安川焊接机器人编程
- 格式:docx
- 大小:145.64 KB
- 文档页数:5
安川焊接机器人编程一、开机。
1、打开控制柜上的电源开关在“ON”状态。
2、将运作模式调到“TEACH”→“示教模式下”二、焊接程序编辑。
1.进入程序编辑状态:1.1.先在主菜单上选择[程序]一览并打开;1.2.在[程序]的主菜单中选择[新建程序]1.3.显示新建程序画面后按[选择]键1.4.显示字符画面后输入程序名现以“TEST”为新建程序名举例说明;1.5.把光标移到字母“T”、“E”“S”、“T”上按[选择]键选中各个字母;1.6.按[回车]键进行登录;1.7.把光标移到“执行”上并确认后,程序“TEST”被登录,并且屏幕画面上显示该程序的初始状态“NOP”、“END”2.编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001);2.1. 握住安全电源开关,接通伺服电源机器人进入可动作状态;2.2.用轴操作键将机器人移动到开始位置(开始位置设置作业准备位置);2.3.按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,‘MOVJ“→”“MOVJ,,VJ=0.78”2.4.光标放在“00000”处,按[选择]键;2.5.把光标移动到右边的速度“VJ=**”上,按[转换]键+光标“上下”键,设定再现速度,若设定速度为50%时,则画面显示“→MOVJ VJ=50%”,也可以把光标移到右边的速度,‘VJ=***'上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车]键确认。
2.6.按[回车]键,输入程序点(即行号0001)欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习资料等等打造全网一站式需求。
安川焊接编程一、引言本文档旨在提供有关安川焊接编程的详细说明和指导。
它包含了使用安川焊接进行编程的基本步骤,以及一些常见问题的解决方法。
本文档适用于初学者和有一定编程经验的用户。
如果您是第一次接触安川焊接编程,请务必详细阅读本文档。
二、编程概述1、安川焊接编程的基本原理1.1 编程的目的和意义1.2 安川焊接编程的基本概念1.3 编程语言和工具的选择2、焊接工艺参数的设置2.1 焊接工艺参数的定义和影响因素2.2 安川焊接中的工艺参数设置方法3、编程环境的搭建3.1 安装和配置编程软件3.2 连接焊接与编程软件3.3 创建新的编程项目4、姿态和路径编程4.1 坐标系的定义和标定4.2 姿态和路径的描述方法和坐标系选择4.3 基本的姿态和路径编程指令5、运动与逻辑控制5.1 运动模式和方式的选择5.2 逻辑控制指令的使用5.3 循环控制和条件判断的编程方法6、焊接过程监控与调试6.1 实时监控焊接过程参数6.2 错误处理和调试方法6.3 问题排除和优化三、附件本文档附带以下附件,以供参考:- 安川焊接编程示例代码- 安川焊接编程教学视频四、法律名词及注释1、:指能够自动执行某种任务的可编程设备,通常由机械、电气和计算机系统组成。
2、焊接:指将两个或多个工件通过熔化和凝固的方式连接在一起的加工方法。
3、工艺参数:指在焊接过程中可以进行调整的相关参数,如焊接电压、电流、速度等。
4、坐标系:指用于描述位置和姿态的一组参考轴线。
5、编程软件:指用于编写和管理程序的计算机应用程序。
6、姿态编程:指通过定义的位姿(位置和姿态)来描述的动作。
7、路径编程:指通过定义的路径来描述的运动轨迹。
8、运动模式:指执行任务时使用的运动类型,如直线运动、圆弧运动等。
9、逻辑控制:指编程中使用的条件判断、循环控制等语句来控制的行为。
安川机器人编程实例引言:随着科技的不断发展,机器人技术在工业生产中的应用越来越广泛。
安川机器人是目前市场上较为知名的工业机器人品牌之一,其在生产线上的灵活应用,为企业提高了生产效率和产品质量。
本文将以安川机器人编程实例为主题,介绍一些安川机器人的编程案例,以展示其在工业生产中的优势和应用。
一、安川机器人编程实例之物料搬运在工业生产中,物料搬运是一个重要的环节。
传统的物料搬运方式通常需要人工操作,效率低下且存在安全隐患。
而利用安川机器人进行物料搬运,不仅能提高效率,还能减少人力成本和安全风险。
以汽车生产线为例,通过安川机器人编程,可以实现对汽车零部件的搬运。
在编程过程中,首先需要对工作区域进行设置,确定机器人的工作范围和路径规划。
然后,通过编写适当的代码,指导机器人准确地抓取零部件,并将其移动到指定位置。
整个搬运过程可以实现自动化操作,提高生产效率和准确性。
二、安川机器人编程实例之焊接焊接是许多行业中常见的工艺,传统的焊接操作需要经验丰富的焊工进行操作,费时费力且存在质量不稳定的问题。
而利用安川机器人进行焊接,可以实现高精度、高效率和一致性的焊接过程。
在安川机器人编程中,焊接任务首先需要进行工艺规划和路径规划。
然后,通过编写相应的代码,指导机器人完成焊接动作。
在焊接过程中,机器人可以根据预设的参数和程序,准确地控制焊接电弧的强度和位置,保证焊接质量。
此外,安川机器人还可以通过激光传感器等装置,实时检测焊缝的质量,避免焊接缺陷的出现。
三、安川机器人编程实例之装配在产品装配过程中,安川机器人编程可以实现零部件的自动装配,提高装配效率和产品质量。
以家电行业为例,通过安川机器人编程,可以实现家电产品的自动组装,减少人工操作和装配错误。
在安川机器人编程中,装配任务需要进行工艺规划和路径规划。
通过编写适当的代码,指导机器人按照预设的程序,将零部件进行精准的组装。
在装配过程中,机器人可以根据传感器的反馈信息,判断零部件的位置和状态,并进行相应的调整和修正。



安川机器人焊接设备作业指导书一、焊接设备安全操作1. 操作人员必须经过专业培训,并获得操作资格证书。
2. 操作前,确认机器人及其周边环境是否安全,各部件是否完好无损。
3. 严格按照制造商提供的操作手册进行操作,不得擅自更改程序和参数。
4. 在操作过程中,保持警觉,避免因疲劳或疏忽造成意外。
二、机器人编程与操作1. 根据焊接任务的要求,使用相应的编程语言(如MELFA-IRC5)进行编程。
2. 确保编程的正确性和安全性,避免因程序错误导致机器人误动或意外。
3. 在操作过程中,根据需要调整机器人的运动轨迹和姿态,确保焊接质量。
4. 密切关注机器人的运行状态,避免因机器人故障造成意外。
三、焊接工艺参数设定1. 根据焊接材料和厚度,选择合适的焊接工艺参数(如电流、电压、速度等)。
2. 根据实际情况,对焊接参数进行调整和优化,确保焊接质量和效率。
3. 定期检查和调整焊接设备,确保其工作状态良好。
4. 在焊接过程中,密切关注焊接质量,发现问题及时调整参数或暂停操作。
四、焊接程序优化与调试1. 根据实际需要,对焊接程序进行优化和调试,提高焊接效率和产品质量。
2. 在调试过程中,注意安全,避免因程序错误导致机器人误动或意外。
3. 对调试结果进行分析和总结,发现问题并及时解决。
4. 在优化和调试过程中,注意保护焊接程序的版权和保密性。
五、维护与保养1. 根据制造商提供的要求,定期对机器人及其周边设备进行保养和维护。
2. 在保养过程中,注意检查各部件的磨损和损坏情况,及时更换损坏部件。
3. 对机器人的关节和移动部件进行清洁和润滑,确保其正常运转。
4. 定期检查电气部件和线路,确保其工作状态良好。
六、故障排除与应急处理1. 在操作过程中,如遇故障或意外情况,应立即停机并报告给技术人员或维修人员。
2. 根据制造商提供的技术手册或维修指南,进行故障排除和应急处理。
3. 对常见的故障和问题进行归纳和总结,以便在后续操作中避免类似情况的发生。


安川焊接机器人编程
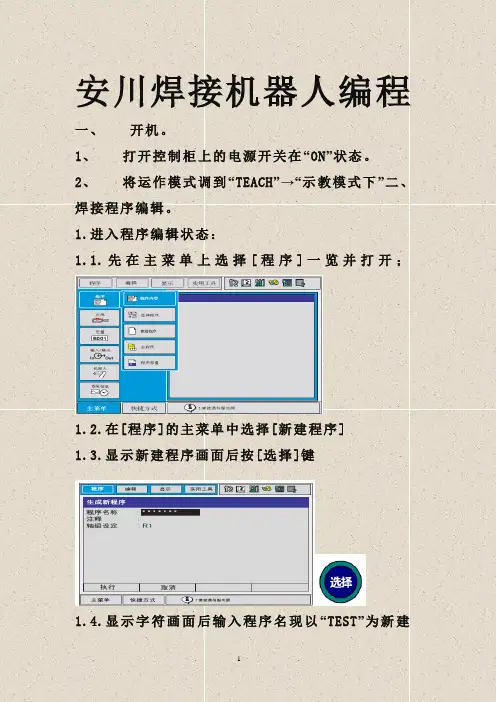
一、? ? 开机。
1、打开控制柜上的电源开关在“ON”状态。
2、将运作模式调到“TEACH”→“示教模式下”
二、焊接程序编辑。
1.进入程序编辑状态:
1.1.先在主菜单上选择[程序]一览并打开;
1.2.在[程序]的主菜单中选择[新建程序]
1.3.显示新建程序画面后按[选择]键
1.4.显示字符画面后输入程序名现以“TEST”为新建程序名举例说明;
1.5.把光标移到字母“T”、“E”“S”、“T”上按[选择]键选中各个字母;
1.6.按[回车]键进行登录;
1.7.把光标移到“执行”上并确认后,程序“TEST”被登录,并且屏幕画面上显示该程序的初始状态“NOP”、“END”
2.编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001);
2.1. 握住安全电源开关,接通伺服电源机器人进入
可动作状态;
2.2.用轴操作键将机器人移动到开始位置(开始位置
设置作业准备位置);
2.3.按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,
‘MOVJ“→”“MOVJ,,VJ=0.78”
2.4.光标放在“00000”处,按[选择]键;
2.5.把光标移动到右边的速度“VJ=**”上,按[转换]键+光标“上下”键,设定再现速度,若设定速度为50%时,则画面显示“→MOVJ VJ=50%”,也可以把光标移到右边的速度,‘VJ=***'上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车]键确认。
2.6.按[回车]键,输入程序点(即行号0001)。