打磨抛光机器人控制系统设计与开发
- 格式:pdf
- 大小:1.56 MB
- 文档页数:3
打磨抛光机器人五大技术知识研究制造打磨抛光机器人这五大方面的技术知识必须要了解,下面就为大家详细的介绍一下这五大知识技能1、打磨抛光机器人控制系统硬件结构控制器是机器人系统的核心,国外有关公司对我国实行严密封锁。
近年来随着微电子技术的发展,微处理器的性能越来越高,而价格则越来越便宜,目前市场上已经出现了1-2美金的32位微处理器。
高性价比的微处理器为机器人控制器带来了新的发展机遇,使开发低成本、高性能的机器人控制器成为可能。
为了保证系统具有足够的计算与存储能力,目前机器人控制器多采用计算能力较强的ARM系列、DSP 系列、POWERPC系列、Intel系列等芯片组成。
此外,由于已有的通用芯片在功能和性能上不能完全满足某些机器人系统在价格、性能、集成度和接口等方面的要求,这就产生了机器人系统对SoC (SystemonChip)技术的需求,将特定的处理器与所需要的接口集成在一起,可简化系统外围电路的设计,缩小系统尺寸,并降低成本。
例如,Actel公司将NEOS或ARM7的处理器内核集成在其FPGA产品上,形成了一个完整的SoC系统。
在机器人运动控制器方面,其研究主要集中在美国和日本,并有成熟的产品,如美国DELTATAU公司、日本朋立株式会社等。
其运动控制器以DSP技术为核心,采用基于PC 的开放式结构。
2、打磨抛光机器人控制系统体系结构在控制器体系结构方面,其研究重点是功能划分和功能之间信息交换的规范。
在开放式控制器体系结构研究方面,有两种基本结构,一种是基于硬件层次划分的结构,该类型结构比较简单,在日本,体系结构以硬件为基础来划分,如三菱重工株式会社将其生产的PA210可携带式通用智能臂式机器人的结构划分为五层结构;另一种是基于功能划分的结构,它将软硬件一同考虑,其是机器人控制器体系结构研究和发展的方向。
3、打磨抛光机器人控制软件开发环境在机器人软件开发环境方面,一般工业机器人公司都有自己立的开发环境和立的机器人编程语言,如日本Motoman公司、德国KUKA 公司、美国的Adept公司、瑞典的ABB公司等。
智能抛光系统设计与实现的研究概述一、智能抛光系统概述智能抛光系统是工业自动化领域中的一项重要技术,它通过集成先进的传感器、控制算法和机器学习技术,实现对抛光过程的精确控制和智能化管理。
这种系统能够显著提高生产效率,降低成本,同时提升产品质量,满足现代制造业对高精度和高一致性的需求。
1.1 智能抛光系统的核心特性智能抛光系统的核心特性主要体现在以下几个方面:- 自适应控制:系统能够根据抛光对象的材料特性和表面状态,实时调整抛光参数,实现最优的抛光效果。
- 精确定位:利用高精度的定位系统,确保抛光工具与工件之间的相对位置精确,避免过度抛光或抛光不均。
- 智能诊断:通过集成的传感器收集数据,系统能够对抛光过程中可能出现的问题进行诊断,并提出解决方案。
- 数据分析:系统能够对抛光过程中收集的数据进行分析,优化抛光策略,提高抛光效率和质量。
1.2 智能抛光系统的应用场景智能抛光系统的应用场景非常广泛,包括但不限于以下几个方面:- 金属加工:在金属制品的表面处理过程中,智能抛光系统能够提供高质量的抛光效果,满足航空航天、汽车制造等行业的高标准要求。
- 电子产品制造:在电子行业的精密部件制造中,智能抛光系统能够保证部件的表面光洁度,提高产品的可靠性和性能。
- 医疗器械制造:医疗器械对表面处理有极高的要求,智能抛光系统能够确保医疗器械的表面达到医用级别的光洁度和卫生标准。
二、智能抛光系统的设计与实现智能抛光系统的设计与实现是一个多学科交叉的复杂工程,涉及到机械设计、电子工程、计算机科学和材料科学等多个领域。
2.1 系统架构设计智能抛光系统的架构设计是整个系统开发的基础,它包括以下几个关键组成部分:- 硬件平台:包括抛光机械臂、传感器、执行器等硬件设备,它们是实现抛光功能的物质基础。
- 控制系统:负责协调和管理整个抛光过程,包括运动控制、力控制和自适应控制等。
- 数据处理单元:对传感器收集的数据进行处理和分析,为控制决策提供支持。
方形灭菌器自动打磨抛光机器人控制系统设计摘要:抛光是制造业必不可少的基本过程。
传统的打磨一般是手工制作的,劳动力大,工作环境差因此,近年来,中国纺织业从业人员人数大幅减少,招聘困难现象日益普遍。
从生产的角度来看,手动操作也存在生产率低和产品一致性差等问题。
在3C工业中,硬件家具、医疗设备、汽车零部件、小型家用电器、重工业、玻璃工业等,几乎制造业的各个方面,抛光机器人在市场上接受巨大的需求。
关键词:方形灭菌器;自动打磨抛光;机器人控制系统引言抛光通常是产品的最后机械加工过程,在质量、外观、成本控制等方面起着重要作用由于使用成本高,而且使用面积相对较小,传统喷油器尚未得到广泛使用;手工抛光也对操作人员的技能要求很高,身体损伤很大,产品一致性较差。
因此,越来越多的企业关注具有高度自动化、适应性强、处理质量低和环境损害低等优点的自动抛光系统。
1.打磨抛光机器人及应用系统抛光机器人可以代替零件的传统手工抛光工作,主要用于各种材料零件的表面抛光、毛刺、成型线以及内腔角和内孔的焊接等。
它可用于卫浴、金属工具、家用家具、医疗器械、3C工业、工业零部件等行业抛光系统通常由定位机构、自适应精度调整工具、抛光机器人、抛光工具、力矩控制系统、检测设备、产品输出设备、控制系统等组成。
,具有以下优点:提高产品抛光质量和精加工性,保证产品的稳定性和一致性;提高生产效率,确保24小时不间断运行;改善工人的工作条件,防止他们在危险条件下长期工作;降低工人对业务技能的要求;它能够开发,用户可以对不同的部件进行两次编程,缩短产品更换周期,减少相应的设备投资。
自动化应用单元工艺流程和关键设备的抛光和抛光。
进入应用单元中要研磨的零件后,机床首先进行特性识别和定位;接下来,抛光机器人导入零件的抛光路径,选择合理的抛光工具,并与机床平台协调对零件进行抛光;最后,测试抛光质量,并根据检测结果输出不同流动线的零件。
2.抛光机系统的技术要求当砂轮开关激活时,前后电机以及左右电机应检查磨头的初始位置,并按规定完成磨削过程。
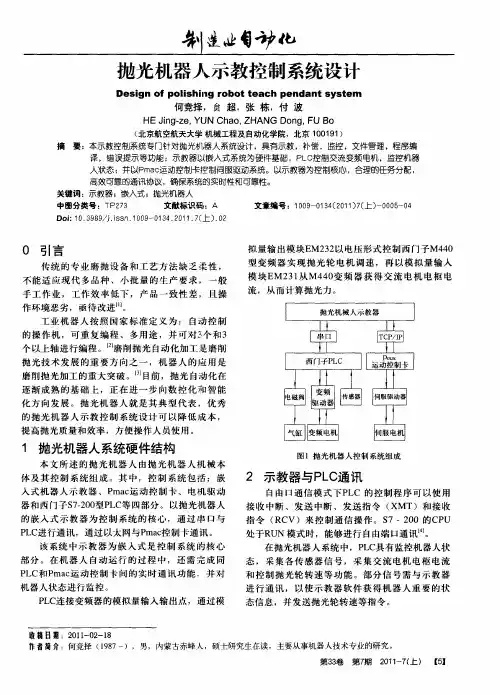
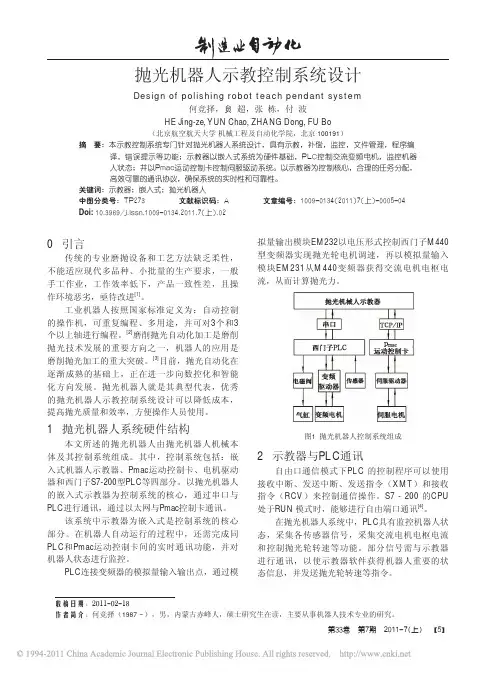
0 前言近年来,随着机器人技术的不断发展,不同类型、不同功能的工业机器人相继诞生[1]。
机器人控制器是影响机器人性能的关键部分之一,在很大程度上会对机器人的发展造成影响[2]。
机器人控制器是根据指令以及传感信息控制机器人,以完成作业任务的装置[3]。
目前,随着人工智能、计算机科学、传感器技术以及其他学科的进步,打磨机器人的研究水平也逐渐提高,与此同时,也对控制器的性能提出了更高的要求。
为满足打磨机器人对控制器性能的要求,该文设计了新型机器人控制器,该机器人控制器结构简单、运行可靠。
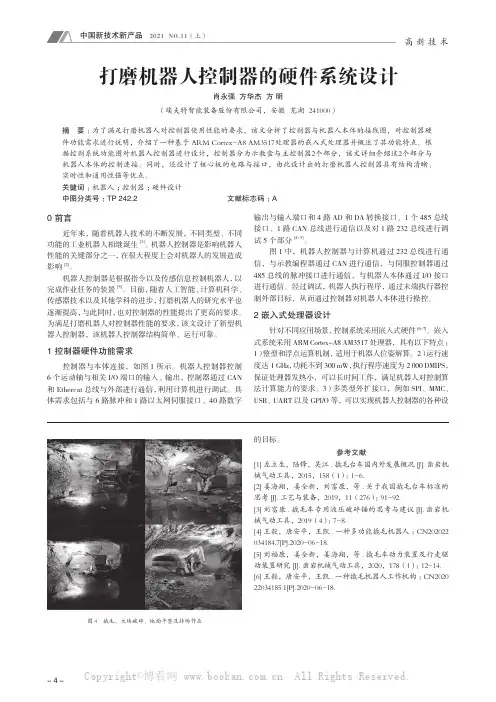
1 控制器硬件功能需求控制器与本体连接,如图1所示。
机器人控制器控制6个运动轴与相关I/O 端口的输入、输出,控制器通过CAN 和Ethercat 总线与外部进行通信,利用计算机进行调试。
具体需求包括与6路脉冲和1路以太网伺服接口、40路数字输出与输入端口和4路AD 和DA 转换接口、1个485总线接口、1路CAN 总线进行通信以及对1路232总线进行调试5个部分[4-5]。
图1中,机器人控制器与计算机通过232总线进行通信,与示教编程器通过CAN 进行通信,与伺服控制器通过485总线的脉冲接口进行通信,与机器人本体通过I/O 接口进行通信。
经过调试,机器人执行程序,通过末端执行器控制外部目标,从而通过控制器对机器人本体进行操控。
2 嵌入式处理器设计针对不同应用场景,控制系统采用嵌入式硬件[6-7]。
嵌入式系统采用ARM Cortex-A8 AM3517处理器,具有以下特点:1) 整型和浮点运算机制,适用于机器人位姿解算。
2) 运行速度达1 GHz,功耗不到300 mW,执行程序速度为2 000 DMIPS,保证处理器发热小,可以长时间工作,满足机器人对控制算法计算能力的要求。
3) 多类型外扩接口,例如SPI、MMC、USB、UART 以及GPI/O 等,可以实现机器人控制器的各种设打磨机器人控制器的硬件系统设计肖永强 方华杰 方 明(埃夫特智能装备股份有限公司,安徽 芜湖 241000)摘 要:为了满足打磨机器人对控制器使用性能的要求,该文分析了控制器与机器人本体的接线图,对控制器硬件功能需求进行说明,介绍了一种基于ARM Cortex-A8 AM3517处理器的嵌入式处理器并概述了其功能特点。

机器人智能打磨抛光关键技术及装备研发与应用篇一我家附近有个小作坊,专门做一些金属工艺品。
作坊的主人是老张,一个很和善但也很辛苦的大叔。
我经常去他那儿看他捣鼓那些金属物件,每次去都能看到他在那打磨抛光,双手黑乎乎的,脸上也总是带着疲惫。
有一次我忍不住问他:“老张叔,你这天天这么磨啊擦啊的,多累啊,就没有什么机器能帮帮你吗?”老张叔无奈地笑了笑说:“哪有那么容易哦,那些大机器太贵咱用不起,小机器又不好使,还是自己的手最靠谱。
”看着老张叔满是老茧的手,我心里有点不是滋味。
其实啊,在很多行业都存在这样的问题,就像老张叔这样的小作坊,还有一些大型的制造企业,在打磨抛光这个环节都面临不少挑战。
这时候机器人智能打磨抛光技术就该闪亮登场啦。
你可别小瞧这个技术,它可不是简单地把一个机器人拿来就开始打磨。
这里面的关键技术可多着呢。
首先得让机器人知道要打磨的东西长啥样,这就涉及到复杂的三维模型识别技术。
就好比你要给一个陌生人画像,你得先看清楚他的脸长什么样,有哪些特征,机器人也得先把要打磨的工件形状、尺寸等信息了解得清清楚楚,才能开始干活。
然后就是打磨力度的控制。
这就像我们按摩的时候,力度轻了不起作用,力度重了人就疼得受不了。
机器人打磨也一样,太轻了打磨不干净,太重了就可能损坏工件。
这时候就得靠精密的力控技术,让机器人的“手”能够根据工件的材料、形状等因素,恰到好处地施加打磨力度。
还有轨迹规划技术。
这就像是给机器人规划一条旅行路线一样。
要让机器人的打磨工具能够按照最合理的路线在工件上移动,既不能有遗漏的地方,也不能走冤枉路,这样才能高效地完成打磨任务。
而装备研发也不容易。
你想啊,机器人得适应各种不同的工作环境,有的地方灰尘大,有的地方温度高,它得像个坚强的战士一样,不管在哪都能稳定工作。
而且它的“手臂”、“手掌”也就是打磨工具,得根据不同的工件进行定制化设计。
就像不同的手艺人要用不同的工具一样,机器人也得有一套适合各种情况的装备。
AUTOMOBILE DESIGN | 汽车设计一种工业机器人打磨工作站的控制系统设计李皓武昌工学院 湖北省武汉市 430000摘 要: 本文设计一种工业机器人的打磨工作站控制系统,打磨产品为风机机壳,从总体方案的设计,设备间的通讯设计,PLC程序几方面进行了阐述。
关键词:打磨 工业机器人 控制系统1 引言随着国内传统制造产业的转型升级的需求,传统制造型企业对自动化的需求不断提高。
传统的手工打磨作业存在打磨质量不稳定、效率低、且产品的均一性差。
且工作环境恶劣,粉尘和噪声严重影响工人的健康。
对打磨工人的技术水平要求相对比较高,产品的质量也不稳定,满足不了自动化生产需求。
本文设计一种控制系统来实现对工业机器人打磨作业的控制,提高打磨作业的智能化程度以及工业生产的效率。
2 控制系统的设计要求此设计打磨产品为风机机壳,工业机器人型号为IRB460(ABB),机器人末端执行器有打磨头和抓手用于打磨机壳和抓取机壳,实现的控制流程如下:人工将产品放置在工装后,按下夹紧按钮后,夹紧气缸动作,将产品固定,机器人在得到产品到位信号后,开始按设定的程序进行打磨作业,打磨完成后,机器人手持工具切换为抓手,将产品搬运到指定位置。
打磨工作站有人机交互界面,使用者可在人机界面上切换手动和自动模式,自动模式下能实现整个系统的启动和停止的控制。
手动模式能实现对气缸的点动控制,手动调用机器人打磨和搬运等程序的功能。
3 打磨工作站控制系统的总体方案图1I/O连接I/O连接以太网通讯触摸屏打磨设备工业机器人S7-1200 PLC与MCGS TPC7062TX触摸屏都有一个网口可进行以太网通讯,可实现与MCGS TPC7062TX的数据交互,实现工作人员通过在触摸屏来控制和监控现场产品的生产。
S7-1200 PLC与机器人之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
S7-1200 PLC与打磨设备之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
DLRB-2600机器人打磨抛光实训系统技术文件图片仅供参考,以实际配置为准一、设备概述该系统依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求设计研发而成。
该系统由该系统涵盖了机、电、光、气一体化专业中所涉及的多学科、多专业综合知识,可最大程度缩短培训过程与实际生产过程的差距,涉及的技术包括:PLC 控制技术、传感器检测技术、气动技术、电机驱动技术、计算机组态监控及人机界面、机械结构与系统安装调试、故障检测技术技能、触摸屏技术、运动控制、计算机技术及系统工程等。
二、设备特点1、系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2、系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3、模块化结构,各任务模块可与机器人组合完成相应任务4、开放式设计:可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
三、技术参数1、三相四线380V±10% 50HZ2、工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m3、电源控制:自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4、输出电源:(1)三相四线380V±10% 50HZ(2)直流稳压电源:24V/5A,7、机器人:ABB IRB2600四、各模块简介1、实训台实训台体采用优质钢板(板厚1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板(板厚1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板,采用内嵌按钮和指示灯,分别为“启动”、“停止”、“复位”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。
抛光打磨机器人控制系统的电气设计发表时间:2019-09-17T10:03:07.410Z 来源:《电力设备》2019年第7期作者:廖启雁[导读] 摘要:着各行业工艺水平的进步,加工制造业对零部件的表面精度要求越来越高,研磨和抛光工艺也就越来越多的成为零件加工的最后一道工序。
(广州数控设备有限公司广东广州 510530)摘要:着各行业工艺水平的进步,加工制造业对零部件的表面精度要求越来越高,研磨和抛光工艺也就越来越多的成为零件加工的最后一道工序。
人工打磨拋光由于对人体的高危害和效率低下,使得传统制造型企业对机器人应用需求不断提高。
抛光打磨机器人,用于替代传统人工打磨,主要用于工件的表面打磨、去毛刺、焊缝打磨以及螺孔去毛刺等工作。
基于此,笔者结合自身工作实践,主要对抛光打磨机器人控制系统的电气设计进行分析,以供参考。
关键词:抛光机器人;PLC;控制系统当今工业机器人在机床上的应用己成为加工制造业发展的一大趋向。
机器人的机械手臂灵活多样,通过对工人的动作进行分析与实验,提取打磨过程参数,编程控制机器人,能够模拟工人的动作,从而达到替代人工的目的。
为了扩展机器人的应用领域,紧跟国际上机器人技术的研究趋势,下面笔者主要结合自身经验,本文设计了一套打磨机器人电气控制系统,分析打磨机器人电气控制系统的功能设计要求和设计。
1抛光打磨机器人电气控制系统的功能设计要求抛光打磨机器人的电气控制系统的功能在很大程度上决定着抛光打磨机器人的整体功能的实现。
根据对工业现场的了解,抛光打磨机器人电气控制系统应具备以下功能:1.1对机器人的运行状态进行控制,包括控制机器人各个伺服电机的启动与停止、正转与反转,各个气缸控制,电气比例闽的控制,让机器人的各个转动关节协调地工作。
1.2抛光打磨机器人应当具有供电安全控制功能,并且电源供电的状态能在面板上显示出来。
1.3抛光打磨机器人控制系统应当具备显示功能,通过触摸屏来进行提供用户各种控制操作接口,并且可以显示出机器的运行状态,同是还能让用户更加方便简单的了解控制系统状态以及抛光打磨机器人的相应的设定工作方式。
基于 PLC的机器人打磨控制系统设计摘要:机器人打磨技术越来越多的应用在工业领域,面对复杂的打磨工艺,机器人柔性加工变的越来越重要:针对这一问题设计开发了基于西门子PLC的和触摸屏的机器人打磨控制系统,阐述了控制系统的硬件组成、程序实现及一些关键的技术问题,生产实践证明此打磨控制系统运行稳定、操作灵活、满足工艺要求,有广阔的应用前景。
关键词:PLC;机器人打磨;自动化;软件设计前言:随着机器人应用技术的发展,机器人打磨技术逐渐应用在各行各业,在实际应用中往往是很多个不同结构的工件都需要在该打磨设备上进行打磨,而且打磨要求也越来越严格,这就需要有上料系统、变位机、工具库(打磨头更换系统)等不同的单个系统共同组成一个完整的控制系统,机器人在控制系统的作用下协调各个部分来完成工件的打磨。
为了解决这些需求,设计了一种机器人打磨控制系统,不但实现了机器人和各个部件之间的协调动作还可以与第三方设备通信,实现生产线的连续生产。
一、硬件组成系统主要部件:工业6轴机器人用于携带打磨工具对工件打磨;变位机作为工件的打磨平台,由3KW伺服电机控制,在打磨过程中可根据工艺需要进行正反方向360°旋转,且其台面上配有工装板用于工件的定位、夹紧;工具库为密闭工具库,配有气缸控制的开关门,用于存放打磨工具和打磨头,且可以防止所存放的配件免受打磨粉尘的污染;该打磨系统需要多个打磨头、1个电主轴、1个轴向气主轴和1个径向气主轴。
系统需要和机器人及第三方设备进行通信。
系统控制总体机构如图1所示。
系统采用西门子PLC-1200(DC/DC/DC)做控制器,根据系统的控制要求和控制规模,需要的输入和输出点数分别为96和40。
选择1个2*14Bit模拟量模块用来控制电主轴和伺服电机,且伺服电机的控制采用闭环,两个ET200SP作为分布式分别控制变位机和工具库。
操作台独立设置,使用西门子10寸触摸屏组态操作画面作为人机界面的操作。
全自动打磨抛光工业机器人系统研发摘要:为实现工件的全自动打磨抛光,需通过Pro/E 建模设计工业机器人本体、上下料系统、打磨平台及机构,从而研发并控制自动打磨抛光工业机器人系统,通过以太网通讯关联 PLC 与控制柜。
关键词:打磨抛光机器人;数学建模;模糊变结构控制;Pro/E建模一、全自动打磨抛光工业机器人总体方案目前,研发全自动打磨抛光工业机器人有利也存在弊端,优势是可以充分展现机器人优于人工的生产稳定性、联系性以及优化性能,通过设定最优抛光动作,在一定程度上可以提升抛光质量及效率;而弊端是工业环境制约研发过程发展。
一方面,原有生产环境影响现有机械结构,因此所设计的机械结构需结合现有生产环境及尺寸;另一方面,设计机器人系统需满足金属抛光打磨所需的高灵活性以及高精准性设计要求[1]。
(一)全自动打磨抛光工业机器人整体结构布局其结构如下图所示,机器人本体、上下料系统、更换打磨工装机构等进行组合构成完整系统。
对于所设计结构布局要求如下:首先,设置合理尺寸配合机器人本体使用;其次,合理安排控制柜、辅助工装、传送带、上料机构、机器人以及工作台、线槽等位置,为实现全自动打磨抛光奠定有效基础。
全自动打磨抛光工业机器人系统整体结构布局Pro/E 建模打磨抛光工艺流程为:首先,带有真空吸盘的机器人打磨系统模块通过真空抓取待打磨抛光工件,并放置于打磨台中,大打磨头自动安装打磨砂布负责抛光打磨工件表面,小打磨头负责抛光打磨工件侧面,打磨好的工件会通过真空吸盘放置于传送带,完成工件抛光打磨过程。
打磨抛光机器人系统 Pro/E 建模二、全自动打磨抛光工业机器人及辅助系统设计(一)机器人主体研究全自动打磨抛光工业机器人,主要研究内容包含机器人控制算法、尺寸、机器人运动速度以及旋转半径等重要参数。
本文选用的全自动打磨抛光工艺机器人系统为 FUNAC M-10iA 型机器人,需要注意的是机器人的选择需根据工种类型,择优而选。