数字滤波器设计步骤
- 格式:doc
- 大小:410.50 KB
- 文档页数:13
利用MATLAB设计巴特沃斯低通数字滤波器引言数字滤波器是数字信号处理中的重要组成部分,可以用于去除信号中的噪音和不需要的频率成分。
巴特沃斯滤波器是一种常见的数字滤波器,被广泛应用于信号处理领域。
本文将介绍如何利用MATLAB设计巴特沃斯低通数字滤波器,并给出详细的步骤和示例代码。
设计步骤利用MATLAB设计巴特沃斯低通数字滤波器主要包括以下步骤:1.设计滤波器的参数2.计算滤波器的传递函数3.绘制滤波器的幅频响应曲线4.通过频域图像观察滤波器的性能下面将分别介绍每个步骤的详细操作。
设计滤波器的参数巴特沃斯低通数字滤波器的参数包括截止频率和阶数。
截止频率决定了滤波器的通频带,阶数决定了滤波器的陡峭程度。
通过MATLAB的butter()函数可以方便地设计巴特沃斯低通数字滤波器。
该函数的参数为滤波器的阶数和截止频率。
示例代码如下:order = 4; % 阶数cutoff_freq = 0.4; % 截止频率[b, a] = butter(order, cutoff_freq);计算滤波器的传递函数通过设计参数计算得到滤波器的传递函数。
传递函数是一个复数,包括了滤波器的频率响应信息。
使用MATLAB的freqz()函数可以计算滤波器的传递函数。
该函数的参数为滤波器的系数b和a,以及频率取样点的数量。
示例代码如下:freq_points = 512; % 频率取样点数量[h, w] = freqz(b, a, freq_points);绘制滤波器的幅频响应曲线经过计算得到的传递函数能够提供滤波器的幅频响应信息。
通过绘制幅频响应曲线,可以直观地观察滤波器的频率特性。
使用MATLAB的plot()函数可以绘制滤波器的幅频响应曲线。
该函数的参数为频率点和传递函数的幅值。
示例代码如下:magnitude = abs(h); % 幅值plot(w/pi, magnitude);xlabel('归一化频率');ylabel('幅值');title('巴特沃斯低通数字滤波器幅频响应');通过频域图像观察滤波器的性能通过绘制滤波器的频域图像,可以直观地观察滤波器对不同频率的信号的响应情况。
数字信号处理实验报告-FIR滤波器的设计与实现在数字信号处理中,滤波技术被广泛应用于时域处理和频率域处理中,其作用是将设计信号减弱或抑制被一些不需要的信号。
根据滤波器的非线性抑制特性,基于FIR(Finite Impulse Response)滤波器的优点是稳定,易设计,可以得到较强的抑制滤波效果。
本实验分别通过MATLAB编程设计、实现、仿真以及分析了一阶低通滤波器和平坦通带滤波器。
实验步骤:第一步:设计一阶低通滤波器,通过此滤波器对波型进行滤波处理,分析其对各种频率成分的抑制效果。
为此,采用零极点线性相关算法设计滤波器,根据低通滤波器的特性,设计的低通滤波器的阶次为n=10,截止频率为0.2π,可以使设计的滤波器被称为一阶低通滤波器。
第二步:设计平坦通带滤波器。
仿真证明,采用兩個FIR濾波器組合而成的阻礙-提升系統可以實現自定義的總三值響應的設計,得到了自定義的總三值響應函數。
实验结果:1、通过MATLAB编程,设计完成了一阶低通滤波器,并通过实验仿真得到了一阶低通滤波器的频率响应曲线,证明了设计的滤波器具有良好的低通性能,截止频率为0.2π。
在该频率以下,可以有效抑制波形上的噪声。
2、设计完成平坦通带滤波器,同样分析其频率响应曲线。
从实验结果可以看出,此滤波器在此频率段内的通带性能良好,通带范围内的信号透过滤波器后,损耗较小,滞后较小,可以满足各种实际要求。
结论:本实验经过实验操作,设计的一阶低通滤波器和平坦通带滤波器具有良好的滤波特性,均已达到预期的设计目标,证明了利用非线性抑制特性实现FIR滤波处理具有较强的抑制滤波效果。
本实验既有助于深入理解FIR滤波器的设计原理,也为其他应用系统的设计和开发提供了指导,进而提高信号的处理水平和质量。
滤波器的模拟和数字滤波器设计技术滤波器是一种能够改变信号频谱的电路或系统。
它可以选择性地通过或者阻断特定频率的信号,以达到滤波的目的。
在现代电子系统中,滤波器扮演着至关重要的角色,被广泛应用于音频处理、通信系统以及图像信号处理等领域。
一、模拟滤波器设计技术模拟滤波器是一种基于模拟电路实现的滤波器。
它采用电阻、电容和电感等元件组成,能够处理连续时间的模拟信号。
模拟滤波器按照频率响应的不同可以分为低通、高通、带通和带阻滤波器。
1. 低通滤波器低通滤波器的频率响应在截止频率以下具有较小的衰减,用于将低频信号通过而滤除高频成分。
常见的低通滤波器有RC低通滤波器和Butterworth低通滤波器等。
设计低通滤波器的关键是确定截止频率和了解所需的衰减特性。
2. 高通滤波器高通滤波器在截止频率以上可以通过较小的衰减,而阻断低频信号。
常见的高通滤波器有RLC高通滤波器和Butterworth高通滤波器等。
高通滤波器的设计也需要确定截止频率和衰减特性。
3. 带通滤波器带通滤波器通过一定范围内的频率信号,而阻断其他频率范围的信号。
它由低通滤波器和高通滤波器串联而成,常见的带通滤波器有二阶和四阶Butterworth带通滤波器。
带通滤波器的设计需要确定通带和阻带的范围。
4. 带阻滤波器带阻滤波器在某一频率范围内具有较小的衰减,而在该范围之外的频率上具有较大的衰减。
它由低通滤波器和高通滤波器并联组成,常见的带阻滤波器有二阶和四阶Butterworth带阻滤波器。
带阻滤波器的设计需要确定通带和阻带的范围。
二、数字滤波器设计技术数字滤波器是一种使用数字算法实现的滤波器,能够对离散时间信号进行处理。
它通常采用差分方程或者快速傅里叶变换(FFT)等算法实现。
1. IIR数字滤波器IIR(Infinite Impulse Response)数字滤波器是一种递归型的数字滤波器。
它的频率响应特性可以通过极点和零点的位置来描述。
常见的IIR数字滤波器有巴特沃斯滤波器、切比雪夫滤波器和椭圆滤波器等。
FIR数字滤波器的设计与实现介绍在数字信号处理中,滤波器是一种常用的工具,用于改变信号的频率响应。
FIR (Finite Impulse Response)数字滤波器是一种非递归的滤波器,具有线性相位响应和有限脉冲响应。
本文将探讨FIR数字滤波器的设计与实现,包括滤波器的原理、设计方法和实际应用。
原理FIR数字滤波器通过对输入信号的加权平均来实现滤波效果。
其原理可以简单描述为以下步骤: 1. 输入信号经过一个延迟线组成的信号延迟器。
2. 延迟后的信号与一组权重系数进行相乘。
3. 将相乘的结果进行加和得到输出信号。
FIR滤波器的特点是通过改变权重系数来改变滤波器的频率响应。
不同的权重系数可以实现低通滤波、高通滤波、带通滤波等不同的滤波效果。
设计方法FIR滤波器的设计主要有以下几种方法:窗函数法窗函数法是一种常用简单而直观的设计方法。
该方法通过选择一个窗函数,并将其与理想滤波器的频率响应进行卷积,得到FIR滤波器的频率响应。
常用的窗函数包括矩形窗、汉宁窗、哈密顿窗等。
不同的窗函数具有不同的特性,在设计滤波器时需要根据要求来选择合适的窗函数。
频率抽样法频率抽样法是一种基于频率抽样定理的设计方法。
该方法首先将所需的频率响应通过插值得到一个连续的函数,然后对该函数进行逆傅里叶变换,得到离散的权重系数。
频率抽样法的优点是可以设计出具有较小幅频纹波的滤波器,但需要进行频率上和频率下的补偿处理。
最优化方法最优化方法是一种基于优化理论的设计方法。
该方法通过优化某个性能指标来得到最优的滤波器权重系数。
常用的最优化方法包括Least Mean Square(LMS)法、Least Square(LS)法、Parks-McClellan法等。
这些方法可以根据设计要求,如通带波纹、阻带衰减等来得到最优的滤波器设计。
实现与应用FIR数字滤波器的实现可以通过硬件和软件两种方式。
硬件实现在硬件实现中,可以利用专门的FPGA(Field-Programmable Gate Array)等数字集成电路来实现FIR滤波器。
数字滤波器的软件设计流程IIR数字滤波器设计原理:IIR数字滤波器是通过因果稳定的Ha(s)映射成因果稳定的H(z),即s平面的左半平面必需映射到z平面单位圆的内部。
H(z)的频率响应能仿照Ha(s)的频率响应,即s平面的虚轴必需映射到z平面的单位圆上。
变换前后的滤波器在时域或频域的主要特征(频率响应或单位冲激响应等)应尽可能相同或临近。
将传输函数Ha(s)从s平面转换到z平面的办法有多种,主要有冲激不变法和双线性变换法。
假如不考虑混叠现象,利用冲击不变法实现的数字滤波器会很好地重临原模拟滤波器的频率特性。
而且数字滤波器的单位脉冲响应彻低仿照模拟滤波器的单位冲激响应,时域特性靠近好。
在本设计中,用冲激函数作为系统激励信号,用各种数字滤波器作为测试系统。
冲激函数具有无限宽广的频谱,用冲激函数做激励信号相当于对测试系统输入全部频率的信号,系统必定有对应的输出。
用Transfer函数计算出系统输出与输入的傅立叶变换之比,从而得到系统的频率响应函数。
LabVIEW程序由两部分组成:前面板程序和框图程序。
囫囵程序基于多线程设计,即前面板和系统程序各占用一个线程。
前面板是用户接口,即交互式界面,用于用户向程序中输入各种控制参数和观看输出量。
在前面板中,用法了各种图标,如开关、旋钮等,并以数字或实时趋势图等各种形式的输出测试结果来模拟真切仪器的面板。
通过信号经过巴特沃斯和切比雪夫带通滤波器以后的波形和信号经过贝塞尔和椭圆带通滤波器以后的波形。
程序包含有两个模块,即两个case结构:一个用来实现频率响应测试;另一个用来模拟从混有高频噪声的信号数据中提取正弦波。
因为滤波器对信号的分析要求循环举行,而囫囵过程都希翼是人为控制的,因此框图程序里需要一个While循环结构。
模块一:频率响应测试模块。
频率响应测试时采纳冲激函数做激励信第1页共2页。

脉冲响应不变法设计iir数字滤波器以脉冲响应不变法设计IIR数字滤波器引言:数字滤波器在信号处理领域起着重要的作用,而设计滤波器的方法也有很多种。
其中一种常用的方法是脉冲响应不变法(Impulse Invariance Method),它是一种将模拟滤波器转化为数字滤波器的方法。
本文将介绍脉冲响应不变法的基本原理和步骤,并以一个实例进行说明。
一、脉冲响应不变法的基本原理脉冲响应不变法的基本原理是通过保持模拟滤波器和数字滤波器的单位脉冲响应相等,来实现滤波器的转换。
具体而言,将模拟滤波器的单位脉冲响应与采样脉冲序列进行卷积,得到数字滤波器的单位脉冲响应。
这样可以保持滤波器的频率响应特性在一定程度上保持一致。
二、脉冲响应不变法的步骤1. 确定模拟滤波器的传递函数H(s),并将其转化为零极点形式。
2. 对传递函数进行低通化处理,即将其映射到单位圆内部,以避免数字化后的频率混叠。
3. 进行离散化处理,即将连续时间变为离散时间。
这里常用的方法是将模拟滤波器的传递函数中的s替换为z,其中z为复平面上的离散点。
4. 对离散化后的传递函数进行归一化处理,确保单位圆上频率为π的点的模为1。
5. 对归一化后的传递函数进行因子化,消除传递函数中的公共因子。
6. 根据因子化后的传递函数,可以得到数字滤波器的差分方程,即数字滤波器的单位脉冲响应。
三、实例分析为了更好地理解脉冲响应不变法的应用,我们以一个二阶低通滤波器为例进行分析。
假设模拟滤波器的传递函数为H(s),经过前述步骤转化为数字滤波器的差分方程为:y[n] = b0*x[n] + b1*x[n-1] + b2*x[n-2] - a1*y[n-1] - a2*y[n-2]其中,b0、b1、b2为数字滤波器的前馈系数,a1、a2为数字滤波器的反馈系数。
根据传递函数的零极点分解,我们可以得到数字滤波器的差分方程的系数。
具体计算步骤如下:1. 求解传递函数的零点和极点,得到模拟滤波器的零极点分解形式。
数字滤波器的原理和设计方法数字滤波器是一种用于信号处理的重要工具,其通过对输入信号进行滤波操作,可以去除噪声、改变信号频谱分布等。
本文将介绍数字滤波器的原理和设计方法,以提供对该领域的基本了解。
一、数字滤波器的原理数字滤波器是由数字信号处理器实现的算法,其原理基于离散时间信号的滤波理论。
离散时间信号是在离散时间点处取样得到的信号,而数字滤波器则是对这些取样数据进行加工处理,从而改变信号的频谱特性。
数字滤波器的原理可以分为两大类:时域滤波和频域滤波。
时域滤波器是通过对信号在时间域上的加工处理实现滤波效果,常见的时域滤波器有移动平均滤波器、巴特沃斯滤波器等。
频域滤波器则是通过将信号进行傅里叶变换,将频谱域上不需要的频率成分置零来实现滤波效果。
常见的频域滤波器有低通滤波器、高通滤波器等。
二、数字滤波器的设计方法数字滤波器的设计是指根据特定的滤波要求来确定相应的滤波器参数,以使其能够满足信号处理的需求。
下面介绍几种常见的数字滤波器设计方法。
1. IIR滤波器设计IIR滤波器是指具有无限长单位响应的滤波器,其设计方法主要有两种:一是基于模拟滤波器设计的方法,二是基于数字滤波器变换的方法。
基于模拟滤波器设计的方法使用了模拟滤波器的设计技术,将连续时间滤波器进行离散化处理,得到离散时间IIR滤波器。
而基于数字滤波器变换的方法则直接对数字滤波器进行设计,无需通过模拟滤波器。
2. FIR滤波器设计FIR滤波器是指具有有限长单位响应的滤波器,其设计方法主要有窗函数法、频率采样法和最优化法。
窗函数法通过选择不同的窗函数来实现滤波器的设计,常见的窗函数有矩形窗、汉宁窗、海明窗等。
频率采样法则是基于滤波器在频率域上的采样点来设计滤波器。
最优化法是通过将滤波器设计问题转化为一个最优化问题,使用数学优化算法得到最优解。
3. 自适应滤波器设计自适应滤波器是根据输入信号的统计特性和滤波器自身的适应能力,来实现对输入信号进行滤波的一种方法。
实验五、双线性变换法设计IIR 数字滤波器一、实验目的:1、熟悉用双线性变换法设计IIR 数字滤波器的原理与方法。
2、掌握数字滤波器的计算机仿真方法。
3、熟悉Batterworth 滤波器设计方法及特点 二、实验原理(一)、IIR 数字滤波器的设计步骤:① 按照一定规则把给定的滤波器技术指标转换为模拟低通滤波器的技术指标; ② 根据模拟滤波器技术指标设计为响应的模拟低通滤波器;③ 跟据脉冲响应不变法和双线性不变法把模拟滤波器转换为数字滤波器;④ 如果要设计的滤波器是高通、带通或带阻滤波器,则首先把它们的技术指标转化为模拟低通滤波器的技术指标,设计为数字低通滤波器,最后通过频率转换的方法来得到所要的滤波器。
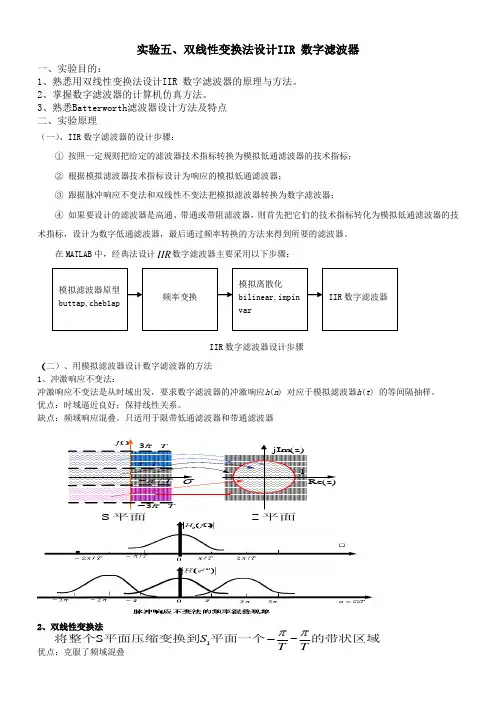
在MATLAB 中,经典法设计IIR 数字滤波器主要采用以下步骤:IIR 数字滤波器设计步骤(二)、用模拟滤波器设计数字滤波器的方法 1、冲激响应不变法:冲激响应不变法是从时域出发,要求数字滤波器的冲激响应h (n ) 对应于模拟滤波器h (t ) 的等间隔抽样。
优点:时域逼近良好;保持线性关系。
缺点:频域响应混叠。
只适用于限带低通滤波器和带通滤波器2、双线性变换法优点:克服了频域混叠模拟滤波器原型 buttap,cheb1ap频率变换 模拟离散化 bilinear,impin varIIR 数字滤波器/Tπ/T π-3/Tπ3/Tπ-j ΩσjIm (z)Re(z)1S 平面Z 平面1S ~S T Tππ-将整个平面压缩变换到平面一个的带状区域缺点:高频时会引起畸变1)冲激响应不变法impinvar格式:[BZ,AZ]= impinvar (B,A,Fs )功能:把具有[B,A]模拟滤波器传递函数模型转换为采样频率为Fs 的数字滤波器的传递函数模型[BZ,AZ],Fs 默认值为1。
例:一个4阶的Butterworth 模拟低通滤波器的系统函数如下:12251)(234++++=s s s s s H a试用冲激响应不变法求出Butterworth 模拟低通数字滤波器的系统函数。
数字低通滤波器设计数字低通滤波器是一种常用的信号处理工具,它可以滤除高频信号,保留低频信号。
本文将介绍数字低通滤波器的设计原理和方法。
我们需要了解数字低通滤波器的概念。
数字低通滤波器是一种能够通过对信号进行差分和加权运算,滤除高频成分的滤波器。
它是由一系列的延时元件和加权系数组成的,其中延时元件用于延时输入信号,加权系数用于调整输入信号的幅度。
通过合理设计延时元件和加权系数,可以实现对输入信号的低频成分的保留和高频成分的滤除。
在数字低通滤波器的设计中,有两个重要的参数需要考虑:截止频率和滤波器阶数。
截止频率是指滤波器开始滤除高频信号的频率,通常用赫兹(Hz)表示。
滤波器阶数是指滤波器的复杂度,阶数越高,滤波器的性能越好,但计算复杂度也越高。
设计数字低通滤波器的方法有很多种,下面介绍两种常用的方法:脉冲响应法和频率抽样法。
脉冲响应法是一种基于时域的设计方法。
该方法的基本思想是通过对理想低通滤波器的脉冲响应进行采样和截断,得到数字低通滤波器的脉冲响应。
具体步骤如下:首先,选择一个适当的滤波器阶数和截止频率。
然后,根据截止频率和采样频率的关系,计算出滤波器的截止频率在离散频率上的位置。
接下来,根据理想低通滤波器的脉冲响应公式,得到理想低通滤波器的脉冲响应序列。
最后,将脉冲响应序列与窗函数相乘,得到数字低通滤波器的脉冲响应。
频率抽样法是一种基于频域的设计方法。
该方法的基本思想是通过对理想低通滤波器的频率响应进行抽样和截断,得到数字低通滤波器的频率响应。
具体步骤如下:首先,选择一个适当的滤波器阶数和截止频率。
然后,根据截止频率和采样频率的关系,计算出滤波器的截止频率在离散频率上的位置。
接下来,根据理想低通滤波器的频率响应公式,得到理想低通滤波器的频率响应曲线。
最后,根据截止频率在离散频率上的位置,对频率响应曲线进行截断,得到数字低通滤波器的频率响应。
在设计数字低通滤波器时,还需要考虑滤波器的稳定性和实现的复杂度。
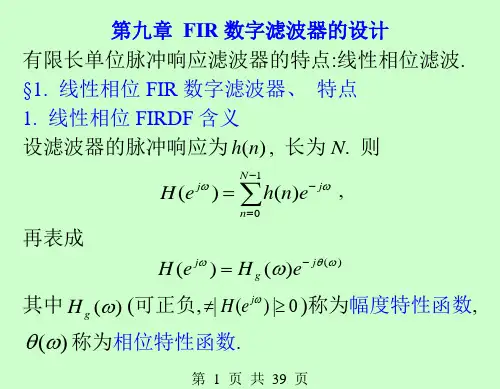
第九章 FIR 数字滤波器的设计有限长单位脉冲响应滤波器的特点:线性相位滤波. §1. 线性相位FIR 数字滤波器、 特点 1. 线性相位FIRDF 含义设滤波器的脉冲响应为()h n , 长为N . 则10()()N j j n H e h n e ωω--==∑,再表成()()()j j g H e H e ωθωω-=其中()g H ω(可正负,|()|0j H e ω≠≥)称为幅度特性函数,()θω称为相位特性函数.注: 不是 arg[()]()()j j j j H e H e H e e ωωω=如4()()x n R n =的3/2sin(2)()sin(/2)j j X e e ωωωω-=它的()g H ω为sin(2)sin(/2)ωω, ()θω为32ω.若()θωωτ=-,τ是与采样点数N 有关的常数,则称滤波器是线性相位的.系统的群时延定义为:()d ()/d τωθωω=-. 对线性相位滤波器, 群时延是常数.2. 线性相位的条件(1) ()h n 的特点 设滤波器是线性相位的, 则应有10()()()N j j n j g n H e h n e H e ωωωτω---===∑即1()(cos sin )()(cos sin )N gn h n n j n Hj ωωωωτωτ-=-=-∑从而有1010()cos ()cos ()sin ()sin N g n N g n H h n n H h n nωωτωωωτω-=-===∑∑上面二式相除且整理为11()cos sin ()sin cos N N n n h n n h n n ωωτωωτ--===∑∑移项化简为1()sin ()0N n h n n ωτ-=-=∑求得一种情形:当()sin ()h n n ωτ-关于12N τ-=奇对称时,上式为零. ()h n ⇒是偶对称的. 即满足()(1),01h n h N n n N =--≤≤-.此时()(1)/2N θωω=--.在()h n 偶对称的条件下, 再分13N = 和 12N =(2) ()g H ω的特点数学推导见参考文献[1], 下面只给出结论. 当N 是奇数时,0 612-0.100.10.25 611-0.10.10.2(1)/2111()2cos 22N g n N N H h h n n ωω-=--⎛⎫⎛⎫=+- ⎪ ⎪⎝⎭⎝⎭∑当N 是偶数时,(1)/2111()2cos 22N g n N H h n n ωω-=-⎛⎫⎛⎫=-- ⎪ ⎪⎝⎭⎝⎭∑所以在()h n 偶对称的条件下, 滤波器有两种形式0.51 1.5200.5100.51 1.52-1-0.500.5113N =12N =(对13=N ,是低通滤波器, 可转换成高通,带通,带阻滤波器)(对12=N 也是低通滤波器,但不可转换成高通,带阻滤波器).(3) 零点分布特点 (()h n 偶对称) 110()()(1)----====--∑∑N N nn n n H z h n zh N n z1(1)(1)1()()N N m Nm h m z z H z -------===∑ 由此可得, 对0k z ≠, 若()0=k H z , 则1()0-=kH z .由()h n 是实数列, 得()H z 是实系数的, 所以, 有三种情形的零点. 例如 hn=[1 3 5 3 1]; zplane(hn,1);(4) 极点均在0z =, 且为1N -阶的, 系统必稳定. 因为 11()[(0)(1)]/N N H z h z h N z --=++-.(5)网络结构特点由()h n 对(1)/2=-n N 的对称性, 推得 当N 为偶数时,-101-1-0.50.514Real PartI m a g i n a r y P a r t/21(1)0()()[]N nN n n H z h n zz -----==+∑当N 为奇数时,1(1)/21(1)21()()[]2N N nN n n N H z h n z zh z--------=-⎛⎫=++ ⎪⎝⎭∑例如当4=N 时,1(3)0()()[]---==+∑n n n H z h n z z312(0)[1](1)[]---=+++h z h z z . 可有如下网络结构.直接型 省了2个乘法器当5=N 时, 情形类似, 见书P185. §2 用窗函数设计FIR 数字滤波器 线性相位的FIR 时域要求是()h n 对称性. 本节讨论如何在幅频特性上逼近期望滤波器.1-z()y n ()x n 1z -(0)h 1z -1z -(1)h (2)h (3)h ()x n ()y n (0)h (1)h 1-z 1-z以低通为例. 设()j d H e ω, 则-1()()d 2=⎰j j n d h n H e e πωωπωπ ()j d H e ω一般为片断函数, 故()d h n 无限长,需处理.1. 基本方法(1) 提出希望频率响应函数 线性相位, 具有片断特点, 即||()0||-⎧≤⎪=⎨<≤⎪⎩j j cd ce H e ωτωωωωωπ(2) 算出O0.25-π|()|j d H e ω0.25πω1π-π-1()()d 2=⎰j j nd h n He e πωωπωπ1d 2--=⎰c cj j ne e ωωτωωωπ s i n (())()-=-c n n ωτπτ(无限长)(3) 加窗()w n ,长N , 得()()()=d h n h n w n (*)要线性相位, 就要()h n 关于(1)/2-N 偶对称, 而()d h n 关于τ偶对称, 故要求10203000.510102030-0.100.10.20.3(1)/2=-N τ所以要求()w n 关于(1)/2=-N τ偶对称.10203000.51102030-0.10.10.20.3再回过来检验()j H e ω是否满足精度要求.1230.51O0.25-π|()|j d H e ω0.25πω1π-π()j H e ω00.51⇒若基本满足, 则依截取的()h n , 制硬件, 编软件.2. 窗函数法的性能分析由(*)式知, 取点一样时, 逼近性质与窗形(值)有关. 下面分析当()()=N w n R n 时的频率性质. 由()()()=d R h n h n w n , 得1()()()2=*j j j d R H e H e W e ωωωπ(1)/2s i n (/2)()F T [()]s i n (/2)--==j j N R RN W e w n e ωωωω()-=j j Rg W e e ωωτ. 其中sin(/2)()sin(/2)=j Rg N W e ωωω,12-=N τ. 代入卷积()1()()()d 2--=⎰j j j d R H e H e W e πωθωθπθπ ()1()e ()e d 2---=-⎰j j dg Rg H W πθτωθτπθωθθπ1e ()()d 2--=-⎰j dg Rg H W πωτπθωθθπ1e ()()2-=*j dg Rg H W ωτωωπ()e ()=j g H θωω,故1()()()2=*g dg Rg H H W ωωωπ,(1)()2--=N ωθω. 相位是线性的. 实际幅度=希望幅度*窗函数幅度. 卷积=对每个ω, 求一积分, 其值记为()g H ω.故有如下图形演示.O -c ω()dg H θωθ1π-πcω-2.5-2-1.5-1-0.50.511.52-100102030θO2/Nπ2/-N π()dg W θ2Nπ⨯主瓣宽度2/Nπ旁瓣宽度2/右图为当/4,31c N ωπ==时,|()||()|j g H H e ωω=的幅频图.阻带最小衰减21dB, 一般不 满足实际工程需要.-1.5-1-0.50.51 1.50.51w-...+147697764.69733060586876851814058 cos(.50000000000000000000000000000000 w)23-2.5-2-1.5-1-0.500.511.52-100102030O ()dg H θc ωω=θ1π-π()-Rg W ωθO|()/(0)|dg dg H H ωω122/B N∆π=⨯加窗后滤波器过渡带宽窗函数的频域主瓣宽00.250.40.60.81-80-60-40-200≈过渡带宽0.13过渡带宽4/310.414/310.13π≈=⇔=(归一化), 这可以通过增加N 来减小. 这是窗函数设计的一个 指标. 3.典型窗函数下面给出各种窗函数的表达式、时域波形、幅度特性,以及理想滤波器加窗后的波形和幅度特性. 以下均设低通滤器(e )j d H ω的/2,31c N ωπ==. (1) 矩形窗()R N w R n =, 已求得sin(/2)()sin(/2)=j Rg N W e ωωω,12-=N τ矩形波形 矩形波形的幅频特性1020300.5100.51-60-40-200%矩形窗时域波形N=31; w=rectwin(N);n=0:30;subplot(1,2,1); stem(n,w);axis([0 33 0 1.3]);grid on ; %矩形窗频域特性[hw,w]=freqz(w,1);subplot(1,2,2);13dBn α=-旁瓣峰值plot(w/pi,20*log10(abs(hw)/abs(hw(1)))); axis([0 1 -60 0]);grid on;pause;%理想滤波器加窗后采样序列wc=pi/2;N=31;n=0:30;t=(N-1)/2;hdn=sin(wc*(n-t))./(pi*(n-t));hdn(16)=0.5;%补点;subplot(1,2,1);stem(n,hdn);axis([0 33 -0.2 0.8]);grid on; %滤波器加窗后的频域特性[hw,w]=freqz(hdn,1);subplot(1,2,2);plot(w/pi,20*log10(abs(hw)/abs(hw(1)))); axis([0 1 -60 8]);grid on;理想滤波器时域采样 加窗后滤波器的频率特性102030-0.200.20.40.600.51-60-40-20过渡带宽度4/31,B ∆π=最小衰减21dB s α=-. 当21,31,63N =时矩形窗的幅频特为0.10.2-50-40-30-20-10000.10.2-50-40-30-20-10000.10.2-50-40-30-20-1004/B N ∆π=与N 成反比, 要改21dB s α=-,需另选.(2) 三角窗(Bartlett Window)21012()212112B n N n N w n n N n N N -⎧≤≤⎪⎪-=⎨-⎪-<≤-⎪-⎩2(1)/22sin(/4)(e )esin(/2)j j N B N W N ωωωω--⎡⎤=⎢⎥⎣⎦22sin(/4)()sin(/2)B N W N ωωω⎡⎤=⎢⎥⎣⎦01020300.5100.51-100-50-250102030-0.200.20.40.600.51-40-20各指标为:25dB,2(4/),25db n s B N α∆πα=-==-. (3) 升余弦窗(汉宁窗, hanning window)2()0.51cos ()1hn N n w n R n N π⎡⎤⎛⎫=- ⎪⎢⎥-⎝⎭⎣⎦,010203000.5100.51-100-50102030-0.200.20.40.600.51-80-60-40-200各指标为:31dB,2(4/),44db n s B N α∆πα=-==-(4) 改进升余弦窗(海明窗, hanning window)2()0.540.46cos ()1hm N n w n R n N π⎡⎤⎛⎫=- ⎪⎢⎥-⎝⎭⎣⎦, 41dB,2(4/),53db n s B N α∆πα=-==-01020300.5100.51-100-50102030-0.200.20.40.600.51-80-60-40-200(5) 布莱克曼窗(blackman window)24()0.420.5cos 0.08coscos ()11bl N n n w n R n N N ππ⎡⎤⎛⎫⎛⎫=-+ ⎪ ⎪⎢⎥--⎝⎭⎝⎭⎣⎦, 01020300.5100.51-100-60102030-0.200.20.40.600.51-100-50各指标为: 57dB,2(6/),74db n s B N α∆πα=-==-.为便于选择使用, 将5种窗函数基本参数列于下表.类型 窗函数的 旁瓣峰值n α过渡带宽度B ∆加窗后滤波器的 阻带最小衰减s αrectwin -13 4π/N -21 bartlet 三角 -25 8π/N -25 hanning -31 8π/N -44 hamming -41 8π/N -53 blackman-5712π/N-74如阻带最小衰减60dB s α≥,过渡带宽度0.1B ∆π≤. 则选布莱克曼窗, 且由12/0.1N ππ≤, 得120N =. 事实上, 还有很多窗形可供选择. 见P193. 4.设计步骤(1) 由阻带指标选窗型w , 由过渡带宽度选点数N , (2) 构造要逼近的()j d H e ω, 构造c ω(对低通)应使()(0)/26dB g c g H H ω≈⇔(3) 计算-1()()d 2j j n d d h n H e e πωωπωπ=⎰ (4) 加窗()()()d h n h n w n =.例1 用窗函数法设计线性相位高通FIRDF, 指标为 通带截止频率:/2p ωπ=; 通带最大衰减:1dB p α=. 阻带截止频率:/4s ωπ=;阻带最小衰减:40dB s α=解(1)根据阻带指标, 可选汉宁和海明窗, 我们选海明窗, 由84p s B N ππ∆ωω=≤-=, →32N ≥, 对高通滤波器, 必须取奇数33N =.故有 33()0.540.46cos ()16hm n w n R n π⎡⎤⎛⎫=- ⎪⎢⎥⎝⎭⎣⎦. (2) 16τ=,/229/66c p B ωω∆π=-=, 则要逼近()00j j c d ce H e ωτωωωπωω-⎧≤≤=⎨≤<⎩(全通-低通) 1O πωp ωs ω|()|j H e ω(3) 求()d h n sin(())sin(())()()c n n n n ωτπτπτπτ--=--- 2966sin[()](16)()n n n πτδπτ-=---表示全通滤波器 低通滤波器 (4) 加窗 ()()()d h n h n w n =(见书, 略) 上述过程可用Matlab 中的命令fir1来实现. 格式1: hn=fir1(N,wc,’ftype ’,window(N+1)); ftype 可选high, stop; window 窗名, 默认hamming. 格式2: hn=fir1(N,wc); 阶数为N, 6dB 截止频率wc16()FT[(16)]j j H en eωωδ-=-=(0~1)的低通滤波器.(注h(n)的长度为N+1)当wc=[wc1,wc2]时, 为带通滤波器.例如上例的命令为(注设计时,对 作归一化)wc=29/66; N=32;%N=h(n)的长度-1hn=fir1(N,wc, 'high'); subplot(1,2,1);n=0:32; stem(n,hn);axis([0 32 -0.4 0.6]);grid on; [hw,w]=freqz(hn,1); subplot(1,2,2);plot(w/pi,20*log10(abs(hw)));axis([0 1 -80 5]);grid on; 注对高通,带阻,阶数必须为偶数.102030-0.4-0.200.20.400.51-80-60-40-200例2 用窗函数法设计一个FIR 带通滤波器, 指标为 阻带下截止频率:0.2ls ωπ=;阻带最小衰减60dB s α= 通带下截止频率:0.35lp ωπ=;通带最大衰减1dB p α= 通带上截止频率:0.65up ωπ=; 阻带上截止频率:0.8us ωπ=;解 由阻带衰减指标, 选blackman 窗, 由过度带宽120.350.20.15lp ls B Nπ∆ωωπππ=≤-=-=, 得80N =, 通带区间约定用c ω表示, 计算如下,22c lp up B B ∆∆ωωωπ⎡⎤=-+⎢⎥⎣⎦程序命令为wls=0.2*pi;wlp=0.35*pi;wup=0.65*pi; B=wlp-wls; N=ceil(12*pi/B); wp=[wlp/pi-6/N,wup/pi+6/N];hn=fir1(N-1,wp,blackman(N));subplot(1,2,1); n=0:79; stem(n,hn); axis([0 80 -0.4 0.4]);grid on;[hw,w]=freqz(hn,1);subplot(1,2,2); plot(w/pi,20*log10(abs(hw))); axis([0 1 -100 5]);grid on;20406080-0.4-0.200.20.400.20.40.60.81-100-80-60-40-200例3 用窗函数法设计FIR 低通滤波器, 实现对模拟信号采样后进行数字低通滤波, 对模拟信号的指标通带截止频率:2kHz p f =; 阻带截止频率:3kHz s f =;阻带最小衰减:40dB s α=;采样频率:10kHz s F =. 选合适窗函数, 求出()h n ,并画出幅频衰减曲线和相频特性曲线.解 (1) 转换成数字频率为 通带数字截止频率:240000.410000p p sf F ππωπ===;阻带数字截止频率: 260000.610000s s s f F ππωπ===;阻带最小衰减:40dB;过渡带宽度:0.2s p B ωωπ=-=.(2) 由衰减:40dB, 选hamming 窗, 由8N B π≤,得840N B N π≥⇒=.(3) 确定/20.40.10.5c p B ωωπππ=+=+=, 命令如下:fp=2000;fs=3000;Fs=10000; wp=2*pi*fp/Fs;ws=2*pi*fs/Fs;B=ws-wp;N=ceil(8*pi/B);wc=(wp+B/2)/pi; hn=fir1(N-1,wc);n=0:N-1;subplot(1,2,1);stem(n,hn,'.'); grid on; [hw,w]=freqz(hn,1); subplot(1,2,2);plot(w/pi,20*log10(abs(hw)));grid on; axis([0 1 -100 4]);0.20.40.60.81-100-80-60-40-200010203040-0.200.20.40.6w=-2.2:0.01:2.2;wg=sin(31*w/2)./sin(w/2);wg(221)=31;plot(w,wg);axis([-2.5 2.2 -10 32]);%理想滤波器的频域特性.ezplot(int('sin((w-x)*16)/sin((w-x)/2)/6.28',-pi/4,pi/4),[-1.7 1.7]);加窗后的幅度函数的频域特性.附录1对称性数据P183n13=0:1:12;%P183h13=[-0.05 -0.03 0 0.08 0.16 0.25 0.28 0.25 0.16 0.08 0 -0.03 -0.05]; subplot(1,2,1);stem(n13,h13);axis([0 13 -0.1 0.3])n12=[0:1:11];h12=[-0.05 -0.03 0 0.08 0.16 0.25 0.25 0.16 0.08 0 -0.03 -0.05]; subplot(1,2,2);stem(n12,h12);axis([0 13 -0.1 0.3])2对称性数据P186N=31;n=0:30;hd=sin(0.25*pi*(n-15))./(pi*(n-15));hd(16)=0.25;subplot(1,2,1);stem(n,ones(1,N));axis([0 31 0 1.3]); subplot(1,2,2);stem(n,hd);axis([0 31 -0.1 0.3]);plot(n,hd); axis([0 30 -0.1 0.27]); %wc=0.25pi加图hk=fft(hd,128); k=0:63; plot(k/64*pi,abs(hk(1,1:64)));axis([0 pi 0 1.1])。
数字滤波器的设计方法与实现数字滤波器是一种用于信号处理的重要工具,它可以消除信号中的噪音和干扰,提高信号的质量和可靠性。
本文将介绍数字滤波器的设计方法与实现,并探讨一些常用的数字滤波器类型。
一、数字滤波器的基本原理和作用数字滤波器可以将满足一定数学规律的输入信号通过一系列运算,输出满足特定要求的信号。
其基本原理是对输入信号进行采样和量化,然后利用滤波算法对采样后的信号进行处理,最后通过重构输出滤波后的信号。
数字滤波器的作用主要有两个方面。
首先,它可以实现降低信号中噪音和干扰的功效,提高信号的质量。
其次,数字滤波器还可以提取信号中特定频率成分,并对信号进行频率选择性处理,从而满足特定的信号处理需求。
二、数字滤波器的设计方法1. 滤波器的类型选择数字滤波器的类型选择根据实际信号处理需求。
常见的数字滤波器类型包括有限冲激响应(FIR)滤波器和无限冲激响应(IIR)滤波器。
FIR滤波器的特点是稳定性好、幅频特性易于设计;IIR滤波器的特点是具有较高的处理效率和较窄的幅频特性。
2. 设计滤波器的幅频特性幅频特性描述了滤波器对输入信号幅度的影响。
常见的幅频特性包括低通、高通、带通和带阻。
根据实际需求,设计出合适的幅频特性。
设计幅频特性的方法有很多,包括窗口法、最佳近似法和频率变换法等。
3. 计算滤波器的系数滤波器系数是用于实现滤波器算法的关键参数。
根据所选的滤波器类型和幅频特性,可以通过不同的设计方法计算出滤波器的系数。
常见的设计方法包括巴特沃斯法、切比雪夫法和椭圆法等。
4. 实现滤波器算法滤波器算法的实现可以采用直接形式或间接形式。
直接形式基于滤波器的数学模型,通过块图或框图实现算法。
间接形式则是通过差分方程或状态空间方程描述滤波器,并利用计算机进行模拟和实现。
三、数字滤波器的应用实例数字滤波器广泛应用于各个领域,包括音频、图像、通信和生物医学等。
以音频处理为例,数字滤波器可以用于音频降噪、音频特效和音频编解码等。
基于Vhdl的数字滤波器设计与实现1. 引言数字滤波器是数字信号处理中常用的一种技术,用于去除信号中的噪声、滤波和频率选择等应用。
本文将基于VHDL语言进行数字滤波器的设计与实现,通过详细介绍设计步骤和实现方法,探讨数字滤波器在信号处理中的重要性和应用。
2. 数字滤波器概述2.1 数字滤波器基本原理数字滤波器是通过对信号进行采样、离散化和处理来实现对频率特性进行调整的装置。
它可以将输入信号分为不同频率分量,并选择性地增强或抑制特定频率范围内的信号。
2.2 数字滤波器分类根据不同的设计方法和特性,数字滤波器可以分为FIR(有限脉冲响应)和IIR(无限脉冲响应)两种类型。
FIR是一种线性相位系统,它具有稳定性、线性相位特性以及较好的抗混叠能力;而IIR则具有较高的阶数、更好地逼近能力以及更小的计算复杂度。
3. VHDL语言在数字滤波器设计与实现中的应用3.1 VHDL语言概述VHDL(VHSIC Hardware Description Language)是一种硬件描述语言,广泛应用于数字电路设计和硬件系统描述。
它提供了一种结构化的设计方法,可以方便地描述数字滤波器的结构和功能。
3.2 VHDL在数字滤波器设计中的优势VHDL语言具有高度的可重用性、可维护性和可扩展性,可以方便地进行模块化设计和系统级设计。
同时,VHDL还提供了丰富的模拟功能,可以进行仿真验证和调试。
4. 数字滤波器设计方法4.1 数字滤波器需求分析在进行数字滤波器设计之前,首先需要明确应用场景、滤波需求以及系统性能指标。
根据信号特点、频率范围以及抗噪能力等因素,选择合适的滤波器类型。
4.2 数字滤波器结构选择根据需求分析结果和具体应用场景,在FIR和IIR两种类型中选择合适的结构。
FIR常用于需要线性相位特性、抗混叠能力较强以及较简单实现等场景;而IIR则适合于需要更高阶数、更好逼近能力以及更小计算复杂度的场景。
4.3 数字滤波器设计流程数字滤波器设计流程包括滤波器结构设计、滤波器参数计算、系统级仿真验证和实际实现等步骤。
XX XX 大学XXXX设计说明书学院、系:专业:学生姓名:学号:设计题目:FIR数字带通滤波器设计起迄日期: 20**年2月13日~20**年6月10日指导教师:教授系主任:发任务书日期:20**年1月7日目录目录 (1)摘要 (II)Abstract ........................................................................................................................ I II 1 原理说明.. (1)1.1 数字滤波技术 (1)1.2 FIR滤波器 (2)1.3 窗函数 (2)2 数字滤波器设计 (3)2.1 滤波器设计标准 (3)2.2 设计函数的选取 (3)2.3 窗函数介绍 (4)2.4 设计步骤 (6)2.5 设计方法 (7)3 滤波器测试 (13)3.1 滤波器滤波性能测试 (14)3.2 滤波器稳定性测量 (16)3.3 滤波器时延测量 (15)4 心得体会 (18)5 参考文献.................................................................................. 错误!未定义书签。
附件一:. (18)附件二: (20)摘要现代图像、语声、数据通信对线性相位的要求是普遍的。
正是此原因,使得具有线性相位的FIR数字滤波器得到大力发展和广泛应用。
数字滤波器是一种用来过滤时间离散信号的数字系统,通过对抽样数据进行数学处理来达到频域滤波的目的。
根据其单位冲激响应函数的时域特性可分为两类:无限冲激响应(IIR)滤波器和有限冲激响应(FIR)滤波器。
与IIR滤波器相比,FIR的实现是非递归的,总是稳定的;更重要的是,FIR滤波器在满足幅频响应要求的同时,可以获得严格的线性相位特性。
因此,它在高保真的信号处理,如数字音频、图像处理、数据传输、生物医学等领域得到广泛应用。
fir数字滤波器的设计与实现一、引言数字滤波器是数字信号处理中的重要组成部分,它可以用于去除信号中的噪声,平滑信号等。
其中,fir数字滤波器是一种常见的数字滤波器。
本文将介绍fir数字滤波器的设计与实现。
二、fir数字滤波器概述fir数字滤波器是一种线性相位、有限脉冲响应(FIR)的数字滤波器。
它通过一系列加权系数对输入信号进行卷积运算,从而实现对信号的过滤。
fir数字滤波器具有以下特点:1. 稳定性好:由于其有限脉冲响应特性,使得其稳定性优于IIR(无限脉冲响应)数字滤波器。
2. 线性相位:fir数字滤波器在频域上具有线性相位特性,因此可以保持输入信号中各频率分量之间的相对时延不变。
3. 设计灵活:fir数字滤波器可以通过改变加权系数来实现不同的频率响应和截止频率。
三、fir数字滤波器设计步骤1. 确定需求:首先需要确定所需的频率响应和截止频率等参数。
2. 选择窗函数:根据需求选择合适的窗函数,常用的有矩形窗、汉明窗、布莱克曼窗等。
3. 计算滤波器系数:利用所选窗函数计算出fir数字滤波器的加权系数。
常见的计算方法有频率采样法、最小二乘法等。
4. 实现滤波器:将计算得到的加权系数应用于fir数字滤波器中,实现对信号的过滤。
四、fir数字滤波器实现方法1. 直接形式:直接将计算得到的加权系数应用于fir数字滤波器中,实现对信号的过滤。
该方法简单易懂,但是需要大量运算,不适合处理较长的信号序列。
2. 快速卷积形式:利用快速傅里叶变换(FFT)来加速卷积运算。
该方法可以大大减少计算量,适合处理较长的信号序列。
五、fir数字滤波器应用案例1. 语音处理:fir数字滤波器可以用于去除语音信号中的噪声和杂音,提高语音质量。
2. 图像处理:fir数字滤波器可以用于图像去噪和平滑处理,提高图像质量。
3. 生物医学信号处理:fir数字滤波器可以用于生物医学信号的滤波和特征提取,如心电信号、脑电信号等。
六、总结fir数字滤波器是一种常见的数字滤波器,具有稳定性好、线性相位和设计灵活等优点。
FIR 数字滤波器设计7.1.2 FIR 数字滤波器设计方法 FIR 滤波器设计方法: (1)窗函数法 (2)频率采样法 (3)切比雪夫逼近法1. 窗函数法的设计步骤与要点设()()[]n h FT e H d j d =ω为希望逼近的频响特性函数,()()[]n h FT e H j d =ω为用窗函数法设计的实际滤波器的频响函数。
通常取()ωj e H 相应的理想频响特性作为()ωj de H 。
窗函数法设计过程如图7.1所示。
知识要点如下:(1)希望逼近的理想滤波器频响函数()ωj d e H 的表达式。
因为FIR 数字滤波器一般要求设计成线性相位特性,所以()ωj d e H 必须满足上述线性相位FIR 滤波器的频域特点。
逼近理想低通、带通、高通和带阻滤波器频响函数的表达式如下:()⎪⎩⎪⎨⎧≤<≤≤=-πωωωωωαωc c j j dLp e e H ,00, ()⎪⎩⎪⎨⎧≤<≤<≤≤=-πωωωωωωωωαωch cl ch cl j j dBp e e H ,0,0,()⎪⎩⎪⎨⎧≤<≤≤=-cc j j dHp e e H ωωπωωωαω0,0,()⎪⎩⎪⎨⎧≤<≤≤≤≤=-chcl ch cl j j dBs e e H ωωωπωωωωωαω,0,0, 其中,c ω为理想滤波器截止频率,cl ω和ch ω分别为理想带通滤波器的通带下截止频率和上截止频率。
()21-=N α(N 为()n h 长度),这样才能确保线性相位的时域条件()()n N h n h --=1,且()n h 为实序列。
表7.1 六种窗函数的基本参数N 值。
(3)检验设计结果(4)熟悉窗函数设计法的特点:设计过程简单、方便实用。
但边界频率不易精确控制所以设计完以后,必须检验结果。
2. 用频率采样法设计FIR 数字滤波器的设计步骤与要点1)频率采样设计法的概念及理论依据设计FIR 数字滤波器就是寻求一种满足设计要求的滤波器单位脉冲响应()n h 或系统函数()z H 。
1 / 13 数字信号处理 数字滤波器的设计
学院 计算机与电子信息学院 专业 电子信息科学与技术 班级 电子15-2 班 姓名 学号 指导教师 刘利民 2 / 13
数字滤波器的设计 一、模拟低通滤波器的设计方法 1、Butterworth滤波器设计步骤: ⑴。确定阶次N ① 已知Ωc、Ωs和As求Butterworth DF阶数N
由: 22110lg()10lg1(/)NscAHjsas
求出N:/10lg(101)2lg(/)sscAN ② 已知Ωc、Ωs和Ω=Ωp(3dBp)的衰减Ap 求Butterworth DF阶数N
/10lg(101)2lg(/)pApNNc得到:
③ 已知Ωp、Ωs和Ω=Ωp的衰减Ap 和As 求Butterworth DF阶数N 由 22110lg()10lg1(/)NpcAHjpap /10/1022(/)101,(/)101psAANNpcsc则: 3 / 13
/10/10lg[(101)(101)]2l(/):gsPAApsNN求出 ⑵.用阶次N确定 ()aHs 根据公式:
2s2=1121[]2221|(|=()(),01(/)(1)(),1,2,2aaaNcjkjNNkccHjHsHssjsjekN)令分母,得 ()()aaHsHs在左半平面的极点即为()aHs的极点,因而
1()()NcsNkkHsss 121[]22kjNkcse ,1,2,,kN 2、切比雪夫低通滤波器设计步骤: ⑴.确定技术指标p p s s 归一化: /1ppp /ssp ⑵.根据技术指标求出滤波器阶数N及: 1111()schkNch 其中 0.1110.1101101spk 0.12101 p ⑶.求出归一化系统函数 其中极点由下式求出: 4 / 13
11/(21)(21)sin[]cos[]221()2()()()piaNNiiaapskkpshjchNNHpppHsHp
或者由N和S直接查表得()aHp ⑷.去归一化: ()aaapsHsHpH()= 二、数字低通滤波器的设计步骤: 1、 确定数字低通滤波器的技术指标:通带截止频率p、通带最大衰减系数p、阻带截止频率、阻带最小衰减系数s。 2、 将数字低通滤波器的技术指标转换成模拟低通滤波器的技术指标。 巴特沃斯:
/10lg(101)2lg(/)pApNNc
得到:
1()()NcsNkkHsss
切比雪夫:/ssp 0.12101 p
1111()schkNch
其中0.1110.1101101spk
()aaapsHsHpH()= 5 / 13
3、把模拟滤波器变换成数字滤波器,即把模拟滤波器的系数)(SH映射成数字滤波器的系统函数)(zH。
实现系统传递函数s域至z域映射有脉冲响应不变法和双线性映射两种方法. (1)脉冲响应不变法。 按照技术要求设计一个模拟低通滤波器,得到模拟低通滤波器的传输函数sH
a
转换成数字低通滤波器的系统函数H(z)。
设模拟滤波器的传输函数为sHa,相应的单位冲激响应是tha,sHa=LT[tha],LT[.]代表拉氏变换,对tha进行等间隔采样,采样间隔为T,得到nTha,将h(n)= nTha作为数字滤波器的单位取样响应,那么数字滤波器的系统函数H(z)便是h(n)的Z变换.因此脉冲响应不变法是一种时域上的转
换方法,它是h(n)在采样点上等于tha。
设模拟滤波器sHa只有单阶极点,且分母多项式的阶次高于分子多项式的阶次,将sHa用部分分式表示:
NiiiassAsH1 ,式中is为sHa的单阶极点。
将sHa逆拉氏变换得到tha: )(1tueAthtsNiiai
,式中u(t)是单位阶跃函数。
对tha进行等间隔采样,采样间隔为T,得到: )()(1nTueAnThnhnTsNiiai 6 / 13
对上式进行Z变换,得到数字滤波器的系统函数H(z):
NiTsizeAzHi111
,
经过一系列变换得到:
)(1)(skaezjksHTzHsT
(2)双线性变换法 这种变换方法,采用非线性频率压缩方法,将整个频率轴上的频率范围压缩到±π/T之间,再用sTez转换到z平面上.设Ha(s),s=jΩ,经过非线性频率压缩后用Ha(s1),1s=jΩ1表示,这里用正切变换实现频率压缩:
TT15.0tan2
式中T仍是采样间隔,当Ω1从-π/T经过0变化到π/T时,Ω则由-∞经过0变化到+∞,实现了s平面上整个虚轴完全压缩到1s平面上虚轴的±π/T之间的转换。这样便有
tsTszzTTthTs111125.021
再通过sTez 转换到z平面上,得到:
11112zz
Ts
7 / 13
sTsTz22 令jezjs, ,有
jjeeTj
112
21tan2T
两种方法比较: 脉冲响应不变法的优点: 1,模拟频率到数字频率的转换时线性的; 2,数字滤波器单位脉冲响应的数字表示近似原型的模拟滤波器单位脉冲响应,因此时域特性逼近好。
缺点: 会产生频谱混叠现象,只适合带限滤波器 双线性变换法优点: 克服多值映射得关系,可以消除频率的混叠 缺点: 时域到频域的变换是非线性的,在高频处有较大的失真。
三、数字高通滤波器的设计步骤: ① 数字高通滤波器的技术指标为:通带截止频率ωp 阻带截止频率ωs 8 / 13
通带衰减频率 阻带衰减频率 2/ppswfF 2/ssswfF
② 预畸变处理,将数字高通指标转换为模拟低通指标
2cot()2sswT 2cot()2ppwT
④ 确定阶数N 由1010lg((101)(101))2lg()atspN (可由模拟低通滤波器设计方法可得()aHs)
④ 归一化及去归一化 查表令s=s/Ω 归一化模拟低通圆型系统函数
⑤ 低通向高通转化 令s1=1/s 由频率变换公式 即可得 ⑥ 滤波器数字化 令1-1-z-1z12sT 利用双线性变换化 带入数据可得数字高通H(z)
数字高通不能采用脉冲响应不变法原因是:脉冲响应不变法有频谱周期延拓效应,因此只能用于带限的频响特性,如衰减特性很好的低通或带通。而高频衰9 / 13
减越大,频响的混淆效应越小,至于高通滤波器,由于它们在高频部分不衰减,因此将完全混淆在低频响应中.
四、数字带通滤波器的设计: 步骤: (1) 确定性能指标: 在设计带通滤波器之前,首先根据工程实际的需要 确定滤波器的技术指标:通带截止频率wc1,wc2、阻带截止频率wr1,wr2、阻带最小衰减αs通带最大衰减αp
(2) 对带通数字滤波器H(z)的数字边界频率预畸变
得到带通模拟滤波器H(s)的边界频率 主要是通带截止频率ωp1,ωp2;阻带截止频率ωs1,ωs2的转换。 对双线性变换法一般T=2s 通带截止频率wc1=(2/T)*tan(wp1/2) 、wc2=(2/T)*tan(wp2/2) 阻带截止频率wr1=(2/T)*tan(ws1/2)、wr2=(2/T)*tan(ws2/2) 阻带最小衰减αs 通带最大衰减αp (3)低通到带通频率变换
将模拟带通滤波器指标转换为模拟低通滤波器指标。 10 / 13
B=wc2-wc1 normwr1=(((wr1^2)-(w0^2))/(B*wr1)) normwr2=(((wr2^2)-(w0^2))/(B*wr2)) normwc1=(((wc1^2)-(w0^2))/(B*wc1)) normwc2=(((wc2^2)—(w0^2))/(B*wc2)) 模拟低通滤波器指标: normwc,normwr,αp,αs (4)设计模拟低通原型滤波器.查表得到归一化低通传输函数G(p):
用模拟低通滤波器设计方法(由巴特沃斯设计步骤或切比雪夫设计步骤)得到模拟低通滤波器的传输函数Ha(s)
(5)模拟低通滤波器转化为模拟带通滤波器。ﻫ)(202)()(lusspapGsH (6)利用双线性变换法将模拟带通滤波器Ha(s)转换成数字带通滤波器H(z)
由1-1-z-1z12sT 11112202)(zzslussp 得到 也可以用脉冲响应不变法:)(1)(skaezjksHTzHsT 两种方法比较比较: