详细讲述串口通信的基本原理全解
- 格式:ppt
- 大小:431.50 KB
- 文档页数:24
stm32串口通信实验原理STM32是一款由STMicroelectronics公司推出的基于ARM Cortex-M 内核的32位微控制器。
在STM32系列中,串口通信是一种常见的外设模块,可以实现与其他设备之间的数据传输。
本文将介绍STM32串口通信的原理及实验方法。
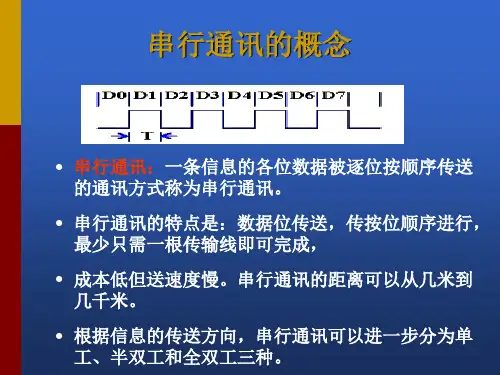
一、串口通信的原理串口通信是一种通过串行方式传输数据的通信方式。
在串口通信中,数据是一位一位地依次发送或接收的。
与并行通信相比,串口通信只需要两根信号线即可实现数据的传输,因此在资源有限的嵌入式系统中被广泛应用。
STM32的串口通信模块包括多个寄存器,其中包括控制寄存器、状态寄存器、数据寄存器等。
通过配置这些寄存器,可以实现串口通信的参数设置和数据的发送接收。
二、STM32串口通信的实验步骤以下是一种基本的STM32串口通信实验步骤:1. 硬件连接:将STM32开发板的串口引脚与其他设备的串口引脚通过串口线连接起来。
一般来说,串口通信需要连接的引脚包括TX (发送引脚)、RX(接收引脚)、GND(地线)。
2. 引脚配置:通过STM32的引脚复用功能,将相应的GPIO引脚配置为串口功能。
具体的引脚配置方法可以参考STM32的开发板手册或者相关的资料。
3. 时钟配置:配置STM32的时钟源,使得串口通信模块能够正常工作。
一般来说,串口通信模块使用的时钟源可以选择系统时钟或者外部时钟。
4. 串口配置:配置串口通信模块的参数,包括波特率、数据位、停止位、校验位等。
这些参数的配置需要根据实际的通信需求来确定。
5. 数据发送:通过向数据寄存器写入数据,向其他设备发送数据。
在发送数据之前,需要通过状态寄存器的标志位判断串口是否空闲,以确保数据能够正常发送。
6. 数据接收:通过读取数据寄存器的数据,从其他设备接收数据。
在接收数据之前,需要通过状态寄存器的标志位判断是否有数据到达,以确保数据能够正确接收。
7. 中断处理:在串口通信过程中,可以使用中断来实现数据的异步传输。
串口工作原理
串口工作原理是一种将数据传输通过串行的方式进行的通信方式。
与并行传输相比,串行传输只使用一条数据线进行传输,节省了硬件接口的成本。
串口的工作原理主要包括数据的传输、传输速率的控制和数据的校验。
数据传输是指将要传输的数据从发送端传输到接收端的过程。
在串口通信中,数据被分割成一个一个的数据包进行传输。
发送端将数据包按照一定的方式编码为电信号,通过串口线路发送到接收端。
接收端接收到电信号后,将其解码为数据包,并将其还原为原始数据。
传输速率的控制是指确定数据传输的速度。
在串口通信中,传输速率一般以波特率(波特/秒,bps)来衡量,即每秒钟传输
的位数。
发送端和接收端必须以相同的波特率进行通信,以保证数据的正确传输。
数据的校验是为了保证数据的正确性。
在串口通信中,常用的校验方式是通过添加一位校验位的方式实现。
发送端在发送数据时,通过对数据进行一定的运算,计算出校验位,并将其添加到数据中一同发送。
接收端在接收数据后,进行相同的运算,对接收到的数据进行校验。
如果计算出的校验位与接收到的校验位相同,则表示数据传输没有出现错误。
总结来说,串口通信将要传输的数据分割成数据包,通过串行
的方式进行传输。
传输速率的控制以及数据的校验保证了数据的正常传输和正确性。
RS485串口通信原理一、RS485串口通信协议原理与特点1.电平传输特点:RS485通信使用差分信号进行传输,即通过正负两个信号线分别传输高低电平,抵消了电磁干扰对信号的影响,提高了传输的抗干扰性能。
2.单主多从:RS485通信存在一个主机和多个从机,主机负责向从机发送指令,而从机接收指令并返回数据。
3.半双工通信:RS485通信只能在一个方向上进行通信,即由主机发送指令到从机,或者从机发送数据到主机,无法同时进行双向通信。
4.多层级网络:RS485通信可以通过多级网络实现跨越更长的距离和更多设备的通信,每级网络之间通过中继器进行连接。
二、RS485通信方式1.同步方式:同步通信是指主机和从机之间在时钟方面进行同步的通信方式。
主机发送时钟信号给从机,从机根据时钟信号进行数据发送和接收,确保数据的完整性和准确性。
同步通信的优点是数据传输速度快,但对时钟同步要求较高。
2.异步方式:异步通信是指主机和从机之间不需要进行时钟同步的通信方式。
主机和从机之间通过控制字符进行数据传输和接收,可以自由控制数据传输速度和时钟精度。
异步通信的优点是适用性广,不需要严格的时钟同步,但数据传输速度较慢。
三、RS485通信协议1.物理层:RS485通信采用差分传输的物理层信号,正负两个信号线分别传输高低电平数据。
通信时需进行数据电平转换,将逻辑高电平和逻辑低电平转换为物理层的高电平和低电平信号。
2.数据链路层:RS485通信的数据链路层采用帧结构进行数据的传输和接收。
数据帧包括起始位、数据位、校验位和停止位。
起始位用于表示数据帧的开始,数据位用于存储实际传输的数据,校验位用于验证数据的准确性,停止位用于表示数据帧的结束。
四、RS485通信应用场景1.工业自动化控制:RS485通信可用于PLC控制系统、工业仪表传感器等设备之间的通信,可实现工业自动化控制和数据采集。
2.楼宇自控系统:RS485通信可用于楼宇自控系统中的空调、照明、电梯等设备之间的通信,实现楼宇设备的集中控制和管理。
串口通信原理串口通信是一种用于在计算机或其他设备之间传输数据的通信方式。
它是一种通过串行线路进行数据传输的通信方式,相比并行通信,串口通信可以节省大量的线路资源,因此在很多场合下被广泛应用。
本文将介绍串口通信的原理及其在实际应用中的一些特点。
首先,串口通信的原理是通过串行线路将数据一位一位地传输。
在串口通信中,数据是按照一定的速率通过串行线路进行传输的,这个速率被称为波特率。
波特率越高,数据传输的速度也就越快。
在进行串口通信时,发送端和接收端的波特率必须是一致的,否则会导致数据传输错误。
其次,串口通信中的数据是通过数据位、停止位和校验位来进行传输的。
数据位指的是每个数据字节中实际用于传输数据的位数,通常为8位。
停止位是用来标识一个数据帧的结束的位,通常为1位。
校验位是用来验证数据传输是否正确的位,通常有奇校验、偶校验和无校验三种方式。
通过这些位的组合,可以确保数据在传输过程中不会出现错误。
另外,串口通信还有两种常见的接口标准,分别是RS-232和RS-485。
RS-232是一种较为常见的串口通信接口标准,它通常用于在个人电脑和外部设备之间进行数据传输。
RS-485是一种用于工业控制系统中的串口通信接口标准,它可以支持多个设备之间的数据传输,并且具有较高的抗干扰能力。
在实际应用中,串口通信常常被用于各种设备之间的数据传输,比如计算机与打印机、计算机与传感器等。
通过串口通信,这些设备可以方便地进行数据交换,实现各种功能。
另外,串口通信也被广泛应用于各种嵌入式系统中,比如工业控制系统、智能家居系统等。
总的来说,串口通信是一种简单而有效的数据传输方式,它通过串行线路进行数据传输,可以节省大量的线路资源,因此在各种设备之间的数据传输中得到了广泛的应用。
希望本文对串口通信的原理及其在实际应用中的特点有所帮助。
单片机串口通信原理一、引言单片机串口通信是一种常见的通信方式,它通过串口将单片机与其他设备进行数据交换。
本文将介绍单片机串口通信的原理、工作方式以及相关的应用。
二、单片机串口通信原理单片机串口通信是通过串行通信接口实现的。
串口通信使用两根信号线进行数据传输,分别是发送线(TXD)和接收线(RXD)。
发送端将要传输的数据按照一定的规则转换为电信号,通过发送线发送出去;接收端则将接收到的电信号转换为数据,通过接收线接收。
在单片机串口通信中,数据的传输是按照一定的帧格式进行的。
典型的帧格式包括起始位、数据位、校验位和停止位。
起始位用来表示数据传输的开始,通常为逻辑低电平;数据位用来存储要传输的数据,通常为8位;校验位用来检测数据传输的正确性,可以用于纠错;停止位用来表示数据传输的结束,通常为逻辑高电平。
三、单片机串口通信工作方式单片机串口通信有两种工作方式,分别是同步方式和异步方式。
1. 同步方式同步方式的特点是发送端和接收端的时钟信号保持同步。
发送端和接收端需要在通信之前约定好时钟信号的频率和相位,以确保数据的传输速度和稳定性。
同步方式的优点是传输速度快且稳定,但需要更复杂的硬件支持。
2. 异步方式异步方式的特点是发送端和接收端的时钟信号不同步。
发送端和接收端之间不需要约定时钟信号,而是通过起始位和停止位来进行数据的同步。
异步方式的优点是硬件要求简单,适用于大多数场景。
四、单片机串口通信应用单片机串口通信广泛应用于各种领域,例如智能家居、工业自动化、医疗设备等。
通过串口通信,单片机可以与各种传感器、执行器、显示器等设备进行数据交换,实现各种功能。
1. 智能家居在智能家居系统中,单片机可以通过串口与各种传感器连接,如温度传感器、湿度传感器、烟雾传感器等。
通过串口通信,单片机可以读取传感器的数据,并根据数据进行相应的控制,如控制空调、灯光等。
2. 工业自动化在工业自动化领域,单片机串口通信被广泛应用于PLC(可编程逻辑控制器)和人机界面(HMI)之间的数据交换。
c51串口通信原理
C51串口通信的原理主要涉及到串行数据传输的方式。
在C51中,串口通
信可以通过串行数据通信模式进行,包括单工通信、半双工通信和全双工通信。
在串行通信中,数据是一位一位地进行传输的。
每一位数据在传输中都占据一个固定的时间长度。
串行通信的一个主要优点是传输线少,占用引脚资源少,成本低,适合远距离传送。
具体到C51的串口通信,其工作方式可以分为方式0、方式1等。
在方式0时,串行口作为同步移位寄存器的输入输出方式,数据由RXD()引脚输
入或输出,同步移位脉冲由TXD()引脚输出。
发送和接收均为8位数据,低位在先,高位在后。
在方式1时,它是10位数据的异步通信口,TXD为数据发送引脚,RXD为数据接收引脚,传送一帧数据的格式包括1位起始位、8位数据位和1位停止位。
此外,关于串行口的波特率,PCON中有一位SMOD与串行口工作有关:SMOD()波特率倍增位。
在串行口方式1、方式2、方式3时,波特率与SMOD有关,当SMOD=1时,波特率提高一倍。
复位时,SMOD=0。
以上是C51串口通信的基本原理,如需了解更多信息,建议咨询专业技术人员或查阅C51相关的专业书籍。
单片机中串口通信接口技术详解串口通信是在计算机和外部设备之间进行数据传输的重要方式之一。
在单片机应用中,串口通信也扮演着十分重要的角色,提供了单片机与其他外设或者计算机之间的数据传输能力。
本文将详细介绍单片机中串口通信接口技术。
一、串口通信的基本原理串口通信是通过串行方式进行数据传输的一种通信方式。
它与并行通信相对应,串行通信只需要一根数据线,而并行通信需要多根数据线。
串口通信可以分为两类:同步串口通信和异步串口通信。
在同步串口通信中,数据传输的时钟信号由设备内部的时钟源提供,数据传输的速率由时钟源的频率决定。
而在异步串口通信中,数据传输的时钟信号和数据信号是分开的,传输速率可以根据通信双方的协商来确定。
二、串口通信的硬件实现单片机中的串口通信需要通过硬件来实现。
常见的串口通信硬件包括串口通信芯片和串口对应的引脚。
串口通信芯片常用的有MAX232、MAX3232等。
这些芯片可以将单片机的串口信号转换为标准的RS232或者RS485信号,与其他外设或者计算机进行通信。
通常,串口通信需要使用两个引脚,一个用于发送数据(TX),一个用于接收数据(RX)。
这两个引脚需要通过串口通信芯片与单片机进行连接。
三、单片机中的串口通信协议为了实现串口通信,需要定义一种通信协议来规定数据的格式和传输方式。
常见的串口通信协议有UART、SPI和I2C。
UART(Universal Asynchronous Receiver Transmitter)是最常见和简单的串口通信协议,适用于单片机与计算机之间的通信。
UART通信使用异步方式,数据传输的速率可以根据通信双方协商来确定。
SPI(Serial Peripheral Interface)是一种同步串口通信协议,适用于单片机与外设之间的通信。
SPI通信需要至少4根引脚:时钟线(SCLK)、主机输出线(MOSI)、主机输入线(MISO)和片选拉线(SS)。
SPI通信可以实现多个外设与单片机之间的通信。
串口通信原理
串口通信是两台设备之间的一种通信方式,它的基本原理是,将一个字节的信息拆分成位串,然后按照一定的标准进行传输。
这种方式的优势在于,数据传输速度快、容易控制、通信质量高,以及容易实现硬件级别的数据交换,是许多系统中广泛使用的通信方式。
串口通信可以分为两种,一种是异步通信,另一种是同步通信。
异步通信是在发送端和接收端之间使用不同的时序信号,实现通信的一种方式。
在异步通信中,两端之间的通信可以不同的速率,只要确保发送信号的数据能够在接收端正确的解析即可。
而同步通信是在发送端和接收端之间是使用相同的时序信号,如果发送的信号和接收的信号不匹配,则会导致数据无法正确的传输。
串口通信的基本结构主要由三部分组成,即接收器、发送器和控制器。
接收器是负责将接收到的信号转换成数据的部件,发送器负责将数据转换成信号发送出去,控制器则是控制数据传输过程和格式的部件。
串口通信的基本原理就是将数据以位串的形式发送出去,接收端接收到的位串信号会被解析成原始的数据,这样就实现了设备之间的数据传输。
当数据传输量大时,串口通信就显得尤为重要,因为它可以将大量的数据拆分成若干字节,依次进行传输,这样可以大大
提高数据传输的效率,也可以更好的保证数据传输的质量。
总之,串口通信是一种高效的数据传输方式,它的基本原理是将一个字节的信息拆分成位串,并按照一定的标准发送出去,由接收端解析成原始的数据,以实现设备之间的数据传输。
串口通信的基本原理详解串口通信是一种常用的数据传输方式,其基本原理是通过串行传输数据位来实现数据的发送和接收。
在串口通信中,数据以位(bit)的形式一个一个地传输。
本文将详细介绍串口通信的基本原理。
首先,串口通信的硬件部分是由发送端和接收端两个设备组成。
发送端负责将数据转换成串行形式并发送出去,接收端负责接收串行数据并将其转换为可读的形式。
1.串行传输串口通信采用串行传输的方式,也就是将数据位一个一个地按顺序传输。
每个数据位由低电平(0)和高电平(1)两种状态表示。
在发送端,数据通过转换电路将其从并行形式转换为串行形式,然后通过串行线路逐位发送出去。
在接收端,串行数据被逆转换电路转换回并行形式,然后进一步处理。
2.起始位和停止位为了保证接收端能够正确识别数据的开始和结束位置,串口通信中一般会在每个数据位之前和之后添加额外的位。
起始位用于表示数据的开始,一般为低电平(0);停止位用于表示数据的结束,一般为高电平(1)。
起始位和停止位之间是实际的数据位,其长度根据通信需求确定。
3.波特率4.数据校验为了确保数据的可靠传输,在串口通信中常常会进行数据校验。
常见的校验方式有奇偶校验和循环冗余校验(CRC)。
奇偶校验是一种简单的校验方式,根据发送数据的位数中1的个数进行判断,从而决定校验位的值。
CRC校验则是通过生成多项式对发送的数据进行计算,然后将计算得到的余数作为校验位发送出去,在接收端进行同样的计算,通过比较余数是否相同来判断数据的正确性。
5.流控制串口通信中的流控制是为了解决发送端和接收端速度不一致而造成的数据丢失问题。
当数据发送速度过快时,接收端可能来不及处理即将到来的数据,导致数据丢失。
为了解决这个问题,可以使用硬件流控制或软件流控制。
硬件流控制一般通过发送端和接收端之间的额外线路来实现,例如使用RTS(请求发送)和CTS(清除发送)信号。
软件流控制则是通过发送特定的控制字符来通知对方是否可以继续发送数据。
stm32的串口通信知识点STM32是一款嵌入式微控制器,具有强大的串口通信功能。
串口通信是一种在计算机和外部设备之间进行数据传输的常用方式。
在STM32中,串口通信可以通过USART模块来实现。
本文将介绍STM32串口通信的相关知识点。
一、串口通信的基本原理串口通信是通过发送和接收数据位来实现的。
在STM32中,数据的发送和接收是通过USART模块来完成的。
USART模块包含了使能控制、数据位长度、停止位、波特率等参数的设置。
发送数据时,将数据经过处理后发送到USART模块,然后USART模块将数据转换为连续的电平信号通过串口发送出去;接收数据时,USART模块将接收到的连续电平信号转换为离散的数据位,并通过处理后输出。
二、USART模块的配置在使用USART模块进行串口通信之前,需要对USART模块进行配置。
配置主要包括以下几个方面:1. 使能控制:选择USART模块的使能状态,可以选择使能或禁用USART模块。
2. 数据位长度:设置发送和接收数据的位数,常见的有8位和9位两种长度。
3. 停止位:设置发送数据的停止位长度,常见的有1位和2位两种长度。
4. 校验位:选择是否启用校验位,可以选择奇校验、偶校验或不使用校验。
5. 波特率:设置串口通信的波特率,波特率是指每秒传输的比特数。
6. 硬件流控制:选择是否启用硬件流控制,硬件流控制可以通过控制RTS和CTS信号来进行数据流的控制。
三、USART模块的工作方式USART模块可以工作在全双工模式和半双工模式。
在全双工模式下,USART模块可以同时进行发送和接收操作;在半双工模式下,USART 模块只能进行发送或接收操作。
在使用USART模块进行串口通信时,需要根据具体的应用场景选择合适的工作模式。
四、串口通信的数据传输在进行串口通信时,数据的传输是通过发送和接收缓冲区来完成的。
发送缓冲区用于存储待发送的数据,发送完成后,数据将从发送缓冲区中移出;接收缓冲区用于存储接收到的数据,接收完成后,数据将从接收缓冲区中取出。
stm32的串口通信原理
STM32的串口通信原理是基于UART(通用异步收发器)协
议实现的。
UART是一种简单的物理层串口通信协议,常用于连接计算机和外部设备进行数据传输。
在STM32微控制器中,串口通信由UART硬件模块实现。
UART模块包含发送和接收两个部分,可以实现同时发送和接收数据。
串口通信的原理如下:
1. 波特率设置:通过配置STM32的UART模块来设置通信的
波特率,波特率决定了数据传输速率。
常见的波特率有9600、115200等。
2. 数据格式设置:可以配置数据位数、停止位数和校验位。
常用的数据位数是8位,停止位可以选择1位或2位,校验位可
以选择无校验、奇校验或偶校验。
3. 数据传输:在发送数据时,将数据写入UART发送寄存器,UART模块将数据从发送寄存器传输到通信引脚;在接收数据时,UART模块会将接收到的数据存储在接收寄存器中,我们可以从中读取数据。
4. 数据帧:UART通信中的数据是按照数据帧的方式进行传输的。
一个数据帧通常由起始位、数据位、校验位和停止位组成。
起始位标志着一个数据帧的开始;数据位是实际传输的数据;校验位用于验证数据的正确性;停止位表示一个数据帧的结束。
5. 中断和DMA:STM32的UART模块支持中断和DMA(直
接存储器访问)方式,可以在传输完成或接收到数据时触发相应的中断或DMA传输,提高系统效率。
通过以上原理,我们可以通过配置STM32的UART模块来实现串口通信。
其中,发送和接收数据需要按照一定的数据帧格式进行,同时可以利用中断或DMA来提高通信效率。
单片机中的串口通信原理与实现串口通信是一种常用的数字通信方式,广泛应用于单片机领域。
本文将介绍单片机中串口通信的原理和实现方法。
一、串口通信原理串口通信是通过数据线将数据逐位地传输,并根据一定的协议规定传输格式和速率。
在单片机中,常用的串口通信协议有UART和SPI。
1. UART通信UART(Universal Asynchronous Receiver/Transmitter)是一种异步串行通信协议,它通过单线传输数据。
UART通信常用于短距离传输,适用于单片机与外部设备的通信。
UART通信包含以下几个关键参数:- 波特率(Baud Rate):表示每秒传输的比特数,常见的波特率有9600、115200等。
发送和接收双方必须设置相同的波特率。
- 数据位(Data Bits):表示每个字节的位数,常见的数据位有8位。
- 停止位(Stop Bit):表示在每个字节之后发送的停止位的数量,常见的停止位有1位、2位。
- 校验位(Parity Bit):用于检测数据传输中的错误,常见的校验位有无校验位、奇校验位、偶校验位。
UART通信的原理是通过波特率控制传输速率,数据位和停止位控制数据的位数,校验位用于检测传输错误。
2. SPI通信SPI(Serial Peripheral Interface)是一种同步串行通信协议,它通过四线(时钟线、数据线、主从选择线、使能线)传输数据。
SPI通信常用于短距离高速传输,适用于单片机与外部设备的通信。
SPI通信包含以下几个关键参数:- 时钟极性和相位:SPI通信可以选择不同的时钟极性和相位,用于控制数据的传输方式。
- 数据位顺序:SPI通信可以选择先传输最低位还是最高位。
SPI通信的原理是通过时钟信号同步传输数据,数据线上的数据在时钟上升或下降沿进行传输。
二、串口通信实现在单片机中,串口通信的实现需要硬件和软件两部分。
1. 硬件实现硬件上,需要使用UART或SPI模块,并连接相应的引脚。
串口通信基本原理一.串行通信的基本原理串行端口的本质功能是作为CPU和串行设备间的编码转换器。
当数据从 CPU 经过串行端口发送出去时,字节数据转换为串行的位。
在接收数据时,串行的位被转换为字节数据。
在Windows环境(Windows NT、Win98、Windows2000)下,串口是系统资源的一部分。
应用程序要使用串口进行通信,必须在使用之前向操作系统提出资源申请要求(打开串口),通信完成后必须释放资源(关闭串口)。
串口通信程序的流程如下图:二.串口信号线的接法一个完整的RS-232C接口有22根线,采用标准的25芯插头座(或者9芯插头座)。
25芯和9芯的主要信号线相同。
以下的介绍是以25芯的RS-232C为例。
①主要信号线定义:2脚:发送数据TXD; 3脚:接收数据RXD; 4脚:请求发送RTS;5脚:清除发送CTS;6脚:数据设备就绪DSR;20脚:数据终端就绪DTR;8脚:数据载波检测DCD;1脚:保护地;7脚:信号地。
②电气特性:数据传输速率最大可到20K bps,最大距离仅15m.注:看了微软的MSDN 6.0,其Windows API中关于串行通讯设备(不一定都是串口RS-232C或RS-422或RS-449)速率的设置,最大可支持到RS_256000,即256K bps! 也不知道到底是什么串行通讯设备?但不管怎样,一般主机和单片机的串口通讯大多都在9600 bps,可以满足通讯需求。
③接口的典型应用:大多数计算机应用系统与智能单元之间只需使用3到5根信号线即可工作。
这时,除了TXD、RXD以外,还需使用RTS、CTS、DCD、DTR、DSR等信号线。
(当然,在程序中也需要对相应的信号线进行设置。
)以上接法,在设计程序时,直接进行数据的接收和发送就可以了,不需要对信号线的状态进行判断或设置。
(如果应用的场合需要使用握手信号等,需要对相应的信号线的状态进行监测或设置。
)三.16位串口应用程序的简单回顾16位串口应用程序中,使用的16位的Windows API通信函数:①OpenComm() 打开串口资源,并指定输入、输出缓冲区的大小(以字节计);CloseComm() 关闭串口;例:int idComDev;idComDev = OpenComm("COM1", 1024, 128);CloseComm(idComDev);②BuildCommDCB() 、setCommState()填写设备控制块DCB,然后对已打开的串口进行参数配置;例:DCB dcb;BuildCommDCB("COM1:2400,n,8,1", &dcb);SetCommState(&dcb);③ReadComm 、WriteComm()对串口进行读写操作,即数据的接收和发送.例:char *m_pRecieve; int count;ReadComm(idComDev,m_pRecieve,count);Char wr[30]; int count2;WriteComm(idComDev,wr,count2);16位下的串口通信程序最大的特点就在于:串口等外部设备的操作有自己特有的API函数;而32位程序则把串口操作(以及并口等)和文件操作统一起来了,使用类似的操作。
串口通讯的原理
串口通讯是一种通过串口实现数据传输的方式。
在计算机中,串口是一组用于数据传输的电气和机械接口,通常用于连接计算机和外部设备。
串口通讯可以在不同的设备之间进行数据传输,如计算机和串口打印机、计算机和微控制器等。
串口通讯的原理是通过将数据以比特流的形式传输,其中每个比特由始位、数据位、校验位和停止位组成。
始位是一位低电平,用于标识数据传输的起始,停止位是一位高电平,用于标识数据传输的结束,数据位用于传输实际的数据,校验位用于验证数据传输的正确性。
串口通讯的速率由波特率来定义,波特率指的是每秒钟传输的比特数。
通常情况下,串口通讯的波特率为9600bps、115200bps等常见的值。
串口通讯的应用非常广泛,可以用于数据采集、监控、控制等方面。
在工业自动化、仪器仪表等领域,串口通讯是一种非常重要的通讯方式。
- 1 -。
uart串口工作原理UART(Universal Asynchronous Receiver/Transmitter)是一种通用异步收发器,它是串行通信中常用的一种方式。
UART串口的工作原理是通过发送和接收数据帧来实现数据的传输。
UART串口通信的基本原理是将要发送的数据按照一定的格式进行编码,然后通过串口发送出去;接收端接收到数据后,按照相同的格式进行解码,得到原始数据。
UART串口通信的数据帧一般包括起始位、数据位、校验位和停止位。
具体地,UART串口的工作过程如下:1. 起始位:当发送端要发送数据时,首先发送一个低电平的起始位来表示数据帧的开始。
起始位的作用是告诉接收端数据的传输即将开始。
2. 数据位:起始位之后就是要发送的数据位。
数据位的数量可以是5、6、7或8个,表示数据位的位数。
一般情况下,数据位的位数是8,即一个字节。
3. 校验位:数据位之后可以有一个校验位。
校验位的作用是用来检测数据传输过程中的错误。
常见的校验方式有奇偶校验和校验和两种。
奇偶校验是指校验位的值使得数据位的位数为奇数或偶数;校验和是指校验位的值使得数据位和校验位的和为一个固定值。
4. 停止位:校验位之后是一个或多个停止位。
停止位的作用是告诉接收端数据帧的结束。
通常情况下,停止位是一个高电平的信号。
在UART串口通信中,发送端和接收端的波特率必须一致。
波特率是指数据传输的速率,也就是每秒钟传输的比特数。
常见的波特率有9600、19200、38400等。
UART串口通信的优点是简单、易用,而且适用于各种不同的应用场景。
它在嵌入式系统、通信设备、传感器等领域中得到广泛应用。
总结一下,UART串口是一种通用异步收发器,通过发送和接收数据帧来实现数据的传输。
它的工作原理是将要发送的数据按照一定的格式进行编码,然后通过串口发送出去;接收端接收到数据后,按照相同的格式进行解码,得到原始数据。
UART串口通信的数据帧一般包括起始位、数据位、校验位和停止位。