opencv最基础的图像处理
- 格式:doc
- 大小:32.00 KB
- 文档页数:10
OpenCV图像处理技术介绍一、概述OpenCV(Open Source Computer Vision Library)是一款用于计算机视觉和机器视觉的开源跨平台库。
它被广泛应用于计算机视觉、图像处理、机器学习、人工智能等领域,是一种非常强大、开放的框架。
本文将重点介绍 OpenCV 图像处理技术,以帮助读者了解它的具体应用和实现过程。
二、图像的读取和展示要使用 OpenCV 进行图像处理,需要先加载图像。
OpenCV 支持多种图像格式,如 BMP、JPEG、PNG、GIF 等。
用OpenCV 加载图像的方法有两种:一种是cv::imread() 函数,另一种是 cv::VideoCapture 类。
cv::imread() 函数可以通过指定图像路径或网络 URL 加载本地或远程图像,读取后返回一个 cv::Mat 对象,然后可以使用cv::imshow() 函数将图像展示在屏幕上。
三、灰度化和二值化灰度化将一个彩色图像转换为黑白图像,使得图像的像素值只有一个亮度值,而没有颜色信息。
在 OpenCV 中,可以通过cv::cvtColor() 函数将一张彩色图像转换为灰度图像。
二值化是将灰度图像中的像素值转换为 0 或 255,即黑色或白色。
它主要用于将图像转换为二进制图像,方便进一步处理。
在OpenCV 中,可以使用 cv::threshold() 函数实现图像的二值化,可以设置操作的阈值、最大值和操作类型等参数。
四、图像滤波图像滤波是指对图像进行平滑或增强的处理方法。
在 OpenCV 中,可以使用 cv::GaussianBlur() 函数实现图像的高斯滤波,可以设置卷积核的大小和标准差等参数,以及边缘处理的方法。
此外,还可以使用 cv::medianBlur() 函数进行中值滤波,cv::bilateralFilter() 函数进行双边滤波,以及 cv::blur() 函数进行均值滤波等。

C++的OpenCV使用方法总结在计算机视觉和图像处理领域,OpenCV是一个非常强大的开源库,它提供了丰富的功能和工具,用于处理图像和视频。
作为C++程序员,了解并熟练使用OpenCV库是非常重要的。
本文将对C++中使用OpenCV的方法进行总结,并探讨一些常见的应用和技巧。
一、安装和配置OpenCV在开始使用OpenCV之前,首先需要安装和配置这个库。
在Windows评台上,可以通过下载预编译的二进制文件进行安装;在Linux评台上,可以通过包管理器进行安装。
安装完毕后,还需进行一些环境配置,确保编译器能够正确信息OpenCV库文件。
二、基本图像处理1. 读取和显示图像在C++中使用OpenCV读取和显示图像非常简单,只需几行代码即可完成。
首先需要使用imread函数读取图像文件,然后使用imshow 函数显示图像。
在进行图像显示后,需要使用waitKey函数等待用户按下某个键,以便关闭显示窗口。
2. 图像的基本操作OpenCV提供了丰富的图像处理函数,包括图像缩放、旋转、平移、通道拆分与合并等。
这些函数可以帮助我们对图像进行各种基本操作,从而满足不同的需求。
三、特征提取与描述1. Harris角点检测Harris角点检测是一种经典的特征点检测方法,它可以用来识别图像中的角点。
在OpenCV中,我们可以使用cornerHarris函数来实现Harris角点检测,然后对检测结果进行筛选和标记。
2. SIFT特征提取SIFT是一种广泛应用的特征提取算法,它具有旋转不变性和尺度不变性。
在OpenCV中,我们可以使用SIFT算法来提取图像的关键点和特征描述子,从而实现图像匹配和目标识别等功能。
四、图像分类与识别1. 使用支持向量机(SVM)进行图像分类OpenCV提供了对机器学习算法的支持,包括SVM分类器。
我们可以使用SVM对图像进行分类,从而实现图像识别和目标检测等功能。
2. 使用深度学习模型进行图像识别近年来,深度学习在图像识别领域取得了显著的成就。
1 opencv中的几种常见的图像类型opencv中,几种常见的图像类型有:IplImage,Mat,CvMat,CvArrCvArr :老版本的结构了。
是一个抽象基类,在函数原型中,常见到CvArr(CvArr*),这就允许吧CvMar* 或者IplImage* 传递到程序或函数参数中了。
CvMat :矩阵结构,IplImage :是较老版本的一种类型了,对图像进行”编码“的基本结构。
这些图像可能是灰度,彩色,4通道的(RGB+ alpha),其中,每个通道可以包含任意的整数或浮点数。
Mat:新版本中的强大的一个图像容器,是和Matlab中的函数对应的。
基本上讲 Mat 是一个类,由两个数据部分组成:矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和一个指向存储所有像素值的矩阵(根据所选存储方法的不同矩阵可以是不同的维数)的指针。
矩阵头的尺寸是常数值,但矩阵本身的尺寸会依图像的不同而不同,通常比矩阵头的尺寸大数个数量级。
2 opencv中存储图像类型转换(1)将IplImage类型转换到Mat类型Mat::Mat(const IplImage* img, bool copyData=false);默认情况下,新的Mat类型与原来的IplImage类型共享图像数据,转换只是创建一个Mat矩阵头。
当将参数copyData设为true后,就会复制整个图像数据。
例:IplImage*iplImg = cvLoadImage("greatwave.jpg", 1);Matmtx(iplImg); // IplImage* ->Mat 共享数据// or : Mat mtx = iplImg;(2)将Mat类型转换到IplImage类型同样只是创建图像头,而没有复制数据。
例:IplImage ipl_img = img; // Mat -> IplImage(3)将CvMat类型转换为Mat类型与IplImage的转换类似,可以选择是否复制数据。
cvmat 引用计数-概述说明以及解释1.引言1.1 概述概述部分:OpenCV中的cv::Mat是一个重要的数据结构,用于存储图像数据。
在处理图像数据时,通常需要对图像进行复制、裁剪、缩放等操作,这可能会导致内存的频繁分配和释放,影响程序的性能。
为了解决这个问题,OpenCV引入了引用计数机制,即对cv::Mat的引用计数进行管理,避免不必要的内存操作,提高程序效率。
本文将介绍cv::Mat的引用计数概念,讨论引用计数的作用以及在实际应用中的优势。
着重强调了cv::Mat引用计数在图像处理中的重要性,希望读者能够深入了解并应用这一功能,提升图像处理的效率和质量。
1.2 文章结构本文主要分为引言、正文和结论三部分。
首先,引言部分将概述文章的主题,并介绍文章的结构和目的。
接着,正文部分将详细讨论cv::Mat 的概念、引用计数的概念以及cv::Mat引用计数的作用。
最后,结论部分将总结cv::Mat引用计数的重要性,并探讨应用cv::Mat引用计数的优势和未来发展的展望。
整个文章将围绕着cv::Mat引用计数展开讨论,旨在帮助读者更深入地了解这一概念的重要性和应用领域。
1.3 目的:本文的主要目的是探讨cv::Mat引用计数的概念和作用。
通过深入了解cv::Mat引用计数的机制,我们可以更好地理解在OpenCV中对图像数据进行操作时的内存管理方式。
此外,我们还将分析cv::Mat引用计数在图像处理和机器学习领域中的应用优势,探讨其对算法性能和效率的影响。
最终,我们将展望cv::Mat引用计数在未来发展中的潜力,以及可能带来的创新和改进。
通过本文的讨论,读者可以更全面地了解和应用cv::Mat 引用计数,从而提高图像处理和机器学习任务的效率和效果。
2.正文2.1 什么是cv::Mat在OpenCV中,cv::Mat是表示图像的基本数据结构。
它是一个N维矩阵类,用于存储图像像素的数据以及相关的元数据。
基于OpenCV的图像处理Image Processing Based On OpenCV摘要:OpenCV是近年来最受欢迎的计算机视觉应用库。
在其基础上编写图像处理代码效率得到有效提高。
本文旨在对OpenCV进行一个快速全面简介,通过介绍其数据结构、HighGUI库,图像处理函数使读者能快速形成对OpenCV印象。
文章详细介绍了2.4.4版本在VS2010中的安装测试说明。
读者能够在此基础上架构自己代码。
文章最后通过自适应阈值分割实例来介绍OpenCV的具体应用。
关键词:OpenCV VS2010 图像处理KeyWords: OpenCV VS2010 image processingAbstract: OpenCV is one of the most popular computer vision library in recent years. Prepared on the basis of its image processing code efficiency improved effectively. This paper aims to OpenCV for a rapid and comprehensive introduction, through the presentation of its data structures, HighGUI libraries, image processing functions so that readers can quickly form on the OpenCV impression. Finally, version 2.4.4 introduced in detail the installation in VS2010 test instructions. On this basis, the reader can structure their own code. Finally, the paper uses adaptive thresholding examples to introduce specific application of OpenCV.OpenCV诞生于Inter研究中心,采用C/C++编写,包含覆盖计算机视觉众多应用领域的五百多个函数。
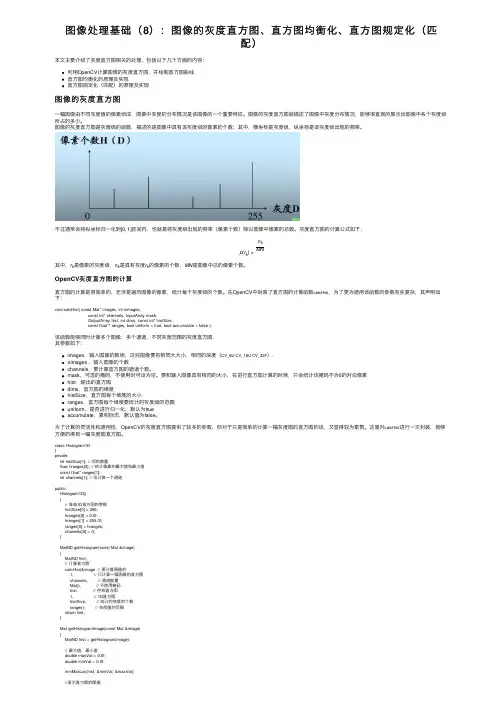
图像处理基础(8):图像的灰度直⽅图、直⽅图均衡化、直⽅图规定化(匹配)本⽂主要介绍了灰度直⽅图相关的处理,包括以下⼏个⽅⾯的内容:利⽤OpenCV 计算图像的灰度直⽅图,并绘制直⽅图曲线直⽅图均衡化的原理及实现直⽅图规定化(匹配)的原理及实现图像的灰度直⽅图⼀幅图像由不同灰度值的像素组成,图像中灰度的分布情况是该图像的⼀个重要特征。
图像的灰度直⽅图就描述了图像中灰度分布情况,能够很直观的展⽰出图像中各个灰度级所占的多少。
图像的灰度直⽅图是灰度级的函数,描述的是图像中具有该灰度级的像素的个数:其中,横坐标是灰度级,纵坐标是该灰度级出现的频率。
不过通常会将纵坐标归⼀化到[0,1]区间内,也就是将灰度级出现的频率(像素个数)除以图像中像素的总数。
灰度直⽅图的计算公式如下:p (r k )=n kMN其中,r k 是像素的灰度级,n k 是具有灰度r k 的像素的个数,MN 是图像中总的像素个数。
OpenCV 灰度直⽅图的计算直⽅图的计算是很简单的,⽆⾮是遍历图像的像素,统计每个灰度级的个数。
在OpenCV 中封装了直⽅图的计算函数calcHist ,为了更为通⽤该函数的参数有些复杂,其声明如下:void calcHist( const Mat* images, int nimages,const int* channels, InputArray mask,OutputArray hist, int dims, const int* histSize,const float** ranges, bool uniform = true, bool accumulate = false );该函数能够同时计算多个图像,多个通道,不同灰度范围的灰度直⽅图.其参数如下:images ,输⼊图像的数组,这些图像要有相同⼤⼤⼩,相同的深度(CV_8U CV_16U CV_32F ).nimages ,输⼊图像的个数channels ,要计算直⽅图的通道个数。
OpenCV的初步简单讲解——高斯模糊与卷积核,通俗易懂OpenCV是一个非常实用的计算机视觉库,现在它已经在诸多学科有应用,本文先暂不讲OpenCV本身,而只简单的讲解如何实现opencv中如何模糊成像,与卷积的简单介绍。
什么是高斯模糊?模糊当然是人眼睛看不清当然就感觉模糊啦!至于高斯,可能高斯这个人是近视吧。
好,模糊就讲到这为止。
当然不是这样,模糊是一种利用图像算法对源图像素色值进行重新合成的一种处理结果,而高斯模糊则是运用高斯函数(遵循数据正态分布)求出对应图像的卷积核在进行一定换算最后合成图像的一种特殊处理结果,当然其中有很多过程及概念,所以在了解高斯模糊成像的过程前,我们要先了解一下什么是卷积核。
卷积核一看非常高大上的名字,但是它其实就是通过某种算法(平常所听的XX卷积,XXX卷积其实就是不同算法所得出的)得出的一个结果矩阵。
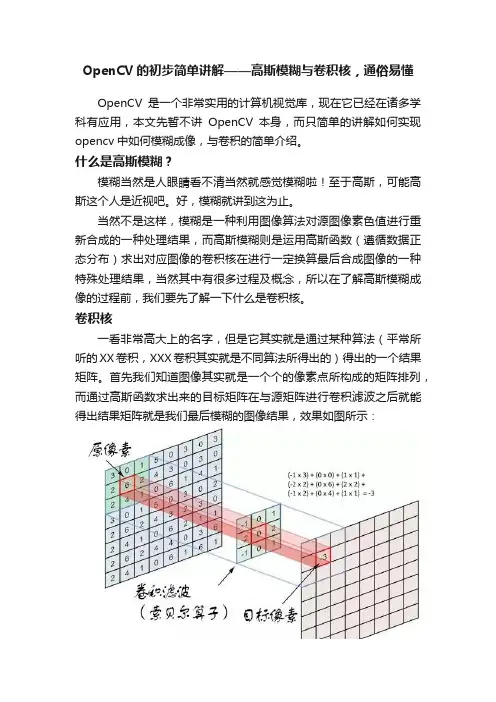
首先我们知道图像其实就是一个个的像素点所构成的矩阵排列,而通过高斯函数求出来的目标矩阵在与源矩阵进行卷积滤波之后就能得出结果矩阵就是我们最后模糊的图像结果,效果如图所示:卷积滤波我们先把卷积核放到一边,重点先看一下原像素是如何通过卷积滤波来得到目标像素的。
如图所示,如果我们想要得到图中的目标像素(第二排第二列),那么我需要同样的找到原像素和原像素周围的一圈像素(3*3的矩阵),然后根据周围一圈的值进行加权运算。
(-1*3)+(0*0)+(1*1)+(-2*2)+(0*6)+(2*2)+(-1*2)+(0*4)+(1*1)=-3通过计算我们便能得到目标像素的值为-3,其实这就是高斯模糊的过程,原像素矩阵就是通过一大堆的类似的运算来得到高斯模糊后的目标像素矩阵的,这就是模糊成像的过程。
当然我们还需继续理解一下模糊成像的原理。
模糊成像一般原理我们现在仅仅了解模糊的一个过程那么我们还应该知道模糊成像的一般原理是什么样的。
还是让我们来画个图理解更好帮助解释(我们先假设每个头都是一个像素点):例1如上图所示,如果我们想对中心像素点可可萝进行一次模糊处理那么应该怎么做,既然是模糊处理那么就是要通过周边像素的值来确定自身的值应该是多少,显然照上图来看的话,完成模糊处理很简单,就是求出周边的加权平均,由于周围一圈全是臭鼬头,所以显而意见中间的可可萝也会被平均计算成臭鼬头。
【二值形态学膨胀、腐蚀、开、闭运算opencv的深度解析】一、概念介绍1. 二值形态学在图像处理中,二值形态学是一种针对二值图像进行的形态学操作,主要包括膨胀、腐蚀、开、闭运算等。
2. 膨胀膨胀是二值形态学中的一种基本操作,它能够使目标区域扩张并填充内部的空洞,从而使目标变大。
3. 腐蚀腐蚀是二值形态学中的另一种基本操作,它能够使目标区域收缩并去除边缘细节,从而使目标变小。
4. 开运算开运算是先腐蚀后膨胀的组合操作,可以用来去除图像中的噪声和小的干扰目标。
5. 闭运算闭运算是先膨胀后腐蚀的组合操作,可以用来填补图像中的小孔和裂缝。
二、深入探讨1. 膨胀的原理和作用膨胀通过结构元素的滑动来扩张目标区域,可以使目标变大,填充空洞,连接断裂的目标,是图像处理中常用的操作之一。
2. 腐蚀的原理和作用腐蚀通过结构元素的滑动来收缩目标区域,可以使目标变小,去除边缘细节,分离接触的目标,也是图像处理中常用的操作之一。
3. 开闭运算的应用场景开运算通常用于去除图像中的小噪声和杂点,可以平滑目标轮廓,提高目标边缘的连通性;闭运算通常用于填补图像中的小孔和断裂,可以使目标更加完整,减少断裂和裂缝。
4. opencv中的二值形态学函数opencv提供了丰富的二值形态学函数,可以方便地进行膨胀、腐蚀、开、闭运算,如cv2.dilate()、cv2.erode()、cv2.morphologyEx()等,可以通过设置结构元素的形状和大小来调整操作效果。
5. 个人观点和理解对于二值形态学操作,我认为膨胀和腐蚀是其基础,而开闭运算则是在这两者基础上的进一步应用,能够更加精细地处理目标区域,去除干扰和噪声,提取有效信息。
在实际应用中,需要根据具体情况选择不同的操作和参数,以达到最佳的处理效果。
三、总结回顾通过本文的介绍和分析,我们深入理解了二值形态学中的膨胀、腐蚀、开、闭运算的原理和作用,以及在opencv中的应用方式。
我们也从个人观点出发,探讨了这些操作的实际意义和效果。
Opencv是一个开源计算机视觉库,可用于处理图像和视频。
在Opencv中,缩放、旋转和模板匹配是常见的图像处理操作,了解这些操作的原理对于深入理解Opencv的工作原理非常重要。
本文将对Opencv中缩放、旋转和模板匹配的原理进行详细介绍,希望能帮助读者更好地掌握图像处理的相关知识。
一、缩放原理1.1 缩放的概念在图像处理中,缩放是指改变图像的尺寸大小。
通常情况下,我们会将图像缩小或放大到需要的大小。
Opencv中提供了resize函数来实现图像的缩放操作。
1.2 缩放的原理Opencv中的resize函数使用了插值算法来实现图像的缩放。
常见的插值算法包括最近邻插值、双线性插值和立方插值。
在进行图像缩放时,resize函数会根据目标图像的大小和原始图像的大小,使用插值算法来计算新图像中每个像素的数值。
这样就可以实现图像的缩放操作。
二、旋转原理2.1 旋转的概念旋转是指改变图像的旋转角度,使得图像产生旋转的效果。
Opencv 中提供了getRotationMatrix2D和warpAffine函数来实现图像的旋转操作。
2.2 旋转的原理Opencv中的旋转操作是通过仿射变换来实现的。
使用getRotationMatrix2D函数来计算出旋转的变换矩阵。
使用warpAffine函数来对图像进行仿射变换,从而实现图像的旋转效果。
在进行仿射变换时,Opencv会对图像进行插值计算,以确保图像旋转后的质量和清晰度。
三、模板匹配原理3.1 模板匹配的概念模板匹配是一种在图像中寻找指定模式的方法。
在Opencv中,模板匹配可以用来在一幅图像中搜索和识别特定的模式。
Opencv中提供了matchTemplate和minMaxLoc函数来实现模板匹配操作。
3.2 模板匹配的原理Opencv中的模板匹配是通过将一个模板图像与另一幅目标图像进行比较来实现的。
将模板图像和目标图像转换为灰度图像。
使用matchTemplate函数对目标图像进行模板匹配计算,得到一个结果图像。
opencv4应用开发- 入门、进阶与工程化实践概述及解释说明1. 引言1.1 概述在计算机视觉领域,OpenCV是一个非常强大的开放源码库,提供了一系列用于处理图像和视频的函数。
随着计算机视觉技术的快速发展,在各个领域中广泛应用,对OpenCV的需求也越来越大。
本文主要介绍了Opencv4应用开发的入门、进阶与工程化实践。
1.2 文章结构本文分为五个部分:引言、Opencv4应用开发入门、Opencv4应用开发进阶、Opencv4应用开发工程化实践以及结论。
通过这些部分,读者将逐步了解Opencv4应用开发的基础知识,深入理解图像处理技术,并学习如何优化和加速图像处理算法,以及如何部署Opencv应用到嵌入式平台。
1.3 目的本文旨在向读者介绍Opencv4应用开发的基础知识和技巧,并通过示例代码和说明,帮助读者理解和掌握相关概念和方法。
同时,本文还将讨论未来Opencv 应用开发可能面临的挑战和趋势,为读者提供一个全面认识该领域并深入学习的基础。
无论是初学者还是具有一定经验的开发者,本文都将为他们提供有价值的指导和建议。
完成该篇文章后,读者将能够理解Opencv4应用开发所需的基础知识,并能够在实际项目中灵活运用这些知识。
2. Opencv4应用开发入门:2.1 Opencv简介:Opencv(Open Source Computer Vision Library)是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法。
它支持多种编程语言,如C++、Python等,并可在多个操作系统上运行。
Opencv被广泛应用于图像处理、目标检测与跟踪、人脸识别、机器学习等领域。
2.2 安装和配置Opencv环境:在开始使用Opencv进行应用开发前,首先需要安装和配置Opencv环境。
可以从官方网站下载适合自己的版本,并根据相应的安装指南进行安装步骤。
一般而言,安装包会包含一些基本的例子和示范代码,供用户学习和参考。
前端像识别实践利用OpenCV进行像处理与分析的教程前端图像识别实践:利用OpenCV进行图像处理与分析的教程导言:图像识别与处理是现代计算机科学领域的一个重要研究方向,它通过对图像进行人工智能算法的应用从而实现对图像的分析、识别与处理。
而在前端开发中,借助开源图像处理库OpenCV,我们能够实现丰富的图像处理与分析效果。
本教程将介绍如何在前端开发中使用OpenCV进行图像识别实践,并提供一些实用的处理示例。
一、OpenCV简介OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它提供了丰富的图像处理函数和算法,支持多种编程语言,包括C++、Python等。
OpenCV广泛应用于计算机视觉、图像识别和机器学习等领域,在前端开发中,我们可以利用OpenCV实现图像的处理、特征分析等功能。
二、环境搭建在开始前端图像识别的实践之前,我们需要先搭建好相应的开发环境。
首先,确保你的计算机已经安装好了OpenCV的相关库文件,并配置好了编译环境。
接下来,我们将使用HTML5的Canvas元素来实现图像的显示与处理,因此,你需要了解基本的HTML5技术和Canvas的使用方法。
此外,为了方便操作图像,我们还需要使用JavaScript编程语言。
三、图像处理基础在进行图像识别实践之前,我们有必要了解一些基本的图像处理概念和算法。
例如,图像的读取与显示、图像的灰度化、图像的二值化以及滤波处理等。
这些基本的概念和算法是我们进行后续图像处理与分析的基础。
四、图像识别实践1. 图像的读取与显示- 在前端开发中,我们使用<input type="file">标签来实现图像的上传功能,通过File API可以获取到用户上传的图像文件。
接下来,我们使用Canvas元素将图像显示在页面上,代码示例如下:```javascriptvar input = document.querySelector('input[type="file"]');var canvas = document.querySelector('canvas');var ctx = canvas.getContext('2d');input.addEventListener('change', function(e) {var file = e.target.files[0];var reader = new FileReader();reader.onload = function(event) {var img = new Image();img.onload = function() {ctx.drawImage(img, 0, 0, canvas.width, canvas.height);}img.src = event.target.result;}reader.readAsDataURL(file);});```2. 图像的灰度化- 图像灰度化是将彩色图像转换为灰度图像的过程。
一、概述在当今数字化时代,图像处理已经成为了许多行业中必不可少的一部分。
而OpenCV(Open Source Computer Vision Library)作为一个开源的计算机视觉库,已经受到了广泛的关注和应用。
本文将围绕OpenCV4在应用开发中的入门、进阶与工程化实践展开讨论,帮助读者更好地了解OpenCV4的使用和开发技巧。
二、OpenCV4的入门1. OpenCV4的基本介绍OpenCV是一个跨评台的计算机视觉库,由一系列开源代码和程序组成,包括用C、C++、Python等多种编程语言编写。
它广泛应用于物体识别、人脸识别、文字识别、图像处理以及机器视觉等领域。
2. 安装OpenCV4在入门阶段,读者需要了解如何在自己的开发环境中安装OpenCV4。
这涉及到不同操作系统的安装步骤,以及与开发环境的集成等内容。
3. HelloWorld示例为了熟悉OpenCV4的使用,可以通过编写一个简单的HelloWorld 示例来了解OpenCV的基本结构和功能。
三、OpenCV4的进阶1. 图像处理基础在进阶阶段,读者需要深入了解OpenCV4中的图像处理基础知识,包括图像读取、显示、保存,以及图像的色彩空间转换、图像的缩放和裁剪等内容。
2. 特征提取与匹配了解OpenCV4中特征提取与匹配的功能,可以帮助开发者在实际项目中应用图像识别和配准等技术。
3. 目标检测与跟踪学习OpenCV4中的目标检测与跟踪算法,可以帮助开发者实现在视瓶流中的物体检测和跟踪。
四、OpenCV4的工程化实践1. 结合实际场景OpenCV4的工程化实践需要结合实际的场景,包括面部识别、车牌识别、人脸检测等现实场景的图像处理和计算机视觉应用。
2. 性能优化与并行化在实际工程应用中,性能优化和并行化是很重要的一部分。
读者需要学习如何利用OpenCV4中的并行化技术和性能优化方法,以提高图像处理和计算机视觉算法的速度和效率。
3. 实战案例分析通过实际的工程化实践案例分析,读者可以更好地了解OpenCV4在不同行业领域中的应用,以及如何解决实际问题和挑战。
∙Open Source Computer Vision Library ∙∙ 论坛 ∙ 商业 ∙ 专题 ∙ 讲座 ∙ 例程 ∙ 安装 ∙ 常见问题 ∙ 函数说明Cv 图像处理Wikipedia ,自由的百科全书注意:本章描述图像处理和分析的一些函数。
大多数函数都是针对两维象素数组的,这里,我们称这些数组为“图像”,但是它们不一定非得是IplImage 结构,也可以是CvMat 或者CvMatND 结构。
目录[隐藏]∙ 1 梯度、边缘和角点o 1.1 Sobelo 1.2 Laplaceo 1.3 Cannyo 1.4 PreCornerDetecto 1.5 CornerEigenValsAndVecso 1.6 CornerMinEigenValo 1.7 CornerHarriso 1.8 FindCornerSubPixo 1.9 GoodFeaturesToTrack∙ 2 采样、插值和几何变换o 2.1 InitLineIteratoro 2.2 SampleLineo 2.3 GetRectSubPixo 2.4 GetQuadrangleSubPixo 2.5 Resizeo 2.6 WarpAffineo 2.7 GetAffineTransformo 2.8 2DRotationMatrixo 2.9 WarpPerspectiveo 2.10 WarpPerspectiveQMatrixo 2.11 GetPerspectiveTransformo 2.12 Remapo 2.13 LogPolar∙ 3 形态学操作o 3.1 CreateStructuringElementExo 3.2 ReleaseStructuringElemento 3.3 Erodeo 3.4 Dilateo 3.5 MorphologyEx∙ 4 滤波器与色彩空间变换o 4.1 Smootho 4.2 Filter2Do 4.3 CopyMakeBordero 4.4 Integralo 4.5 CvtColoro 4.6 Thresholdo 4.7 AdaptiveThreshold∙ 5 金字塔及其应用o 5.1 PyrDowno 5.2 PyrUp∙ 6 连接部件o 6.1 CvConnectedCompo 6.2 FloodFillo 6.3 FindContourso 6.4 StartFindContourso 6.5 FindNextContouro 6.6 SubstituteContouro 6.7 EndFindContourso 6.8 PyrSegmentationo 6.9 PyrMeanShiftFilteringo 6.10 Watershed∙7 图像与轮廓矩o7.1 Momentso7.2 GetSpatialMomento7.3 GetCentralMomento7.4 GetNormalizedCentralMomento7.5 GetHuMoments∙8 特殊图像变换o8.1 HoughLineso8.2 HoughCircleso8.3 DistTransformo8.4 Inpaint∙9 直方图o9.1 CvHistogramo9.2 CreateHisto9.3 SetHistBinRangeso9.4 ReleaseHisto9.5 ClearHisto9.6 MakeHistHeaderForArrayo9.7 QueryHistValue_1Do9.8 GetHistValue_1Do9.9 GetMinMaxHistValueo9.10 NormalizeHisto9.11 ThreshHisto9.12 CompareHisto9.13 CopyHisto9.14 CalcHisto9.15 CalcBackProjecto9.16 CalcBackProjectPatcho9.17 CalcProbDensityo9.18 EqualizeHist∙10 匹配o10.1 MatchTemplateo10.2 MatchShapeso10.3 CalcEMD2[编辑]梯度、边缘和角点[编辑]Sobel使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );src输入图像.dst输出图像.xorderx 方向上的差分阶数yordery 方向上的差分阶数aperture_size扩展 Sobel 核的大小,必须是 1, 3, 5 或 7。
如何使用OpenCV进行图像处理OpenCV是一个开源的计算机视觉库,提供了很多图像处理、计算机视觉和机器学习等方面的函数和工具,被广泛应用于各种计算机视觉领域的研究和应用中。
本文将介绍如何使用OpenCV进行图像处理,包括图像读写、基本操作、图像滤波和图像变换等内容。
一、图像读写在OpenCV中,可以使用imread()函数读取图像,使用imwrite()函数将图像保存到文件中。
其中,imread()函数有两个参数:第一个参数为读取的图像文件名,第二个参数为读取模式,常用的读取模式有三种:IMREAD_COLOR(默认模式,读取彩色图像)、IMREAD_GRAYSCALE(读取灰度图像)和IMREAD_UNCHANGED(读取原始图像,包括alpha值等信息)。
例如:```cv::Mat img_color = cv::imread("color_image.jpg",cv::IMREAD_COLOR); //读取彩色图像cv::Mat img_gray = cv::imread("gray_image.jpg",cv::IMREAD_GRAYSCALE); //读取灰度图像cv::Mat img_origin = cv::imread("original_image.png",cv::IMREAD_UNCHANGED); //读取原始图像```使用imwrite()函数将图像保存为文件,第一个参数为保存的文件名,第二个参数为要保存的图像。
例如:```cv::imwrite("result.jpg", img_color); //保存彩色图像cv::imwrite("result.png", img_gray); //保存灰度图像```二、基本操作OpenCV提供了各种基本的图像操作函数,包括图像大小调整、通道分离、通道合并、通道相加、通道相减、通道相乘等操作。
opencv知识点总结1. 图像处理基础图像处理是OpenCV的核心功能之一。
OpenCV提供了丰富的图像处理算法,包括图像的读取、保存、显示、缩放、旋转、灰度化、滤波、边缘检测、直方图均衡化等。
使用OpenCV可以对图像进行各种处理操作,满足不同需求。
2. 特征检测与描述特征检测与描述是计算机视觉领域的重要研究内容,OpenCV提供了多种特征检测与描述算法,如SIFT(尺度不变特征变换)、SURF(速度加速特征)、ORB(Oriented FASTand Rotated BRIEF)等。
这些算法可以用于在图像中检测关键点,并对这些关键点进行描述,从而实现图像的特征匹配和识别。
3. 目标跟踪与运动估计目标跟踪与运动估计是在视频处理中经常遇到的问题。
OpenCV提供了多种目标跟踪算法,如基于光流的运动估计算法、卡尔曼滤波器等。
这些算法可以用于在视频中跟踪移动目标,并估计目标的运动轨迹。
4. 三维重建与立体视觉三维重建与立体视觉是计算机视觉领域的重要研究方向,OpenCV提供了多种三维重建和立体视觉算法,如立体匹配算法、三维点云重建算法、立体标定算法等。
这些算法可以用于对多张图像进行立体匹配,重建出三维场景的结构。
5. 目标识别与分类目标识别与分类是计算机视觉的经典问题,OpenCV提供了多种目标识别和分类算法,如Haar特征级联分类器、HOG(方向梯度直方图)特征分类器、深度学习模型等。
这些算法可以用于在图像中检测和识别出特定目标,如人脸、车辆、物体等。
6. 机器学习与模式识别OpenCV还提供了多种机器学习和模式识别算法,如支持向量机(SVM)、K均值聚类、决策树、随机森林等。
这些算法可以用于对图像数据进行分类、聚类、回归等任务,实现图像的智能识别和分析。
7. 深度学习与神经网络随着深度学习技术的兴起,OpenCV也提供了对深度学习和神经网络的支持。
OpenCV对多种深度学习框架(如TensorFlow、PyTorch)进行了整合,并提供了神经网络模型的导入、预测、微调等功能。
OpenCV图像处理之常见的图像灰度变换1.灰度线性变换图像的灰度线性变换是图像灰度变换的⼀种,图像的灰度变换通过建⽴灰度映射来调整源图像的灰度,从⽽达到图像增强的⽬的。
灰度映射通常是⽤灰度变换曲线来进⾏表⽰。
通常来说,它是将图像的像素值通过指定的线性函数进⾏变换,以此来增强或者来减弱图像的灰度,灰度线性变换的函数就是常见的线性函数。
g(x, y) = k · f(x, y) + d设源图像的灰度值为x,则进⾏灰度线性变换后的灰度值为y = kx + b (0<=y<=255),下⾯分别来讨论k的取值变化时线性变换的不同效果(1).|k|>1时当k>1时,可以⽤来增加图像的对⽐度,图像的像素值在进⾏变换后全部都线性⽅法,增强了整体的显⽰效果,且经过这种变换后,图像的整体对⽐度明显增⼤,在灰度图中的体现就是变换后的灰度图明显被拉伸了。
(2).|k|=1时当k=1时,这种情况下常⽤来调节图像的亮度,亮度的调节就是让图像的各个像素值都增加或是减少⼀定量。
在这种情况下可以通过改变d值来达到增加或者是减少图像亮度的⽬的。
因为当k=1,只改变d 值时,只有图像的亮度被改变了,d>0时,变换曲线整体发⽣上移,图像的亮度增加,对应的直⽅图整体向右侧移动,d<0时,变换曲线整体下移,图像的亮度降低,对应的直⽅图发⽣⽔平左移。
(3).0<|k|<1时此时变换的效果正好与k>1时相反,即图像的整体对⽐度和效果都被削减了,对应的直⽅图会被集中在⼀段区域上。
k值越⼩,图像的灰度分布也就越窄,图像看起来也就显得越是灰暗。
(4).k<0时在这种情况下,源图像的灰度会发⽣反转,也就是原图像中较亮的区域会变暗,⽽较暗的区域将会变量。
特别的,此时我们令k = -1,d = 255,可以令图像实现完全反转的效果。
对应的直⽅图也会发⽣相应的变化。
相应的程序试下如下://实现图像的灰度线性变化#include <iostream>#include <opencv2\core\core.hpp>#include <opencv2\highgui\highgui.hpp>#include <opencv2\imgproc\imgproc.hpp>using namespace std;using namespace cv;int main(){Mat srcImg = imread("1234.jpg");if (!srcImg.data){cout << "读⼊图⽚失败" << endl;return -1;}imshow("原图像", srcImg);double k, b;cout << "请输⼊k和b值:";cin >> k >> b;int RowsNum = srcImg.rows;int ColsNum = srcImg.cols;Mat dstImg(srcImg.size(), srcImg.type());//进⾏遍历图像像素,对每个像素进⾏相应的线性变换for (int i = 0; i < RowsNum; i++){for (int j = 0; j < ColsNum; j++){//c为遍历图像的三个通道for (int c = 0; c < 3; c++){//使⽤at操作符,防⽌越界dstImg.at<Vec3b>(i, j)[c] = saturate_cast<uchar>(k* (srcImg.at<Vec3b>(i, j)[c]) + b);}}}imshow("线性变换后的图像", dstImg);waitKey();return 0;}当k=1.2,b=50时执⾏程序的效果如下:2.灰度对数变换对数变换的基本形式为其中,b是⼀个常数,⽤来控制曲线的弯曲程度,其中,b越⼩越靠近y轴,b越⼤越靠近x轴。
openCV——几个实用函数2010年12月20日星期一 09:181. cvSmooth:各种方法的图像平滑void cvSmooth( const CvArr* src, CvArr* dst,int smoothtype=CV_GAUSSIAN,int param1=3, int param2=0, double param3=0 );src输入图像.dst输出图像.smoothtype平滑方法:. CV_BLUR_NO_SCALE (简单不带尺度变换的模糊) - 对每个象素的param1×param2 领域求和。
如果邻域大小是变化的,可以事先利用函数cvIntegral 计算积分图像。
. CV_BLUR (simple blur) - 对每个象素param1×param2邻域求和并做尺度变换 1/(param1.param2).. CV_GAUSSIAN (gaussian blur) - 对图像进行核大小为param1×param2 的高斯卷积. CV_MEDIAN (median blur) - 对图像进行核大小为param1×param1 的中值滤波 (i.e. 邻域是方的).. CV_BILATERAL (双向滤波) - 应用双向 3x3 滤波,彩色sigma=param1,空间 sigma=param2. 平滑操作的第一个参数.param2平滑操作的第二个参数. 对于简单/非尺度变换的高斯模糊的情况,如果param2的值为零,则表示其被设定为param1。
param3对应高斯参数的 Gaussian sigma (标准差). 如果为零,则标准差由下面的核尺寸计算:sigma = (n/2 - 1)*0.3 + 0.8, 其中 n=param1 对应水平核,n=param2 对应垂直核.对小的卷积核 (3×3 to 7×7) 使用如上公式所示的标准 sigma 速度会快。
如果 param3 不为零,而 param1 和 param2 为零,则核大小有sigma 计算 (以保证足够精确的操作).函数 cvSmooth 可使用上面任何一种方法平滑图像。
每一种方法都有自己的特点以及局限。
没有缩放的图像平滑仅支持单通道图像,并且支持8位到16位的转换(与cvSobel和cvaplace相似)和32位浮点数到32位浮点数的变换格式。
简单模糊和高斯模糊支持 1- 或 3-通道, 8-比特和 32-比特浮点图像。
这两种方法可以(in-place)方式处理图像。
中值和双向滤波工作于 1- 或 3-通道, 8-位图像,但是不能以 in-place 方式处理图像.2.IplImage结构由于OpenCV主要针对的是计算机视觉方面的处理,因此在函数库中,最重要的结构体是IplImage结构。
IplImage结构来源于Intel的另外一个函数库Intel Image Processing Library (IPL),该函数库主要是针对图像处理。
IplImage结构具体定义如下:typedef struct _IplImage{int nSize; /* IplImage大小 */int ID; /* 版本 (=0)*/int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道*/int alphaChannel; /* 被OpenCV忽略 */int depth; /* 像素的位深度,主要有以下支持格式:IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,IPL_DEPTH_16S, IPL_DEPTH_32S,IPL_DEPTH_32F 和IPL_DEPTH_64F */char colorModel[4]; /* 被OpenCV忽略 */char channelSeq[4]; /* 同上 */int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.只有cvCreateImage可以创建交叉存取图像 */int origin; /*图像原点位置: 0表示顶-左结构,1表示底-左结构*/int align; /* 图像行排列方式 (4 or 8),在 OpenCV 被忽略,使用 widthStep 代替 */int width; /* 图像宽像素数 */int height; /* 图像高像素数*/struct _IplROI *roi; /* 图像感兴趣区域,当该值非空时,只对该区域进行处理 */struct _IplImage *maskROI; /* 在 OpenCV中必须为NULL */ void *imageId; /* 同上*/struct _IplTileInfo *tileInfo; /*同上*/int imageSize; /* 图像数据大小(在交叉存取格式下ImageSize=image->height*image->widthStep),单位字节*/char *imageData; /* 指向排列的图像数据 */int widthStep; /* 排列的图像行大小,以字节为单位 */int BorderMode[4]; /* 边际结束模式, 在 OpenCV 被忽略*/int BorderConst[4]; /* 同上 */char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */} IplImage;IplImage结构体是整个OpenCV函数库的基础,在定义该结构变量时需要用到函数cvCreatImage,变量定义方法如下:IplImage* src="/cvCreateImage"(cvSize(400,300),IPL_DEPTH_8U,3);上句定义了一个IplImage指针变量src,图像的大小是400×300,图像颜色深度8位,3通道图像。
3.常用的五个函数(I/O)1). 图像载入函数函数cvLoadImage载入指定图像文件,并返回指向该文件的IplImage 指针。
函数支持bmp、jpg、 png、 tiff等格式的图像。
其函数原型如下:IplImage* cvLoadImage( const char* filename, int iscolor);其中,filename 是待载入图像的名称,包括图像的扩展名;iscolor是一个辅助参数项,可选正数、零和负数三种值,正数表示作为三通道图像载入,零表示该图像作为单通道图像,负数表示载入图像的通道数由图像文件自身决定。
2). 窗口定义函数函数cvNamedWindow定义一个窗口,用于显示图像。
其函数原型如下:int cvNamedWindow( const char* name, unsigned long flags );其中,name是窗口名,flags是窗口属性指标值,可以选择CV_WINDOW_AUTOSIZE和0两种值。
CV_WINDOW_AUTOSIZE表示窗口尺寸与图像原始尺寸相同,0表示以固定的窗口尺寸显示图像。
3). 图像显示函数函数cvShowImage是在指定的窗口中显示图像,其函数原型如下:void cvShowImage( const char* name, const CvArr* image );其中,name是窗口名称,image是图像类型指针,一般是IplImage指针。
4). 图像保存函数函数cvSaveImage以指定的文件名保存IplImage类型的指针变量,其函数原型如下:int cvSaveImage( const char* filename, const CvArr* image );其中,filename是图像保存路径和名称,image是IplImage指针变量。
5). 图像销毁函数函数cvReleaseImage销毁已定义的IplImage指针变量,释放占用内存空间。
其函数原型如下:void cvReleaseImage( IplImage** image );其中,image为已定义的IplImage指针。
4.cvCreatImagecvCreateImage:创建头并分配数据IplImage* cvCreateImage( CvSize size, int depth, intchannels );参数说明:size 图像宽、高.depth 图像元素的位深度,可以是下面的其中之一:IPL_DEPTH_8U - 无符号8位整型IPL_DEPTH_8S - 有符号8位整型IPL_DEPTH_16U - 无符号16位整型IPL_DEPTH_16S - 有符号16位整型IPL_DEPTH_32S - 有符号32位整型IPL_DEPTH_32F - 单精度浮点数IPL_DEPTH_64F - 双精度浮点数channels:每个元素(像素)通道号.可以是 1, 2, 3 或 4.通道是交叉存取的,例如通常的彩色图像数据排列是:b0 g0 r0 b1 g1 r1 ... 虽然通常 IPL 图象格式可以存贮非交叉存取的图像,并且一些OpenCV 也能处理他, 但是这个函数只能创建交叉存取图像.函数 cvCreateImage 创建头并分配数据,这个函数是下列的缩写型式:header = cvCreateImageHeader(size,depth,channels);cvCreateData(header);5.cvLoadImageIplImage* cvLoadImage( const char* filename, intflags=CV_LOAD_IMAGE_COLOR );filename要被读入的文件的文件名(包括后缀)。
flags指定读入图像的颜色和深度:指定的颜色可以将输入的图片转为3信道(CV_LOAD_IMAGE_COLOR), 单信道 (CV_LOAD_IMAGE_GRAYSCALE), 或者保持不变(CV_LOAD_IMAGE_ANYCOLOR)。
深度指定输入的图像是否转为每个颜色信道每象素8位,(OpenCV的早期版本一样),或者同输入的图像一样保持不变。
选中CV_LOAD_IMAGE_ANYDEPTH,则输入图像格式可以为8位无符号,16位无符号,32位有符号或者32位浮点型。
如果输入有冲突的标志,将采用较小的数字值。
比如CV_LOAD_IMAGE_COLOR | CV_LOAD_IMAGE_ANYCOLOR 将载入3信道图。