Z变换和差分方程
- 格式:ppt
- 大小:447.00 KB
- 文档页数:42
Z变换及差分⽅程的求解第⼆讲离散时间动态经济系统运动分析及稳定性分析2.1离散时间函数与Z变换⽬的要求:通过本节的学习使学⽣掌握离散时间函数及Z变换的概念,会使⽤Z变换的性质解决问题,掌握差分⽅程及离散时间系统的运动分析⽅法。
教学内容:我们经常会遇到利⽤离散时间函数表⽰的差分⽅程或差分⽅程组,这在经济管理中经常遇到。
现介绍离散时间函数,差分⽅程后⾯介绍。
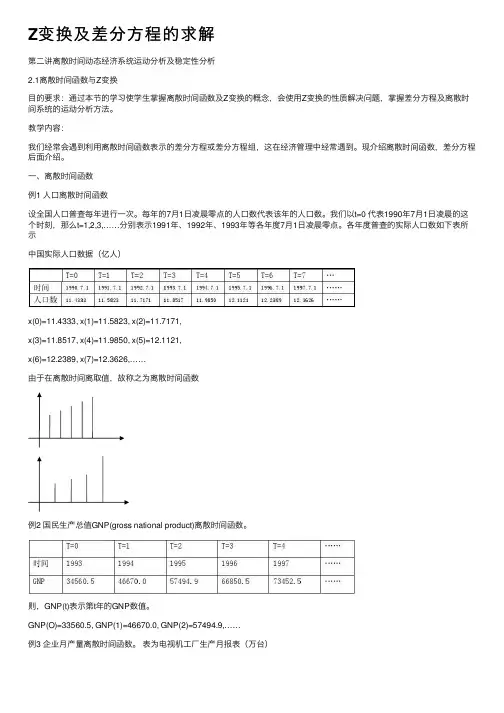
⼀、离散时间函数例1 ⼈⼝离散时间函数设全国⼈⼝普查每年进⾏⼀次。
每年的7⽉1⽇凌晨零点的⼈⼝数代表该年的⼈⼝数。
我们以t=0 代表1990年7⽉1⽇凌晨的这个时刻,那么t=1,2,3,……分别表⽰1991年、1992年、1993年等各年度7⽉1⽇凌晨零点。
各年度普查的实际⼈⼝数如下表所⽰中国实际⼈⼝数据(亿⼈)x(0)=11.4333, x(1)=11.5823, x(2)=11.7171,x(3)=11.8517, x(4)=11.9850, x(5)=12.1121,x(6)=12.2389, x(7)=12.3626,……由于在离散时间离取值,故称之为离散时间函数例2 国民⽣产总值GNP(gross national product)离散时间函数。
则,GNP(t)表⽰第t年的GNP数值。
GNP(O)=33560.5, GNP(1)=46670.0, GNP(2)=57494.9,……例3 企业⽉产量离散时间函数。
表为电视机⼯⼚⽣产⽉报表(万台)则,Y(0)=1.5, Y(1)=2, Y(2)=1.8,……可以看出,经济管理实践中基本上采⽤离散时间函数来表达各种变量的变化,并该函数没有解析表达式,只有图象、列表表达式。
其⾃变量为离散时间。
⼆、Z 变换及其逆变换导⾔:Z 变换是怎么发明出来的?⽜顿、莱布尼兹等发明了微积分,之后发明了常系数微分⽅程及⽅程组。
在求解⽅程时总结经验,简化计算,如⽤符号s 表⽰微分运算s=d/dt,即s 〃f(t)=df(t)/dt 。
matlab用z变换求解差分方程Z变换是一种非常重要的信号分析工具,在MATLAB中,可以使用Symbolic Math Toolbox进行Z变换的计算和求解差分方程。
Z变换是一种将离散时间信号从时间域转换到复平面域的方法。
它与拉普拉斯变换的关系类似,但适用于离散时间信号的分析。
在MATLAB 中,使用syms函数创建符号变量来表示Z变换的变量,然后使用ztrans函数进行Z变换的计算和求解差分方程。
下面将通过一个简单的例子来说明如何使用MATLAB进行Z变换求解差分方程。
假设有一个差分方程:y[n]-0.5y[n-1]+0.25y[n-2]=x[n]首先,使用syms函数创建符号变量:syms z定义输入信号和初始条件:x=z^2;%输入信号y0=1;%初始条件y[-1]y1=0;%初始条件y[-2]然后,使用ztrans函数进行Z变换计算:Y = ztrans(y[n], n, z);X = ztrans(x, n, z);差分方程中的Y和X分别表示Y(z)和X(z),因此可以写出差分方程的Z变换方程:Y-0.5*z^(-1)*Y+0.25*z^(-2)*Y=X然后,将方程转化为Y(z)的表达式:Y = solve(Y - 0.5*z^(-1)*Y + 0.25*z^(-2)*Y == X, Y);至此,Z变换方程求解完成,可以使用ilaplace函数从Z域转换回时间域,以获得Y[n]的表达式:y = ilaplace(Y, z, n);最后,可以将结果绘制出来:n=-10:10;%时间范围y_n = subs(y, n, n); % 计算y[n]的值stem(n, y_n); % 绘制离散时间信号综上所述,我们可以使用MATLAB的Symbolic Math Toolbox进行差分方程的Z变换求解,这对于信号分析和系统设计非常有用。
信号与系统是电子信息类专业中重要的课程之一,差分方程是信号与系统中重要的内容之一,而z域解是差分方程求解中常用的方法之一。
本文将针对差分方程z域解中前向差分进行较为详细的介绍,希望能够为读者对该知识点有更深入的理解。
一、差分方程的引入在信号与系统中,差分方程是描述离散时间信号的重要数学工具。
它可以描述离散时间信号的演变规律,对于系统的分析和设计具有重要意义。
二、z变换及z域表示z变换是拉普拉斯变换在离散时间信号中的推广,它可以将离散时间域中的信号转换到z域。
在z域中,信号与系统的分析更加方便,因此z 变换及z域表示是信号与系统中的重要内容。
三、差分方程的z域解差分方程的z域解即是将差分方程通过z变换转换到z域中进行求解的过程。
z域解可以帮助我们更加清晰地了解离散时间系统的特性,并且为系统的分析提供了重要的数学工具。
四、前向差分前向差分是差分方程中常用的一种形式,它通过求取当前时刻与前一时刻的差分来描述离散时间信号的演变规律。
前向差分在信号与系统中具有重要的应用,对系统的分析和设计有着重要的意义。
五、前向差分在z域中的表示在z域中,前向差分可以通过z变换的性质进行表示,这样可以方便地进行系统的分析和设计。
掌握前向差分在z域中的表示对于信号与系统的学习具有重要意义。
六、前向差分在系统分析中的应用前向差分在系统分析中有着广泛的应用,特别是在控制系统中的离散控制中,前向差分被广泛地应用。
了解前向差分在系统分析中的应用对于提高学习者的专业素养有着重要的作用。
七、结论本文对差分方程z域解中前向差分进行了较为详细的介绍,希望能够帮助读者对该知识点有更深入的理解。
差分方程z域解在信号与系统中有着重要的作用,掌握这一知识点对于提高学习者的专业素养具有重要意义。
希望读者能够通过本文对差分方程z域解中前向差分有所了解,进一步加深对信号与系统这一重要学科的理解。
由于差分方程z 域解在离散时间信号与系统中的重要性,我们需要进一步深入研究前向差分在系统分析中的应用。
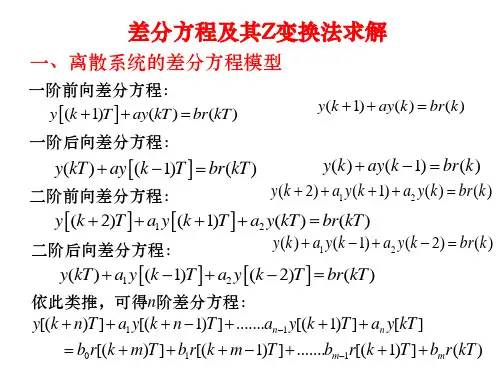
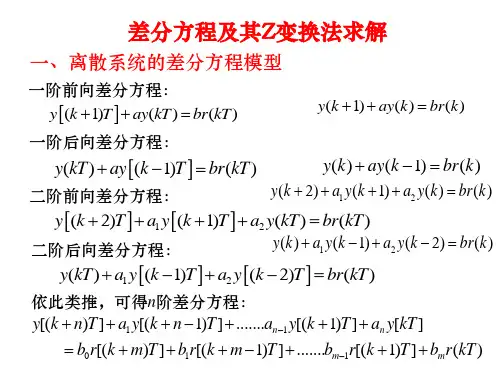
第3章线性离散时间系统的描述及分析差分方程及其时域分析3.1.1 差分方程3.1.2 差分方程的解A递推解B古典解C Z变换求解Z变换3.2.1 Z变换的定义3.2.2 Z变换的性质3.2.3 Z反变换A长除法B留数法C部分分式法离散时间系统的Z域分析3.3.1 零输入响应3.3.2 零状态响应3.3.3 完全响应Z传递函数及其求法3.4.1 Z传递函数的定义3.4.2 离散系统的运算3.4.3 由G(s)求G(z)——连续时间系统的离散化A对G(s)的讨论B对离散化方法的评价C 留数法D直接代换法E系统等效法Ⅰ——冲击响应不变法;F系统等效法Ⅱ——阶跃响应不变法G部分分式法3.4.4 离散化方法小结线性离散时间系统的稳定性分析3.5.1 闭环极点与输出特性之间的关系3.5.2 稳定判据线性离散时间系统的频率特性分析法3.6.1 线性离散时间系统的频率特性3.6.2 线性离散时间系统的频率特性分析法第3章 线性离散系统的描述及分析 3.1 差分方程及其时域分析 3.1.1差分方程 在线性离散时间动态系统中,输入激励序列u (k )与输出响应序列y (k )之间的动态关系在时域中用差分方程来描述,差分方程一般写成升序方式1101101-1()(1)(1)()()(1)(1)()0(0),(1),...,(-1)n n m m n y k n a y k n a y k a y k b u k m b u k m b u k b u k k y y y y y n y m n--+++-++++==+++-++++≥===≤有始性:初始条件:时间因果律:或写成∑∑==-+--+=+m i nj j i j n k y a i m k u b n k y 01)()()(上式表明某一离散时间点上输出值可能与当前时间点上的输入值(当00,b m n ≠=)以及此前若干个输入和输出值有关。
推论开来,当前的输出值是“此前”全部激励和内部状态共同作用的“积累”效应。

一、概述在科学和工程领域,差分方程和离散时间系统模型的求解是非常常见和重要的问题。
差分方程是描述离散时间系统动态行为的数学模型,而z变换则是一种用于分析和求解差分方程的工具。
在matlab中,我们可以利用其强大的数值计算和符号计算功能来求解差分方程和进行z 变换分析,本文将介绍如何使用matlab来求解差分方程和进行z变换分析。
二、差分方程的matlab求解1. 差分方程的表示差分方程表示为:y(n) + a1*y(n-1) + a2*y(n-2) + ... + aN*y(n-N) = b0*x(n) +b1*x(n-1) + ... + bM*x(n-M)其中y(n)为系统的输出,x(n)为系统的输入,aN, aN-1, ..., a1, bM, bM-1, ..., b0为差分方程的系数。
2. 差分方程的matlab表示在matlab中,可以使用“filter”函数来求解差分方程。
该函数的用法为:y = filter(b, a, x)其中b为差分方程输出项的系数,a为差分方程输入项的系数,x为系统的输入。
该函数可以帮助我们求解差分方程,并得到系统的输出。
3. 示例假设有一个差分方程为:y(n) - 0.5*y(n-1) = x(n)其在matlab中的求解代码如下:输入信号x = randn(1, 100);系数b = 1;a = [1, -0.5];求解差分方程y = filter(b, a, x);通过以上代码,我们可以得到系统的输出y,从而求解了差分方程。
三、z变换和差分方程的关系1. z变换的定义z变换是一种用于分析和求解离散时间系统的工具,其定义为:Y(z) = Z{y(n)} = sum(y(n)*z^(-n), n=-inf to inf)其中Y(z)表示系统的z变换,y(n)表示系统的离散时间响应,z为复数变量。
2. z变换与差分方程的关系差分方程和z变换的关系可以表示为:Y(z) = H(z)X(z)其中Y(z)为系统的输出的z变换,H(z)为系统的传递函数的z变换,X(z)为系统的输入的z变换。
z变换积分差分全文共四篇示例,供读者参考第一篇示例:【z变换积分差分】是信号与系统分析中常用的三种重要方法,它们在数字信号处理和控制系统中起到关键作用。
本文将介绍和比较这三种方法的原理、特点和应用。
1. z变换z变换是一种离散时间信号的分析方法,它类似于拉普拉斯变换用于连续时间信号的分析。
z变换将离散信号变换为z域中的函数,其中z是一个复数变量。
通过z变换可以将差分方程表示为代数方程,从而方便进行信号的频域分析和系统设计。
在z变换中,信号x(n)的z变换定义为:X(z) = Σ(x(n) * z^(-n)), n = 0, 1, 2, ...其中X(z)是信号x(n)的z变换,n是离散时间序列。
z变换的性质包括线性性、时移性、频率移位性、共轭性等。
通过这些性质,可以方便地对信号和系统进行分析。
z变换在数字信号处理中应用广泛,例如数字滤波、频域分析、数字控制系统等都离不开z变换的支持。
2. 积分在信号与系统中,积分是一种对信号进行求和的操作,可以将连续信号或离散信号进行积分得到一个新的信号。
积分在信号处理和系统控制中有着重要的作用,能够实现信号的平滑、去噪和特征提取等功能。
对于连续信号,积分的定义为:∫f(t)dt积分算子常用于信号的平滑和去噪处理,可以消除信号中的高频组分和噪声,提取信号的低频特征。
在控制系统中,积分常用于实现系统的稳定性、误差消除和跟踪功能,是PID控制器中的一个重要组成部分。
3. 差分f(n+1) - f(n)差分算子常用于信号的导数计算、特征提取和系统建模等领域,可以实现信号的变化率和变化趋势的分析。
在数字信号处理中,差分算子也被广泛应用于信号去噪、特征提取、运动检测等领域,是数字图像处理和视频处理中的重要工具。
z变换、积分和差分是信号与系统分析中常用的三种方法,它们在数字信号处理和控制系统中有着重要作用。
通过对这三种方法的深入理解和灵活运用,可以实现信号处理和系统设计的高效和精确。
z变换求解差分方程例题
当我们求解差分方程时,可以使用Z 变换。
下面以一个简单的例子来说明如何使用Z 变
换求解差分方程。
假设我们有一个差分方程:y[n] - y[n-1] = x[n]
其中,y[n] 表示输出序列,x[n] 表示输入序列,n 表示时间索引。
现在,我们将以上方程进行Z 变换:Y(z) - z^(-1)Y(z) = X(z)
其中,Y(z) 和X(z) 分别表示Z 变换后的输出和输入序列。
将Y(z) 和X(z) 汇总,得到:Y(z) = X(z) / (1 - z^(-1))
现在,我们可以通过对Y(z) 进行逆Z 变换来求解差分方程。
首先,我们将Y(z) 展开为分式形式:Y(z) = X(z) / (1 - z^(-1)) = X(z) / (1 - 1/z) 然后,我们可以使用部分分式分解来简化表达式:Y(z) = X(z) / (1 - 1/z) = X(z) * z / (z - 1)
接下来,我们需要将Y(z) 逆变换为时间域的序列。
这可以通过查找Z 变换表格或使用Z 变换的逆变换公式来完成。
在这个例子中,逆变换公式告诉我们:y[n] = (z^n * X(z) * z / (z - 1))的逆变换
最后,我们需要将逆变换公式转化为时间域的表达式。
这可以通过查找逆变换表格或使用逆变换的公式来完成。
总结起来,如果要使用Z 变换求解差分方程,可以按照以下步骤进行操作:
.将差分方程进行Z 变换。
.将Z 变换后的表达式简化。
.使用逆变换公式将Z 变换的表达式转化为时间域的表达式。
.最后,得到差分方程的解析解。
z变换到差分方程z变换(Z-transform)是一种在数字信号处理中广泛应用的数学工具,用于将离散时间域中的信号转换为连续时间域中的信号,从而更方便地对信号进行分析与处理。
通常情况下,我们可以将差分方程(difference equation)通过Z变换来求解,从而得到其对应的Z变换函数(Z-transform function)。
具体地说,对于给定的差分方程:y(n) + a1*y(n-1) + a2*y(n-2) + ... + ak*y(n-k) = b0*x(n) + b1*x(n-1) + b2*x(n-2) + ... + bm*x(n-m)其中,y(n)和x(n)分别表示输出和输入信号在时间点n的取值,a1、a2、…、ak和b0、b1、…、bm为常数系数,k和m为差分方程的阶数。
我们可以通过将差分方程中的所有项进行变换,得到其对应的Z变换函数:Y(z) + a1*Y(z)*z^{-1} + a2*Y(z)*z^{-2} + ... + ak*Y(z)*z^{-k} =b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... + bm*X(z)*z^{-m}其中,Y(z)和X(z)分别表示输出和输入信号的Z变换函数,z^{-n}表示Z域中的时间延迟,也可以将其视为离散时间域中的退化因子,它对应的函数形式为z^{-n} = e^{-jwn},其中w为频率。
通过对上述等式进行变换和整理,我们可以将Y(z)和X(z)表示为如下形式:Y(z) = [b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... +bm*X(z)*z^{-m}] / [1 + a1*z^{-1} + a2*z^{-2} + ... + ak*z^{-k}]X(z) = [X(z) + X(z)*z^{-1} + X(z)*z^{-2} + ... + X(z)*z^{-m}] / [m0 + b1*z^{-1} + b2*z^{-2} + ... + bm*z^{-m}]其中,Y(z)表示差分方程的输出信号的Z变换函数,X(z)表示差分方程的输入信号的Z变换函数。
差分方程z 变换概述说明以及解释1. 引言1.1 概述差分方程是描述离散时间系统行为的重要数学工具。
在现实生活中,许多系统的变化是按照离散时间步骤进行的,例如数字信号处理、数字滤波、通信系统等。
而差分方程则可以描述这些系统在每个时间步骤上的状态和演变。
与此同时,z变换是一种重要的数学工具,用于分析离散信号和离散系统。
它将差分方程从时域(自变量是时间)转换到z域(自变量是复平面上的复数z),并且能够提供更加简洁和便于分析的表达形式。
本文将概述差分方程z变换的基本概念以及其在离散系统分析和设计中的应用。
我们将解释差分方程z变换过程,并讨论其优势和局限性。
最后,我们将总结主要观点和结论,并对未来发展提出展望和建议。
1.2 文章结构本文共分为五个部分:引言、差分方程z变换概述、解释差分方程z变换过程、差分方程z变换的优势与局限性以及结论和总结。
1.3 目的本文的目的是介绍差分方程z变换的基本概念和原理,并探讨其在离散系统分析和设计中的应用。
通过阐述z变换与时域之间的关系,传递函数和频率响应描述以及求解差分方程的步骤与方法,读者将能够理解并运用这一重要数学工具。
同时,我们还将提供对差分方程z变换优势与局限性的考察,以及对未来发展的展望和建议。
2. 差分方程z 变换概述:2.1 差分方程基础知识:差分方程是离散时间系统建模和分析中的重要工具,它可以描述离散时间的动态过程。
差分方程以递推关系式的形式表示系统的行为,其中当前时刻输出值与过去一段时间内输入值和输出值之间存在着数学上的关系。
2.2 z 变换介绍:z 变换是一种用于将差分方程从时域转换到复平面上的方法。
在信号处理领域中,z 变换常被用于对离散系统进行频域分析和设计数字滤波器。
z 变换将离散时间信号表示成复变量z 的函数,使得我们可以通过对复平面上的频率响应进行分析来理解系统的特性。
2.3 z 变换的应用领域:z 变换在许多领域都有广泛的应用。
在控制系统工程领域,z 变换可用于建立数字控制器模型、设计数字滤波器以及实现各种控制算法。
z变换零极点与差分方程零极点与差分方程一、引言在信号处理与控制系统中,零极点是一种重要的概念。
它们描述了系统的动态特性,并且在分析和设计系统时起着关键作用。
差分方程是描述离散时间系统行为的重要工具。
本文将探讨零极点与差分方程的基本概念、性质和应用。
二、零极点的概念1. 零点在z变换中,零点是使得系统的传递函数为零的根。
零点可以是实数或复数,反映了系统对输入信号的特定频率成分的响应情况。
零点的位置和数量决定了系统的频率特性。
2. 极点与零点类似,极点是使得系统的传递函数无穷大的根。
极点可以是实数或复数,反映了系统的稳定性和频率响应。
极点的位置和数量决定了系统的动态特性。
三、差分方程的定义与性质1. 差分方程的定义差分方程是描述离散时间系统行为的数学表达式。
它以递推方式表示系统的输入和输出之间的关系。
差分方程可以通过将连续时间系统的微分方程进行离散化得到。
2. 差分方程的性质差分方程具有线性性、时不变性、因果性和稳定性等基本性质。
线性性表明系统对输入信号具有叠加性质;时不变性表示系统的行为与时间无关;因果性要求系统的输出仅依赖于当前和过去的输入;稳定性要求系统的输出有界。
四、零极点与差分方程的关系1. 零极点与系统的传递函数系统的传递函数是描述系统输入和输出之间关系的函数。
它可以通过系统的零极点来表示。
零点对应传递函数的分子部分,极点对应传递函数的分母部分。
传递函数的零极点决定了系统的频率响应和稳定性。
2. 差分方程与系统的传递函数差分方程可以转化为z变换形式,从而得到系统的传递函数。
通过z变换,可以将差分方程中的差分算子转化为复变量z的函数。
这样,差分方程与零极点的关系就能够建立起来。
五、零极点与差分方程的应用1. 系统分析与设计通过分析系统的零极点分布,可以得到系统的频率响应和稳定性。
这对于系统的分析与设计非常重要。
例如,在控制系统设计中,可以通过调整零极点的位置来改变系统的动态特性和稳定性。
2. 信号处理与滤波在信号处理中,滤波是一种常见的应用。