空间问题的有限元方法总结计划.docx
- 格式:docx
- 大小:34.22 KB
- 文档页数:7
有限空间布置重点工作总结
在现代社会,我们常常面临有限的空间,需要将重点工作进行合理布置。
在这
篇文章中,我们将探讨如何在有限的空间内有效地布置重点工作,以提高工作效率和生产力。
首先,要对重点工作进行明确的界定。
在有限的空间内,我们不可能同时进行
所有的工作,因此需要确定哪些工作是最重要的,最需要优先处理的。
这样可以确保我们在有限的空间内集中精力进行最重要的工作,提高工作效率。
其次,要充分利用空间资源。
在有限的空间内,我们需要充分利用各种资源,
包括桌面空间、文件柜、墙壁等,将工作进行合理布置。
可以使用文件夹、文件盒等工具,将文件整理归档,避免杂乱无章,提高工作效率。
另外,要合理安排工作时间。
在有限的空间内,我们需要合理安排工作时间,
将重点工作集中在最有效的时间段内进行。
这样可以确保我们在有限的空间内充分发挥工作效率,提高生产力。
最后,要保持空间整洁。
在有限的空间内,保持整洁是非常重要的。
整洁的工
作环境可以提高工作效率,减少工作中的混乱和压力,使我们更加专注于重点工作。
总之,在有限的空间内布置重点工作需要我们明确工作重点、充分利用空间资源、合理安排工作时间和保持空间整洁。
只有这样,我们才能在有限的空间内提高工作效率,提高生产力。

小组总结报告本次作业的任务是要求用有限元的计算机算法对一个实例进行计算来熟练掌握机算的方法。
方法并验证机算的精确程度和分析如何提高机算的精确性。
通过机算得要每个有限单元的应力,通过不同的方法进行应力整理,在结构上取几个点通过弹性力学的精确解答得到这些点的精确解,然后把计算机算得的单元应力进行整理得到点的应力大小,然后把弹性力学的精确解和机算的应力进行比较,得到误差,验证精确性,并通过不同个数单元的应力精确性进行分析,如何提高有限元算法的精确性。
小组商量选择简支梁为模型进行有限元的分析,选择了一个6m,高1m,厚度0.1m的简支梁模型,梁的上部受10牛每平方米的均布力作用,小组成员5人都采用了三角形单元法进行有限元单元网络的分解,分别选取40, 60,80,100,120个单元的网络,各自进行单元和节点的编号。
编写输出数据,运行C语言程序分析得到各点的应力和个单元的应力,并记录。
在梁上选取几个点通过弹性力学的公式计算得到精确解,在通过有限单元法对单元应力进行整理得到此点的应力,比较误差,分析误差。
通过小组的分析和商讨看出误差的一定规律,并找到如何减小误差从而提高精度的方法。
通过误差的分析可以看出50个单元的应力误差很大,较100,120个单元的结构误差大了很多,所以可以看出,单元越少,应力的误差比较大。
在单元相同个数的结构中,可以看出,应力大的点,应力的误差大,应力小的点,误差较小,所以可以看出应力大的地方误差较为集中,应该进行单元的密分,进而减少误差。
当然进行了误差分析之后,也找到了提高精度的方法,其就是减少误差。
通常可以通过网格的细分,使每个单元的面积缩小,那么尽管每个单元是应变、常应力单元,仍可较好地反映结构中的应力变化,使得到的解答收敛于问题的精确解;还可以根据应力梯度使网格的布局合理化。
即在梯度大的区域网格密些,梯度小的区域应稀些,密、稀网格之间应逐步过渡。
在小组进行任务完成的工作中,遇到了各种各样的问题,例如怎么样进行输入数据源的编写,C语言程序的使用,应力的整理和分析,在这些工作中都遇到了难题,但是在小组成员共同努力下,齐心协力的克服了各种各样的难题,最终完成了有限单元法计算机求解的任务,在此过程中更加深刻得理解了有限元的方法,学会了用有限元计算机来求解一些复杂的实际问题。
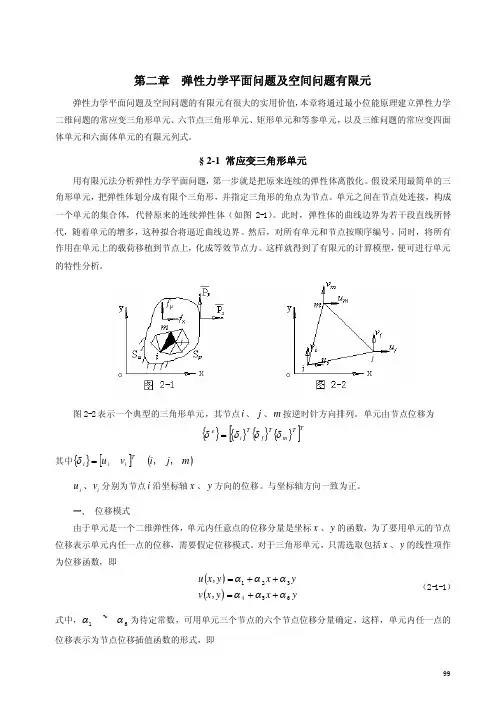
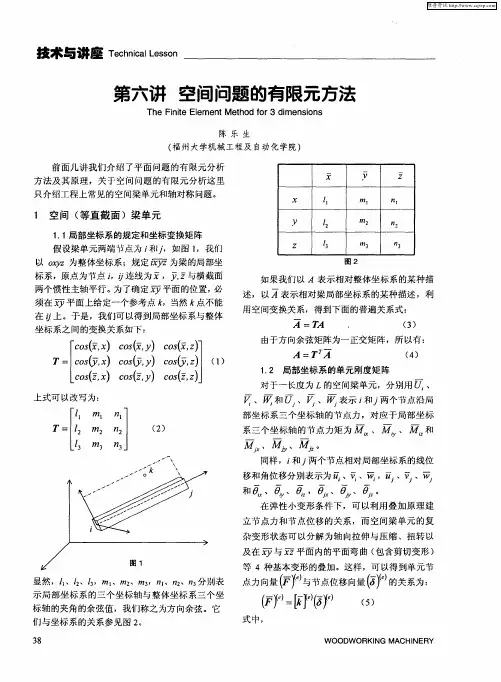
第三章 空间问题的有限元方法引言许多工程实际问题,属于空间问题,由于结构形状或受力的复杂性,用经典弹性理论去求解它们的解析解是不可能的。
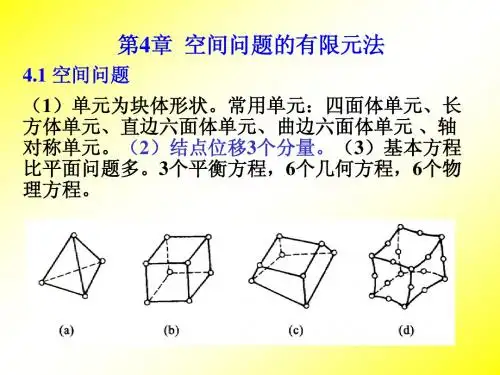
而有限元法处理此类问题, 原则上不存在什么困难,本章将介绍一般空间问题的四面体单元。
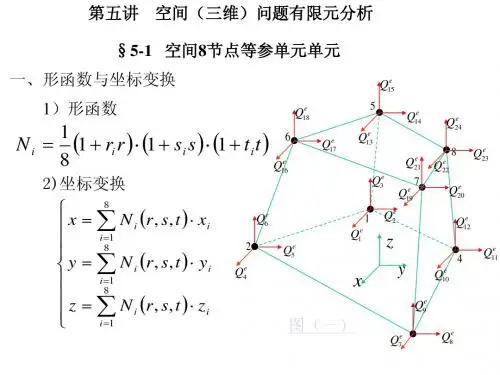
一般空间问题的有限元列式3.2.1 单元位移模式及插值函数空间问题中,每个单元有四个结点,编码为i,j,m,p。
每个结点有3 个位移分量。
每个结点的位移可用位移矢量i 表示,即u iiv i(i , j ,m, p)w i单元结点的位移向量可表示为ieju i v iw i u j v j w ju m v m w m u pv pw pTmpe为单元结点位移列阵。
假设单元内的位移模式选取一次多项式u 1 2x3y4zv56 x7 y8 z(3.2.1 )w910x11y12z由于四个结点也在单元内,满足位移模式,于是得u i 12xi 3yi 4ziu j 1 2xj 3yj 4zj( 3.2.2 )u m12 xm 3 ym4 zmu p12xp 3yp 4zp上式是关于1 ,2, 3,4 的线性方程组。
1, 2 , 3, 4 是待定常数,也称为广义坐标。
它可由( 3.2.2 )式求出。
上式的系数行列式是1x i y i z i1x j y j z j2V(3.2.3 )Dx m y m z m11x p y p z p上式中当 i,j,m,p 的编号顺序满足右手法则, V值为正,其大小为四面体体积,因此为了方便单元的编号一般满足右手法则。
求得1 , 2 , 3 , 4后,回代入位移模式得u N i u i N j u j N m u m N p u p(3.2.4)式中N i1(a i b i x c i y d i z)(i , j, m, p) (3.2.5) 6Vx j y j z ja i x m y m z mx p y p z p1y j z jb i1y m z m1y p z p1x j z jc i 1x m z m(i , j , m, p) (3.2.6)1x p z p1x j y jd i1x m y m1x p y p上式下标 (i ,j , m, p) 轮换,可得 a j , b j ,c j , d j, a m ,b m ,c m , d m及 a p , b p , c p ,d p。
同理 , 也可得到其它两式 , 于是得u N i u i N j u j N m u m N p u pv N i v i N j v j N m v m N p v p( 3.2.7)w N i w i N j w j N m w m N p w p 其中N i1(a i b i x c i y d i z)(i , j, m, p) (3.2.8) 6VN i , N j , N m , N p称为单元的插值函数或形函数,这里它是x, y, z的一次函数,其中a i ,b i , c i ,d i, a j , b j , c j , d j, a m ,b m , c m , d m及 a p , b p , c p ,d p是常数,由表达式可知,它完全由单元的大小和方位确定,一旦单元确定了,这些常数也完全确定。
( 3.2.7 )式的矩阵形式是u N i00N j00N m00N p0i 0u v0N i00N j00N m00N pj 0w00N i00N j00N m00m N ppiIN i IN j IN m IN p jmp[ N ] i[ N ] j[ N ] m[ N ] p e N e(3.2.9 )N称为插值函数矩阵或形函数矩阵。
3.2.2 .应变矩阵和应力矩阵⑴应变确定了单元位移后,可以很方便地利用几何方程和物理方程求得单元的应变和应力。
在( 1.4.21 )式的几何方程中,位移用()式代入,得到单元应变为x y z xy yz zxuxvywzu v y x v w z y w u x z[ B] i[ B] j[ B] m[ B] p e B e(3.2.10 )B称为应变矩阵。
应变矩阵的分块矩阵 [ B]i是b i000c i0100 d i(i , j , m, p)(3.2.11 )[ B] ic i b i06V0d i c id i0b i可以看出,应变矩阵 B 中的元素都是常量,从而单元中的应变都是常量,所以三维线性位移模式的四面体单元是常应变单元。
⑵ 应力单元应力可以根据物理方程求得,其应力应变关系如下:x 1 [x( Ey1 [y( Ez1 [z(Eyz yz /zx zx/xy xy /y z )]z x )]x y )]或Ex ,Ex12yz yz12(1)Ey ,Ey12zx zx12(1)Ez ,Ez12xy xy12(1)于是应力向量可表示为D DB e S e(3.2.12 )式中 D 为弹性矩阵,而111111E(1)1111 2D2)00(1 )(12(1)00120 2(1)12 0)2(1(3.2.13 )从而可以到,三大物理参量,都可以用单元结点位移向量表示:u N eTB ex y z xy yz zxTe S ex y z xy yz zx DB由于 N,B,S 都是已知的矩阵,只要求得 e ,则单元内的位移、应变和应力就可以就得,问题是:如何求结点位移向量3.单元刚度矩阵和结点载荷向量对于三维单元,单元刚度矩阵也具有上章所讨论的单元刚度矩阵的一般形式,即KeV e B TDBtdxdyB TDBV( 3.2.15 )写成分块矩阵的形式K ii e K ij e K im e K ip eK eK e jiK jj e K e jm K e jp(3.2.16 )K mi eK mjeK mmeK mp eK pi e K pj e K pm e K pp e每个子矩阵为K rs e [ B r ] T D[ B s ]V等效结点载荷P f eN T fdVV eP S eeN T TdSSP e P f e P S e(3.2.17 )P e 是单元等效结点载荷(体力和面力引起的等效结点力) , F e 是其他单元对该单元的作用力,则单元结点力为P e 与 F e 和。
体积力的等效结点载荷:P if ef xP f eP jf e VeN T f y dxdydzP mf ef zP ix ef xP if eP iy eV eNif y dxdydz (i, j , m, p)P iz e ff z面积力的等效结点载荷:P S eeN T TdSSPeTixP S eP jeSeN TT y dSP m eT zSP ix e T xP iS eP iy e N i T y dSP iz eST zS这里给出两种常见的载荷的等效结点力:ⅰ)均质单元的自重分配到四个结点的等效结点力,其数值都等于 gV / 4 ;ⅱ)设单元的某一边界面上,例如ijm ,受有线性分布载荷,它在i, j , m 三个结点处的强度分别为 q i , q j , q m ,则分配到结点 i 上的等效结点力的数值为P i e1 q i1q j1q m A ijm(i , j, m)62 2A ijm 为受力面三角形面积。
方向与原方向平行。
3.2.4 .结构刚度矩阵和结构载荷列阵的集成由单元分析可得有限元列式为K eeP e F e( 3.2.18 )经叠加,组合,得有限元方程KP其中N eKK ee 1N EPP ee 1式中K e 为扩大后的单元刚度矩阵;P e 为扩大后的单元等效结点载荷;N e 为结构系统的单元数。