第二章各向异性材料的应力应变关系
- 格式:ppt
- 大小:2.19 MB
- 文档页数:28
第二章应力和应变地震波传播的任何定量的描述,都要求其能表述固体介质的内力和变形的特征。
现在我们对后面几章所需要的应力、应变理论的有关部分作简要的复习。
虽然我们把这章作为独立的分析,但不对许多方程进行推导,读者想进一步了解其细节,可查阅连续介质力学的教科书。
三维介质的变形称为应变,介质不同部分之间的内力称为应力。
应力和应变不是独立存在的,它们通过描述弹性固体性质的本构关系相联系。
2.1 应力的表述——应力张量2.1.1应力表示考虑一个在静力平衡状态下,均匀弹性介质里一个任意取向的无限小平面。
平面的取向可以用这个平面的单位法向矢量nˆ来规定。
在nˆ方向的一侧施加在此面单位面积上的力叫做牵引力,用矢量),,()ˆ(zyxtttnt=表示。
在nˆ相反方向的另一侧施加在此面上的力与其大小相等,方向相反,即)ˆ()ˆ(ntnt-=-。
t在垂直于平面方向的分量叫做法应力,平行于平面方向的分量叫做剪应力。
在流体的情况下,没有剪应力,nptˆ-=,这里P 是压强。
上面的表示这是一个平面上的应力状况,为表示固体内部任意平面上的应力状态,应力张量τ在笛卡尔坐标系(图 2.1)里可以用作用于xyxzyz,,平面的牵引力来定义(:ˆˆˆ()()()ˆˆˆ()()()ˆˆˆ()()()xx xy xzx x xy y y yx yy yzz z z zx zy zzt x t y t zt x t y t zt x t y t zττττττττττ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(2.1)在右式的表示中,第一个下角标表示面的法线方向,第二个下角标表示该面上应力在该坐标轴上的投影。
图2.1 在笛卡尔坐标系里描述作用在无限小立方体面上的力的牵引力矢量)ˆ(),ˆ(),ˆ(z t y t xt 。
应力分量的符号规定如下:对于正应力,我们规定拉应力为正,压应力为负。
对于剪应力,如果截面的外法线方向与坐标轴一致,则沿着坐标轴的正方向为正,反之为负;如果截面方向与外法线方向相反,则沿着坐标轴反方向为正。
第二章 弹性力学基本理论及变分原理弹性力学是固体力学的一个分支。
它研究弹性体在外力或其他因素(如温度变化)作用下产生的应力、应变和位移,并为各种结构或其构件的强度、刚度和稳定性等的计算提供必要的理论基础和计算方法。
本章将介绍弹性力学的基本方程及有关的变分原理。
§2.1小位移变形弹性力学的基本方程和变分原理在结构数值分析中,经常用到弹性力学中的定解问题及与之等效的变分原理。
现将它们连同相应的矩阵形式的张量表达式综合引述于后,详细推导可参阅有关的书籍。
§2.1.1弹性力学的基本方程的矩阵形式弹性体在载荷作用下,体内任意一点的应力状态可由6个应力分量表示,它们的矩阵表示称为应力列阵或应力向量111213141516222324252633343536444546555666x x y y z z xy xy yz yz zx zx D D D D D D D D D D D D D D D D D D D D D σεσεσετγτγτγ⎧⎫⎡⎤⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪=⎢⎥⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎩⎭⎣⎦⎩⎭ (2.1.1) 弹性体在载荷作用下,将产生位移和变形,弹性体内任意一点位移可用3个位移分量表示,它们的矩阵形式为[]T u u v u v w w ⎧⎫⎪⎪==⎨⎬⎪⎪⎩⎭(2.1.2)弹性体内任意一点的应变,可由6个应变分量表示,应变的矩阵形式为x y Tz xy z xy yz zx xy yz zx εεεσεεεγγγγγγ⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎡⎤==⎨⎬⎣⎦⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭(2.1.3)对于三维问题,弹性力学的基本方程可写成如下形式 1 平衡方程0xy x zx x f x y z τστ∂∂∂+++=∂∂∂ 0xy y zy y f xyzτστ∂∂∂+++=∂∂∂0yz zx zz f x y zττσ∂∂∂+++=∂∂∂ x f 、y f 和z f 为单位体积的体积力在x 、y 、z 方向的分量。
我所认识的应力与应变的关系我所认识的本构关系可以从三个不同的受力条件下进行分析,第一是在弹性变形下的应力与应变的关系,第二是在屈服条件下的应力与应变的关系,第三是在塑性条件下的应力与应变的关系,而对应力与应变的关系的研究也可以归结为对本构关系的研究。
首先,弹塑性力学分别从静力学和几何学的角度出发,导出了平衡方程的和几何方程,这些方程均与物体的材料性质(物理性质)无关,因而适用于任何连续介质。
但仅仅依靠平衡方程和几何方程来解决实际中的工程问题是不够的。
由于平衡方程仅建立了力学参数(应力分量与外力分量)之间的联系,而几何方程也仅建立了运动学参数(位移分量与应变分量)之间的关系,所以平衡方程与几何方程式两类完全相互独立的方程,他们之间还缺乏必要的联系。
对于所求解的问题来讲,因为您未知量的数目多于任何一类方程的个数,所以无法利用这两类方程求的全部未知量。
平衡方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂222222000t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (1) 几何方程:⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u z w z v y w y v y u x v x u zx z yz y xy x γεγεγε (2) 为了求解具体的力学问题,还必须引进一些关系式,这些关系式即所谓的本构关系。
本构关系反映可变形体材料的固有特此那个,故也称为物理关系,它实际上是一组联系力学参数和运动学参数的方程式,即所谓的本构方程。
本构方程实际上就是一组反映可变形体材料应力和应变之间关系的方程。
在单向应力状态下,理想弹性材料的应力和应变之间的关系极其简单。
这就是在材料力学中寻出的如下形式的胡克定律:x x E εσ= (3)胡克定律是一个实验定律,在式(1.1)中的E 是材料性质有关的弹性常数,称为弹性模量和杨氏模量。
我所认识的应力应变关系应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
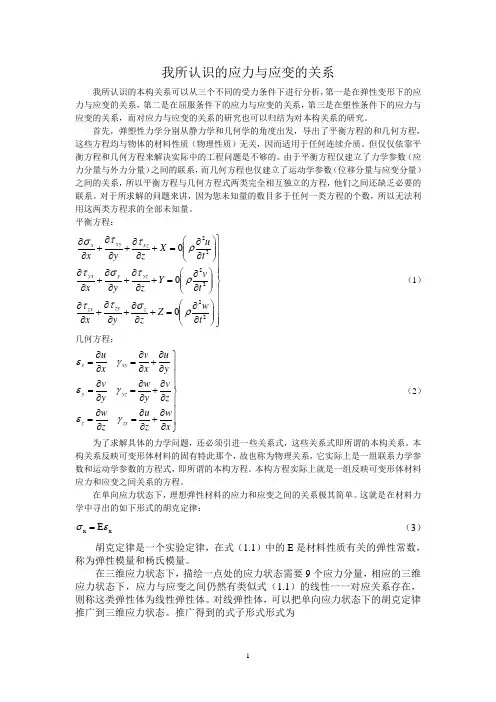
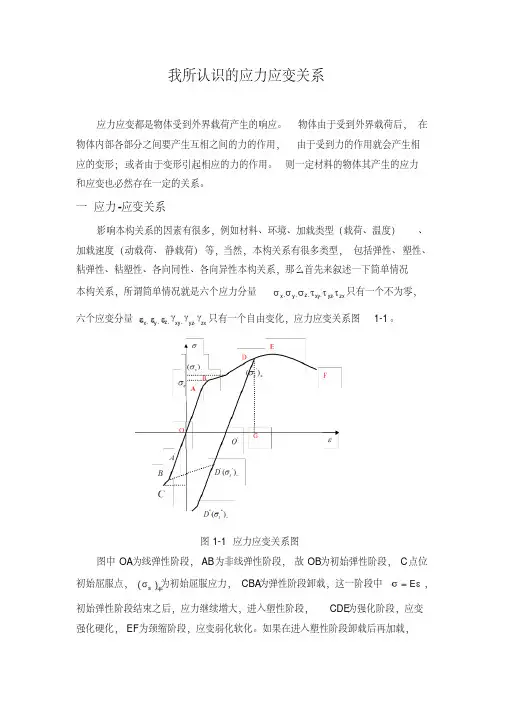
一应力-应变关系影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx、、z 、、、只有一个不为零,六个应变分量x y xy yz zx、、z 、、、只有一个自由变化,应力应变关系图1-1。
图1-1 应力应变关系图图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,s为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E ,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D点卸载至零,应力应变关系自D点沿'DO∥OA,其中DO到达'O点,且''OO为塑性应变p,DG为弹性应变e,总应变为它们之和。
此后再继续加载,为应力应变关系沿ODEF变化,D点为后继屈服点,OD为后继弹性阶段,'s后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC,s s,而在强化阶段',称为Bauschinger效应。
DOD,s s从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
因为通常情况下物体不仅仅处于简单应力状态,那么复杂应力状态下应力应变关系又如何呢?如果我们将材料性质理想化即假设材料是连续的、均匀的、各向同性的,忽略T、t的影响,忽略净水压力对塑性变形的影响,可以将应力应变关系归结为不同的类型,包括理想线弹性模型、理想刚塑性模型、线性强化刚塑性模型、理想弹塑性模型、线性强化弹塑性模型、幂强化模型、等向强化模型、随动强化模型。
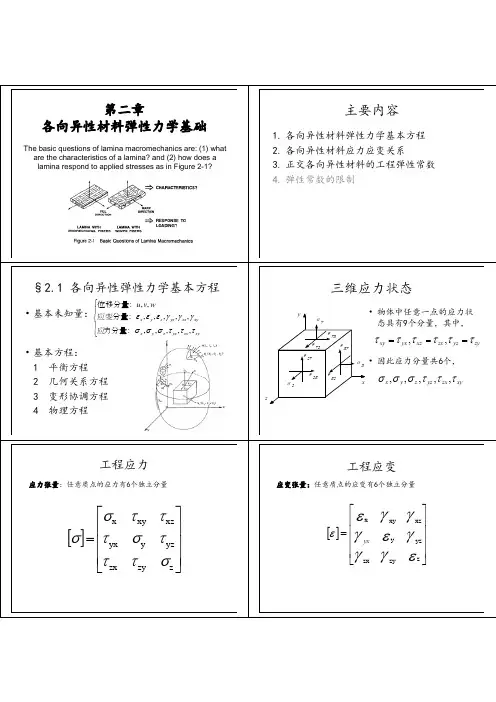
各向异性材料的应力应变关系各向异性材料是指在力学性能方面存在明显差异的材料,其应力应变关系是描述这种材料在外力作用下的变形规律。
与各向同性材料不同,各向异性材料的力学性能在不同的方向上有所不同,体现为不同的应力应变关系。
本文将介绍各向异性材料的应力应变关系,并探讨其应用。
各向异性材料的应力应变关系通常通过弹性常数矩阵来描述,即Hooke定律。
弹性常数矩阵是一个6x6的矩阵,其元素代表了材料在不同方向上的刚度。
根据物理对称性的不同,各向异性材料可以分为各种不同类型,包括各向异性、正交各向异性、轴对称各向异性和平面应力各向异性等。
以各向异性材料中最简单的铜单晶为例,其结构具有高度的各向异性。
在外力作用下,铜单晶沿着特定方向上的应力和应变不同于其他方向。
其应力应变关系可以通过线性弹性理论来描述。
假设应力和应变之间的关系为线性,即应力和应变之间满足线性比例关系,如下所示:σ=Cε其中,σ为应力矢量,C为弹性常数矩阵,ε为应变矢量。
对于各向异性材料,弹性常数矩阵C是一个对称矩阵,其中包含了各向异性材料在不同方向上的弹性模量和剪切模量等信息。
对于各向异性材料,应力和应变之间的关系不再是一维的线性关系,而是一个多维的关系。
因此,需要使用弹性常数矩阵来准确描述材料的力学性能。
通常,各向异性材料通过试验测定弹性常数矩阵。
测定的方法可以有很多种,包括单轴加载、多轴加载和声波测量等。
通过得到的弹性常数矩阵,可以确定各向异性材料在不同方向上的应力应变关系。
在工程实践中,各向异性材料的应力应变关系具有广泛的应用。
例如,在材料设计中,可以通过调整材料的各向异性来实现特定的力学性能。
各向异性材料也被广泛应用于复合材料、纤维材料和生物材料等领域。
在这些领域中,材料的各向异性通常被用来提高其强度、韧性和耐久性等性能。
总之,各向异性材料的应力应变关系描述了材料在外力作用下的变形规律。
通过弹性常数矩阵来准确描述材料的力学性能。
各向异性材料的应力应变关系在材料设计和工程实践中具有重要的应用。
材料力学线弹性材料知识点总结材料力学是工程学科中的重要分支,它研究物质在外力作用下的力学性质和变形行为。
其中,线弹性材料是一类具有线弹性特性的材料,其力学性能相对简单,因此被广泛应用于各个领域。
在本篇文章中,将对线弹性材料的相关知识进行总结和归纳。
I. 弹性模量弹性模量是衡量材料抵抗单位面积应力的能力,常用符号为E。
根据胡克定律,线弹性材料的应力和应变之间存在线性关系,即应力等于弹性模量与应变的乘积:σ = Eε。
II. 线弹性材料的应力应变关系线弹性材料的应力应变关系可以用杨氏模量和泊松比来描述。
杨氏模量表示材料在拉伸或压缩时的刚度,泊松比则表示材料在轴向受力时的横向收缩程度。
1. 杨氏模量杨氏模量是衡量材料单位应变下的应力增量,常用符号为E。
一般情况下,材料越硬,杨氏模量越大,说明材料具有较高的刚度。
2. 泊松比泊松比是衡量材料在轴向受力时横向收缩程度的比例系数,常用符号为ν。
泊松比的取值范围在0和0.5之间,其中,当材料不发生体积变化时,泊松比为0.5;当材料完全不会发生横向收缩时,泊松比为0。
III. 应力应变曲线应力应变曲线是反映材料在外力作用下应力和应变的关系的曲线图。
对于线弹性材料,应力应变曲线呈线性关系,分为弹性阶段和屈服阶段。
1. 弹性阶段在弹性阶段,材料的应变与应力之间存在线性关系,即材料会随着外力的撤离而恢复最初的形状。
该阶段的应力应变曲线为直线,呈比例关系。
2. 屈服阶段当材料受到较大的外力时,会超出其弹性限度,材料将出现应力和应变不再成比例的情况,即开始进入屈服阶段。
屈服阶段的应力应变曲线为弯曲线,曲线上的点称为屈服点。
IV. 各向同性与各向异性各向同性和各向异性是描述材料力学性质的两个重要概念。
1. 各向同性材料各向同性材料是指材料的性质在各个方向上具有相同的特性。
这意味着,在任何方向上施加的外力和应变对材料的响应都是相同的。
大部分金属和合金都属于各向同性材料。
2. 各向异性材料各向异性材料是指材料的性质在不同的方向上具有差异。