应变式传感器的温度误差及补偿方法
- 格式:pdf
- 大小:182.22 KB
- 文档页数:2
应变片测量温度补偿在工业生产和科学研究中,温度是一个非常重要的物理量。
准确地测量温度对于保证产品质量、实现工艺优化以及科学研究的准确性至关重要。
然而,由于环境和材料等因素的影响,传统的温度测量方法往往存在一定的误差。
为了减小这些误差,科学家们设计出了应变片测量温度补偿的方法。
应变片是一种能够感知物体形变的传感器,它可以通过测量物体的应变来间接地推断出温度。
应变片的原理非常简单,它利用了材料在受力下发生形变的特性。
当物体受到外力作用时,它会发生形变,而应变片可以感知到这种形变,并将其转化为电信号输出。
通过对应变片输出的电信号进行分析,我们就可以获得物体的应变情况,从而推断出物体的温度。
然而,应变片的测量结果并不总是准确的。
这是因为应变片的输出信号不仅受到温度的影响,还受到其他因素的干扰。
为了排除这些干扰因素对温度测量结果的影响,科学家们引入了温度补偿的概念。
温度补偿是一种通过测量其他参量来消除应变片输出信号中温度引起的误差的方法。
具体而言,科学家们通过同时测量物体的温度和其他参量(如应变、压力等),并建立起它们之间的数学模型。
通过分析这个数学模型,我们可以根据其他参量的测量结果来推断出物体的温度,从而实现温度补偿。
温度补偿的关键在于建立准确的数学模型。
这个数学模型需要考虑到应变片的特性、物体的材料参数以及其他参量的影响。
科学家们通过大量的实验和理论分析,不断改进和完善数学模型,以提高温度补偿的准确性和可靠性。
温度补偿在工业生产和科学研究中有着广泛的应用。
例如,在汽车制造中,应变片测量温度补偿可以用于发动机的温度监测,从而实现对发动机工作状态的准确控制。
在航天器的设计中,应变片测量温度补偿可以用于航天器表面温度的实时监测,以保证航天器的安全运行。
在材料科学研究中,应变片测量温度补偿可以用于材料的热膨胀系数的测量,从而帮助科学家们理解材料的热力学性质。
应变片测量温度补偿是一种有效提高温度测量准确性的方法。

电阻应变式传感器的温度误差及其补偿
一、温度误差及其产生的原因
1.温度变化引起应变片敏感栅电阻变化而产生附加应变
2.试件材料与敏感栅材料的线膨胀系数不同,使应变片产生附加应变
二、温度补偿方法
1.桥路补偿法
结构:补偿应变片粘贴于补偿块上(与试件相同的材料),补偿块不受应力。
电路:测量片与补偿片构成半桥(全桥)差动电路。
原理:温度变化引起的应变片电阻变化为相同方向,通过电桥消除影响。
2.应变片自补偿法
方法一
结构:特殊材料构成应变片。
原理:使温度与线膨胀产生的附加应变相互抵消或减小。
条件:
缺点:局限性大。
一种应变片只能用于一种试件材料。
方法二
结构:用两种不同材料构成应变片。
原理:两种不同材料的温度系数不同,选择适当的材料,使电阻变化减小或消除。
条件:。
第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥B.直流不平衡电桥C.交流平衡电桥D.交流不平衡电桥4、通常用应变式传感器测量( )。
A. 温度B.密度C.加速度D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化B.导电材料几何尺寸的变化C.导电材料物理性质的变化D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法B.补偿块粘贴补偿应变片电桥补偿法C.补偿线圈补偿法D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜B.铂C.康铜D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源B.低通滤波器C.差动放大器D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥 B.直流不平衡电桥C.交流平衡电桥 D.交流不平衡电桥4、通常用应变式传感器测量( )。
A. 温度 B.密度C.加速度 D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化 B.导电材料几何尺寸的变化C.导电材料物理性质的变化 D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数 B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同 D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法 B.补偿块粘贴补偿应变片电桥补偿法C.补偿线圈补偿法 D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜 B.铂 C.康铜 D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源 B.低通滤波器C.差动放大器 D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
第一章1.传感器的基本概念是什么?一般情况下由哪几部分组成?答:(1)传感器是能够感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
(2)传感器通常由敏感元件、转换元件和测量电路组成,有的还需辅助电源。
2.传感器有几种分类形式,各种分类之间有什么不同?答:一般常用的分类方法有四种:①按测量原理分类;②按输入信号分类;③按结构型和物理型分类;④按使用材料分类。
第二章1.何谓传感器的静态特性,传感器的主要静态特性有哪些?答:(1)传感器的静态特性是指在被测量的各个值处于稳定状态时,输出量和输入量之间的关系。
(2)主要的性能指标主要有线性度、灵敏度、迟滞、重复性、精度、分辨率、漂移。
2.何谓传感器的动态特性,怎样衡量传感器的动态特性?答:(1)传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即输出对随时间变化的输入量的响应特性。
(2)传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来衡量。
瞬态响应常采用阶跃信号作为输入,频率响应常采用正弦函数作为输入。
第三章1.试分析电位器式传感器的负载特性,什么是负载误差?如何减小负载误差?答:(1)电位器输出端有负载时,其特性称为负载特性。
负载电阻和电位器的比值为有限值,负载特性偏离理想空载特性的偏差称为电位器的负载误差。
对于线性电位器,负载误差即为其非线性误差。
(2)减小负载误差方法:①尽量减小负载系数,通常希望m<0.1,为此可采用高输入阻抗放大器;②将电位器工作区间限制在负载误差曲线范围内;③将电位器空载特性设计成某种上凸特性,负载特性必然下降。
第四章1.简述电阻应变式传感器的温度误差原因,如何补偿。
答:(1)原因:①温度变化引起敏感栅金属丝电阻变化;②试件材料与敏感栅材料的线膨胀系数不同,两者随温度变化产生的形变不等,使应变片产生附加应变。
(2)补偿方法:①电桥补偿法;②辅助测温元件微型计算机补偿法;③应变计自补偿2.什么是直流电桥?若按桥臂工作方式分类,可分为哪几种?各自的输出电压如何计算?答:(1)桥臂的供电电源是直流电的称为直流电桥。
第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥B.直流不平衡电桥C.交流平衡电桥D.交流不平衡电桥、4、通常用应变式传感器测量( )。
A. 温度B.密度C.加速度D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化B.导电材料几何尺寸的变化C.导电材料物理性质的变化D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法B.补偿块粘贴补偿应变片电桥补偿法$C.补偿线圈补偿法D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜B.铂C.康铜D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片·D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源B.低通滤波器C.差动放大器D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
应变片温度误差的概念产生原因及补偿方法
应变片温度误差指的是由于应变片与被测物体的温度不一致而引起的测量误差。
通常情况下,应变片的灵敏度会随着温度的变化而发生变化,从而导致测量误差的发生。
应变片温度误差产生原因主要有以下几点:
1. 应变片与被测物体温度不一致。
由于被测物体的温度不是恒定的,因此应变片与物体的温度也会发生变化,从而引起测量误差。
2. 应变片材料的温度系数不同。
不同的材料在温度变化时,其应变系数也会发生变化,从而影响应变片的灵敏度。
3. 应变片与电缆的温度不一致。
由于应变片和电缆连接处的温度不一致,其电阻值也会发生变化,从而影响测量精度。
针对应变片温度误差,可以采取以下补偿方法:
1. 温度补偿法。
该方法是通过测量应变片和被测物体的温度,计算出应变片的灵敏度变化,从而进行温度误差的补偿。
2. 电桥平衡法。
该方法是通过调节电桥电阻,使电桥相互平衡,从而消除温度
误差。
3. 自动温度补偿技术。
该技术是将温度传感器集成到应变片中,通过对温度进行实时监测和补偿加以消除温度误差。
以上方法可以有效地解决应变片温度误差的问题,从而提高测量的精度和准确性。
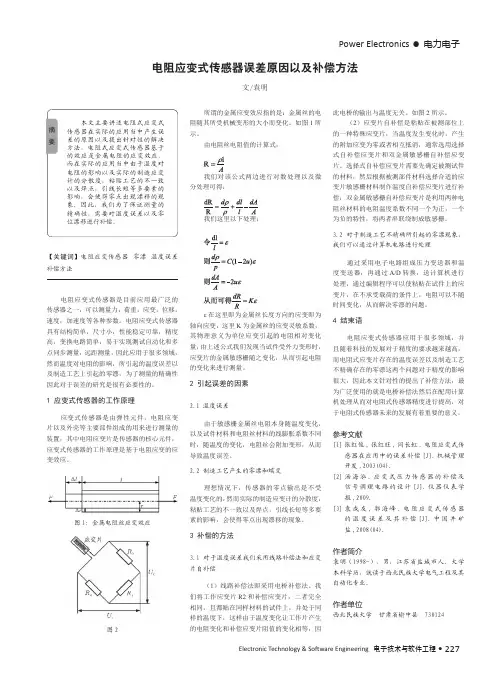
应变式传感器的温度误差及补偿方法作者:张宁来源:《价值工程》2012年第04期摘要:分析了应变式传感器在实际应用中由于环境温度变化等因素的影响产生的附加误差,给出了几种温度误差的补偿方法,以提高测量的准确性。
关键词:应变式传感器;温度误差;补偿中图分类号:TS3 文献标识码:A文章编号:1006-4311(2012)04-0011-020引言应变式传感器以电阻应变片为转换元件,应变片粘贴在被测试件表面,由于被测试件的变形使其表面产生应变,从而引起电阻应变片的阻值变化,通过测量电阻的变化即反映了应变或应力的大小。
电阻应变片不仅能够测量应变,而且对其他的物理量,只要能变为应变的相应变化,都可进行测量,如可以测量力、压力、位移、力矩、重量、温度和加速度等物理量。
它结构简单、体积小、测量范围广、频率响应特性好、适合动态和静态测量、使用寿命长、性能稳定可靠,是目前应用最广泛的传感器之一[1-3]。
电阻应变片由于温度变化引起的电阻变化与试件应变所产生的电阻变化几乎有相同的数量级,如果不采取必要的措施克服温度的影响,测量的精度无法保证。
1温度误差产生的原因1.1 电阻温度系数的影响应变片敏感栅的电阻丝阻值随温度变化的关系可用下式表示:Rt=R0(1+?琢0)?驻t(1)式中:Rt——温度为t时的电阻值;R0——温度为t0时的电阻值;?琢0——温度为t0时金属丝的电阻温度系数;Δt——温度变化值,Δt=t-t0。
当温度变化Δt时,电阻丝电阻的变化值为:ΔR=Rt-R0=R0?琢0Δt(2)1.2 试件材料和电阻丝材料的线膨胀系数的影响当试件与电阻丝材料的线膨胀系数相同时,不论环境温度如何变化,电阻丝的变形仍和自由状态一样,不会产生附加变形。
当试件与电阻丝材料的线膨胀系数不同时,由于环境温度的变化,电阻丝会产生附加变形,从而产生附加电阻变化。
设电阻丝和试件在温度为0℃时的长度均为l0,它们的线膨胀系数分别为βs和βg,若两者不粘贴,则它们的长度分别为ls=l0(1+βsΔt),lg=l0(1+βgΔt)(3)当两者粘贴在一起时,电阻丝产生的附加变形Δl、附加应变εβ和附加电阻变化ΔRβ分别为Δl=lg-ls=(βg-βs)l0Δt(4)εβ=■=(βg-βs)Δt,ΔRt=K0R0εβ=K0R0(βg-βs)Δt(5)那么由于温度变化而引起的应变片总电阻相对变化量为■=■=[?琢0+K0(βg-βs)]Δt(6)折合成附加应变量或虚假的应εt,有εt=■=■+(βg-βs)Δt (7)由式(6)和式(7)可知,因环境温度变化而引起的附加电阻的相对变化量,除了与环境温度有关外,还与应变片自身的性能参数(K0,?琢0,βs)以及被测试件线膨胀系数βg有关。
1、什么是传感器的静态特性?它有哪些性能指标? 如何用公式表征这些性能指标?2、什么是传感器的动态特性? 其分析方法有哪几种?3、什么是传感器的静特性?主要指标有哪些?有何实际意义?4、什么是传感器的基本特性?传感器的基本特性主要包括哪两大类?解释其定义并分别列出描述这两大特性的主要指标。
(要求每种特性至少列出2种常用指标)1、 答:传感器的静态特性是它在稳态信号作用下的输入-输出关系。
静态特性所描述的传感器的输入、输出关系式中不含有时间变量。
传感器的静态特性的性能指标主要有: ① 线性度:非线性误差maxL FSL 100%Y γ∆=±⨯ ② 灵敏度:yn xd S=d③ 迟滞:max HFSH 100%Y γ∆=⨯ ④ 重复性:maxRFSR 100%Y γ∆=±⨯⑤ 漂移:传感器在输入量不变的情况下,输出量随时间变化的现象。
2、答:传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性。
传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来分析。
知识点:传感器的动态特性 3、答:传感器的静态特性是当其输入量为常数或变化极慢时,传感器的输入输出特性,其主要指标有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。
传感器的静特性由静特性曲线反映出来,静特性曲线由实际测绘中获得。
通常人们根据传感器的静特性来选择合适的传感器。
知识点:传感器的静态特性 4、答:传感器的基本特性是指传感器的输入-输出关系特性。
传感器的基本特性主要包括静态特性和动态特性。
其中,静态特性是指传感器在稳态信号作用下的输入-输出关系,描述指标有:线性度(非线性误差)、灵敏度、迟滞、重复性和漂移;动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性,主要描述指标有:时间常数、延迟时间、上升时间、峰值时间、响应时间、超调量、幅频特性和相频特性。
Value Engineering 0引言应变式传感器以电阻应变片为转换元件,应变片粘贴在被测试件表面,由于被测试件的变形使其表面产生应变,从而引起电阻应变片的阻值变化,通过测量电阻的变化即反映了应变或应力的大小。
电阻应变片不仅能够测量应变,而且对其他的物理量,只要能变为应变的相应变化,都可进行测量,如可以测量力、压力、位移、力矩、重量、温度和加速度等物理量。
它结构简单、体积小、测量范围广、频率响应特性好、适合动态和静态测量、使用寿命长、性能稳定可靠,是目前应用最广泛的传感器之一[1-3]。
电阻应变片由于温度变化引起的电阻变化与试件应变所产生的电阻变化几乎有相同的数量级,如果不采取必要的措施克服温度的影响,测量的精度无法保证。
1温度误差产生的原因1.1电阻温度系数的影响应变片敏感栅的电阻丝阻值随温度变化的关系可用下式表示:R t =R 0(1+α0)Δt (1)式中:R t ———温度为t 时的电阻值;R 0———温度为t 0时的电阻值;α0———温度为t 0时金属丝的电阻温度系数;Δt ———温度变化值,Δt=t-t 0。
当温度变化Δt 时,电阻丝电阻的变化值为:ΔR=R t -R 0=R 0α0Δt (2)1.2试件材料和电阻丝材料的线膨胀系数的影响当试件与电阻丝材料的线膨胀系数相同时,不论环境温度如何变化,电阻丝的变形仍和自由状态一样,不会产生附加变形。
当试件与电阻丝材料的线膨胀系数不同时,由于环境温度的变化,电阻丝会产生附加变形,从而产生附加电阻变化。
设电阻丝和试件在温度为0℃时的长度均为l 0,它们的线膨胀系数分别为βs 和βg ,若两者不粘贴,则它们的长度分别为l s =l 0(1+βs Δt ),l g =l 0(1+βg Δt )(3)当两者粘贴在一起时,电阻丝产生的附加变形Δl 、附加应变εβ和附加电阻变化ΔR β分别为Δl =l g -l s =(βg -βs )l 0Δt(4)εβ=Δl 0=(βg -βs )Δt ,ΔR t =K 0R 0εβ=K 0R 0(βg -βs )Δt (5)那么由于温度变化而引起的应变片总电阻相对变化量为ΔR t 0=ΔR α+ΔR β0=[α0+K 0(βg -βs )]Δt (6)折合成附加应变量或虚假的应εt ,有εt =ΔR tR 00=αK 0+(βg -βs")Δt (7)由式(6)和式(7)可知,因环境温度变化而引起的附加电阻的相对变化量,除了与环境温度有关外,还与应变片自身的性能参数(K 0,α0,βs )以及被测试件线膨胀系数βg 有关。
温度对应变特性的影响,除了上述两个方面,还将会影响粘合剂传递变形的能力等。
但在常温下,上述两个方面是造成应变片温度误差的主要原因。
2温度补偿方法温度补偿方法通常有线路补偿和应变片自补偿两大类。
2.1线路补偿法电桥补偿是最常用且效果较好的线路补偿。
图1是电桥补偿法的原理图。
电桥输出电压U o 与桥臂参数的关系为:U o =A (R 1R 4-R B R 3)(8)式中,A 为由桥臂电阻和电源电压决定的常数。
由上式可知,当R 3和R 4为常数时,R 1和R B 对电桥输出电压U o 的作用方向相反。
利用这一基本关系可实现对温度的补偿。
测量应变时,工作应变片R 1粘贴在被测试件表面上,补偿应变片R B 粘贴在与被测试件材料完全相同的补偿块上,且仅工作应变片承受应变,如图2所示。
当被测试件不承受应变时,R 1和R B 又处于同一环境温度为t的温度场中,调整电桥参数使之达到平衡,此时有U o =A (R 1R 4-R B R 3)=0(9)工程上,一般按R 1=R B =R 3=R 4选取桥臂电阻。
当温度升高或降低Δt=t-t 0时,两个应变片因温度而引起的电阻变化量相等,电桥仍处于平衡状态,即U o =A[(R 1+ΔR 1t )R 4-(R B +ΔR Bt )R 3]=0(10)若此时被测试件有应变ε的作用,则工作应变片电阻R 1又有新的增量ΔR 1=R 1K ε,而补偿片因不承受应变,故不产生新的增量,此时电桥输出电压为U o =AR 1R 4K ε(11)由上式可知,电桥的输出电压U o 仅与被测试件的应变ε有关,而与环境温度无关。
线路补偿法的优点是简单方便,补偿效果好。
其缺点是在温度变化梯度较大的情况下,很难做到工作片与补偿片处于温度完全一致的情况,因而影响补偿效果。
2.2应变片的自补偿法这种温度补偿法是利用自身具有温度补偿作用的应变片(称之为温度自补偿应变片)来补偿的。
根据温度自补偿应变片的工作原理,可由式(7)得出,要实现温度自补偿,必须有:α0=-K 0(βg -βs)(12)———————————————————————基金项目:国家自然科学基金项目(60572001),河南省教育厅项目(2008B510019)和河南科技厅项目(112300410285)。
作者简介:张宁(1974-),女,河南开封人,硕士,讲师,研究方向为电子信息工程,检测技术等。
应变式传感器的温度误差及补偿方法Temperature Error and Compensation of Strain Sensor张宁Zhang Ning(商丘师范学院物理与电气信息学院,商丘476000)(Department of Physics and Electrical Information ,Shangqiu Normal University ,Shangqiu 476000,China )摘要:分析了应变式传感器在实际应用中由于环境温度变化等因素的影响产生的附加误差,给出了几种温度误差的补偿方法,以提高测量的准确性。
Abstract:This paper systematically analyzes the additional error of resistor sensor in the actual application influenced by the factors such as the ambient temperature.In order to solve this problem,this paper puts forward several methods of temperature compensation to increase the measuring precision to ensure accuracy.关键词:应变式传感器;温度误差;补偿Key words:resistor strain sensor ;temperature error ;compensation中图分类号:TS3文献标识码:A文章编号:1006-4311(2012)04-0011-02·11·价值工程年份就业人数L 就业人数增长率l 年份就业人数L 就业人数增长率l 1995199619971998199920006806568950698207063771394720850.90%1.30%1.26%1.17%1.07%0.97%2002200320042005200620072008737407443275200758257640076990774800.98%0.94%1.03%0.83%0.76%0.77%0.64%表2我国的劳动投入(单位:万人)上式表明,当被测试件的线膨胀系数βg 已知时,如果合理选择敏感栅材料,即其电阻温度系数α0、灵敏系数K 0以及线膨胀系数βs ,满足式(12),则不论温度如何变化,均有ΔR t /R 0=0,从而达到温度自补偿的目的。
3结束语通常情况下,由于电阻应变式传感器设置的场所并非理想,在温度、湿度、压力等的因素影响下,可引起传感器灵敏度的变化和零点漂移现象,成为传感器使用过程中非常严重的问题。
虽然在传感器制作过程中已经采取了相应的措施,使存在的问题得到了很好的解决。
但是,应变式传感器还与应变片和粘接剂的性能、粘贴工艺的制定、结构设置、安装方法都有非常密切的关系,任何一方面都需要精心设计和制作[4-6]。
参考文献:[1]郁有文等.传感器原理及工程应用[M].西安:电子科技大学出版社,2008.[2]康昌鹤等.气温敏感器件及其应用[M].北京:科学出版社,1987.[3]周继明等.传感技术与应用[M].长沙:中南大学出版社,2005.[4]孙艳梅.压力传感器温度补偿的一种新方法[J].光通信研究,2011,(01)62-64.[5]苏亚等.压力传感器热零点漂移补偿各种计算方法的比较[J].传感技术学报,2004,(3):375-378.[6]袁成友,郭海峰.电阻应变式传感器的温度误差及补偿[J].中国矿井岩,2008,7(4):34-35.0引言“科学技术是第一生产力”,科技进步已经成为经济发展的动力。
知识创新、技术创新和高技术产业化是当今国际竞争的核心,技术创新是推动现代产业发展的动力,是经济增长的源泉。
一般用R&D 投入经费指标来反映一国的技术创新水平,用国内生产总值指标来反映一国的经济增长水平。
在过去的几年内我国的R&D 投入经费以及国内生产总之发生了巨大的变化,R&D 投入经费从1987年的74亿元增长到2009年的5802.1亿元,国内生产总值也从12058.6亿元增长到340506.9亿元,这些数据显示我国在技术创新和经济增长上均取得了很大的进步。
技术创新及科技进步对经济增长的贡献如何成为社会共同关注的话题和焦点。
1研究假设1928年美国数学家Charles Cobb 和经济学家Paul Douglas 提出了生产函数数学模型,其函数的一般形式为:Y=AL αK β(α+β=1,0≤α≤1,0≤β≤1)(1)其中Y 为产量,L 和K 分别表示劳动和资本的投入,A 表示技术和结构等因素,α、β均为参数,分别表示劳动的产出弹性和资本的产出弹性。
通过对柯布-道格拉斯函数进行一定的处理就得出著名的索洛模型,即索洛经济增长模型,其模型的形式为:a=y-αl -βk (2)其中,a 为科技进步STP 年增长速度;y 为我国的GDP 年增长速度;l 为研发人员投入RDL 的年增长速度;k 为研发投入RDF 的年增长速度。
α、β分别为RDL 与RDF 的产出弹性,RDL 、RDF 每增加1%时产出相应的增加α%,β%。
按照国家计委和国家统计局推荐的资本弹性系数确定资本、劳动力的弹性系数分别为α=0.65,β=0.35。
运用索洛剩余模型就可以得出科技进步STP 、研发投入RDF 及研发人员投入RDL 等因素对经济增长的影响度:Ea=a/y (3)Ek=βk/y (4)E l =a l /y (5)通过(3)、(4)、(5)式,对Ea 、Ek 、E l 进行求值,就可以分别求出经济增长中STP 贡献率Ea ,RDF 贡献率Ek 和RDL 贡献率E l 的大小。