送料小车PLC控制
- 格式:doc
- 大小:781.75 KB
- 文档页数:20
基于PLC的自动送料小车系统设计
PLC(可编程逻辑控制器)可以用于设计和控制自动送料小车
系统。
下面是基于PLC的自动送料小车系统的设计步骤:
1. 确定系统需求:首先确定自动送料小车系统的功能和性能要求,包括料仓容量、送料速度、送料精度等。
2. 设计电气布置:根据系统需求,设计自动送料小车系统的电气布置图,包括PLC、传感器、执行器(如电机、驱动器等)、电源等的连接关系。
3. 编写PLC程序:根据系统需求和电气布置,编写PLC程序。
PLC程序包括控制逻辑、输入输出设备的配置、控制算法等。
4. 系统控制:根据PLC程序,实现自动送料小车系统的控制
功能,包括送料开始、停止、调速等操作。
5. 传感器和执行器的连接:将传感器和执行器与PLC进行连接,以实现对系统的实时监测和控制。
6. 调试和测试:对自动送料小车系统进行调试和测试,确保系统的正常工作。
7. 优化和改进:根据实际使用情况,对系统进行优化和改进,提高系统的工作效率和稳定性。
8. 文档编写和培训:编写自动送料小车系统的操作文档和维护
手册,并进行相关人员的培训,以确保系统的可操作性和可维护性。
以上是基于PLC的自动送料小车系统的设计步骤,通过PLC 的控制,可以实现自动化的送料过程,提高生产效率和产品质量。
基于PLC的自动送料小车系统设计随着工业生产的不断发展,自动化技术也逐渐得到了广泛应用。
自动化生产可以提高生产效率、降低生产成本并且能够保证生产质量。
在自动生产线上,自动送料小车也成为了必不可少的一环。
本文将围绕着自动送料小车展开,基于PLC设计自动送料小车系统,并详细介绍系统的设计流程及各个模块的编程。
一、需求分析自动送料小车系统是一种自动化供料系统。
其主要功能是在工业生产线上实现工件的自动送达,通常用于物料的搬运和转移等操作。
在实现自动送料小车系统之前,应先分析其需求。
首先,需分析自动送料小车系统的功能:自动供料、满载停车、自动卸货。
其次,应分析小车行驶路线的规划:行驶路径应该合理,车辆应该避免碰撞以及可以在不同的位置巡线等功能。
对于自动送料小车系统,行驶路线应该通过传感器实现不同位置的检测和控制,从而实现自动导航和路径规划。
最后,应分析小车和供料站之间的通信:小车和供料站之间应该保持良好的通信,以便实现自动卸货和检测车辆状态等操作。
二、系统设计方案在需求分析的基础上,本文提出了一种基于PLC的自动送料小车系统设计方案。
本文选用西门子S7-1200系列PLC作为主控制器,在其基础上利用模块化设计思想,将系统分为四个模块:车辆控制模块、供料站控制模块、传感器检测模块、通信控制模块。
2.1 车辆控制模块车辆控制模块是实现自动送料小车物流的核心控制模块。
通过这个模块,整个系统可以实现自动化操作,具有自动导航、路径规划、自动供料、满载停车等功能。
因此,在车辆控制模块中,应该包括以下几个方面的功能设计:1. 结合规划好的地图路线,通过PLC控制车辆的运动轨迹。
2. 通过PLC控制车辆的自动开始、停止及停靠等操作,同时实现供料站卸料。
3. 通过PLC控制车辆的报警及轻微故障修复。
3. 检测车辆是否已经停留在了正确的供料位置并启动卸料工作。
2.3 传感器检测模块传感器检测模块可以通过各种传感器来实现对车辆状态、供料站状态等的全面检测。
plc运料小车控制设计PLC(可编程逻辑控制器)是一种数字电子设备,用于控制自动化机器和过程。
运料小车是指一种用于运送物料的小型车辆,通常用于工业生产线上。
PLC运料小车控制设计是指将PLC技术应用于运料小车的控制系统,以实现对小车运动状态和位置的实时监控和控制。
PLC运料小车控制设计的主要步骤包括:1. 采集运料小车的位置和状态信息。
运料小车的位置和状态信息可以通过编码器、传感器和开关等设备进行采集和传输。
2. 进行位置和状态信息处理。
采集到的位置和状态信息需要进行处理和分析,以便于控制系统进行下一步动作的判断和决策。
4. 设计安全控制系统。
为了确保运料小车运行的安全性,需要设计相应的安全控制系统,并加入紧急停车装置、限位开关等保障措施。
5. 进行可靠性测试。
在完成PLC运料小车控制设计后,需要进行系统的可靠性测试,以确保系统能够稳定运行。
1. 自动化控制。
PLC技术的应用可以实现对小车的自动化控制和管理,减少人工干预的工作量,提高生产效率和质量。
2. 精确控制。
PLC控制系统具有高精度、高可靠性和高稳定性,可以实现对小车运动状态的精确监测和控制,确保生产过程的质量和安全性。
3. 用户友好性。
PLC控制系统的编程语言简单易懂,用户可以快速上手进行相关操作和编程,提高工作效率和效益。
4. 适用范围广泛。
PLC技术可以应用于不同的产业领域,满足各种生产过程的控制要求,如汽车、化工、制造业、纺织等。
1. 选用合适的PLC品牌和型号。
PLC的品牌和型号对系统的性能和稳定性有较大的影响,因此应选择性能稳定可靠的品牌和型号。
2. 确定系统所需要的传感器和开关数量和位置。
不同的系统需要不同数量和位置的传感器和开关,应根据实际情况设计。
3. 确定控制系统的工作模式和控制规则。
根据生产过程的实际需求,确定系统的工作模式和控制规则,以实现运料小车的自动化控制。
4. 配置与调试PLC控制系统。
配置PLC控制器和各种传感器并进行系统调试,确保系统的稳定性和可靠性。
运料小车PLC控制的应用原理1. 概述本文档将介绍运料小车PLC(可编程逻辑控制器)控制的应用原理。
运料小车是一种用于运输物料的机械设备,通过PLC控制,能够实现自动化的运输和搬运功能。
本文将重点介绍PLC控制系统的硬件组成和工作原理,并提供一个示例程序说明PLC控制运料小车的具体实现方法。
2. PLC控制系统硬件组成PLC控制系统通常由以下几个主要组成部分组成:•PLC主机:负责接收输入信号、执行控制逻辑并输出控制信号的核心设备。
•输入/输出模块:用于连接传感器、执行器等外部设备与PLC主机之间的接口模块,将外部信号输入到PLC主机,并将PLC主机输出的控制信号传送给外部设备。
•电源模块:为PLC主机和其他模块提供电力供应。
•编程端口:用于编程和调试PLC控制程序的接口。
3. PLC控制系统工作原理PLC控制系统的工作原理如下:1.输入信号采集:PLC控制系统通过输入模块连接传感器等外部设备,可以获取物料位置、速度、传感器状态等输入信号。
2.控制逻辑执行:基于输入信号,PLC主机中的控制逻辑程序会根据预设的算法和规则进行判断和计算,并产生相应的输出控制信号。
3.输出信号控制:PLC控制系统通过输出模块连接执行器等外部设备,将PLC主机产生的控制信号传送到相关设备,如运动控制器、电动机驱动器等。
这些设备根据信号进行动作,并完成物料运输、搬运等操作。
4. PLC控制运料小车示例程序下面是一个示例程序,演示了如何使用PLC控制运料小车的运输过程。
1. 初始化:- 启动电源- 等待输入信号2. 判断当前状态:- 如果传感器信号为料仓有物料,则执行步骤3- 如果传感器信号为料仓无物料,则执行步骤43. 运输物料:- 控制运料小车启动并向指定位置运动- 到达目标位置后,停止运动- 等待输入信号4. 等待物料进料:- 等待输入信号- 如果传感器信号为料仓有物料,则执行步骤3- 如果传感器信号为料仓无物料,则循环执行步骤45. 关闭系统:- 停止运料小车的运动- 断开电源供应5. 总结本文介绍了运料小车PLC控制的应用原理。
基于plc的运料小车控制设计
运料小车控制系统是一个通过PLC控制的自动化系统,用于控制小车的运动、停止和转向等行为。
该控制系统主要由以下部分组成:
1. 传感器:传感器用于检测小车的位置和方向,例如光电开关、接近开关、编码器等,并将传感器信号发送给PLC。
2. PLC:PLC是运料小车控制系统的核心部分,它接收传感器信号、处理控制逻辑、发出控制信号以控制小车运动、停止和转向等行为。
3. 电机驱动器:电机驱动器用于控制小车的电机,包括启动、停止和控制速度等功能,可以直接接入PLC中。
4. 操作面板:操作面板用于操作和监控整个控制系统,包括显示小车位置、方向和速度等信息,可以与PLC进行通信。
运料小车控制系统的具体设计如下:
1. 确定PLC型号和输入输出配置。
2. 安装传感器并将其接入到PLC的输入端口上,如接近开关和编码器。
3. 设计控制逻辑并编写PLC程序,包括小车的运动、停止和转向等控制逻辑。
4. 安装电机驱动器并将其接入到PLC的输出端口上。
5. 设计操作面板并编写人机界面程序,包括小车位置、方向和速度等显示信息。
6. 调试控制系统并进行实际运行测试,确保系统能够正常工作。
总之,基于PLC的运料小车控制设计是一种实用、高效的自动化控制系统,能够有效控制小车的运动、停止和转向等行为,提高物流运输的效率和精度。
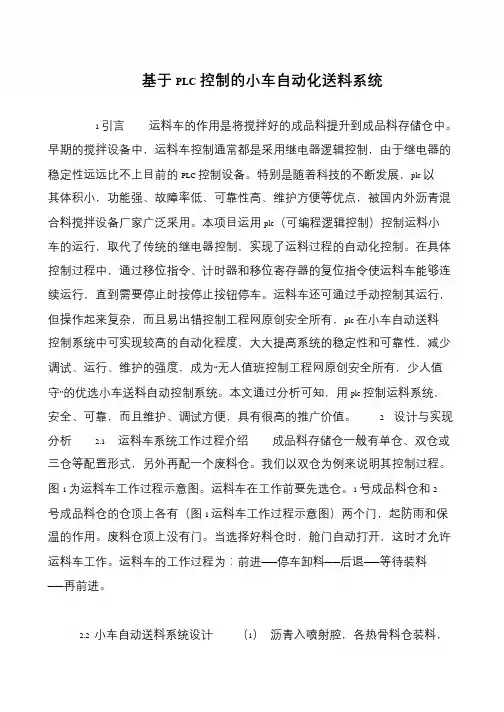
基于PLC控制的小车自动化送料系统1 引言运料车的作用是将搅拌好的成品料提升到成品料存储仓中。
早期的搅拌设备中,运料车控制通常都是采用继电器逻辑控制,由于继电器的稳定性远远比不上目前的PLC 控制设备。
特别是随着科技的不断发展,plc 以其体积小,功能强、故障率低、可靠性高、维护方便等优点,被国内外沥青混合料搅拌设备厂家广泛采用。
本项目运用plc(可编程逻辑控制)控制运料小车的运行,取代了传统的继电器控制,实现了运料过程的自动化控制。
在具体控制过程中,通过移位指令、计时器和移位寄存器的复位指令使运料车能够连续运行,直到需要停止时按停止按钮停车。
运料车还可通过手动控制其运行,但操作起来复杂,而且易出错控制工程网原创安全所有,plc 在小车自动送料控制系统中可实现较高的自动化程度,大大提高系统的稳定性和可靠性,减少调试、运行、维护的强度,成为“无人值班控制工程网原创安全所有,少人值守”的优选小车送料自动控制系统。
本文通过分析可知,用plc 控制运料系统,安全、可靠,而且维护、调试方便,具有很高的推广价值。
2 设计与实现分析 2.1 运料车系统工作过程介绍成品料存储仓一般有单仓、双仓或三仓等配置形式,另外再配一个废料仓。
我们以双仓为例来说明其控制过程。
图1 为运料车工作过程示意图。
运料车在工作前要先选仓。
1 号成品料仓和2 号成品料仓的仓顶上各有(图1 运料车工作过程示意图)两个门,起防雨和保温的作用。
废料仓顶上没有门。
当选择好料仓时,舱门自动打开,这时才允许运料车工作。
运料车的工作过程为:前进——停车卸料——后退——等待装料——再前进。
2.2 小车自动送料系统设计(1)沥青入喷射腔,各热骨料仓装料,。
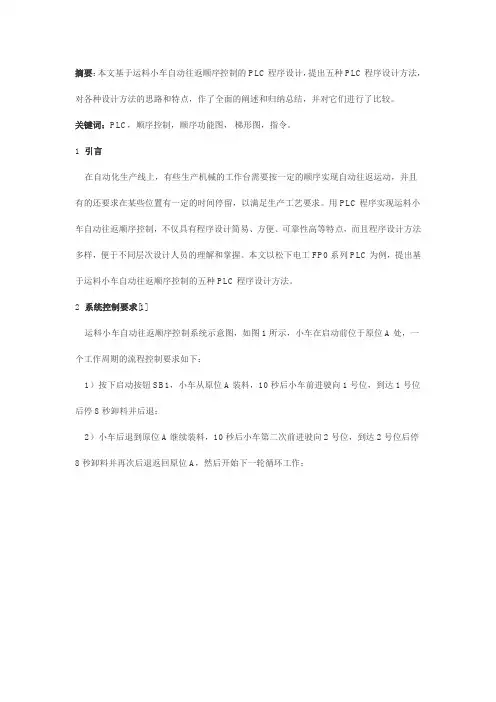
摘要:本文基于运料小车自动往返顺序控制的PLC程序设计,提出五种PLC程序设计方法,对各种设计方法的思路和特点,作了全面的阐述和归纳总结,并对它们进行了比较。
关键词:PLC,顺序控制,顺序功能图,梯形图,指令。
1 引言在自动化生产线上,有些生产机械的工作台需要按一定的顺序实现自动往返运动,并且有的还要求在某些位置有一定的时间停留,以满足生产工艺要求。
用PLC程序实现运料小车自动往返顺序控制,不仅具有程序设计简易、方便、可靠性高等特点,而且程序设计方法多样,便于不同层次设计人员的理解和掌握。
本文以松下电工FP0系列PLC为例,提出基于运料小车自动往返顺序控制的五种PLC程序设计方法。
2 系统控制要求[1]运料小车自动往返顺序控制系统示意图,如图1所示,小车在启动前位于原位A处,一个工作周期的流程控制要求如下:1)按下启动按钮SB1,小车从原位A装料,10秒后小车前进驶向1号位,到达1号位后停8秒卸料并后退;2)小车后退到原位A继续装料,10秒后小车第二次前进驶向2号位,到达2号位后停8秒卸料并再次后退返回原位A,然后开始下一轮循环工作;3)若按下停止按钮SB2,需完成一个工作周期后才停止工作。
图3运料小车自动往返顺序控制系统顺序功能图4.1 经验设计法[3]经验设计法是根据生产机械的工艺要求和生产过程,在典型单元程序的基础上,做一定的修改和完善。
使用经验设计法设计的梯形图程序,如图4所示。
根据系统控制要求小车在原位A(X2)处装料,在1号位(X3)和2号位(X4)两处轮流卸料。
小车在一个工作循环中有两次前进都要碰到X3,第一次碰到它时停下卸料,第二次碰到它时要继续前进,因此应设置一个具有记忆功能的内部继电器R1,区分是第一次还是第二次碰到X3。
小车在第一次碰到X3和碰到X4时都应停止前进,所以将它们的常闭触点与Y2的线圈串联,同时,X3的常闭触点并联了内部继电器R1的常开触点,使X3停止前进的作用受到R1的约束,R1的作用是记忆X3是第几次被碰到,它只在小车第二次前进经过X3时起作用。
一、控制要求1. 1 控制对象介绍自动送料装车系统是用于物料输送流水线设备, 关键是用于煤粉、细砂等材料运输。
自动送料装车系统通常是由给料器、传送带、小车等单体设备组合来完成特定过程。
这类系统控制需要动作稳定, 含有连续可靠工作能力。
经过三台电机和三个传送带、料斗、小车等配合, 才能稳定、有效率地进行自动送料装车过程。
以下图所表示:1. 2 控制原理自动送料装车系统是经过电机和限位开关来控制。
称重开关S2控制汽车开来或开走。
三台电机控制三个传送带。
进料开关K1控制控制进料是否。
检测开关S1控制料斗中物料空满。
另外, 在S2处增设两个七段数码管, 用来统计每日装车数。
装车数统计采取脉冲计数方法进行。
脉冲计数方法是当装料车装满时S2断开后, 开始定时放送脉冲;当S2闭合时停止发送脉冲。
一个脉冲宽度即为一辆汽车。
用两个数码管计数, 所计数即为装车数。
当S2接通时, 红灯L1亮, 绿灯L2灭, 传送电动机M3运行, 传送电动机M2延迟M3电动机2S运行, 送料电动机M1延迟M2电动机2S运行, 料斗K2延迟M2电动机2S打开出料。
当料满后(S2断开后), 料斗K2关闭, 电动机M1延时2S 后关断, M2在M1停后2S后停止, M3在M2停止后2S后停止, L2灯亮, L1灯灭, 此时汽车能够开走。
1. 3 自动送料装车系统启停过程示意图该图中从上到下是开启次序, 从下到上是停止次序。
1. 4 控制要求初始状态:红灯L1灭, 绿灯L2亮, 表示许可汽车开进装料, 料斗K2, 电动机M1, M2, M3皆为OFF。
当汽车到来时(S2接通表示), L1亮, L2灭, M3运行, 电动机M2在M3通2S后运行, M1在M2通2S后运行, K2在M1通2S后打开出料。
当物料满后(用S2断开表示), 料斗K2关闭, 电动机M1延时2S后关断, M2在M1停2S后停止, M3在M2停2S后停止, L2亮, L1灭, 表示汽车能够开走。
基于PLC的自动送料小车控制系统设计摘要随着科学技术的日新月异,自动化程度要求越来越高,原有的生产送料装置远远不能满足当前高度自动化的需要。
减轻劳动强度,保障生产的可靠性、安全性,降低生产成本,减少环境污染、提高产品的质量及经济效益是企业生成所必须面临的重大问题。
本文从第一章送料小车的系统方案的确定为切入点,介绍了为什么选用PLC控制小车;第二章介绍了送料小车的应达到的自动化运行控制要求;第三章根据控制要求介绍了送料小车控制系统的硬件设计;第四章根据控制要求进行了小车系统的软件设计,梯形图(分段设计说明和系统总梯形图)和程序指令设计;最后得出PLC控制的自动送料小车的可执行性设计结论。
我们为各个送料生产领域所生产的可编程控制器送料系统。
它集成自动控制技术、计量技术、新传感器技术、计算机管理技术于一体的机电一体化产品;充分利用计算机技术对生产过程进行集中监视、控制管理和分散控制;充分吸收了分散式控制系统和集中控制系统的优点,采用标准化、模块化、系统化设计,配置灵活、组态方便。
关键词: PLC;送料小车;控制;程序设计;目录前言 (1)第一章控制系统介绍和控制过程要求 (2)1.1 控制系统在送料小车中的作用与地位 (2)1.2 控制系统介绍 (2)第二章送料小车系统方案的选择 (4)2.1 可编程控制器 PLC的优点 (4)2.2 小车送料系统方案的选择 (5)第三章送料小车控制系统的硬件设计 (6)3.1 PLC的选型 (6)3.2 现场检测装置的选型 (6)3.3 硬件线路设计 (9)第四章送料小车控制系统的软件设计 (11)4.1 STEP7-Micro/WIN32编程软件介绍 (11)4.1.1 基本功能 (11)4.1.2 其他功能 (11)4.2 送料小车PLC的 I/O分配表 (13)4.3 梯形图程序设计 (13)4.4 程序运行原理说明调试与完善 (18)第五章送料小车系统调试与仿真 (28)5.1 系统调试 (28)5.2 系统仿真 (28)参考文献 (29)结论 (30)谢辞 (31)前言随着社会迅速的发展,各机械产品层出不穷。
电气与PLC控制技术课程设计题目:PLC在4位送料小车方向自动控制中的应用学院:专业班级:姓名:学号:指导老师:PLC在4位送料小车方向自动控制中的应用摘要:可编程序控制器(Programmable controller)简称PLC,由于PLC可靠性高、环境适应性强、灵活通用、使用方便、维护简单,所以PLC的应用领域不断迅速扩大。
对早期的PLC,凡是有继电器的地方,都可采用。
尤其是近几年来,PLC的成本下降,功能又不段增强,所以,目前PLC在国内外已被广泛应用于各个行业。
本设计是为了实现送料小车的手动和自动化的转化,改变以往小车的单纯手动送料,减少了劳动力,提高了生产效率,实现了自动化生产!而且本送料小车的设计是由于工作环境恶劣,不允许人进入工作环境的情况下孕育而成的。
关键字:PLC;送料小车;自动化前言:自动控制系统已被广泛应用于人类社会的各个领域。
在工业方面,对于冶金、化工、机械制造等生产过程中遇到的各种物理量,包括温度、流量、压力、厚度、张力、速度、位置、频率、相位等,都有相应的控制系统。
在此基础上通过采用数字计算机还建立起了控制性能更好和自动化程度更高的数字控制系统,以及具有控制与管理双重功能的过程控制系统。
在农业方面的应用包括水位自动控制系统、农业机械的自动操作系统等。
在军事技术方面,自动控制的应用实例有各种类型的伺服系统、火力控制系统、制导与控制系统等。
在航天、航空和航海方面,除了各种形式的控制系统外,应用的领域还包括导航系统、遥控系统和各种仿真器。
此外,在办公室自动化、图书管理、交通管理乃至日常家务方面,自动控制技术也都有着实际的应用。
随着控制理论和控制技术的发展,自动控制系统的应用领域还在不断扩大,几乎涉及生物、医学、生态、经济、社会等所有领域。
运料小车是工业运料的主要设备之一。
广泛应用于自动生产线冶金、有色盒属、煤矿、港口、码头等行业,各工序之间的物品常用有轨小车来转运。
小车通常采用电动机驱动,电动机正转小车前进,电动机反转小车后退。
基于PLC控制的运料车摘要随着当代科技的高速发展,人们的生活越来越智能化。
人们为了提高劳动效力,在许多的工厂都将运料小车、机械手运用于现代化生产。
将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用。
PLC在运料小车、机械手控制系统中的应用,已经在国内外工程、工厂中得到实际应用,具有巨大的经济和社会价值,其智能化和自动化的思路值得以后继续深入研究和推广。
本课主要研究PLC控制的运料小车和机械手,实现机械手向运料小车上自动搬运物和运料小车的定点呼叫。
机械手可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键字:PLC;运料小车控制系统;机械手AbstractWith the rapid development of modern science and technology, the life of people more and more intelligent. Many people in order to improve the labor force, the factory will ship the cart, the manipulator used in modern production.Applying PLC to haul the car electric control system, which can realize automatic control of the material car, reduce the operation cost of the system. PLC application in the transport cart, manipulator control system, has practical application in the engineering, factories at home and abroad, has tremendous economic and social value, the intelligent and automation concept after the further research and promotion.This course mainly study material handling vehicles and manipulator PLC control, to realize automatic manipulator to haul the car on the fixed-point call handling and delivery the car. Robots can replace artificial to operate at high temperatures and dangerous areas, and can according to the requirement of the change and movement of the work piece process at any time change the related parameters..Key words :PLC ; control system for transporter cart ;manipulator目录1.绪论 (4)1.1控制系统在运料小车和机械手中的作用与地位 (4)1.2 控制系统的介绍 (4)1.2.1 整体法案的选择 (4)1.2.2可编程器PLC的特点 (5)1.2.3运料小车在国内外研究的现状和发展前景 (6)1.2.4课题的主要内容 (6)2 PLC的简介 (7)2.1 PLC的由来 (7)2.2 PLC的定义 (7)2.3 PLC的基本组成及各部分作用 (8)2.4 PLC的工作原理 (10)2.5 PLC的特点和应用 (12)3 基于PLC控制的运料小车及其机械手 (15)3.1 控制对象的介绍 (15)3.1.1机械手 (16)3.1.2 运料小车 (16)3.2 运作示意图及其控制要求 (17)3.2.1机械手在运料小车中的自动控制 (17)3.2.2运料小车的自动控制 (18)3.3 控制程序设计 (19)3.3.1 机械手在运料小车中的自动控制 (19)3.3.2 运料小车的自动控制 (23)4 设计总结 (31)4.1小车的优缺点分析 (31)4.2设计的改进及推广 (31)4.3 常见故障及排除方法 (31)致谢 (33)附录 (34)参考文献 (39)1.绪论1.1控制系统在运料小车和机械手中的作用与地位在现代化工业生产中,为了提高劳动生产率,降低成本,减轻工人的劳动负担,要求整个工艺生产过程全盘自动化,这就离不开控制系统。
目 录 1设计任务与要求 ........................................................ 1 1.1课程设计任务 .................................................... 1 1.2课程设计要求 .................................................... 1 2 设计方案 ............................................................. 3 2.1运料小车的运动分析 .............................................. 3 2.2设备控制要求 .................................................... 4 2.3整体方案论证 .................................................... 4 2.4系统资源分配 .................................................... 5 2.4.1 I\ O地址分配 ............................................ 5 2.4.2 数字量输入部分 ........................................... 5 2.4.3 数字量输出部分 ........................................... 6 3硬件电路设计 .......................................................... 7 4软件设计 .............................................................. 9 4.1.1 梯形图 ................................................... 9 4.1.2 指令表 .................................................. 12 5 调试过程 ............................................................ 14 5.1呼叫按钮 ....................................................... 14 5.2行程开关 ....................................................... 14 5.3比较 ........................................................... 15 5.4向左运动 ....................................................... 15 5.5向右运动 ....................................................... 15 5.6调试操作 ....................................................... 15 6 结论 ................................................................ 17 参考文献 .............................................................. 18 1设计任务与要求 1.1课程设计任务 任务描述 某自动生产线上运料小车的运动如图所示,运料小车由一台三相异步电动机拖动
电动机正转,小车右行,电机反转,小车左行。在生产线上有5个编码为1~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫开关(SB1~SB5)分别与5个停靠点相对应。
1.2课程设计要求 (1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作; (2)当小车当前所处停靠站的编码小于呼叫按钮SB的编码时,小车向右运行,运行到呼叫按钮SB所对应的停靠站时停止; (3)当小车当前所处停靠站的编码大于呼叫按钮SB的编码时,小车向左行,运行到呼叫按钮SB所对应的停靠站时停止; (4)当小车当前所处停靠站的编码等于呼叫按钮SB的编码时,小车保持不动; (5)呼叫按钮开关SB1~SB5应具有互锁功能,先按下者优先。 (6)设计PLC硬件电器连接图。 (7)设计PLC控制程序(梯形图或指令程序)。 2 设计方案
2.1运料小车的运动分析 某自动生产线上运料小车的运动如图2-1所示:
图2-1运料小车示意图 运料小车由一台三相异步电动机拖动,电机正转,小车向右行,电机反转,小向左行。电动机正反转图如图2所示:
图2-2三相异步电动机正反转主电路图
在生产线上有5个编号为l~5的站点供小车停靠,在每一个停靠站
自动化生产1号____2号4号3号站 5号站
运料小车 安装一个行程开关以监测小车是否到达该站点。对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫按钮开关(SB1~SB5)分别与5个停靠站点相对应。
2.2设备控制要求 运料小车在自动化生产线上的控制要求如下; (1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作; (2)当小车当前所处停靠站的编码小于呼叫按钮HJ的编码时,小车向右运行,运行到呼叫按钮HJ所对应的停靠站时停止; (3)当小车当前所处停靠站的编码大于呼叫按钮HJ的编码时,小车向左运行,运行到呼叫按钮HJ所对应的停靠站时停止; (4)当小车当前所处停靠站的编码等于呼叫按钮HJ的编码时,小车保持不动; (5)呼叫按钮开关HJI~HJ5应具有互锁功能,先按下者优先。
2.3整体方案论证 按照设计要求,只是控制小车正转和反正,所以采用经验设计法。控制系统图如图2-3所示:
图2-3 运料小车控制系统图 根据系统控制要求,分析出如下系统控制流程图: 图 2-4 控制系统流程图 2.4系统资源分配 2.4.1 I\ O地址分配
由于CPU模块有14点数字量输入,10点数字量输出,所以不再需要输入\输出模块。采用I\O自动分配方式,模块上的输入端子对应的输入地址是I0.0~I1.3,输出端子对应的输出地址是 Q0.0~Q0.9
2.4.2 数字量输入部分
这个控制系统的输入有启动按钮开关、停止按钮开关、5个呼叫按钮开关、5个行程开关共12点输入。具体的输入分配如表3-4所示: 输入地址 对应的外部设备 I0.0 启动按钮开关 I0.1 停止按钮开关 I0.2 1号站呼叫按钮开关 I0.3 2号站呼叫按钮开关 I0.4 3号站呼叫按钮开关 I0.5 4号站呼叫按钮开关 I0.6 5号站呼叫按钮开关 I0.7 1号站行程开关 I1.0 2号站行程开关 I1.1 3号站行程开关 I1.2 4号站行程开关 I1.3 5号站行程开关 表2-1 输入地址分配
2.4.3 数字量输出部分
这个控制系统需要控制的外部设备只有控制小车运动的三相电动机。但是电机有正转和反转两种状态,分别对应正转继电器和反转继电器,所以输出点有2个。具体的输出分配表如表3-5所示:
输出地址 对应外部设备 Q0.0 电机反转继电器 Q0.1 电机正转继电器 表2-2 输出地址分配 3硬件电路设计 系统硬件接线图如图3-1、3-2所示:
M 图3-1 主电路
I0.0I0.1I0.2I0.3I0.4I0.5I0.6I0.7I1.0I1.1I1.2I1.3MSB1L1L+M+
N1L
KM1SB7SB2SQ1SQ2SQ3SQ4SQ5SB3SB4SB5SB6KM2HLQ0.0Q0.2Q0.1
I1.4FR
LN
AC220
S7-200DC12V
图3-2系统接线图 图中KM1 和KM2 分别是控制电机正转运行(小车前进)和反转运行(小车后退)的交流接触器。用KM1 和KM2 的主触点改变进入电动机的三相电源的相序, 即可以改变电动机的旋转方向。图中KM1 的线圈串联了KM2 的辅助常闭触点,KM2 的线圈串联了KM1的辅助常闭触点,组成了硬件互锁电路。可以避免由于正反转(小车前进、后退)切换过程中电感的延时作用,导致原来接通的接触器的主触点还未断弧时, 另一个接触器的主触点已经合上而造成交流电源瞬间短路的故障。通过主电路与PLC 的控制电路的接线, 才能实现PLC 对系统的控制。 4软件设计 4.1.1 梯形图 写出送料小车的梯形图,如下图所示: 4.1.2 指令表 由系统总梯形图,我们写出送料小车的程序指令,如下图所示: 5 调试过程 5.1呼叫按钮 在该程序中,5个站的呼叫按钮分别用数字1-5来表示。当按下1号站呼叫按钮开关时,行程开关I0.2得电,数字1传送到VB0;当按下2号站呼叫按钮开关时,行程开关I0.3得电,数字2传送到VB0;依次类推,当按下5号站呼叫按钮开关时,行程开关I0.6得电,数字5传送到VB0。
5.2行程开关 在该程序中,5个站的行程开关分别用数字1-5来表示。当小车在1号站时,行程开关I0.7得电,将数字1传送到VB0;当小车在2号站时,行程开关I1.0得电,将数字2传送到VB0。依次类推,当小车在5号站时,行程开关I1.3得电,将数字5传送到VB1。