,因此在机电设计时要保证机电达到高风档的转速时其可控硅的电压不高于工作的额定电压.如我国额定电压为 220VAC,则设计时的可控硅电压普通设计为 180VAC~200VAC 摆布.此参数值设定太低则造成机电材料浪费,且可控硅若损坏击穿后机电直通市网电压,其机电温升会较高;若此参数值设定过高则会造成市网电压降低时,有可能达不到设定的额定转速,影响空调的能力电容运转电动机在调速范围不大时,普遍采用定子绕组抽头调速.此时定子槽中放置有主绕组、副绕组与调速绕组,通过改变调速绕组与主、副绕组的联接方式,调整气隙磁场大小与椭圆度来实现调速的目的.普通电容运转单相机电,主绕组与副绕组嵌在不同的槽中,绕组与铁芯间由聚酯纤维无纺布〔DMDM 或者 DMD〕隔开,其在空间普通相差 90 度电角度,且副绕组通过串联一个工作电容器后与主绕组并接于电源.当机电通电后,主绕组与副绕组在气隙中共同形成一个有方向有幅值强度的旋转磁场.其方向与主、副绕组所处的空间位置等有关,它决定了机电的转向;其幅值强度则与主副绕组的参数设计有关,它决定了机电输出力矩的大小.该旋转磁场与转子鼠笼转子相互作用,使电动机按一定的方向旋转.若调换主副绕组的空间位置,则旋转磁场的旋转方向会相反,该反方向的旋转磁场与转子相互作用,使电动机的转向也会相反.抽头调速可分为 T 型抽头调速和 L 型抽头调速.L 型抽头调速又可分为主绕组抽头L-1 型和副绕组抽头 L-2 型. 目前最常用的是 T 型抽头调速和副绕组抽头L-2 型调速.原理路线图见下T 型抽头调速优点:中、低档运行绕组温升低;缺点:机电高档效率低,主绕组易形成匝间短路〔见企业技术标准 13 设计案例的 DC03.043-001"YDK29-8E 机电匝间短路案例分析"〕. L 型抽头调速优点:机电高档效力高,绕组不易形成匝间短路;缺点:中、低档运行绕组温升高.不论哪种调速,都各有优缺点,选用哪种除要考虑设计时要达到哪个结果,还要考虑机电的经济性,普通 L 型较经济〕 .A> 空载输入电流:是指机电在额定工作电压、额定电源频率、额定电容下、空载运行〔轴上输出功率为零〕情况下,流入电动机的电流称为空载电流.单位: A 或者mA.B>空载输入功率:是指机电在额定工作电压、额定电源频率、额定电容下、空载运行〔轴上输出功率为零〕情况下,输入电动机的功率.这部份功率消耗主要表现在磁场储能,定、转子绕组铜耗和铝耗,交变磁通在铁芯损耗,通风、轴承磨擦产生机械损耗.单位: W 〔瓦〕C>负载输入电流:是指电动机在额定工作电压、额定电源频率、额定电容、带额定负载运行在额定转速下,所输入机电的电流.单位: A 或者mA.D>额定负载输出功率:是指电动机在额定电压、额定电源频率、额定电容、带额定负载运行在额定转速下,轴伸所输出的有功功率.单位: W 〔瓦〕E>温升:指电动机在额定测试条件下运行,内部绕组与铁芯部份的温度相对于测试环境温度的升高值. 目前较常用的测试温升方法为绕组电阻法.F>噪音:机电噪音可分为机械噪音和电磁噪音.机械噪音通常由机电装配不良定、转子磨擦与轴承声等形成.电磁噪音通常由定、转子气隙不均匀或者磁场过于饱和造成,定、转子气隙不均匀受装配零部件同轴度的影响较大,磁场过于饱受所设计功率较大机电的材料限创造成.噪音用分贝 dB 表示.A〕整机噪音与振动:机电噪音值在某一频段存在峰值,此噪音峰值频段与整机固有频率相接近或者重合,形成共鸣、共振和整机噪音.整机预防与解决措施:在机电确认阶段将机电噪音峰值频段与整机固有频率错开〔这就是普通情况下一次送样不能成功的原因之一,也是我们一般遵循的,只要是系统中的对机电有影响的零部件如支架和风轮风叶等的改变,就必须装整机做噪音等测试〕机电,空调钣金件上加阻尼胶,调整风叶形状、增加机电支架刚性〔如04 年今年 3 月份汕头浮现较多 71S振动和噪音严重的问题,后将机电支架加强后上述现象全部消失〕、机电安装脚上加胶垫,调整空调板金件的形状、厚度,调整机电极数、定转子的槽配合、定转子直径、定转子气隙、转子斜槽度、铁芯长度、轴承距离等.B>转速不一致:风叶的变化〔不同厂家不同模号〕、蒸发器片距变化、风道的变化、测试环境的变化〔温度、湿度〕、机电工艺波动的原因〔铝环、定子端部高度控制、绕线模具变化、气隙变化、硅钢片材料变化等〕 .C>电磁声:定子椭圆、同轴度大、轴承距过大、端盖强度不够、磁路设计不对称.D>轴承声:装配过程轴承损坏、轴承油脂声、轴承与轴承室配合松动.E>磨擦声:定转子相擦、错片、异物、漆瘤与风轮风叶变形和转轴弯曲等.F>转速低:转子导条和端环截面过小、定转子气隙偏大;G>温升高:铁芯长度偏低、漆包线截面偏小〔即铁、铜耗过大〕、散热不良;H>机电冒烟:〔1〕绕组匝间短路;〔2〕焊接线不良导致接触电阻过大,机电发热;<3>电容器击穿,导致电路的容性成份消失,机电单相运行〔事实上机电无法运行,处于堵转状态〕;I〕机电漏电:机电内部或者引出线绝缘不良;J〕机电转速下降机电部份绕组匝间短路;电容器容量衰减;转子断条:K〕机电失速〔保护〕或者不转霍尔元件失效;可控硅击穿.即使霍尔元件正常,信号有反馈,但因可控硅已经击穿,电压已不可调;转子被异物卡滞或者机电无电和烧毁;在机电设计已是最优化状态下,下述要求可增加成本:1、负载不变情况下,要求提高转速〔即提高功率〕;M∝P/V M:力矩 P:功率 V:转速2、负载不变情况下,要求降低温升;1.气隙〔mm,普通选 0.25 到 0.35mm〕变小.气隙越小,谐波漏抗越大,导致最大转矩和启动转矩降低;同时杂耗增大、效率降低、温升增高;2.增多槽数.槽数多了,机电的漏抗减小,导致最大转矩和启动转矩有所增加,效率和功率因数有所增加,因为绕组分散,绕组接触铁芯的散热面积增加,温升会降低;3.定转子槽配合.如果槽配合选择不当,可引起较大的附加转矩〔使启动性能变坏,甚至启动不起来〕、附加损耗增大,导致温升增高;4.增加铁芯长度以降低磁密〔磁密很饱和时〕、增大漆包线直径以降低电密、使用铁损小的硅钢等从而降低温升.。
维修基本知识(二)单相异步电动机的故障现象及排除方法单相异步电动机按其启动方法不同可分多种,但在实际中应用最广泛的是电容分相单相异步电动机。
因此本部分内容主要以该类电动机为例予以分析,电阻分相及罩极电动机的故障分析与处理与本内容大体相访。
电容分相单相异步电动机的常见故障主要有:一、电源正常,但通电后电动机不转动出现这类故障可以从两方面找原因:一是电动机电气方面的故障;二是电动机机械方面的故障。
1、启动绕组本身断路对此可用万用表欧姆挡测量启动绕组的直流电阻,一般均应小于几十欧姆或上百欧姆。
如电阻值太大,说明启动绕组本身断路。
如断路点在槽外较明显处,则可用焊接法予以恢复,否则需拆除部分或全部绕组予以更换。
2、离心开关在启动时触点未闭合(1)离心开关的结构离心开关的具体结构多种多样,但其基本工作原理均大体相仿,现以如图表2-1所示常见的一种为例予以说明。
该离心开关由旋转部分和静止部分所组成,图2-1a为旋转部分,它安装于电动机转轴上,与电动机一起旋转,旋转部分主要由三个受拉力弹簧2控制的指形铜触片1组成。
该铜触片与电动机转轴是相互绝缘的,但三个铜触片本身在电路上则是相互连通的。
图2-1b所示为静止部分,它固定安装在端盖或机座上,静止部分主要由两个相互绝缘的半圆形铜环3组成,这两个半圆形铜环与机座(端盖)也互相绝缘,其中一个半圆环接电源;另一个半圆环接启动绕组(其作用相当于交流接触器中接交流电源及接电动机的两个静触点)。
当电动机静止时指形铜触片在弹簧片2拉力作用下,分别压在两个半圆形铜环的侧面,由于三个指形铜触片本身是连通的(相当于交流接触器中的动触桥),这样就使启动绕组与电源接通,电动机开始启动。
当电动机转速达到某一数值时,安装于旋转部分的指形铜触片由于离心力的作用而向外张开,使铜触片与半圆形铜环分离,即将启动绕组从电源上切除,电动机启动结束,进入正常运行。
图2-1离心开关的结构a)为旋转部分 b)所示为静止部分( 2 )离心开关常见故障离心开关的常见故障主要有离心开关不闭合(即指形铜触片无法压在半圆形铜环上)和离心开关打不开(即指形铜触片无法与半圆形铜环脱离)。
异步电动机正反转工作原理首先,我们先了解一下异步电动机的基本结构。
异步电动机由定子和转子两部分组成。
定子是不动的部分,通常由一组绕在铁心上的绕组组成。
而转子则是可以旋转的部分,通常由绕在铁心上的导体环构成。
在工作时,通过对定子绕组通以三相交流电源,产生旋转磁场。
在正转工作状态下,定子绕组通过电源通以三相交流电流,产生旋转磁场。
这个旋转磁场将会感应到转子上的导体环中,并在导体环内部产生感应电流。
由于转子上的导体环是闭合的回路,感应电流将在导体环内部形成闭合回路。
导体环内的感应电流会与定子绕组中的磁场相互作用,产生力矩。
由于磁场是旋转的,因此感应电流所产生的力矩也会使转子跟随旋转磁场一起旋转。
这就是异步电动机正转的原理。
反转工作原理与正转类似,只是磁场的旋转方向相反。
在反转状态下,定子绕组通以三相交流电流,形成旋转磁场,但旋转方向与前述正转状态相反。
相应地,转子上的导体环感应到的磁场也相反。
在这种情况下,转子受到的力矩也与正转相反,使得转子与旋转磁场反方向旋转,实现反转工作。
在实际应用中,异步电动机通常通过控制电源的相序和频率来实现正反转。
要实现正转,电源的相序和频率必须与电动机的设计参数匹配。
相反,要实现反转,相序和频率需要相反。
因此,通过调整电源的相序和频率,可以实现异步电动机的正反转。
总结起来,异步电动机的正反转工作原理是基于电磁感应和旋转磁场的互作用。
通过定子绕组通以三相交流电流,形成旋转磁场,进而感应到转子上的导体环中的感应电流。
这些感应电流与定子绕组的磁场相互作用,产生力矩使得转子跟随旋转磁场一起旋转,实现正反转工作。
机电传动控制定子串电阻启动正反转控制机电传动系统广泛应用于各种工业设备中,其控制方式和技术水平直接影响到设备的运转效率和可靠性。
传统的机电传动控制方式通常采用接触器和继电器,但这种方式容易出现接触不良或损坏等问题,影响系统的运行。
而采用定子串联电阻启动控制方式,可以有效地解决这些问题,提高系统的稳定性和可靠性。
定子串联电阻启动控制原理当单相异步电动机启动时,由于转子的鼠笼形状,在电磁场中会产生转动力矩。
但在起动时,由于电动机转速很低,电动机不能产生足够的转动力矩,需要采用一些辅助措施来增加起动转矩。
这时,可以利用定子串联电阻来实现。
当电动机启动时,首先接通一个大的串联电阻,在启动过程中,根据负载的要求逐渐减小电阻值,最终将电阻完全断开。
这种方式实现了电动机的逐步起动,可以避免过电流的情况发生。
此外,在电动机启动后,如果需要反转或停止,也可以通过控制定子串联电阻达到正反转或停止的目的。
定子串联电阻启动控制的优点与传统的接触器和继电器控制方式相比,定子串联电阻启动控制具有以下优点:1.可靠性高:由于电阻起动控制方式采用定子接线,与接触器和继电器等电器元件相比,不易出现接触不良或损坏的情况,从而提高了系统的稳定性和可靠性。
2.适应性强:定子串联电阻启动控制方式适用于各种容量的电机,无需额外配备控制器,成本更低。
3.控制精度高:定子串联电阻启动控制方式可以精确控制电机的启动和停止过程,避免因负载变化引起的过电流和过载现象。
4.节能环保:起动时通过降低启动电流,节约了能源消耗,符合环保节能要求。
定子串联电阻启动控制的应用定子串联电阻启动控制方式广泛应用于各种工业设备中,尤其适用于起动负载大、惯性大的设备,例如:1.冷凝器:冷凝器压缩机电动机起动负载大,逐渐增加定子串联电阻,可以避免起动过流。
2.电动机泵:电动机泵启动后流量逐渐增大,需要根据负载要求逐渐减小电阻值,以避免过负载。
3.机械切割机:开始切割时需要大的转矩,此时通过增加定子串联电阻来提供较大的转矩。
单相异步电机正反转接线方法
单相异步电机是一种常见的电动机类型,其正反转接线方法是十分重要的。
下面将介绍单相异步电机正反转接线方法。
1. 单相异步电机的基本原理
单相异步电机是利用单相交流电源所产生的交变磁场作用于定子线圈,而使转子线圈产生感应电动势,从而产生转矩,使转子转动。
其中,定子线圈接通单相交流电源后,两相磁场相互作用,形成一个旋转的磁场,而转子内部的导体则受到旋转磁场的作用而产生感应电动势,从而在转子上产生转矩。
2. 单相异步电机正转接线方法
单相异步电机正转接线方法是将电机的两个端子分别接通单相交流电源的正负极,即将电源的一个极连接到电机的一端,另一个极则连接到电机的另一端。
这样,电机就能够顺时针方向旋转。
3. 单相异步电机反转接线方法
单相异步电机反转接线方法是将电机的两个端子交换连接单相交流电源的正负极,即将电源的一个极连接到电机的另一端,另一个极则连接到电机的一端。
这样,电机就能够逆时针方向旋转。
总之,单相异步电机正反转接线方法是十分简单的,只需将电机的两个端子分别接通单相交流电源的正负极,并根据需要交换连接即可实现正反转。
但在实际应用中,需谨慎操作,以免出现危险。
- 1 -。
单相电机正反限位
单相电机的正反限位一般是通过接线端子上的接线来实现的。
在单相电机的接线端子上,通常有两个引脚,分别是“启动”引脚和“运行”引脚。
启动引脚连接电源正极,运行引脚连接电源负极。
当启动引脚连接电源正极,运行引脚连接电源负极时,电机正转;当启动引脚连接电源负极,运行引脚连接电源正极时,电机反转。
因此,通过改变启动引脚和运行引脚的连接方式,就可以实现单相电机的正反转。
限位是为了保护电机和机械设备不受损坏。
在单相电机中,通常会在电机轴上安装一个限位开关,当电机轴转动到一定角度时,限位开关会触发,从而切断电机的电源,防止电机继续运转。
为了实现单相电机的正反限位,可以在电机接线端子上分别接上正转和反转控制线圈,并在电机轴上安装正反限位开关。
当电机启动时,正转控制线圈会被接通,电机正转运行;当电机反转时,反转控制线圈会被接通,电机反转运行。
同时,当电机轴转动到一定角度时,限位开关会触发,切断电机的电源,防止电机继续运转。
单相异步电动机反转
一、工作原理
单相交流电动机只有一个绕组,转子是鼠笼式的。
当单相正弦电流通过定子绕组时,电动机就会产生一个交变磁场,这个磁场的强弱和方向随时间作正弦规律变化,但在空间方位上是固定的,所以又称这个磁场是交变脉动磁场。
这个交变脉动磁场可分解为两个以相同转速、旋转方向互为相反的旋转磁场,当转子静止时,这两个旋转磁场在转子中产生两个大小相等、方向相反的转矩,使得合成转矩为零,所以电动机无法旋转。
当我们用外力使电动机向某一方向旋转时(如顺时针方向旋转),这时转子与顺时针旋转方向的旋转磁场间的切割磁力
线运动变小;转子与逆时针旋转方向的旋转磁场间的切割磁力线运动变大。
这样平衡就打破了,转子所产生的总的电磁转矩将不再是零,转子将顺着推动方向旋转起来。
要使单相电动机能自动旋转起来,我们可在定子中加上一个起动绕组,起动绕组与主绕组在空间上相差90度,起动绕组要串接一个合适的电容,使得与主绕组的电流在相位上近似相差90度,即所谓的分相原理。
这样两个在时间上相差90度的电流通入两个在空间上相差90度的绕组,将会在空间上产生(两相)旋转磁场,如图2所示。
在这个旋转磁场作用下,转子就能自动起动,起动后,待转速升到一定时,借助于一个安装在转子上的离心开关或其他自动控制装置将起动绕组断开,正常工作时只有主绕组工作。
因此,起动绕组可以做成短时工作方式。
但有很多时候,起动绕组并不断开,我们称这种电动机为电容式单相电动机,要改变这种电动机的转向,可由改变电容器串接的位置来实现。
二、正反转接线图
图一
单相电动机要经过分相才能形成旋转磁场。
一般需要有两个绕组,一个是主绕组,另一个就是启动绕组。
两者相差90°电工角。
主绕组直接和L、N相连,启动绕组则串联电容后与电源相连。
这样,启动绕组由于电容有使电流超前于电压的功能,和主绕组的电流产生相位差并形成旋转磁场,使电机启动。
要使电机反转,只要把启动绕组与电源
的接线的头尾对调一下就行了。
上图就起这个作用,启动绕组和电容是通过顺逆开关和电源相连的。
这个电路改变的不是启动绕组的头尾,而是绕组的身份,例如,绕组1和顺向开关相连,绕组2 和逆向开关相连,顺向开关接通时,绕组2就是启动绕组了,电流超前,设为顺向转动。
那么改换接法,接通K逆,这时绕组2就是主绕组了,绕组1成为启动绕组,电流超前,当然就倒过来转啦。
主角和配角轮着来,实在是高啊!。