大型双履带车辆转向性能的研究
- 格式:pdf
- 大小:200.81 KB
- 文档页数:3


一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O作稳定转向的简图,如图7-12所示。
从转向轴线O到车辆纵向对称平面的距离R,称为履带式车辆的转向半径。
以代表轴线O在车辆纵向对称平面上的投影,的运动速度代表车辆转向时的平均速度。
则车辆的转向角速度为:图7-12 履带式车辆转向运动简图(7-37)转向时,机体上任一点都绕转向轴线O作回转,其速度为该点到轴线O的距离和角速度的乘积。
所以慢、快速侧履带的速度和分别为:(7-38)式中:B—履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:(二)双履带式车辆转向动力学1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1)在相同地面条件下,转向行驶阻力等于直线行驶阻力,且两侧履带行驶阻力相等,即:(2)在相同的地面条件和负荷情况下,相当于直线行驶的有效牵引力,即:图7-13 转向时作用在履带车辆上的外力所以回转行驶的牵引平衡关系为:(7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为,在负荷作用下总的转向阻力矩为:(7-40)式中:—牵引点到轴线的水平距离。
如前所述履带车辆转向是靠内、外侧履带产生的驱动力不等来实现的,所以回转行驶时的转向力矩为:(7-41)稳定转向时的力矩平衡关系为:(7-42)为了进一步研究回转行驶特性,有必要对内、外侧驱动力分别加以讨论。
由上可得:(7-43)式中:为在作用下,土壤对履带行驶所增加的反力,亦即转向力,作用方向与驱动力方向相同,以表示。
变形得式:(7-44)令所以。
河南科技大学硕士学位论文履带拖拉机差速转向机构性能分析姓名:曹付义申请学位级别:硕士专业:车辆工程指导教师:周志立2003.4.28履带拖拉机差速转向机构性能分析摘要履带拖拉机的转向机构是其重要的总成之一,其性能的优劣直接影响着履带拖拉机的转向机动性和生产效率。
本文在分析了履带拖拉机差速转向机构传动原理和不同类型的转向机构基础上,重点介绍了履带拖拉机双功率流转向机构的工作原理及其特点。
以东方红l302R履带拖拉机差速转向机构的转向原理、运动学特性、动力学特性(包括功率及效率)分析为特例,给出了实际工况下的设计参数,从而为转向装置总图设计的结构强度和刚度分析奠定了基础,提出的差速转向机构参数(行星排特性参数、液压泵和液压马达的系统压力及排量)的选取原则,为差速转向机构的设计提供了理论方法,并通过对不同类型的差速转向机构的性能分析比较,为转向机构的进一步改进设计提供了建议。
关键词:履带车辆,差速转向机构,运动学,动力学,特性分析塑旦型垫奎兰堡主兰垒笙奎——PERFORMANCEANALYSISOFDIFFERENTIALTURNINGMECHANISMOFCRAWLERABSTRACTTheturningmechanismofthecrawlerisoneoftheimportantassemblies.Theperformancesoftheturningmechanismdirectlyaffectitsmobilityandproductivity.BasedontheanalysisoftransmissiOntheoryofdifferentialturningmechanismofthec姐wleranddifferentkindsofturningmechanism,thispaperemphaticallypresentstherunningtheoryandspecialtiesofdoublepowerflowingturningmechanismofthecrawler.Takingexamplebyturningtheory、kinematicsperformancesandkineticsperformances(includingpowerandefficiency)analysisofdifferentialmechanismofdongfan曲ongl302Rcrawler,thispapergivesoutitsdevisingparametersunderthepracticalcircumstances.Accordinglythepaperestablishsthebaseofmachinerydesignofturningequipmentanditsintensity、rigidityanalysis.Byputtingforwardtheselectingprinciplesofparametersofturningmechanism(parameterofplanetgear、thesystemicpressureanddischargingamountofhydraulicpumpandhydraulicmotor),thepaperpresentsthetheoricalmeansofthisdifferentialmechanismdesign.BythecompareofperformanceanaIysisofdiffbrentkindsofdifferentialmechanism,thispaperofferstheadvicestoitsfurtherimprovingdesign.KEYWoRDS:thecrawler,differentialturningmechanism,kinematics,kinetics,performanceanatysis第一章绪论第一章绪论§1.1履带拖拉机及其转向我国是一个人口众多的农业大国,农业在国民经济发展中始终起着举足轻重的作用。

液压与气动2009年第7期统的模糊PI D 控制比传统的PI D 控制有较小的超调量和较快的响应速度。
参考文献:[1] H ong ren L. i H ydrauli c contro l syste m [M].Be iji ng :N ati onalD efence Industry Press , 1990.[2] 贺云波, 等. 电液伺服系统的完整建模及变尺度多调整因子解析模糊控制[J].机床与液压, 2000(5.[3] 李士勇, 模糊控制和智能控制理论与应用[M].哈尔滨:哈尔滨工业大学出版社, 1990.[4] 韦巍. 智能控制技术[M].北京:机械工业出版社, 2007. [5] 李国勇. 智能控制及其M ATLAB 实现[M ].北京:电子工业出版社, 2005.[6] 顾瑞龙. 控制理论及电液控制系统[M ].北京:机械工业出版社, 1984.[7] Corbe t T. , Sepehr iN. , L aw rence , P. D . . Fuzzy con tro l o f ac l ass o f hydrauli ca lly actuated i ndustr i a l robo ts[J].IEEET ransac ti ons on Control Syste m s T echno logy 1996, 4(4:419-429.履带车辆差速转向机构转向过程动态特性的试验研究荆崇波, 魏超, 刘丁华Experm i ental I nvesti gati on on Steeri ng Characteristic of Trac ked V ehicle w it h Hydrau lic Steeri ng M echanis mJING Cong bo , W E I Chao , LIU D i n g hua(北京理工大学, 北京 100081摘要:阐述了履带车辆转向过程的转向特性以及液压无级差速转向机构的工作原理, 提出了用液压次级动态仿真试验台模拟履带车辆转向过程的试验方案, 在此基础上, 完成了液压无级转向机构的转向性能试验。
双流传动履带车辆转向机构的研究现状及发展趋势孙勇1,2,李文哲1(1.东北农业大学,哈尔滨 150030;2.黑龙江农业职业技术学院,黑龙江佳木斯 154007)摘 要:转向机构是履带车辆的重要组成部分,转向性能是整车性能的重要评价指标,其性能的优劣直接影响着车辆的转向机动性和生产效率。
因此,对性能优良的双流传动转向机构的研究一直是车辆工程领域科研工作者亟待解决的课题。
为此,详细介绍了各种双流传动转向机构的优缺点,分析了新型双流传动转向机构的工作原理和国内外研究现状,提出双流传动履带车辆转向机构的发展趋势。
关键词:农业工程;双流传动;综述;履带车辆;转向;现状;趋势中图分类号:S219.032.3 文献标识码:A 文章编号:1003─188X(2008)03─0235─030 引言最早的综合传动装置转向机构是机械式的,只能实现数目有限的规定转向半径,如美国M48和M60及以色列梅卡瓦(MERKAVA)坦克上所使用的CD-850传动,意大利OF40坦克上所使用的RK304传动,韩国K88式坦克的LSG-3000综合传动装置等。
ZF公司的LSG-3000每一个挡位都具有3个规定转向半径,代表了机械式转向机构的最高水平。
机械式转向机构能够实现的规定转向半径的数目有限、转向效率低、工作不平稳、磨损发热严重,严重地制约了履带车辆转向性能的提高。
所以,现代履带车辆综合传动装置的转向机构基本上都采用无级传动形式。
现代履带车辆转向动力系统为充分利用发动机的功率,节约能源以及获得优良的动力性能最理想的方法是从传统的有级传动发展为无级传动。
随着自动换挡技术的发展和双流传动装置在履带车辆中使用日益增多,提出了双流传动在转向过程中自动换挡这一新课题。
这是对履带车辆在转向行驶期间禁止换挡传统观念的一种革新。
转向期间自动换挡可以防止由于驾驶员经验不足、挡位选择不当而造成的发动机熄火。
同时,对双流传动来说,降挡又可自动调整规定转向半径,保证通过狭窄的转向路段。
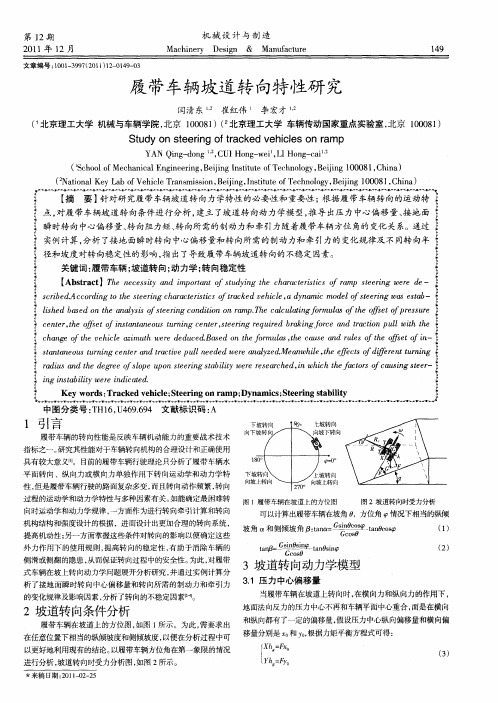
返回Return2010国际农业工程大会论文集大型静定履带行走装置转向性能研究姚宗伟1 王国强1※ 李勇1 邹胜2(1. 吉林大学机械科学与工程学院,长春 130025;2. 大连重工起重集团有限公司,大连 116103)摘 要:本文针对大型静定履带车辆的特点,建立了考虑履带宽度和由于履带车辆质心偏移导致履带接地比压不均匀的车辆稳态转向数学模型,并对模型进行了数值求解,分析了车辆质心偏移和履带宽度对其转向中心的偏移和履带驱动力的影响。
基于多刚体动力学软件RecurDyn建立了某大型履带车辆虚拟样机,并进行了转向仿真实验,仿真结果与数值计算结果吻合较好,验证了理论模型的正确。
为大型静定履带行走装置的设计提供了依据。
关键词:履带车辆;接地比压,履带宽度;转向;数值模拟Study on the Steering Performance of Large Redundant Tracked VehiclesYao Zongwei1 Wang Guoqiang1※Li Yong1Zou Sheng2(1. College of Mechanical Science and Engineering, Jilin University, Changchun, 130022, China;2. DHI﹒DCW GROUP CO., LTD. Dalian, 116103, China)AbstractBased on the characteristics of large redundant tracked vehicles, the mathematical model of steady steering on firm ground is established, taking into account the track width and the uneven grounding pressure caused by the eccentric of the gravity center of the machine, and the numerical solutions are obtained. The influences of the gravity center eccentric and tracked width on the driven force and the machine turning center are analyzed. The virtual prototype of a large redundant tracked vehicle is built based on the multi-body dynamics software RecurDyn. The virtual prototype simulation results are accord well with the numerical ones, which verifies the correction of the theoretical model.Key words:tracked vehicles; grounding pressure; tracked width; steering; numerical simulation引 言斗轮挖掘机、排土机等大型履带机械的特点是:1)只需克服自身的行驶阻力而不另外发出牵引力,履带板平滑无履刺;2)履带接地面积大,履带板的节距也较大,整机质量通过多级平衡梁式履带家静定地分配在各支重轮上,各支重轮的负载仅取决于机器质心的位置。