测频系统测量误差分析及其应用
- 格式:pdf
- 大小:140.12 KB
- 文档页数:2
GNSS测量误差分析与修正方法GNSS(Global Navigation Satellite System)全球导航卫星系统是一种基于卫星定位技术的导航与定位系统。
在现代社会中,GNSS已经成为许多行业的重要工具,例如航空航天、交通运输、地质勘探以及城市规划等。
然而,在GNSS测量过程中,由于多种因素的影响,测量结果可能会受到一定的误差。
本文将对GNSS测量误差的产生原因进行分析,并探讨常见的修正方法。
首先,我们来了解一下GNSS测量误差的来源。
在GNSS测量过程中,有以下几个主要的误差源:1. 天线相位中心偏差:天线在接收信号时,由于设计和制造的原因可能存在相位中心偏差,导致测量结果产生误差。
2. 大气层延迟:卫星信号在穿过大气层时会发生折射,导致信号传播时间延长,从而引起位置定位误差。
3. 多径效应:卫星信号在传播过程中会受到地面和建筑物的反射,导致多个路径的信号同时到达接收器,使得接收到的信号出现多径效应,从而产生测量误差。
4. 时钟误差:测量过程中使用的时钟可能存在一定的偏差,导致定位结果出现误差。
5. 数据处理误差:在GNSS数据处理过程中,由于算法的近似和假设,可能会引入一定的误差。
针对以上误差源,研究人员提出了一系列的修正方法来减小测量误差。
下面将分别介绍这些方法。
1. 相位中心偏差的修正:可以通过对天线相位中心的测量和建模,对接收到的信号进行相应的修正。
这种方法可以在数据处理过程中对测量结果进行修正,减小位置定位误差。
2. 大气层延迟的修正:测量中常常使用双频观测来估计大气层延迟,并进行相应的修正。
此外,还可以通过使用大气层模型,根据卫星信号的传播路径对延迟进行估计,从而减小误差。
3. 多径效应的修正:可以使用多普勒滤波器或者抗多径接收算法来减小多径效应带来的误差。
这些方法可以通过抑制多径信号的影响,提高接收到的信号质量。
4. 时钟误差的修正:可以通过使用更精确的时钟来减小时钟误差带来的影响。
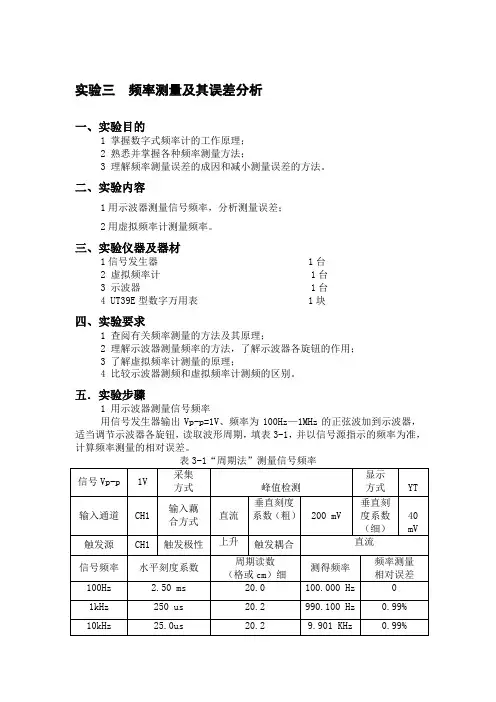
实验三频率测量及其误差分析一、实验目的1 掌握数字式频率计的工作原理;2 熟悉并掌握各种频率测量方法;3 理解频率测量误差的成因和减小测量误差的方法。
二、实验内容1用示波器测量信号频率,分析测量误差;2用虚拟频率计测量频率。
三、实验仪器及器材1信号发生器 1台2 虚拟频率计 1台3 示波器 1台4 UT39E型数字万用表 1块四、实验要求1 查阅有关频率测量的方法及其原理;2 理解示波器测量频率的方法,了解示波器各旋钮的作用;3 了解虚拟频率计测量的原理;4 比较示波器测频和虚拟频率计测频的区别。
五.实验步骤1 用示波器测量信号频率用信号发生器输出Vp-p=1V、频率为100Hz—1MHz的正弦波加到示波器,适当调节示波器各旋钮,读取波形周期,填表3-1,并以信号源指示的频率为准,计算频率测量的相对误差。
表3-1“周期法”测量信号频率信号Vp-p 1V 采集方式峰值检测显示方式YT输入通道CH1 输入藕合方式直流垂直刻度系数(粗)200 mV垂直刻度系数(细)40mV触发源CH1 触发极性上升触发耦合直流信号频率水平刻度系数周期读数(格或cm)细测得频率频率测量相对误差100Hz 2.50 ms 20.0 100.000 Hz 01kHz 250 us 20.2 990.100 Hz 0.99% 10kHz 25.0us 20.2 9.901 KHz 0.99%100kHz 2.50 us 20.2 99.010 KHz 0.99% 1MHz 250 ns 20.0 1.000 MHz 0 5MHz 50.0 ns 20.2 4.950 MHz 1.00%2 用虚拟频率计测量频率用标准信号发生器输出正弦信号作为被测信号,送到DSO2902的CH-A1通道,按表3-2进行实验。
并以信号发生器指示的频率为准,计算测频误差。
表3-2虚拟计数器测频实验序号被测信号频率(Vp-p=1V)读数测得值相对误差单位(细) 数值(格)1 100Hz 0.2ms/div 50.1 99.800Hz 0.2%2 1000Hz 25us/div 40.0 1000.000Hz 03 10kHz 2us/div 50.3 9.940KHz 0.6%4 100kHz 0.25us/div 40.0 100.000KHz 05 1MHz 50ns/div 20.0 1.000MHz 06 5MHz 10ns/div 19.8 4.975MHz 0.5%3 用UT39E型数字万用表测量频率用标准信号发生器输出正弦信号作为被测信号,用UT39E型数字万用表测量频率,按表3-3进行实验。
第1篇一、实验目的1. 了解系统频率特性的基本概念和测试方法。
2. 掌握使用示波器、频谱分析仪等设备进行系统频率测试的操作技巧。
3. 分析测试结果,确定系统的主要频率成分和频率响应特性。
二、实验原理系统频率特性是指系统对正弦输入信号的响应,通常用幅频特性(A(f))和相频特性(φ(f))来描述。
幅频特性表示系统输出信号幅度与输入信号幅度之比,相频特性表示系统输出信号相位与输入信号相位之差。
频率测试实验通常包括以下步骤:1. 使用正弦信号发生器产生正弦输入信号;2. 将输入信号输入被测系统,并测量输出信号;3. 使用示波器或频谱分析仪观察和分析输出信号的频率特性。
三、实验设备1. 正弦信号发生器2. 示波器3. 频谱分析仪4. 被测系统(如放大器、滤波器等)5. 连接线四、实验步骤1. 准备实验设备,将正弦信号发生器输出端与被测系统输入端相连;2. 打开正弦信号发生器,设置合适的频率和幅度;3. 使用示波器观察输入信号和输出信号的波形,确保信号正常传输;4. 使用频谱分析仪分析输出信号的频率特性,记录幅频特性和相频特性;5. 改变输入信号的频率,重复步骤4,得到一系列频率特性曲线;6. 分析频率特性曲线,确定系统的主要频率成分和频率响应特性。
五、实验结果与分析1. 幅频特性曲线:观察幅频特性曲线,可以发现系统存在一定频率范围内的增益峰值和谷值。
这些峰值和谷值可能对应系统中的谐振频率或截止频率。
通过分析峰值和谷值的位置,可以了解系统的带宽和选择性。
2. 相频特性曲线:观察相频特性曲线,可以发现系统在不同频率下存在相位滞后或超前。
相位滞后表示系统对输入信号的相位延迟,相位超前表示系统对输入信号的相位提前。
通过分析相位特性,可以了解系统的相位稳定性。
六、实验总结1. 通过本次实验,我们掌握了系统频率特性的基本概念和测试方法。
2. 使用示波器和频谱分析仪等设备,我们成功地分析了被测系统的频率特性。
3. 通过分析频率特性曲线,我们了解了系统的主要频率成分和频率响应特性。
电力系统频率测量误差成因分析内容预览电力系统频率测量误差成因分析肖遥,孟·让·柯洛德(1.湖北省电力试验研究院,湖北省430077;2.布鲁塞尔自由大学)摘要:系统频率是大家普遍关注的电能质量指标之一。
大量应用新技术对频率测量精度的要求也越来越高。
近年来用于精确测量频率的新方法也常见于报道,但这些方法几乎都在波形畸变上做文章。
文中通过理论分析和试验,揭示了引起频率测量偏差的主要原因是系统中的发电机出力、负荷和系统结构发生变化,导致被测电压信号初相角发生突变所致。
关键词:系统频率;频率测量;电能质量1引言电力系统频率是重要的电能质量指标之一。
对于系统频率监测和控制来讲,其测量误差达到10mHz应该说是基本满足要求的。
但是一些新技术在电力系统的应用中要求有精确的频率测量结果作为参考值。
测量系统频率的通常手段是通过检测电压波形的过零点,利用1个或几个周期过零点的时间间隔来推算出此段波形的频率。
然而,研究表明,在有信号干扰的情况下,用此方法测量的频率不很精确。
人们还发现,即便是在同一电网的不同位置,在同一时刻的频率测量结果也不一致。
经研究,发现波形畸变、暂态过程中的非周期分量、噪声干扰等是造成频率测量精度不高的原因,有人试图利用现代数学理论来提高频率测量精度[1~9]。
关于频率测量的诸多方法的介绍可以参考文献[10],本文不多述评。
这些频率测量算法的共同点是在波形上做文章,有的甚至将电压初相角恒定作为假设条件。
然而其最终结果却不尽如人意。
笔者通过实验和理论分析认为:导致系统频率测量精度差的主要原因是系统中的发电机出力、负荷波动以及系统结构发生变化,使电压信号的相位发生突变所致。
2系统频率的定义设有如式(1)的电压信号式中ω(t)/2π为系统频率f s。
当信号的基波相角和谐波相角稳定时,式(2)的频率就是系统的频率。
从式(2)还可以看出,该频率与信号的幅值没有任何联系,这从试验中也得到证明。
机动车测速雷达的误差分析与角度修正摘要:目前,雷达测速仪的测试精度仍然不够高,作用距离也有限,因此对于测速雷达的误差分析和角度修正有着现实的意义。
关键词:机动车;测速雷达;误差;修正Abstract: At present, radar speed measuring device still isn’t precise enough, and its operating distance is limited, so an error analysis and angular correction of speed measuring radar is of practical significance.Key words: motor vehicle; speed measuring radar; error; correction1.1 机动车测速雷达误差分析与改进交通雷达测速仪目前广泛应用于道路交通巡逻、车流速度检测等方面,特别是在交通管制方面起着重要的作用。
但是交通雷达测速仪普遍存在的测试精度不高,准确性较差,测量功能单一等不足,限制了其进一步的推广应用。
采取一些有效措施改善其性能,提高其测量精度并增加其测量功能具有重要的现实意义。
1.1.1 交通雷达测速仪误差构成目前应用的交通雷达测速仪普遍为连续波多谱勒体制,且工作于3厘米波段,其微波发射频率在GHz左右,采用圆极化形式发射,发射功率在几十毫瓦左右。
根据多谱勒效应,当发射波的波速遇到运动物体返回时,其回波有下面的关系成立:(1-1)式中:——反射信号的频率——微波源产生的发射频率——运动物体的径向速度分量从(1-1)式中可以看出,接收到的反射信号频率是由两项组成的。
第一项是由微波源产生的发射频率,第二项是由物体运动引起反射信号的多谱勒频移。
当运动物体驶近微波源时, 为正,当运动物体远离微波源时, 为负,C为电磁波在空间的传播速度,可将(1-1)式表示成如下形式:(1-2)将称为多谱勒频移又叫多谱勒频率,由(1-2)可求得:(1-3)由于C和是已知量,显然运动物体的径向速度与成正比,即测得就可求得目标运动物体的径向速度[1]。
声速测量技术的使用方法与误差分析声速是声波在介质中传播的速度,是声学研究中的重要参数之一。
准确测量声速对于很多领域都具有重要意义,如声纳、地震勘探、材料科学等。
本文将介绍一些常见的声速测量技术的使用方法以及可能存在的误差分析。
一、常见的声速测量技术1. 声速仪器测量法声速仪器测量法是一种直接测量声速的方法,常见的仪器有声音,超声波测速仪等。
该方法通过发射声波,测量声波在介质中传播的时间来计算声速。
2. 声射线测量法声射线测量法是一种间接测量声速的方法,常用于室外测量等场合。
该方法通过发射声波,测量声波的传播路径和时间来计算声速。
3. 频率法频率法是一种间接测量声速的方法,常用于室内实验等准确测量的场合。
该方法通过在介质中发射不同频率的声波,测量声波的传播时间来计算声速。
二、声速测量误差分析1. 温度误差声速与温度呈正相关关系,当测量介质的温度发生变化时,对声速的测量结果会产生一定的影响。
因此,在进行声速测量时,需要对介质的温度进行精确控制,并进行相应的温度补偿。
2. 湿度误差湿度对声波在某些介质中的传播速度也有一定的影响。
当测量介质中的湿度发生变化时,也会对声速的测量结果产生一定的影响。
因此,在进行声速测量时,需要控制好介质的湿度,并进行湿度补偿。
3. 压力误差声速与压力呈正相关关系,当测量介质的压力发生变化时,对声速的测量结果也会产生一定的影响。
因此,在进行声速测量时,需要控制好介质的压力,并进行压力补偿。
4. 测量误差测量仪器的精度和准确度会对声速测量结果产生影响。
测量过程中,仪器的误差、噪音、漂移等因素都会对结果产生一定的干扰。
因此,在进行声速测量时,需要选择合适的仪器,并进行仪器的校准和校正。
5. 技术误差声速测量方法的选择和操作技巧都会对测量结果产生一定影响。
不同的测量方法具有不同的优缺点,需要根据具体的测量要求选择合适的方法和技术,以减小误差。
三、声速测量技术的改进与应用随着科学技术的发展,声速测量技术也在不断改进和应用。

电子实验中的误差分析及对策辅相成,通过实验可使学生加深对所学理论知识的理解.在实验教学中,误差及其分析是主要的内容.测量误差是指用测量仪器进行测量时,所测出的示值与被测值的实际值(真值)之间的差值.误差并非都来自测量误差,在理论分析中也常常采用近似理论或工程估算,因而理论计算值本身就带有一定的误差.实验中的测量误差,根据误差的性质及其产生的原因,一般可分为三类:1.系统误差在规定的测试条件下对同一量进行多次测量时,如果误差的数值保持恒定或按某种确定规律变化,则称这种误差为系统误差.例如,电表零点不准,温度,湿度,电源电压等变化造成的误差,便属于系统误差.2.偶然误差(又称随机误差)在规定的测量条件下对同一量进行多次测量时,如果误差的数值发生不规则的变化,则称这种误差为偶然误差.例如.热骚动.外界干扰和测量人员感觉器官无规律的微小变化等引起的误差,便属于偶然误差.3.过失误差(又称粗大误差)’过失误差是指在一定的测量条件下,测量值显着地偏离真值时的误差.例如,读错刻度,记错数字,计算错误及测量方法不对等引起的误差.通过分析,确认是过失误差的测量数据应该予以剔除.因而对实验误差一定要认真分析,确定产生误差的主要原因是什么. 例如在分立元件(RC振荡电路)实验中,实验用李沙育图形法测得振荡电路的频率f=260HZ,而理论l值f=:=225,9HZ两者相差Af=34.IHZ.这一误差主要是由于:(1)f彘是个近似计算公式,而严密推得的计算公式为—赫,式中Ri为放大电路的输入电阻.(2)RC元件的标准值与实际值(真值)之间的差异.而学生们在分析时则认为是李沙育图形不稳定及分布电容,结电容的影响.其实波形稳或不稳至多产生几个赫兹的误差,在低频时,分布电容,结电容对电路影响极其微小.很明显,学生们分析的并不切合要点.又如在<运放参数测量)实验中,要测试运放的开环增益.本实验中用的运放为F007B,由手册查得F007B的直流开环增益Aod≥86分贝,而实际测量值Aod达不到86分贝.其误差:第一,手册中规定的值是许多器件测试的平均统计值;第二,测试条件与测试方法不一样,实验中是采用闭环测量方法,且用交(作者单位:南通职业大学电子系226007)65南通职业大学1999年流信号代替直流信号;第三,把器件看成理想运算放大器.在计算中应用了近似条件.学生们在进行误差分析时一般只提及到第三点.前二点则未加考虑.这主要由于学生对基本知识学得不活.另外对手册中额定值的概念不清.不会使用手册中的数据.搞清了产生误差的原因后.那么如何在实验中减少误差.提高实验数据的准确度呢?可以从下面几个方面着手:一,学生必须遵循实验操作规程实验是手脑并用.理论联系实际,并在理论指导下有所创新的实践过程.所以.学生实验前必须做好预习工作.弄懂实验原理中的有关理论知识.初步了解实验中所测的实验数据及其测试方法.掌握实验中用到的所有仪器的使用方法.1.使用前应阅读技术说明书或关于仪器使用方法的资料.切忌盲目乱用.2.接通电源前应先检查仪器的量程,功能,衰减,增益等旋钮及开关.是否有松脱及滑位错位等现象,然后将上述各旋钮置于需要的位置.通常应把仪器的”增益”,”输出”,”灵敏度”等旋钮置于最小部分.将”衰减”,”量程”等旋钮置于最高部位.3.仪器的预热和调零.电子测量仪器都要有足够的预热时间.工作性能才能稳定.在电子实验中.精度要求一般不高.通常预热1O一3O分钟即可满足要求.电子测量仪器调零的基本原则是:当无任何信号输入时.应调节仪器的读数刚好指零或某规定值.先机械调零.后电气调零.4.要特别注意安全操作.养成单手操作的习惯.弄懂了实验原理.测试方法及仪器的使用,方可进行实验.否则.匆忙进行实验达不到实验应有的效果.且易花费更多的时间.二,学生必须学会灵活用表万用表在电子实验中主要用于测量直流电压,直流电流,交流电压和电阻阻值.如何选择万用表的量程,直接影响测量误差的大小.如要测量8V的直流电压.一般可选择IOV档量程或50V档量程来测量.而两者的测量误差是不同的.如万用表的直流电压档的准确度等级为2.5级(S:2.5).用IOV档产生的最大示值相对误差为:V,n:±s%×r.=±2.5%×,-):±3.125%V o而50V档产生的最大示值相对误差为:V’n:±s%×):±2.5%×eu-)=±15.625%V o这二种测量结果在表头上反映为:第一种IOV档指针偏转角度较大,测量误差少.而第二种50V档指针偏转角度较小.测量误差大.因此.选择合适的量程可以减少实验中的测量误差.用指针式测量被测数据时.被测量的指示值应在仪表的满刻度量程的三分之二以上,这样可以减少测量误差.三,学生必须选择最佳的测试方法如在测某一放大器的输入电阻时.可用两种方法来测试.1.替代法:是用一个可变电阻替代被测放大器的输入电阻.如图一:第4期杨碧石:电子实验中的误差分析及对策V笮放大器Ril2Rs放大器lVslvIOR;l’圈一替代法圈二换算法放大器的输入电阻等效为,当开关置”a”时,测量l,2两端的电压为Vi;而开关K置”b”时,调节电位器Rw,使l,2两端的电压仍为Vi,则Rw的值就等于输入电阻值.2.换算法:是在放大器的输入回路中串入一只标准电阻来测试.如图二:在信号源与被测放大器前串接一个电阻Rs,用毫伏表分别测试Rs两端对地的电压Vs和Vi的值,则‘Ri=Vi×Rs在电子实验中通常采用较为方便的换算法来测试.换算法测试时,Rs 的选择与(输入电阻)用同一数量级.若Rs过大易引起干扰,过小则测量误差较大.再如要测试两级放大器的上,下限频率时,测试中,通常保持输入信号大小不变,用毫伏表(GB一9B型)或示波器(SR8型)监示放大器输出端信号变化情况,然而测出下限频率(几+/-IZ)和上限频率(大于500KI-IZ).测试下限频率时,应选用毫伏表,毫伏表测试的频率范围20HZ~2(DKHZ,如用示波器测下限频率,被测波形闪烁不停,不易读准.而测上限频率,若用毫伏表测试,因上限频率超出毫伏表的测试范围,将带来较大的误差,因而改用示波器测试,因为示波器的可测频率高达15MHZ.四.学生必须学会判断实验数据是否正确要能迅速判断实验数据是否正确,实验前学生必须所有实验数据的概况心中有数,并在实验前进行理论估算.这是评判实验数据正确与否的关键.如某学生测试放大器的电压放大倍数,实验前理论估算为Au=55,实验中在静态工作点正常时,加输入信号Vi=5my,测得输出信号为V o=80my,则Au=15,两者相差太大.经检查发现毫伏表量程旋钮错位,修复后重新测试V o=250a~,即Au=50,与理论估算基本相符.对于粗大误差这种测量值大大偏离实际值的测试数据应及时剔除,并找出问题所在,重新测试.学生做到以上几点,那么在实验中可减少测量误差,提高实验数据的准确度,使实验结果与理论分析更相符.所以,正确引导学生的实验很重要,通过实验可培养学生全面分析问题和解决问题的能力,使学生具备科技人员应有的严谨的科学态度和踏实细致的工作作风.参考文献:1郑家祥.电子测量实验.国防工业出版社,19852杨遇春.电子线路及微机实验.中国科学技术大学出版社,1992 3常健生.检测与转换技术.机械工业出版社(责任编辑:李业农)67。
差频相位法光速测量系统误差及精度分析李小萍【摘要】差频相位法光速测量系统只需较短的距离,就能快速、方便、较高精度地对光速进行测量,非常适合学生实验和演示实验.作为一个自主设计的实验系统,误差控制是一个不可回避的实际问题.从差频相位法测量光速的基本原理和测量过程出发,全面分析了该设计系统存在的各项主要误差,提出了控制误差的方法和措施,并对该系统的精度进行分析计算.为测量系统的设计、调试和测量方法的确定提供了较强的理论和实验指导.【期刊名称】《淮海工学院学报(自然科学版)》【年(卷),期】2011(020)003【总页数】4页(P19-22)【关键词】差频相位法;光速测量;误差;精度【作者】李小萍【作者单位】苏州卫生职业技术学院基础部,江苏苏州215009【正文语种】中文【中图分类】TH741差频相位法光速测量系统采用高稳定度、高频晶体振荡电路和高频锁相环路,将高频测量信号转化成高稳定的低频测量信号,较小的距离变化就能产生较大的相位变化,较短的距离就能获得较高精度的光速测量,同时由于采用可见半导体激光器作为光源和同轴结构光学系统,使得测量系统非常稳定,测量过程方便快捷,很适合在实验室用示波器做光速测量演示和学生实验。
本文系统地分析了差频相位法光速测量系统的误差,提出了控制误差的措施和提高测量精度的方法。
1 差频相位法测量光速原理如图1所示,调制频率为f的光波从A点出发,经过距离D到达B点后被反射回A点并被接收,其所用时间为t2D,调制波长为图1 相位法测量光速原理Fig.1 Principle of the light measurement system based on slip frequency phase method设在时刻t发射的调制光光强为式中:φ0为初始相位。
则接收端收到的调制光光强为接收端与发射端调制光的相位差为也可改写为式中:N为整波数,N=int(2D/λ),Δφ2D为不足整波部分的相位。