第七章 根轨迹法
- 格式:ppt
- 大小:6.44 MB
- 文档页数:68
根轨迹法一、定义:〈①〉()()()01111*0=+++=+∏∏==nj imi ip s z s Ks G 。
其中*K 为根轨迹增益。
开环放大倍数∏∏===nj jmi ipzKK 11*闭环特征方程的根随参数*K 而变化的轨迹,称为根轨迹。
其符合两个条件:()()()()⎪⎩⎪⎨⎧=∠+=∠=非最小相位系统或最小相位系统相角条件:幅值条件:,2,121000ππk s G k s G s G〈②〉几条规则:①实轴上的根轨迹〈最小相位系统〉右边有奇数个零极点时,有根轨迹 〈非最小相位系统〉右边有偶数个零极点时,有根轨迹 ②根轨迹条数=Max (n,m ),起点为开环极点(0=g K ),终点为开环零点(∞→g K )③渐进线条数:(n-m )条,与实轴交点坐标:mn --=∑∑零点极点1σ与实轴夹角:()mn k -+±=πϕ121。
④分离点与会合点:使0*=dsdK ,并使*K >0的点 ⑤复数极点出射角:∑∑-+︒=量辐角其他极点至该极点的向零点至极点的向量辐角1801p θ对非最小相位系统∑∑-='量辐角其他极点至该极点的向零点至极点的向量辐角1p θ 复数零点的入射角:∑∑+-︒=角极点至该零点的向量辐量辐角其他零点至该零点的向1801z θ对非最小相位系统∑∑+-='角极点至该零点的向量辐量辐角其他零点至该零点的向1z θ⑥与虚轴交点:(a )用劳斯判据确定,用辅助方程求得(b )ωj s =代入闭环特征方程,由实部=0,虚部=0求得例1:()()()210++=s s s Ks G解:渐进线(3条):()()10321-=--+-=σ,()πππϕ,3312=+±=k由()()0211=+++s s s K,则()()21++-=s s s K ,()()026323223*=++-=++-=s s dsss s d ds dK ,得 ⎩⎨⎧-=-==-=385.0,577.1385.0,423.0*22*11K s K s 与虚轴的交点:方法一02323=+++K s s s ,劳斯阵:Ks K sKs s 0123323021-要与虚轴有交点,则有一行全零,即6032=⇒=-K K辅助方程:j s s 20632,12±=⇒=+ 方法二将ωj s =代入特征方程:()()()02323=+++K j j j ωωω2,60320332==⇒=-=-ωωωωK K 虚部:实部:,则与虚部的交点6,22,1=±=K j s 根轨迹如下图例2:()()32220+++=s s s K s G 解:渐进线一条。
4.2 绘制根轨迹的基本法则本节讨论根轨迹增益*K (或开环增益K )变化时绘制根轨迹的法则。
熟练地掌握这些法则,可以帮助我们方便快速地绘制系统的根轨迹,这对于分析和设计系统是非常有益的。
法则1 根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环零点个数m 少于开环极点个数n ,则有)(m n -条根轨迹终止于无穷远处。
根轨迹的起点、终点分别是指根轨迹增益0=*K 和∞→时的根轨迹点。
将幅值条件式(4-9)改写为∏∏∏∏==-==--=--=mi inj j mn m i i nj jsz sp sz s ps K 1111*|1||1||)(||)(|(4-11)可见当s=j p 时,0*=K ;当s=i z 时,∞→*K ;当|s|∞→且m n ≥时,∞→*K 。
法则2 根轨迹的分支数,对称性和连续性:根轨迹的分支数与开环零点数m 、开环极点数n 中的大者相等,根轨迹连续并且对称于实轴。
根轨迹是开环系统某一参数从零变到无穷时,闭环极点在s 平面上的变化轨迹。
因此,根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。
实际系统都存在惯性,反映在传递函数上必有m n ≥。
所以一般讲,根轨迹分支数就等于开环极点数。
实际系统的特征方程都是实系数方程,依代数定理特征根必为实数或共轭复数。
因此根轨迹必然对称于实轴。
由对称性,只须画出s 平面上半部和实轴上的根轨迹,下半部的根轨迹即可对称画出。
特征方程中的某些系数是根轨迹增益*K 的函数,*K 从零连续变到无穷时,特征方程的系数是连续变化的,因而特征根的变化也必然是连续的,故根轨迹具有连续性。
法则3 实轴上的根轨迹:实轴上的某一区域,若其右边开环实数零、极点个数之和为奇数,则该区域必是根轨迹。
设系统开环零、极点分布如图4-5 所示。
图中,0s 是实轴上的点,)3,2,1(=i i ϕ是各开环零点到0s 点向量的相角,)4,3,2,1(=j j θ是各开环极点到0s 点向量的相角。
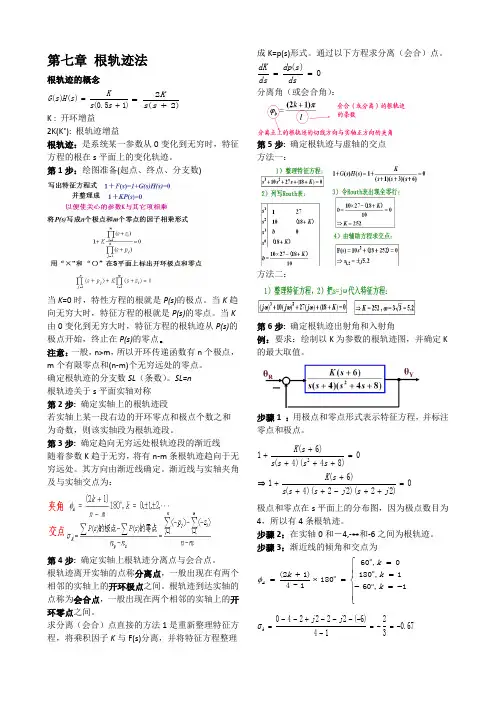
第七章根轨迹法根轨迹的概念)15.0()()(+=s s K s H s G )2(2+=s s K K : 开环增益2K(K *): 根轨迹增益根轨迹:是系统某一参数从0变化到无穷时,特征方程的根在s 平面上的变化轨迹。
第1步:绘图准备(起点、终点、分支数)当K =0时,特性方程的根就是P(s)的极点。
当K 趋向无穷大时,特征方程的根就是P(s)的零点。
当K 由0变化到无穷大时,特征方程的根轨迹从P(s)的极点开始,终止在P(s)的零点。
注意:一般,n>m ,所以开环传递函数有n 个极点,m 个有限零点和(n-m)个无穷远处的零点。
确定根轨迹的分支数SL (条数)。
SL=n 根轨迹关于s 平面实轴对称 第2步: 确定实轴上的根轨迹段若实轴上某一段右边的开环零点和极点个数之和为奇数,则该实轴段为根轨迹段。
第3步: 确定趋向无穷远处根轨迹段的渐近线 随着参数K 趋于无穷,将有n-m 条根轨迹趋向于无穷远处。
其方向由渐近线确定。
渐近线与实轴夹角及与实轴交点为:第4步: 确定实轴上根轨迹分离点与会合点。
根轨迹离开实轴的点称分离点,一般出现在有两个相邻的实轴上的开环极点之间。
根轨迹到达实轴的点称为会合点,一般出现在两个相邻的实轴上的开环零点之间。
求分离(会合)点直接的方法1是重新整理特征方程,将乘积因子K 与F(s)分离,并将特征方程整理成K=p(s)形式。
通过以下方程求分离(会合)点。
分离角(或会合角):第5步:确定根轨迹与虚轴的交点 方法一:方法二:第6步:确定根轨迹出射角和入射角例:要求:绘制以K 为参数的根轨迹图,并确定K 的最大取值。
步骤1 :用极点和零点形式表示特征方程,并标注零点和极点。
极点和零点在s 平面上的分布图,因为极点数目为4,所以有4条根轨迹。
步骤2:在实轴0和-4,-∞和-6之间为根轨迹。
步骤3:渐近线的倾角和交点为⎪⎪⎩⎪⎪⎨⎧-=-===⨯+=1,601,1800,601801-4)12(k k k k Aφ0)(==ds s dp dsdK步骤4:求分离点(汇合点)分离点在-4和0以及-∞和-6之间,则:j22122141161+++-++++=+σσσσσj 步骤5:与虚轴的交点。
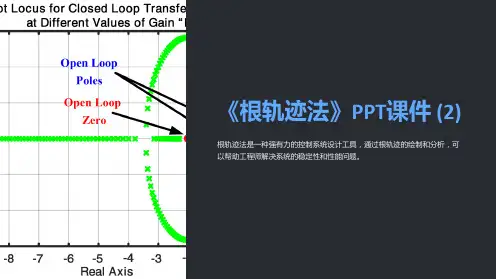
《根轨迹分析法》课件1. 课件简介根轨迹分析法是一种用于分析和设计反馈控制系统的方法,通过绘制系统的根轨迹来了解系统在不同参数下的稳定性和动态性能。
本课件将介绍根轨迹分析法的基本概念、方法和应用。
2. 课件内容2.1 根轨迹分析法的基本概念2.1.1 根轨迹的定义根轨迹是指在系统参数变化范围内,使闭环系统稳定的闭环极点轨迹。
2.1.2 根轨迹的性质(1)根轨迹是闭环极点在复平面上的轨迹,反映了闭环系统的稳定性。
(2)根轨迹的形状由系统开环传递函数的极点和零点决定。
(3)根轨迹的分布与系统参数有关,通过改变参数可以改变系统的稳定性和动态性能。
2.2 根轨迹分析法的方法2.2.1 绘制根轨迹的基本步骤(1)确定系统开环传递函数。
(2)画出开环传递函数的极点和零点。
(3)根据系统参数的变化,绘制出根轨迹。
(4)分析根轨迹的形状,判断闭环系统的稳定性。
2.2.2 根轨迹的绘制技巧(1)利用软件工具,如MATLAB,自动绘制根轨迹。
(2)手动绘制根轨迹时,注意利用对称性和周期性简化绘制过程。
2.3 根轨迹分析法的应用2.3.1 设计控制器通过分析根轨迹,可以确定控制器参数,使闭环系统具有所需的稳定性和动态性能。
2.3.2 系统优化根轨迹分析法可以帮助我们找到系统参数的最佳组合,从而优化系统的性能。
2.3.3 故障诊断分析根轨迹可以帮助我们发现系统中的故障,为故障诊断提供依据。
3. 课件总结本课件介绍了根轨迹分析法的基本概念、方法和应用。
通过学习本课件,您可以了解根轨迹分析法在控制系统设计和分析中的重要性,并掌握绘制根轨迹的基本方法。
希望这有助于您在实际工作中更好地应用根轨迹分析法。
科学性:1. 内容准确:课件内容基于控制理论的基本原理,准确地介绍了根轨迹分析法的概念、方法和应用。
2. 逻辑清晰:课件从基本概念入手,逐步深入到方法介绍和应用实例,逻辑结构清晰,易于理解。
3. 实例典型:课件中提供了控制系统的实例,帮助学习者更好地理解根轨迹分析法的应用场景。
第五章根轨迹分析方法 (2)第一节 概 述 (2)一、根轨迹概念 (2)二、闭环零、极点和开环零、极点之间的关系 (4)三、根轨迹方程 (5)第二节 根轨迹的绘制方法 (7)第三节 广义根轨迹 (31)一、参数根轨迹 (31)二、零度根轨迹 (33)三、纯滞后系统的根轨迹 (36)1. 直接法 (37)2. 有理函数近似法 (39)第四节 基于根轨迹的系统性能分析 (41)一、开环极点对控制质量的影响 (41)1. 时间常数的变化 (41)2. 开环极点的增减对系统性能的影响 (42)二、开环零点对控制质量的影响 (43)1. 开环零点位置的变化 (43)2. 开环零点的增减 (44)三、增益K的选取 (44)第五节 基于根轨迹的系统补偿器设计 (45)一、超前补偿器的设计 (46)二、滞后补偿器的设计 (49)第六节 小 结 (50)第五章 根轨迹分析方法在前面的章节中,已经介绍了系统闭环特征方程的根在S 平面上的位置直接决定闭环系统的稳定性和一些重要动态特性的概念,由此产生了两个问题:一是如何通过闭环系统特征根的分布来全面了解闭环系统的动态特性;二是如何通过对闭环系统的动态特性要求来决定闭环特征根的合理分布,进而确定控制器的结构和参数。
前者是分析问题而后者是设计问题,本章通过一种几何方法来解决这两个问题。
求解闭环系统特征方程的特征根显然是一个典型的代数问题,自然可以通过严格的代数方程求解(即解析方法)解决。
然而,实际问题中,当方程阶次增高时,解析方法难以实现或求解工作量巨大。
为了兼顾求解代数特征根方程的工作量和精度两个方面,W.R.Evans 在1948年的论文“控制系统的集合分析”中提出了一种特征根求解的几何图示方法,并在此后的几十年中得到了广泛的应用,这就是根轨迹分析方法。
随着计算机技术的发展和计算数学的完善,尤其是CAD 软件的广泛应用,避免了传统的根轨迹方法需要手工作图的繁琐计算,使得该方法更易使用和普及。