东北大学2014自控真题及解答
- 格式:doc
- 大小:624.50 KB
- 文档页数:7
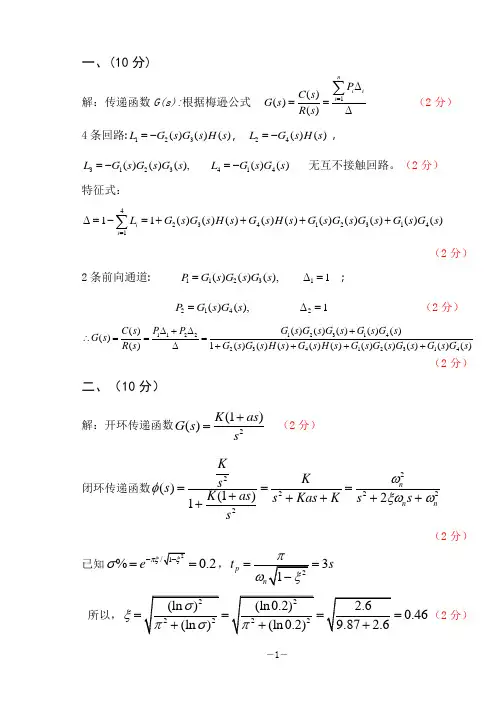
一、(10分)解:传递函数G(s):根据梅逊公式 1()()()ni ii P C s G s R s =∆==∆∑ (2分) 4条回路:123()()()L G s G s H s =-, 24()()L G s H s =-,3123()()(),L G s G s G s =- 414()()L G s G s =- 无互不接触回路。
(2分) 特征式:423412314111()()()()()()()()()()i i L G s G s H s G s H s G s G s G s G s G s =∆=-=++++∑(2分)2条前向通道: 11231()()(), 1P G s G s G s =∆= ;2142()(), 1P G s G s =∆= (2分)12314112223412314()()()()()()()()1()()()()()()()()()()G s G s G s G s G s PP C s G s R s G s G s H s G s H s G s G s G s G s G s +∆+∆∴===∆++++(2分)二、(10分)解:开环传递函数2(1)()K as G s s+=(2分) 闭环传递函数222222()(1)21n n n KK s s K as s Kas K s s s ωφξωω===++++++(2分)已知%0.2eπξσ-==,3p t s ==所以,0.46ξ====(2分)K,a 分别为:21.4n K ω==, (2分)2 1.090.781.4n a K ξω=== (2分) 三、 (14分)解:(1)Ⅰ型系统在跟踪单位斜坡输入信号时,稳态误差为 1ss ve K =(2分) 而静态速度误差系数 0(0.51)lim ()()lim (1)(21)v s s K s K s G s H s s K s s s →→+=⋅=⋅=++ (2分)稳态误差为 11ss v e K K==。
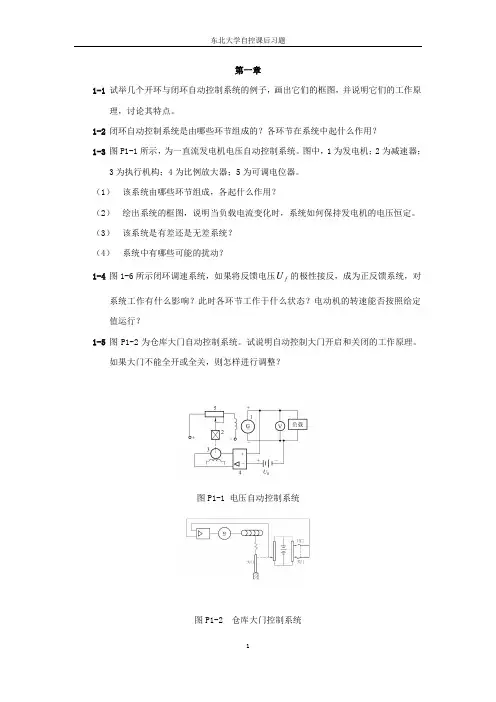
1-1试举几个开环与闭环自动控制系统的例子,画出它们的框图,并说明它们的工作原理,讨论其特点。
1-2闭环自动控制系统是由哪些环节组成的?各环节在系统中起什么作用?1-3图P1-1所示,为一直流发电机电压自动控制系统。
图中,1为发电机;2为减速器;3为执行机构;4为比例放大器;5为可调电位器。
(1)该系统由哪些环节组成,各起什么作用?(2)绘出系统的框图,说明当负载电流变化时,系统如何保持发电机的电压恒定。
(3)该系统是有差还是无差系统?(4)系统中有哪些可能的扰动?U的极性接反,成为正反馈系统,对1-4图1-6所示闭环调速系统,如果将反馈电压f系统工作有什么影响?此时各环节工作于什么状态?电动机的转速能否按照给定值运行?1-5图P1-2为仓库大门自动控制系统。
试说明自动控制大门开启和关闭的工作原理。
如果大门不能全开或全关,则怎样进行调整?图P1-1 电压自动控制系统图P1-2 仓库大门控制系统2-1 试求出图P2-1中各电路的传递函数。
图P2-12-2 试求出图P2-2中各有源网络的传递函数。
图P2-22-3 求图P2-3所示各机械运动系统的传递函数。
(1)求图(a )的 ()()?=s X s X r c (2)求图(b )的()()?=s X s X r c (3)求图(c )的()()?12=s X s X (4)求图(d )的 ()()?1=s F s X图P2-32-4 图P2-4所示为一齿轮传动机构。
设此机构无间隙、无变形,求折算到传动轴上的等效转动惯量、等效粘性摩擦系数和()()()s M s s W 2θ=。
图P2-4 图P2-52-5 图P2-5所示为一磁场控制的直流电动机。
设工作时电枢电流不变,控制电压加在励磁绕组上,输出为电机角位移,求传递函数()()()s u s s W r θ=。
2-6 图P2-6所示为一用作放大器的直流发电机,原电机以恒定转速运行。
试确定传递函数()()()s W s U s U r c =,设不计发电机的电枢电感和电阻。
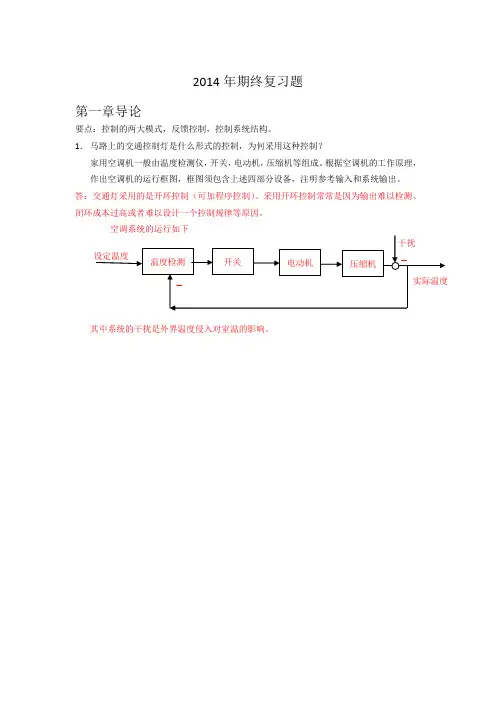
2014年期终复习题第一章导论要点:控制的两大模式,反馈控制,控制系统结构。
1.马路上的交通控制灯是什么形式的控制,为何采用这种控制?家用空调机一般由温度检测仪,开关,电动机,压缩机等组成。
根据空调机的工作原理,作出空调机的运行框图,框图须包含上述四部分设备,注明参考输入和系统输出。
答:交通灯采用的是开环控制(可加程序控制)。
采用开环控制常常是因为输出难以检测、闭环成本过高或者难以设计一个控制规律等原因。
其中系统的干扰是外界温度侵入对室温的影响。
第二章:控制系统的数学模型要点:三种模型,传递函数。
方框图化简,信号流图和Mason 公式。
2. 有一系统方框图如下,(1)作出系统的信号流图;(2)求出系统的特征式;(3)求C (s )。
答:(1)(2)这里共有四个圈: e d f g C b e →→→→→→e df h b e →→→→→e d h b e →→→→h bh →→1233124214411G G G H G G G H G G G H ∆=+++-(3)12341312421441(1)(1)()(),()()G G G G H G G G G H G G G H C s C s R s N s -++-==∆∆可得C (s )。
本题注意点是12∆∆,不是1。
)RCed第三章时域分析要点:性能指标,误差系数,Routh 判据,欠阻尼二阶系统的计算。
3. 有单位反馈控制系统,前向传递函数为 。
(1)如果要求M p <10%,求K 的取值范围;(2)取K 实现M p =10%,时的值,输入为 的稳态误差;(3)取K 同(2),求输入为sin 2t 的稳态误差。
答:10()( 2.5)KG s s s =+。
2 2.5n n ωζω=(1)0.1p M e ==,得0.59ζ=,要求M p <10%,就是0.59ζ>。
得到04490.K <<。
(2)取0.449K =,开环增益为1.796,系统为1型,所以 1.796v K =,位置误差为0,输入为()32tr t =-+时的稳态误差为0.278。
东北大学考试试卷(B 卷)2008—2009 学年第 1 学期 课程名称: 自动控制原理 一、(10分)简要回答下列问题(每小题各5分)。
1. 简述自动控制系统一般是由那些基本环节组成,并画出控
制系统结构框图。
2. 简述什么是无差系统。
得分
二、(10分)控制系统如图1所示,其中)(s W c 为补偿校正装置,
试求该系统扰动误差传递函数)()(s N s X c ,并从理论上说明如何设计补偿校正装置)(s W c 可以使系统补偿后的扰动误差为零。
图1 题二图
得分
三、(10分)已知某三阶单位负反馈系统具有一个有限零点为
1.5-,三个极点分别为6.1
2.1j ±-和 1.49-,且系统传递函数根的
形式放大系数为4。
试求系统在单位阶跃函数作用下,系统的动态性能指标超调量%σ、调整时间5s t ±(%)和峰值时间m t 。
得分
四、(14分)设单位负反馈系统的开环传递函数为
)
2)(1()(++=
s s s k s W g
k
1. 绘制闭环系统根轨迹(写出具体绘制过程并标出关键点); 2. 试确定系统呈单调动态响应以及衰减振荡动态响应的g k 取
值范围。
得分
r
五、(20分)一单位负反馈最小相位系统的开环对数幅频特性
如图2所示,其中虚线为校正前特性,实线为加入串联校正装置后的特性。
1. 试写出串联校正装置的传递函数,并说明此校正主要是利
用该装置的什么特性;
2. 求校正后系统的相位裕量()c γω。
图2 题五图
得分。
自动控制原理:参考答案及评分标准一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为(C)A. 系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在(A )上相等。
A. 幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为(C)A.比较元件B.给定元件C.反馈元件D.放大元件4. 3从0变化到时,延迟环节频率特性极坐标图为(A )A.圆B.半圆C椭圆 D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个(B )A.比例环节B.微分环节C.积分环节D.惯性环节6.若系统的开环传递函数为10s(5s 2)则它的开环增益为(A.1B.2C.5D.107.二阶系统的传递函数G(s)5~2s 2s 5则该系统是(A.临界阻尼系统B.欠阻尼系统8. 若保持二阶系统的Z不变,提咼3n,A.提高上升时间和峰值时间C.提高上升时间和调整时间9. 一阶微分环节G(s) 1 Ts,当频率A. 45 °B.-45°10. 最小相位系统的开环增益越大,其(A.振荡次数越多C. 过阻尼系统D.零阻尼系统则可以(B )B. 减少上升时间和峰值时间D. 减少上升时间和超调量卡时,则相频特性G(j )为(A )C. 90 °D.- 90°D )B. 稳定裕量越大D. 稳态误差越小11设系统的特征方程为D s s4 8s3217s 16s 50,则此系统(A )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12某单位反馈系统的开环传递函数为: G ss(s 1)(s 5),当k= ( C )时,闭环系统临界稳定。
B.20 C.30 D.4013.设系统的特征方程为Ds 3s310s 5s2s 2 0,则此系统中包含正实部特征的个数有(C )A.0B.1C.2D.316.稳态误差e ss 与误差信号E (s )的函数关系为(B )A.(-3,x )B.(0宀)C.(- x ,-3)D.(-3,0)20.在直流电动机调速系统中,霍尔传感器是用作( B )反馈的传感器。
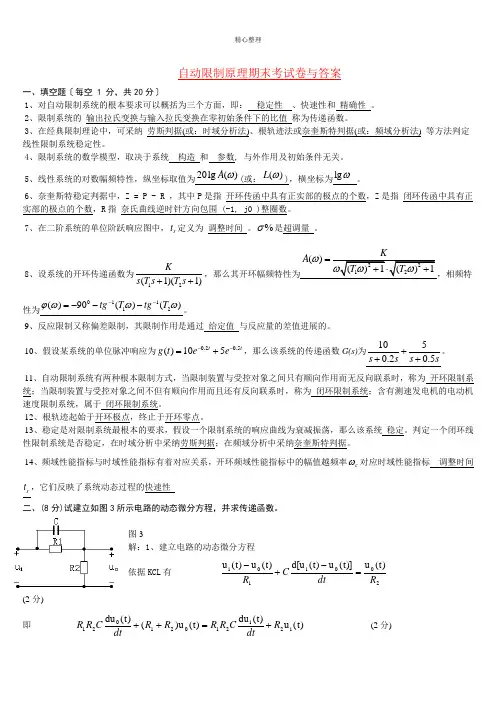
自动限制原理期末考试卷与答案一、填空题〔每空 1 分,共20分〕1、对自动限制系统的根本要求可以概括为三个方面,即: 稳定性 、快速性和 精确性 。
2、限制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典限制理论中,可采纳 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判定线性限制系统稳定性。
4、限制系统的数学模型,取决于系统 构造 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。
6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++,那么其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反应限制又称偏差限制,其限制作用是通过 给定值 与反应量的差值进展的。
10、假设某系统的单位脉冲响应为0.20.5()105tt g t ee --=+,那么该系统的传递函数G(s)为1050.20.5s s s s+++。
11、自动限制系统有两种根本限制方式,当限制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环限制系统;当限制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环限制系统;含有测速发电机的电动机速度限制系统,属于 闭环限制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对限制系统最根本的要求,假设一个限制系统的响应曲线为衰减振荡,那么该系统 稳定。
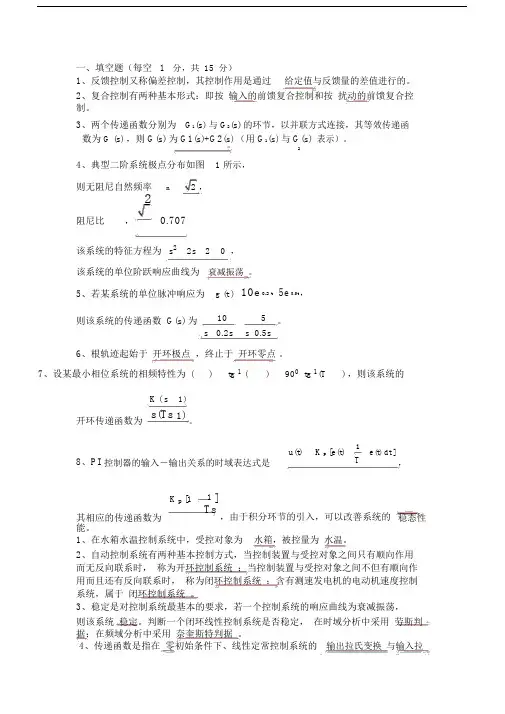
一、填空题(每空 1 分,共 15 分)1、反馈控制又称偏差控制,其控制作用是通过 给定值与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 输入的前馈复合控制和按 扰动的前馈复合控制。
3、两个传递函数分别为 G 1(s) 与 G 2(s) 的环节,以并联方式连接,其等效传递函数为 G (s) ,则 G(s) 为 G1(s)+G2(s) (用 G 1(s) 与 G(s) 表示)。
24、典型二阶系统极点分布如图 1 所示,则无阻尼自然频率 n2 ,2阻尼比 ,0.707该系统的特征方程为 s 2 2s 2 0 ,该系统的单位阶跃响应曲线为 衰减振荡 。
5、若某系统的单位脉冲响应为 g (t ) 10e 0.2 t 5e 0.5t ,则该系统的传递函数 G(s) 为10 5 。
0.2ss 0.5s s6、根轨迹起始于 开环极点 ,终止于 开环零点 。
7、设某最小相位系统的相频特性为 ()tg 1 ()900 tg 1(T) ,则该系统的K ( s 1)开环传递函数为s(Ts1)。
8、PI控制器的输入-输出关系的时域表达式是u(t)K p [e(t)1Te(t) dt ],K p [11 ]稳态性 其相应的传递函数为Ts,由于积分环节的引入,可以改善系统的 能。
1、在水箱水温控制系统中,受控对象为 水箱,被控量为 水温。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时, 称为开环控制系统 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时, 称为闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统 。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
判断一个闭环线性控制系统是否稳定, 在时域分析中采用 劳斯判据;在频域分析中采用 奈奎斯特判据 。
4、传递函数是指在 零初始条件下、线性定常控制系统的 输出拉氏变换 与输入拉氏变换之比。
东北大学考试试卷(A闭卷)2014—2015学年第一学期课程名称:自动控制原理②一、简答题(每题3分,共12分)(1)简要描述一个设计合理的闭环系统的中频段形状。
(2)系统的稳态误差与哪些因素有关?如何减小系统的稳态误差?(3)已知一个最小相位系统有二个闭环极点,其实部分别为:-σ1=-2;-σ2=-30,哪一个极点对系统动态响应过程的影响大,为什么?(4)系统校正方法有哪些?二、分析题(每题8分,共8分)试画出人从书架上取书的负反馈控制系统方框图,并简述其工作过程。
三、计算题(每题10分,共10分)已知串联滞后校正无源阻容电路如图1所示,写出电路的传递函数和频率特性,并绘制其对数频率特性。
四、计算题(每题10分,共10分)一闭环反馈控制系统的动态结构图如图2所示。
(1)试求当δ%≤20%、t s(5%)=1.8s时,系统的参数K1及τ值。
(2)试求上述系统的位置误差系数K p、速度误差系数K v、加速度误差系数K a及其相应的稳态误差。
五、分析计算题(每题10分,共10分)已知负反馈控制系统开环零、极点分布如图3所示。
(1)试写出开环传递函数;(2)绘制所对应负反馈系统的概略根轨迹(给出过程);(3)分析增加开环零点对轨迹形状及系统性能有什么影响?六、计算题(每题10分,共6分)已知最小相位系统开环对数幅频特性如图4所示。
(1)试写出其传递函数;(2)求相位裕度及增益裕度;(3)判断闭环系统的稳定性。
七、综合题(每题10分,共10分)设一最小相位系统K=50时的幅相频率特性如图5所示,试分析确定使系统闭环稳定的K的取值范围。
学习中心:奥鹏远程教育宁波学习中心(直属)[24] 院校学号:C07574011930013 姓名应铖榕
东北大学继续教育学院
自动控制原理试卷(作业考核线上2) A 卷(共 3 页)
1、自动控制系统由哪些基本环节组成?各环节的功能是什么?(10分)
答:
(1)控制对象或调节对象——要进行控制的设备或过程。
(2)执行机构——一般由传动装置和调节机构组成。
执行机构直接作用于控制对象,使被控制量达到所要求的数值。
(3)检测装置或传感器——该装置用来检测被控制量,并将其转换为与给定量相同的物理量。
(4)给定环节——设定被控制量的给定值的装置。
(5)比较环节——将所检测的被控制量与给定量进行比较,确定两者之间的偏差量。
(6)中间环节——一般包括比较环节和校正环节。
2、传递函数适合哪类控制系统?如何定义?(10分)
答:传递函数适合线性连续系统。
定义:零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比。
3、通常有哪几种减小稳态误差的途径?(10分)
答:
(1)增大系统开环增益或扰动之前系统的前向通道增益。
(2)在系统的前向通道或主反馈通道设置串联积分环节。
(3)采用串级控制抑制内回路扰动。
课程名称:自动控制原理 1。
(03 A 卷)1.(10分)下图所示电路,求)()()(s U s U s W r C =。
2.(10分)下图所示系统,求)()()(s X s X s W r C =。
二.(15分)已知一单位负反馈系统的单位阶跃响应曲线如下图所示,求系统的闭环传递函数。
三.(15分)已知单位负反馈系统的开环传函为()3222)(ss s K s W k ++= (1) 画出系统根轨迹(关键点要标明)。
(2) 求使系统稳定的K 值范围,及临界状态下的振荡频率。
四.(15分)设系统开环传函为()()111)(-+=s Ts s W k τ,试分别大致画出τ<T ,τ=T, τ>T三种情况下的奈氏图。
五.(20分)(1)已知一最小相位系统开环的对数幅频特性如下图所示,试写出系统开环传递函数()s W k ,计算相位裕量PM 和增益裕量GM 。
(2)若系统原有的开环传递函数为()()21.01100ss s W +=,而校正后的对数幅频特性如下图所示,求串联校正装置的传递函数。
六.(5分)画出两个常见的非线性元件的特性。
七.(10分)求解差分方程 ()()()()t k f k f k f δ=++-+2132 其中,初始条件:()00=f ,()01=f ;输入条件:()⎩⎨⎧≠=∞=000t t t δ(03 B 卷)2.(10分)下图所示系统,求)()()(s N s X s W C =。
二.(15分)已知系统如下图所示,求系统的单位阶跃响应,并判断系统的稳定性。
三.(15分)已知系统如下图所示,(3) 画出系统根轨迹(关键点要标明)。
(4) 求使系统稳定的K 值范围,及临界状态下的振荡频率。
四.(15分)设系统开环传函为()()11)(-+=s Ts Ks W k τ,画出当K>1时的奈氏曲线(分τ<T ,τ=T, τ>T 三种情况),并判断系统的稳定性。
五.(20分)已知一系统原有的特性为()()21.01100ss s W +=,校正装置的特性为()()()11.0101.0125.0+++=s s s s W c ,(1) 画出原系统和校正装置的对数幅频特性。
东北大学智慧树知到“电气工程及其自动化”《自动控制原理Ⅰ》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共10题)1.在闭环系统中,除了输入量对输出量产生控制作用外,输出量不参与系统的控制,因而闭环系统不具有抗干扰能力。
()A.正确B.错误2.在典型二阶系统中,()时为临界阻尼状态。
A.ξ>1B.0C.ξ=1D.ξ=03.若系统的稳态误差不为零,则称为有差系统。
()A.是B.否4.最大超调量越大,说明系统过渡过程越不平稳。
()A.是B.否5.上升时间反映了系统的()。
A.稳定性B.快速性C.平稳性D.准确性6.只有给定量是自动控制系统的输入量。
()A.正确B.错误7.在典型二阶系统中,()时为过阻尼状态。
A.B.C.D.8.凡在s右半平面上有零点或极点的系统,都称为非最小相位系统。
()A.是B.否9.传递函数分母多项式的根称为系统的极点。
()A.是B.否10.在开环系统中,只有输入量对输出量产生控制作用,输出量不参与系统的控制,因而开环系统没有抗干扰能力。
()A.是B.否第1卷参考答案一.综合考核1.参考答案:B2.参考答案:C3.参考答案:A4.参考答案:A5.参考答案:B6.参考答案:B7.参考答案:D8.参考答案:A9.参考答案:A10.参考答案:A。
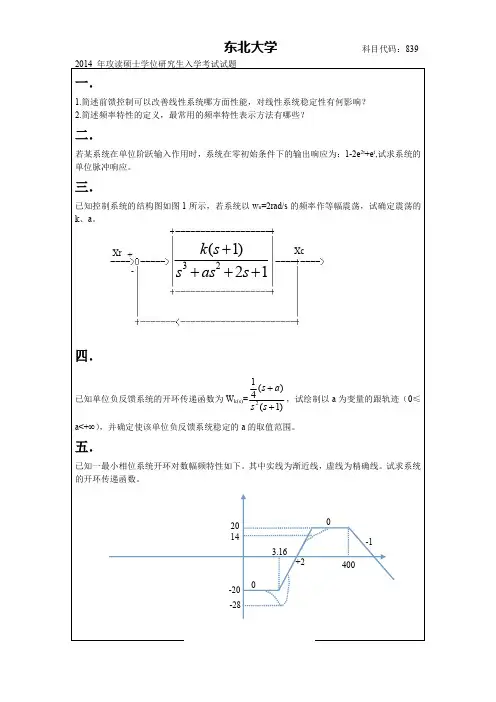
东北大学2014自控真题
一、简答题(10分)
1. 简述前馈控制可以改善线性系统哪方面性能,对线性系统稳定性有何影响?
2. 简述频率特性的定义,最常用的频率特性表示方法有哪些? 解:
(1) 通过前馈补偿,提高了系统的控制精度,减小了稳态误差。
对于给定前馈,可以提高跟踪速度。
对于按扰动矫正,可在偏差对被控量产生影响前对系统进行校正。
由于输入取自闭环外,不影响系统的特征方程式,故不影响系统的稳定性。
(2) 当输入信号为谐波时,频率特性为输出信号的傅氏变换与输入信号的傅氏变换之比。
常见的表示法有幅相频率特性曲线、对数频率特性曲线、对数幅相频率特性曲线。
二、(20分)
若某系统在单位阶跃输入作用时,系统在零初始条件下的输出响应为212t t e e -+,试求系统的单位阶跃响应。
解:12132[c(t)]21(s 2)(s 1)
-+=-+=----s L s s s s 由于1R
s (S )= 故(S)32(S)(S)(S 2)(S 1)
B C S W R -+==-- 当(t)(t)r δ=,即R(S)1=
32(S)W (S)*R(S)(S 2)(S 1)
B S
C -+==--, 进行拉氏反变换有11241[c(s)][
]421---=+=-+--t t L L e e s s 三、(20分)
已知系统的结构图如下图所示,若系统以2/n w rad s =的频率做等幅震荡,试确定震荡的k 、a 。
解:系统闭环特征方程:
32(s)s as (k 2)s (k 1)0B D =+++++=
由系统在2/n w rad s =的频率做等幅震荡,知2j ±为特征方程式的根。
令2s j =得“
84(k 2)*2(k 1)0j a j --++++=
整理得
(2k 4)(k 14a)0j -++-=
分别令实部为零,虚部为零,可得2k =,0.75a =
四、(20分)
已知单位负反馈系统的开环传递函数为,
21(s a)4(s)(s 1)
K W s +=+ 试绘制以a 为参数的根轨迹0a ≤<∞
并确定使该单位负反馈系统稳定的a 的取值范围。
解:
由系统开环传递函数可知其闭环特征方程式
3211(s)s 044
=+++=B D s s a 故等效开环传递函数为
214(s)1(s )2
K a W s + 以根轨迹法则绘制根轨迹,其中:
(1)渐近线13
σ=-,60θ=±,180 (2) 分离点
2'1
142
{()}0s s += 21122
()2()0s s s +++= 1
220s s ++=
16
s =-
(3)与虚轴交点令s jw =
22(0.25a )j(0.25)0ωωω-+-=
1a =,0.5ω=
故(0,1)a ∈稳定。
五、(20分)
已知一最小相位系统开环对数幅频特性如下。
其中实线为渐近线,虚线为精确线。
试求系统的开环传递函数。
解:
设()()212112222221211ζωωζωω⎛⎫++ ⎪⎝⎭=⎛⎫+++ ⎪⎝⎭
K s K s W s s s Ts 在低频段, 由20lg 20=-K 知 0.1K =
在1 3.16ω=
处,120lg
8=
解得10.203ζ=。
由 ()()240lg lg 20
40lg 3.16lg 20ωωω-=-=-c c
解得210,31.6ωω==c 。
在2ω处,有
220lg26ζ=
解得20.998ζ=。
综上,
()()()220.10.10.12810.0010.06310.0021K s s W s s s s ++=
+++
六、(20分)
一采用PD 串联校正控制系统结构图如下图所示。
(1) 当10,1p d K K ==时,绘制校正后系统开环对数频率特性曲线,求相位裕度。
(2) 若要求该系统穿越频率5c W =,相位裕度50γ=,求,p d K K 。
解:设PD 控制器的传递函数()PD K p d W s K K s =+
则系统的开环传递函数为
()()
11d p p K K K s K W s s s ⎛⎫+ ⎪ ⎪⎝⎭=+ (1) 当10,1p d K K ==时,()()()
100.111K s W s s s +=+ 由101ωω=⋅c c
解得 3.16ω=c ()18090arctan arctan0.135γωωω=︒-︒-+=︒c c c
(2) 由()518090arctan 5arctan 550d p
K K γ=︒-︒-+⋅=︒ arctan 538.69d p
K K =o 解得5 6.24tan38.69==o p
d
K K 因为穿越频率可由:
1ωω=⋅p
c c K
确定,由5ω=c 知25p K =。
故4=d K 。
七、(20分)
(1)若有两个非线性控制系统,均如下图所示。
有相同的非线性环节,而线性部分不同,
分别为
12(0.1s 1)W s =+、22(s 1)
W s =+ 试判断应用描述函数法分析其稳定性时,哪个系统分析精确程度更高,说明理由。
(2)非线性部分和线性部分分别为4(A)N A π=,1(s)(s 1)(s 2)
W s =++,则系统是否存在自振,若存在求出自振振幅和频率。
解:
(1)由于描述函数是用非线性部分的基波来代替整体的,所以线性部分低通滤波特性越好,精确度越高。
而滤波器的好坏主要体现在线性部分的惯性上,惯性越大,滤波特性越好。
由于2W 的惯性大,因而其低通滤波特性较好,分析的准确度更高。
(2)令1(j )(A)
ω-=W N ,即4(j 1)(j 2)ωωωπ-=++j A =233j(2)ωωω-+-
令32ωω-=0,解得/ω=s ,此时46A π-=-,解得A=20.2123π
=.
八、(20分)
设有零阶保持器的离散系统如图所示,其中(t)1(t),T 1s,K 1r ===。
试求系统单位阶跃相应的最大超调量、上升时间与峰值。
解: 由结构图知21(s)(s 1)
Ts
K e W s --=+,故20.3680.264(z) 1.3680.368K z W z z +=-+ 20.3680.264(z)0.632
B z W z z +=-+, 故其单位阶跃响应为2(0.3680.264)*(z)(z)*R(z)(0.632)(z 1)B z z
C W z z +==
-+- 由长除法得到12345(z)0.368z 1.4 1.4 1.147c z z z -----=+++++
即
*(t)0.368(t T)(t 2T) 1.4(t 3T) 1.4(t 4T) 1.147(t 5T)c δδ=-+-+-+-+- 在坐标上画出该离散系统的坐标图如下
由图可知 1.41%*100%40%1σ-==,22,M 1.4r p t T s ===。