opencv函数目录-Cv图像处理
- 格式:docx
- 大小:14.00 KB
- 文档页数:2
opencv blur函数函数名:blur函数描述:blur函数是OpenCV中的一种图像平滑处理函数,用于对图像进行模糊处理。
模糊操作可以减轻图像中的噪声,并减少图像的细节。
函数原型:void blur(InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT )参数解释:- src: 输入图像矩阵,可以是8位无符号整型(CV_8U),16位有符号整型(CV_16S),32位有符号浮点型(CV_32F)或者64位浮点型(CV_64F)。
- dst: 输出图像矩阵,与源图像矩阵有相同的尺寸和类型。
- ksize: 卷积核的尺寸,通常为奇数,例如(3, 3)、(5, 5)等。
- anchor: 锚点位置,用于指定卷积核的中心点,默认值为(-1, -1),表示锚点位于卷积核的中心。
- borderType: 边界像素插值方法,用于处理超出边界的像素,默认值为BORDER_DEFAULT。
函数功能:blur函数利用指定的卷积核对图像进行模糊处理。
卷积核的尺寸取决于ksize参数的值,边界像素的插值方法由borderType参数指定。
模糊操作会对图像中的每个像素点进行卷积运算,计算结果作为该像素点的输出值。
图像的模糊程度取决于卷积核的大小和插值方法。
示例代码:以下示例代码展示了如何使用blur函数对图像进行模糊处理:```cpp#include <opencv2/opencv.hpp>#include <iostream>using namespace cv;using namespace std;int main(){Mat srcImage = imread("lena.jpg", IMREAD_COLOR);if (srcImage.empty()){cout << "Failed to read image" << endl;return -1;}Mat blurredImage;Size ksize(5, 5);blur(srcImage, blurredImage, ksize);namedWindow("Original Image", WINDOW_AUTOSIZE);namedWindow("Blurred Image", WINDOW_AUTOSIZE);imshow("Original Image", srcImage);imshow("Blurred Image", blurredImage);waitKey(0);return 0;}```上述代码中,先读取名为"lena.jpg"的图像文件,然后调用blur 函数对图像进行模糊处理,将处理结果存储在名为blurredImage的Mat对象中。
opencv4函数手册
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法。
它支
持多种编程语言,包括C++、Python等,并且可以在多个操作系统
上运行。
关于OpenCV 4的函数手册,它包含了OpenCV库中各个函数的
详细说明和用法。
这些函数涵盖了图像处理、特征提取、物体识别、摄像机标定、图像变换等多个领域。
在OpenCV 4函数手册中,你可以找到以下内容:
1. 函数概述,对OpenCV库中的各个函数进行分类和概述,方
便用户快速了解函数的用途和功能。
2. 函数参数,详细说明每个函数的参数列表,包括输入参数、
输出参数和可选参数。
这些参数描述了函数的输入和输出数据类型、大小、格式等信息。
3. 函数返回值,说明函数的返回值类型和含义,帮助用户理解
函数的执行结果。
4. 函数示例,提供函数的使用示例代码,展示如何调用函数以及函数的具体用法。
示例代码通常包含了图像加载、处理、保存等步骤,帮助用户更好地理解函数的实际应用。
5. 相关函数,介绍与当前函数相关的其他函数,帮助用户了解函数之间的关联和依赖关系。
6. 注意事项,列出函数的一些注意事项和限制,帮助用户正确使用函数并避免常见错误。
通过OpenCV 4函数手册,你可以学习和了解OpenCV库中各个函数的功能和用法,从而在图像处理和计算机视觉任务中更加高效地使用OpenCV。
你可以通过OpenCV官方网站或者在线文档获取OpenCV 4函数手册的详细内容。
cvimshow用法cvimshow函数是OpenCV库中的一个函数,用于显示图像。
它的用法非常简单直观。
在使用cvimshow函数之前,我们需要先导入OpenCV库并读取图像。
例如,以下代码展示了如何读取并显示一张图片:```import cv2# 读取图像img = cv2.imread("image.jpg")# 显示图像cv2.imshow("Image", img)cv2.waitKey(0)cv2.destroyAllWindows()```在上述代码中,首先使用cv2.imread函数读取名为"image.jpg"的图像,并将其赋值给变量img。
然后,使用cv2.imshow函数显示图像。
其中,"Image"是窗口的名称,可以根据需要自行指定。
cv2.imshow函数的第一个参数是窗口名称,第二个参数是要显示的图像。
接下来,使用cv2.waitKey(0)等待用户按下任意键后关闭窗口。
最后,使用cv2.destroyAllWindows函数关闭所有打开的窗口。
除了显示图像,cvimshow函数还可以显示视频。
例如,以下代码演示了如何使用cvimshow函数从摄像头实时显示视频:```import cv2# 打开摄像头cap = cv2.VideoCapture(0)while True:# 读取视频帧ret, frame = cap.read()# 显示视频帧cv2.imshow("Video", frame)# 按下'q'键退出循环if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头并关闭窗口cap.release()cv2.destroyAllWindows()```在上述代码中,首先使用cv2.VideoCapture函数打开摄像头,将其赋值给变量cap。
python cv2 用法cv2是OpenCV(Open Source Computer Vision Library)库的Python 接口,提供了丰富的图像处理和计算机视觉功能。
以下是一些常见的cv2模块的用法示例:1.导入OpenCV 库:import cv22.读取图像文件:image = cv2.imread('image.jpg')3.显示图像:cv2.imshow('Image', image) cv2.waitKey(0) cv2.destroyAllWindows()4.保存图像:cv2.imwrite('output_image.jpg', image)5.灰度化处理:gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)6.图像平滑处理(使用高斯滤波):blurred_image = cv2.GaussianBlur(image, (5, 5), 0)7.边缘检测(使用Canny算子):edges = cv2.Canny(gray_image, 50, 150)8.轮廓检测:contours, hierarchy = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)9.绘制轮廓:cv2.drawContours(image, contours, -1, (0, 255, 0), 2)10.图像缩放:resized_image = cv2.resize(image, (new_width, new_height))11.图像旋转:rows, cols = image.shape[:2]M = cv2.getRotationMatrix2D((cols / 2, rows / 2), angle, scale)rotated_image = cv2.warpAffine(image, M, (cols, rows))12.图像阈值处理:ret, thresholded_image = cv2.threshold(gray_image, 127, 255,cv2.THRESH_BINARY)以上只是cv2库中一些常见功能的简单用法示例。
基于OpenCV的图像处理Image Processing Based On OpenCV摘要:OpenCV是近年来最受欢迎的计算机视觉应用库。
在其基础上编写图像处理代码效率得到有效提高。
本文旨在对OpenCV进行一个快速全面简介,通过介绍其数据结构、HighGUI库,图像处理函数使读者能快速形成对OpenCV印象。
文章详细介绍了2.4.4版本在VS2010中的安装测试说明。
读者能够在此基础上架构自己代码。
文章最后通过自适应阈值分割实例来介绍OpenCV的具体应用。
关键词:OpenCV VS2010 图像处理KeyWords: OpenCV VS2010 image processingAbstract: OpenCV is one of the most popular computer vision library in recent years. Prepared on the basis of its image processing code efficiency improved effectively. This paper aims to OpenCV for a rapid and comprehensive introduction, through the presentation of its data structures, HighGUI libraries, image processing functions so that readers can quickly form on the OpenCV impression. Finally, version 2.4.4 introduced in detail the installation in VS2010 test instructions. On this basis, the reader can structure their own code. Finally, the paper uses adaptive thresholding examples to introduce specific application of OpenCV.OpenCV诞生于Inter研究中心,采用C/C++编写,包含覆盖计算机视觉众多应用领域的五百多个函数。
cv2 用法一、概述cv2 是 OpenCV(开源计算机视觉库)的一个子模块,提供了许多功能强大的计算机视觉和图像处理功能。
其中,cv2 提供了一系列高级的计算机视觉功能,如特征检测、图像分割、目标跟踪等。
这些功能可以帮助开发者快速实现各种图像处理和计算机视觉应用。
二、基本用法在使用 cv2 之前,需要先安装 OpenCV 库。
可以通过 pip 命令进行安装:```shellpip install opencv-python```安装完成后,就可以开始使用 cv2 了。
以下是一些基本用法示例:1. 读取图像使用 cv2.imread() 函数可以读取图像文件,返回一个 Mat 对象,可以对其进行各种操作。
例如:```pythonimport cv2img = cv2.imread('image.jpg')```2. 显示图像使用 cv2.imshow() 函数可以显示图像。
可以通过回调函数来控制图像的显示时间和显示内容。
例如:```pythoncv2.imshow('image', img)cv2.waitKey(0) # 等待用户按下任意键关闭窗口```3. 二值化处理使用 cv2.threshold() 函数可以对图像进行二值化处理,将图像转换为黑白效果。
例如:```pythonret, thresh = cv2.threshold(img, 127, 255,cv2.THRESH_BINARY)```三、高级用法除了基本用法外,cv2 还提供了许多高级功能,如特征检测、图像分割、目标跟踪等。
以下是一些高级用法示例:1. 特征检测(HOG)使用 cv2.HOGDescriptor() 可以对图像进行特征检测,用于物体检测和分类等任务。
例如:```pythonwinsize = (64,64) # 窗口大小blockSize = (10,10) # 块大小blockStride = (8,8) # 块移动步长cellSize = (8,8) # 单元格大小numBins = 9 # 直方图的bins数量hog =cv2.HOGDescriptor(winsize,blockSize,blockStride,cellSize,numB ins)feature = pute(img) # 对图像进行特征检测```2. 图像分割(GrabCut)使用 cv2.grabCut() 可以对图像进行分割,用于背景提取和物体分割等任务。
opencv库常⽤函数常⽤opencv函数:1、cv2.line():画线——参数依次为:图⽚路径,起点和终点坐标值,颜⾊(rgb),线条宽度(像素)2、dst = cvtColor(src,code,dst=None,dstCn=None):颜⾊空间转换函数——参数依次为(原图像,color转化代码,输出图像,输出通道), 返回转换后的图像3、ret, dst = cv2.threshold(src, thresh, maxval, type):固定阈值⼆值化——src:输⼊图,只能输⼊单通道图像,通常来说为灰度图dst:输出图thresh:阈值maxval:当像素值超过了阈值(或者⼩于阈值,根据type来决定),所赋予的值type:⼆值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV4、cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]]) :查找检测物体的轮廓opencv2返回两个值:contours:hierarchy。
注:opencv3会返回三个值,分别是img, countours, hierarchy参数:第⼀个参数是寻找轮廓的图像;第⼆个参数表⽰轮廓的检索模式,有四种(本⽂介绍的都是新的cv2接⼝):cv2.RETR_EXTERNAL 表⽰只检测外轮廓cv2.RETR_LIST 检测的轮廓不建⽴等级关系cv2.RETR_CCOMP 建⽴两个等级的轮廓,上⾯的⼀层为外边界,⾥⾯的⼀层为内孔的边界信息。
如果内孔内还有⼀个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE 建⽴⼀个等级树结构的轮廓。
第三个参数method为轮廓的近似办法cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1cv2.CHAIN_APPROX_SIMPLE 压缩⽔平⽅向,垂直⽅向,对⾓线⽅向的元素,只保留该⽅向的终点坐标,例如⼀个矩形轮廓只需4个点来保存轮廓信息cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS 使⽤teh-Chinl chain 近似算法返回值cv2.findContours()函数返回两个值,⼀个是轮廓本⾝,还有⼀个是每条轮廓对应的属性。
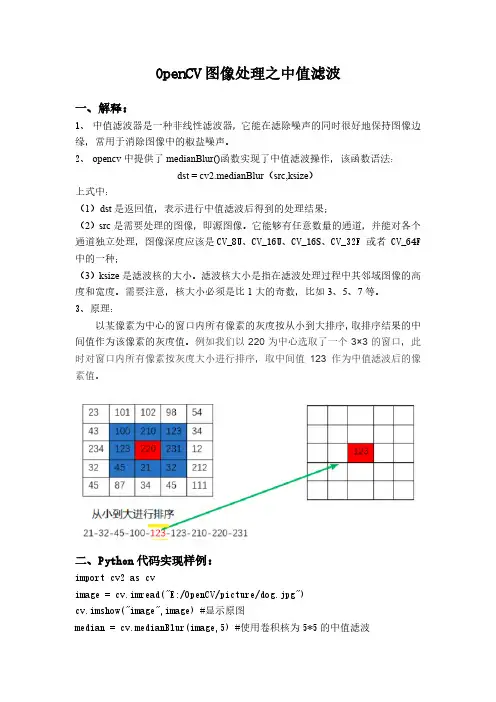
OpenCV图像处理之中值滤波一、解释:1、中值滤波器是一种非线性滤波器,它能在滤除噪声的同时很好地保持图像边缘,常用于消除图像中的椒盐噪声。
2、opencv中提供了medianBlur()函数实现了中值滤波操作,该函数语法:dst = cv2.medianBlur(src,ksize)上式中:(1)dst是返回值,表示进行中值滤波后得到的处理结果;(2)src是需要处理的图像,即源图像。
它能够有任意数量的通道,并能对各个通道独立处理,图像深度应该是CV_8U、CV_16U、CV_16S、CV_32F 或者 CV_64F 中的一种;(3)ksize是滤波核的大小。
滤波核大小是指在滤波处理过程中其邻域图像的高度和宽度。
需要注意,核大小必须是比1大的奇数,比如3、5、7等。
3、原理:以某像素为中心的窗口内所有像素的灰度按从小到大排序,取排序结果的中间值作为该像素的灰度值。
例如我们以220为中心选取了一个3×3的窗口,此时对窗口内所有像素按灰度大小进行排序,取中间值123作为中值滤波后的像素值。
二、Python代码实现样例:import cv2 as cvimage = cv.imread("E:/OpenCV/picture/dog.jpg")cv.imshow("image",image) #显示原图median = cv.medianBlur(image,5) #使用卷积核为5*5的中值滤波cv.imshow("midian",median) #显示滤波结果cv.waitKey()cv.destroyAllWindows()三、图像处理结果前后对比:。
python cv2使用方法使用Python和OpenCV库可以轻松地进行图像处理和计算机视觉任务。
OpenCV是一个开源计算机视觉库,它提供了许多用于图像处理和计算机视觉的函数和算法。
在本文中,我们将介绍如何使用Python和OpenCV库进行图像处理。
安装OpenCV库在使用OpenCV库之前,需要先安装它。
可以使用pip命令来安装OpenCV库。
在命令行中输入以下命令:pip install opencv-python这将安装OpenCV库及其依赖项。
读取图像在使用OpenCV库进行图像处理之前,需要先读取图像。
可以使用cv2.imread()函数来读取图像。
该函数接受图像文件的路径作为参数,并返回一个NumPy数组,该数组包含图像的像素值。
以下是读取图像的示例代码:import cv2# 读取图像img = cv2.imread('image.jpg')# 显示图像cv2.imshow('image', img)cv2.waitKey(0)cv2.destroyAllWindows()在上面的代码中,我们使用cv2.imread()函数读取名为“image.jpg”的图像,并使用cv2.imshow()函数显示图像。
cv2.waitKey()函数等待用户按下任意键,然后使用cv2.destroyAllWindows()函数关闭所有窗口。
调整图像大小在某些情况下,需要调整图像的大小。
可以使用cv2.resize()函数来调整图像的大小。
该函数接受原始图像、目标图像大小和插值方法作为参数,并返回调整大小后的图像。
以下是调整图像大小的示例代码:import cv2# 读取图像img = cv2.imread('image.jpg')# 调整图像大小resized_img = cv2.resize(img, (500, 500),interpolation=cv2.INTER_AREA)# 显示图像cv2.imshow('image', resized_img)cv2.waitKey(0)cv2.destroyAllWindows()在上面的代码中,我们使用cv2.resize()函数将图像大小调整为500x500,并使用cv2.imshow()函数显示调整大小后的图像。
OpenCV中的mean函数定义cv2.mean()是OpenCV库中的一个函数,用于计算数组或图像的均值。
mean(src[, mask]) -> retval•src:输入数组或图像。
•mask:可选参数,指定要计算均值的区域。
它必须具有与src相同的尺寸,并且为8位单通道图像(可以是二进制掩码)。
如果没有提供mask,则将对整个src进行计算。
•retval:返回一个包含通道均值的浮点数数组。
用途mean函数主要用于计算图像或数组的均值。
在图像处理和计算机视觉领域中,均值是一种常见的统计量,它可以提供关于数据集中心位置的信息。
通过计算均值,我们可以了解数据集中所有像素或元素的平均值,从而获得更好的理解和分析数据集。
在实际应用中,mean函数常用于以下几个方面:1. 图像处理在图像处理过程中,我们经常需要对图像进行平滑处理、降噪等操作。
mean函数可以帮助我们快速计算出图像各个区域(全局或局部)的均值,并根据这些均值来调整图像亮度、对比度等属性。
例如,在直方图均衡化算法中,我们需要计算图像的均值来进行亮度调整。
2. 图像分割图像分割是将图像划分为具有不同属性或特征的区域的过程。
mean函数可以用于计算图像区域的均值,从而帮助我们识别和分割出具有相似颜色或纹理特征的区域。
例如,在基于阈值的图像分割中,我们可以通过计算每个区域的均值来确定合适的阈值。
3. 特征提取在计算机视觉任务中,特征提取是一项重要任务。
mean函数可以用于计算图像或数组中某个区域的均值,并作为一个特征进行后续处理。
例如,在人脸识别任务中,我们可以计算人脸图像某个区域(如眼睛、鼻子等)的均值作为一个特征向量。
4. 数组操作除了处理图像外,mean函数还可以用于对数组进行统计操作。
例如,在数字信号处理中,我们可以使用mean函数来计算音频信号或时间序列数据的均值。
工作方式mean函数根据输入参数src和mask来计算均值。
OpenCV常⽤库函数⼀、core模块1、Mat - 基本图像容器Mat 是⼀个类,由两个数据部分组成:矩阵头(包含矩阵尺⼨,存储⽅法,存储地址等信息)和⼀个指向存储所有像素值的矩阵(根据所选存储⽅法的不同矩阵可以是不同的维数)的指针。
创建Mat对象⽅法:11->Mat() 构造函数:2 Mat M(2,2, CV_8UC3, Scalar(0,0,255));3int sz[3] = {2,2,2};4 Mat L(3,sz, CV_8UC(1), Scalar::all(0));52->Create() function: 函数6 M.create(4,4, CV_8UC(2));73-> 初始化zeros(), ones(), :eyes()矩阵8 Mat E = Mat::eye(4, 4, CV_64F);9 Mat O = Mat::ones(2, 2, CV_32F);10 Mat Z = Mat::zeros(3,3, CV_8UC1);114->⽤逗号分隔的初始化函数:12 Mat C = (Mat_<double>(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);常⽤操作:1 Mat A, C; // 只创建信息头部分2 A = imread(argv[1], CV_LOAD_IMAGE_COLOR); // 这⾥为矩阵开辟内存3 Mat B(A); // 使⽤拷贝构造函数4 C = A; // 赋值运算符5 Mat D (A, Rect(10, 10, 100, 100) ); // using a rectangle6 Mat E = A(Range:all(), Range(1,3)); // using row and column boundaries7 Mat F = A.clone();8 Mat G;9 A.copyTo(G); //使⽤函数 clone() 或者 copyTo() 来拷贝⼀副图像的矩阵。
opencv 基本仿射变换函数OpenCV是一个功能强大的开源计算机视觉库,可以使用该库在各种平台上构建基于计算机视觉的项目。
其中,仿射变换是OpenCV中的一项重要功能,可以被用于图像处理、计算机视觉等领域。
本篇文章将介绍基本的仿射变换函数及其原理。
仿射变换是一种线性变换,通过对原图像进行平移、旋转、缩放、错切等操作的组合,达到改变图像形状和位置的目的。
仿射变换可以被表示为一个二维矩阵,该矩阵包含多个变换参数,如平移量、旋转角度、缩放因子和错切参数。
OpenCV中的仿射变换函数主要有三个:cv2.getAffineTransform()、cv2.warpAffine()和cv2.transform()。
这些函数在分别实现的功能方面略有不同,下文将逐一介绍。
1. cv2.getAffineTransform(src, dst)该函数用于获得一个仿射变换矩阵,该矩阵可以被用于对图像进行仿射变换操作。
参数说明:src:一个包含三个点坐标的数组,表示原图像中的三个点。
这些点需要表示为三个二维坐标元组(x,y)。
dst:一个包含三个点坐标的数组,表示变换后的图像中对应的三个点,格式与src相同。
返回值:一个2*3的仿射变换矩阵,可以被用于cv2.warpAffine()函数中。
示例:import cv2import numpy as npimport matplotlib.pyplot as pltimg = cv2.imread('lenna.jpg')rows, cols, ch = img.shape#定义原图中的三个点src_points = np.float32([[0, 0], [cols - 1, 0], [0, rows - 1]])#定义变换后的图像中的三个对应点dst_points = np.float32([[cols * 0.1, rows * 0.1], [cols * 0.9, rows * 0.2], [cols * 0.3, rows * 0.9]])#获得仿射变换矩阵M = cv2.getAffineTransform(src_points, dst_points)#对图像进行仿射变换dst = cv2.warpAffine(img, M, (cols, rows))#显示结果plt.subplot(121), plt.imshow(img), plt.title('Input')plt.subplot(122), plt.imshow(dst), plt.title('Output') plt.show()此处,我们先读入一张图片,并定义两组点作为src_points和dst_points参数,这两个参数将作为cv2.getAffineTransform()的输入。
前端像识别实践利用OpenCV进行像处理与分析的教程前端图像识别实践:利用OpenCV进行图像处理与分析的教程导言:图像识别与处理是现代计算机科学领域的一个重要研究方向,它通过对图像进行人工智能算法的应用从而实现对图像的分析、识别与处理。
而在前端开发中,借助开源图像处理库OpenCV,我们能够实现丰富的图像处理与分析效果。
本教程将介绍如何在前端开发中使用OpenCV进行图像识别实践,并提供一些实用的处理示例。
一、OpenCV简介OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它提供了丰富的图像处理函数和算法,支持多种编程语言,包括C++、Python等。
OpenCV广泛应用于计算机视觉、图像识别和机器学习等领域,在前端开发中,我们可以利用OpenCV实现图像的处理、特征分析等功能。
二、环境搭建在开始前端图像识别的实践之前,我们需要先搭建好相应的开发环境。
首先,确保你的计算机已经安装好了OpenCV的相关库文件,并配置好了编译环境。
接下来,我们将使用HTML5的Canvas元素来实现图像的显示与处理,因此,你需要了解基本的HTML5技术和Canvas的使用方法。
此外,为了方便操作图像,我们还需要使用JavaScript编程语言。
三、图像处理基础在进行图像识别实践之前,我们有必要了解一些基本的图像处理概念和算法。
例如,图像的读取与显示、图像的灰度化、图像的二值化以及滤波处理等。
这些基本的概念和算法是我们进行后续图像处理与分析的基础。
四、图像识别实践1. 图像的读取与显示- 在前端开发中,我们使用<input type="file">标签来实现图像的上传功能,通过File API可以获取到用户上传的图像文件。
接下来,我们使用Canvas元素将图像显示在页面上,代码示例如下:```javascriptvar input = document.querySelector('input[type="file"]');var canvas = document.querySelector('canvas');var ctx = canvas.getContext('2d');input.addEventListener('change', function(e) {var file = e.target.files[0];var reader = new FileReader();reader.onload = function(event) {var img = new Image();img.onload = function() {ctx.drawImage(img, 0, 0, canvas.width, canvas.height);}img.src = event.target.result;}reader.readAsDataURL(file);});```2. 图像的灰度化- 图像灰度化是将彩色图像转换为灰度图像的过程。
cvgetreal2d函数使用方法【实用版4篇】篇1 目录1.cvgetreal2d 函数简介2.cvgetreal2d 函数参数3.cvgetreal2d 函数用法示例4.cvgetreal2d 函数的注意事项篇1正文【1.cvgetreal2d 函数简介】cvgetreal2d 函数是 OpenCV 库中的一个函数,用于获取图像的二维真实坐标。
该函数可以用于将图像的像素坐标转换为实际世界中的坐标,这对于进行图像处理和计算机视觉应用非常有用。
【2.cvgetreal2d 函数参数】cvgetreal2d 函数的参数包括:- src:输入图像,即需要进行坐标转换的图像。
- row:图像的行索引,即需要转换的像素所在的行。
- col:图像的列索引,即需要转换的像素所在的列。
- camera_matrix:摄像机矩阵,描述摄像机内部参数。
- camera_dist_coeffs:摄像机距离系数,描述摄像机到图像平面的距离。
- image_size:图像大小,包括图像的宽度和高度。
- scale_factor:缩放因子,用于调整图像大小。
【3.cvgetreal2d 函数用法示例】以下是一个使用 cvgetreal2d 函数的示例:```pythonimport cv2import numpy as np# 创建一个图像img = np.zeros((300, 300, 3), dtype=np.uint8)# 初始化摄像机矩阵和距离系数camera_matrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]]) camera_dist_coeffs = np.array([k1, k2, p1, p2, k3])# 设置图像大小image_size = (300, 300)# 设置缩放因子scale_factor = 1.0# 定义行和列索引row = 100col = 100# 获取二维真实坐标real_row, real_col = cv2.cvgetReal2D(img, row, col,camera_matrix, camera_dist_coeffs, image_size, scale_factor) print("真实坐标:", real_row, real_col)```【4.cvgetreal2d 函数的注意事项】在使用 cvgetreal2d 函数时,需要注意以下几点:- 输入图像必须是 8 位或浮点数的单通道图像。
OpenCV图像处理之均值滤波一、均值滤波均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即包括目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
均值率波的步骤如下所示,首先计算已10为中心的周围8各像素点进行求和;然后计算平均值,即均值;最后,将计算得到的均值填入中心位置,即完成了均值滤波过程。
基于python的均值滤波函数为dst = cv.blur(src,ksize)。
函数中,dst为均值滤波后输出的图像;src为待均值滤波的输入图像;ksize:卷积核的大小,决定滤波模板的大小范围。
二、Python代码实现样例:import cv2 as cvimage = cv.imread("E:/OpenCV/picture/cat.jpg")cv.imshow("image",image) #显示原图means5 = cv.blur(image,(5,5)) #定义卷积为5*5,实现均值滤波means10 = cv.blur(image,(10,10)) #定义卷积为10*10,实现均值滤波means20 = cv.blur(image,(20,20)) #定义卷积为20*20,实现均值滤波cv.imshow("means5",means5)cv.imshow("means10",means10)cv.imshow("means20",means20) cv.waitKey()cv.destroyAllWindows()三、图像处理结果前后对比:。