机械设计基础第三章 平面连杆机构
- 格式:ppt
- 大小:3.32 MB
- 文档页数:105
返回目录第 3章平面连杆机构设计3.1教学基本要求1. 了解组成铰链四杆机构的各构件的名称;熟悉铰链四杆机构的基本形式、应用和演化;掌握行程速比系数、传动角、压力角、死点等的基本概念。
2. 能根据四杆机构中存在曲柄的条件,熟练判断出平面四杆机构的基本类型。
3. 了解平面四杆机构设计通常采用的作图法、解析法、实验法和图谱法。
掌握按行程速比系数、给定连杆位置和给定两连架杆对应位置设计四杆机构的作图法。
3.2 重点与难点分析本章的重点是平面四杆机构的基本特性以及平面四杆机构的设计; 难点是用作图法设计四杆机构。
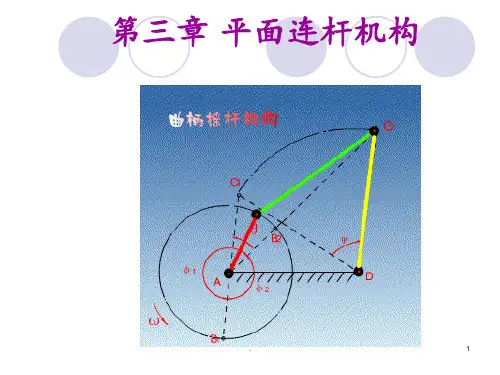
1. 极位夹角θ:机构从动件摇杆处于两极限位置时 , 原动件曲柄在相应两位置所夹的锐角。
如果θ≠ 0, 表示机构有急回特性 , 且θ角愈大 ,机构的急回运动就愈显著。
所以要判断一个机构是否有急回特性就要找出极位夹角。
例如 , 一个对心曲柄滑块机构, 因其极位夹角θ=0, 机构就没有急回特性 , 但一个偏置曲柄滑块机构, 因其极位夹角θ≠ 0,机构就有急回特性 ; 摆动导杆机构的摆角与其极位夹角相等, 它有急回特性 , 但转动导杆机构就没有急回特性。
2. 压力角α与传动角γ:在四杆机构中, 当不计摩擦时 , 主动件通过连杆作用在从动件上的力的作用线与其作用点的速度方向之间所夹的锐角, 称为机构在此位置的压力角。
而把压力角的余角γ, 即连杆与从动摇杆所夹的锐角, 称为传动角。
它们常用来衡量机构的传动性能,传动角γ愈大 , 即压力角愈小 ,机构的传动性能愈好 , 效率愈高。
多数机构运动中的传动角是变化的, 为了使机构传动质量良好 , 一般规定机构的最小传动角γmin ≥ 40°。
为了检查机构的最小传动角, 需要确定最小传动角的位置。
通过分析可知 :曲柄摇杆机构的最小传动角出现在曲柄与机架共线的两位置之一 ; 曲柄滑块机构的最小传动角出现在曲柄与导路垂直的位置,导杆机构在任何位置的最小传动角都等于 90°。

平面机构的自由度和速度分析一、复习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?2、平面机构中的低副和高副各引入几个约束?3、机构自由度数和原动件数之间具有什么关系?4、用机构运动简图表示你家中的缝纫机的踏板机构。
5、计算平面机构自由度时,应注意什么问题?二、填空题1、运动副是指能使两构件之间既保持接触。
而又能产生一定形式相对运动的。
2、由于组成运动副中两构件之间的形式不同,运动副分为高副和低副。
3、运动副的两构件之间,接触形式有接触,接触和接触三种。
4、两构件之间作接触的运动副,叫低副。
5、两构件之间作或接触的运动副,叫高副。
6、回转副的两构件之间,在接触处只允许孔的轴心线作相对转动。
7、移动副的两构件之间,在接触处只允许按方向作相对移动。
8、带动其他构件的构件,叫原动件。
9、在原动件的带动下,作运动的构件,叫从动件。
10、低副的优点:制造和维修,单位面积压力,承载能力。
11、低副的缺点:由于是摩擦,摩擦损失比大,效率。
12、暖水瓶螺旋瓶盖的旋紧或旋开,是低副中的副在接触处的复合运动。
13、房门的开关运动,是副在接触处所允许的相对转动。
14、抽屉的拉出或推进运动,是副在接触处所允许的相对移动。
15、火车车轮在铁轨上的滚动,属于副。
三、判断题1、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()2、凡两构件直接接触,而又相互联接的都叫运动副。
()3、运动副是联接,联接也是运动副。
()4、运动副的作用,是用来限制或约束构件的自由运动的。
()5、螺栓联接是螺旋副。
()6、两构件通过内表面和外表面直接接触而组成的低副,都是回转副。
()7、组成移动副的两构件之间的接触形式,只有平面接触。
()8、两构件通过内,外表面接触,可以组成回转副,也可以组成移动副。
()9、运动副中,两构件联接形式有点、线和面三种。
()10、由于两构件间的联接形式不同,运动副分为低副和高副。