2-3 空间刚架问题的有限元法
- 格式:ppt
- 大小:515.50 KB
- 文档页数:17
第一章有限元法概述第一节有限元法的发展及基本思想随着现代工业、生产技术的发展,不断要求设计高质量、高水平的大型、复杂和精密的机械及工程结构。
为此目的,人们必须预先通过有效的计算手段,确切地预测即将诞生的机械和工程结构,在未来工作时所发生的应力、应变和位移。
但是传统的一些方法往往难以完成对工程实际问题的有效分析。
弹性力学的经典理论,由于求解偏微分方程边值问题的困难,只能解决结构形状和承受载荷较简单的问题,对于几何形状复杂、不规则边界、有裂缝或厚度突变,以及几何非线性、材料非线性等问题往往遇到很多麻烦,试图按经典的弹性力学方法获得解析解是十分困难的,甚至是不可能的。
因此,需要寻求一种简单而又精确的数值分析方法。
有限元法正是适应这种要求而产生和发展起来的一种十分有效的数值计算方法。
这个方法起源于20世纪50年代中期航空工程中飞机结构的矩阵分析。
1960年美国的克劳夫(C l o u g h)采用此方法进行飞机结构分析时,首次将这种方法起名为“有限单元法”(finite element method),简称“有限元法”。
有限单元法的基本思想,是在力学模型上将一个原来连续的物体离散成为有限个具有一定大小的单元,这些单元仅在有限个节点上相连接,并在节点上引进等效力以代替实际作用于单元上的外力。
对于每个单元,根据分块近似的思想,选择一种简单的函数来表示单元内位移的分布规律,并按弹性理论中的能量原理(或用变分原理)建立单元节点力和节点位移之间的关系。
最后,把所有单元的这种关系式集合起来,就得到一组以节点位移为未知量的代数方程组,解这些方程组就可以求出物体上有限个离散节点上的位移。
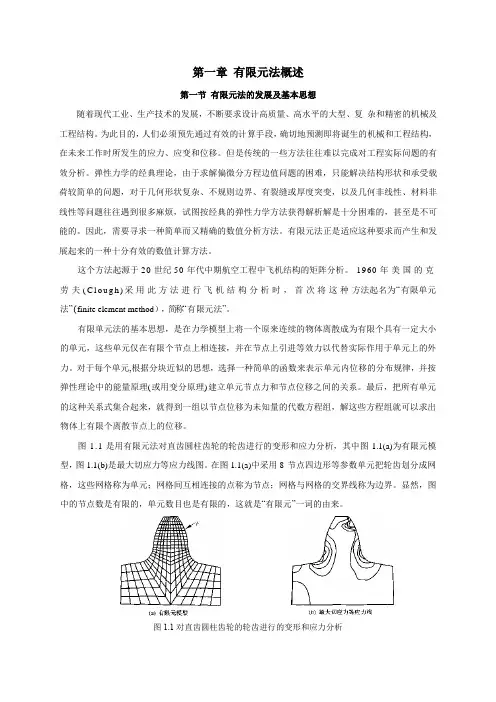
图1.1是用有限元法对直齿圆柱齿轮的轮齿进行的变形和应力分析,其中图1.1(a)为有限元模型,图1.1(b)是最大切应力等应力线图。
在图1.1(a)中采用8节点四边形等参数单元把轮齿划分成网格,这些网格称为单元;网格间互相连接的点称为节点;网格与网格的交界线称为边界。
有限元⽅法的发展及应⽤有限元⽅法的发展及应⽤摘要:有限元法是⼀种⾼效能、常⽤的计算⽅法。
有限元法在早期是以变分原理为基础发展起来的,所以它⼴泛地应⽤于以拉普拉斯⽅程和泊松⽅程所描述的各类物理场中。
⾃从1969年以来,某些学者在流体⼒学中应⽤加权余数法中的迦辽⾦法或最⼩⼆乘法等同样获得了有限元⽅程,因⽽有限元法可应⽤于以任何微分⽅程所描述的各类物理场中,⽽不再要求这类物理场和泛函的极值问题有所联系。
基本思想:由解给定的泊松⽅程化为求解泛函的极值问题。
1有限元法介绍1.1有限元法定义有限元法(FEA,Finite Element Analysis)的基本概念是⽤较简单的问题代替复杂问题后再求解。
它是起源于20世纪50年代末60年代初兴起的应⽤数学、现代⼒学及计算机科学相互渗透、综合利⽤的边缘科学。
有限元法的基本思想是将求解域看成是由许多称为有限元的⼩的互连⼦域组成,对每⼀单元假定⼀个合适的(较简单的)近似解,然后推导求解这个域总的满⾜条件(如结构的平衡条件),从⽽得到问题的解。
这个解不是准确解,⽽是近似解,因为实际问题被较简单的问题所代替。
由于⼤多数实际问题难以得到准确解,⽽有限元不仅计算精度⾼,⽽且能适应各种复杂形状,因⽽成为⾏之有效的⼯程分析⼿段。
有限元法最初应⽤在⼯程科学技术中,⽤于模拟并且解决⼯程⼒学、热学、电磁学等物理问题。
1.2有限元法优缺点有限元⽅法是⽬前解决科学和⼯程问题最有效的数值⽅法,与其它数值⽅法相⽐,它具有适⽤于任意⼏何形状和边界条件、材料和⼏何⾮线性问题、容易编程、成熟的⼤型商⽤软件较多等优点。
(1)概念浅显,容易掌握,可以在不同理论层⾯上建⽴起对有限元法的理解,既可以通过⾮常直观的物理解释来理解,也可以建⽴基于严格的数学理论分析。
(2)有很强的适⽤性,应⽤范围极其⼴泛。
它不仅能成功地处理线性弹性⼒学问题、费均质材料、各向异性材料、⾮线性应⽴-应变关系、⼤变形问题、动⼒学问题已及复杂⾮线性边界条件等问题,⽽且随着其基本理论和⽅法的逐步完善和改进,能成功地⽤来求解如热传导、流体⼒学、电磁场等领域的各类线性、⾮线性问题。

空间杆系有限元法的基本假定
《空间杆系有限元法的基本假定》
空间杆系有限元法是一种用于计算结构力学的数值分析方法,它的基本假定是:杆系中的杆件可以看作是线性的;杆件的材料是等参数的;杆件的结构是稳定的;力学系统是定常的;外力是稳定的;杆件的变形是均匀的;杆件的变形是有限的;杆件的变形是连续的;杆件的变形是可逆的。
空间杆系有限元法的基本假定是建立在结构力学的基本原理和结构力学的基本假设上的,这些假设可以简单地表述为:杆件的材料是等参数的;杆件的结构是稳定的;力学系统是定常的;外力是稳定的;杆件的变形是均匀的;杆件的变形是有限的;杆件的变形是连续的;杆件的变形是可逆的。
空间杆系有限元法的基本假定是建立在结构力学基本原理和结构力学基本假设之上的,它是一种比较可靠的结构力学分析方法,可以用来求解空间杆系的力学问题。
第二章 空间杆件结构的有限单元法 第一节 局部坐标系下的单元分析图2-1 所示为空间刚架中的仁一杆件单元。
选取局部坐标系时,去形心轴为x 轴,哼截面的主轴分别为坐标系的y 轴和z 轴。
x 、y 、z 轴的方向按右手定则确定。
这样,单元在x y 平面内的位移与x z 平面内的位移是彼此独立的。
设杆截面面积为A ,在x z 平面内的抗弯刚度为y EI ,线刚度lEI i y y =;在x y 平面内的抗弯刚度为x EI ,线刚度lEI i xx =;杆件的抗扭刚度为lGJ。
空间刚架单元的两端分别与结点I 和j 相联结。
每一个结点有六各界点位移分量和六个结点力分量。
在局部坐标系下空间杆件的杆端位移列阵eδ和杆端力列阵eF 分别为[]Tzj zjxj j j jziyi xi i i ie w v u w v u θθθθθθδ=[]Tzjyj xjjjjziyixiiiie M M M Z Y X M M M Z Y X F =其中u 为轴向位移,w v 、为横向位移,x θ为杆件的扭转角,z y θθ、分别为绕y 轴和z 轴弯曲时的转角;X 为杆件单元的轴力,Z Y 、分别为沿y 轴和z 轴作用的剪力,z y x M M M 、、为作用在杆端的力偶矩。
这里力偶矩和角位移的指向按照右手定则用双箭头表示;力和线位移的指向用单箭头表示。
图2-1中所示的杆端力和杆端位移为正方向。
与平面单元的推导方法一样,首先求出当杆端位移eδ中的一个分量为1,而其余分量均为零时的杆端力。
图2-2所示为当单元○e 的i 端发生单位位移时,杆端力与杆端位移之间的关系。
图中未绘出的杆端力和杆端位移分量,在该情况下数值为零。
图2-1依同样方法可以确定当单元j 端发生单位位移时,杆端力与杆端位移之间的关系。
当单元的杆端位移分量为任意值时,可以写出空间单元刚度方程,以矩阵表示为⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----------------=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡zj yj xj j j j zi yi xi i i i z z z z y y y y y y y y z z z z z z z z y y y y y y y y z z z z zj yj xj j j j zi yi xi i i i w v u w v u l EI l EI lEI l EI l EI l EI l EI l EI l GJ l GJ l EI l EI l EI l EI l EI l EI l EI l EI l EA l EAl EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJl EI l EI l EI l EI l EI l EI l EI l EI l EA lEAM M M Y X M M Z Y X θθθθθθ 40602060040600020600000000000006012000601200600012060001200000000000200060400060020600040600000000000006012000601200600012060001200000000000222223232323222223232323(2-1)式(2-1)可以简写为e e e k F δ= (2-2)其中单元刚度矩阵为⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----------------=l EI l EI lEI l EI l EI l EI l EI l EI l GJ l GJ l EI l EI l EI l EI l EI lEI l EI l EI l EA l EAl EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJl EI l EI l EI l EI l EI l EI l EI l EI l EA lEAk z z z z y y y y y y y y z z z z z z z z y y y y y y y y z z z z e 40602060040600020600000000000006012000601200600012060001200000000000200060400060020600040600000000000006012000601200600012060001200000000000222223232323222223232323 (2-3)式(2-3)为局部坐标系中的空间单元刚度矩阵。