系泊系统的设计
- 格式:docx
- 大小:578.25 KB
- 文档页数:5
新型系泊系统的设计方法及其水动力性能分析一、概述随着海洋资源的日益开发和利用,系泊系统在海洋工程中的应用越来越广泛,其设计优化及性能分析成为海洋工程领域的重要研究内容。
新型系泊系统的设计及其水动力性能分析,对于保障海洋平台、船舶等海洋结构物的安全、稳定与高效运行至关重要。
传统的系泊系统设计往往基于经验公式和简化的力学模型,难以准确反映实际复杂环境下的水动力特性。
随着计算流体力学、结构动力学等学科的快速发展,以及高性能计算机和数值模拟技术的广泛应用,新型系泊系统的设计方法正在向精细化、智能化和集成化方向发展。
本文旨在探讨新型系泊系统的设计方法及其水动力性能分析。
将介绍系泊系统的基本类型和结构特点,以及其在海洋工程中的应用场景。
重点阐述新型系泊系统的设计原则、关键技术和创新点,包括材料选择、结构设计、优化算法等方面。
通过数值模拟和实验研究,分析新型系泊系统在不同海况下的水动力性能,评估其稳定性和可靠性,为实际工程应用提供理论支撑和技术指导。
1. 新型系泊系统的重要性和应用背景随着海洋工程和船舶工业的飞速发展,新型系泊系统在海上工程结构物,特别是风力发电、海洋石油开采、海上货物运输等领域的应用越来越广泛。
系泊系统的主要功能是为海上设施提供安全、稳定的定位,确保其在各种环境条件下都能正常工作。
传统的系泊系统虽然在过去几十年中得到了广泛应用,但在面对极端海洋环境,如大风、大浪、海流和潮汐等复杂因素时,其性能往往受到挑战。
研究和开发新型系泊系统,提高其在极端环境下的性能,对于保障海上设施的安全、提高经济效益、促进海洋工程的持续发展具有重要意义。
新型系泊系统的研究不仅涉及结构设计、材料选择、制造工艺等多个方面,更重要的是要对其水动力性能进行深入分析。
水动力性能是指系泊系统在海洋环境中的受力、变形、振动等特性,它直接决定了系泊系统的稳定性和安全性。
通过对新型系泊系统的水动力性能进行分析,可以预测其在不同海洋环境下的表现,为系统设计和优化提供理论依据。

系泊系统的设计引言系统设计是软件开发中的重要环节,它涉及到对系统的整体架构、模块划分以及数据流向等进行详细规划。
本文将对一个系泊系统的设计进行介绍,包括系统的功能、设计原则以及关键模块的实现细节。
系泊系统的功能系泊系统是用于管理船只的停靠与起锚过程的系统。
其主要功能包括:1.记录船只的进港与启航时间:系统能够记录船只进港与启航的时间,方便管理者了解各个船只的停靠情况。
2.船只管理:系统能够对不同船只进行管理,包括船只的基本信息、停靠记录等。
3.系泊位管理:系统能够管理系泊位的使用情况,包括空闲状态、船只类型限制等。
4.船只调度:系统能够根据船只的进港与启航时间,进行船只的调度,确保系泊位的充分利用。
设计原则在进行系泊系统的设计时,需要遵循以下原则:1.模块化设计:系统应该进行模块化设计,将不同的功能拆分为独立的模块,提高系统的可维护性与可扩展性。
2.数据一致性:系统中的数据应该保持一致性,在进行船只调度等操作时,需要保证系泊位的状态与船只的状态一致。
3.异常处理:系统应该能够处理各种异常情况,如船只进港时间冲突、系泊位已满等情况,给出合理的提示与处理方案。
系泊系统的设计实现数据模型设计在设计系泊系统时,首先需要确定系统的数据模型。
以下是一个简化的数据模型示例:数据模型示例数据模型示例1.船只(Ship)表记录了船只基本信息,包括船只的名称、类型等。
2.系泊位(Berth)表记录了系泊位的基本信息,包括编号、状态等。
3.停靠记录(DockingRecord)表记录了船只的进港与启航时间,以及相关联的船只与系泊位信息。
系统架构设计系泊系统的整体架构可以分为以下几个模块:1.前端界面:负责与用户进行交互,展示船只与系泊位信息并提供相应的操作界面。
2.业务逻辑层:负责处理用户请求,进行船只调度、系泊位管理等操作。
3.数据访问层:负责与数据库进行数据的读写操作。
4.数据库:存储系统的数据。
系泊系统的关键模块实现细节1.船只进港与启航时间记录:当船只进港或启航时,系统会记录相应的时间并更新相关信息。
FPSO单点系泊系统的监控与报警系统设计与优化摘要:FPSO(Floating Production Storage and Offloading)是一种用于海上石油平台的浮式生产储存卸油设备。
单点系泊系统是FPSO的核心组成部分,负责将FPSO稳定地固定在海上,确保生产和储存的安全。
本文主要讨论FPSO单点系泊系统的监控与报警系统设计与优化,旨在提升单点系泊系统的可靠性和安全性。
1. 引言随着深海石油勘探的开展和需求的增加,FPSO作为一种有效的海上石油平台设备正变得越来越重要。
单点系泊系统是FPSO的关键部分之一,通过积极监控与及时报警,可以发现潜在的问题,避免事故发生,提高整体生产效率。
因此,设计和优化FPSO单点系泊系统的监控与报警系统非常关键。
2. 监控系统的设计与优化2.1 系统架构FPSO单点系泊系统的监控与报警系统应采用分布式架构,将各个子系统的监控数据集中并进行集成分析。
该系统应包括传感器、数据采集系统、数据处理与分析系统、报警系统以及远程监控与控制系统。
2.2 数据采集与处理监控系统应设有多个传感器,用以实时采集各种参数,如风速、水深、波浪等。
数据采集系统应负责将传感器采集到的数据进行预处理和分析,以提取有价值的信息,并及时对异常数据进行处理和报警。
2.3 报警系统报警系统应具备及时报警、准确报警的特点。
当监控系统检测到任何异常情况时,应立即发出警报,并将相关信息传输给运营人员。
同时,报警系统还可以通过声音、光线或震动等多种方式进行报警,以确保人们能够尽快采取行动。
3. 系统优化方案3.1 引入智能算法为了提高监控系统的预警能力,可以引入智能算法,如机器学习和数据挖掘技术。
通过对历史数据的分析和建模,系统可以学习和识别不同的异常模式,并提前发出警报。
这种智能化的优化方案将大大提升监控系统的准确性和可靠性。
3.2 远程监控与控制系统为了方便操作人员进行实时监控和控制,可以设计一个远程监控与控制系统。
FPSO单点系泊系统的钢缆设计与优化摘要:FPSO(浮式生产储油船)是一种灵活的海上石油生产设施,广泛应用于海上油田的开采。
FPSO的单点系泊系统是确保其在海上稳定运行的关键组成部分之一。
本文将重点讨论FPSO单点系泊系统中钢缆的设计与优化,分析钢缆的作用、材质选择、尺寸计算以及优化方法,以提高系统的安全性和性能。
1. 引言FPSO是将石油生产和储存设备集成于一艘船体上,在海上进行石油开采的装备。
在海上作业期间,FPSO需要保持在预定位置上,并抵抗来自海浪和风力的影响。
单点系泊系统是通过钢缆连接FPSO和海底锚地,确保其稳定性。
2. 钢缆的作用钢缆在FPSO单点系泊系统中起着承载和稳定的作用。
其主要功能包括:2.1 承载重量钢缆通过承受FPSO的重量,将其连接到海底锚地。
因此,钢缆的设计必须能够承受大约FPSO的整体重量和作业荷载。
2.2 抵抗力矩受到风力和海浪的作用,FPSO会产生力矩。
钢缆通过抵抗这些力矩,保持FPSO稳定。
2.3 耐久性和可靠性钢缆必须具备良好的耐久性和可靠性,以承受长期海洋环境的腐蚀和张力的影响。
3. 钢缆的材质选择在FPSO单点系泊系统中,钢缆通常采用高强度钢丝绳。
钢丝绳有以下优势:3.1 高强度钢丝绳的高强度使其能够承受较大的拉力和重量,确保系统的稳定性和安全性。
3.2 耐腐蚀性钢丝绳经过特殊处理,具备较好的耐腐蚀性能,能够抵御海水的侵蚀。
3.3 轻量化与传统的链条相比,钢丝绳的重量更轻,可以减少系统的整体重量,降低对FPSO的负荷。
4. 钢缆尺寸的计算钢缆的尺寸计算涉及到多个因素,如重量,系统的工作载荷,耐久性和系统的安全性等。
一般而言,需要考虑以下因素进行计算:4.1 预测荷载通过考虑海浪,风力等因素,预测钢缆所要承受的最大载荷,以保证系统安全。
4.2 应力分析根据钢缆的支撑位置,计算其所受应力,并评估其对系统的影响。
4.3 疲劳寿命钢缆在长期海洋环境下会受到疲劳和腐蚀的影响,需要计算其疲劳寿命,以确保系统的可靠性和安全性。
系泊系统设计模型作者:李睿意来源:《科学家》2017年第11期摘要本文主要研究近浅海观测网的传输节点在不同风浪流条件下,基于静力学与动力学方法,分析系泊系统的状态。
关键词静力学;悬链法;集中质量法;迭代法中图分类号 U6 文献标识码 A 文章编号 2095-6363(2017)11-0013-021 问题概述问题1:本题使用长为22.05m的锚链以及质量为1 200kg的重物球。
存在某海域,水深为18m。
假设海水静止,在风速为12m/s和24m/s的前提下,计算钢桶、钢管的倾斜角度,所给锚链的形状,浮标吃水的深度以及浮标游动的区域范围。
(ρ海水=1.025×103kg/m3)。
问题2:仍在问题1的条件下,设风速为36m/s,计算此时钢桶、钢管的倾斜角度,所给锚链的形状,浮标吃水的深度以及游动的区域范围。
问:在钢桶倾斜角度小于等于5°,锚链与海床夹角小于等于16°的前提下,重物球的质量应为多少?问题3:若海域实测水深为16m~20m,设计系泊系统,分析钢桶、钢管的倾斜角度,所给锚链的形状,浮标吃水的深度以及游动的区域范围。
考虑风力、水深和水流力。
假设海水速度最为1.5m/s、风速最大为36m/s。
针对问题1,首先在仅有风荷载的条件下,确立系统静力学模型。
对浮标、钢管、钢桶在精力平衡条件下进行受力分析,建立平衡方程。
进而利用悬链线控制方程对锚链相关参数进行求解。
其中海面风速为12m/s和24m/s时,浮标吃水深度分别为0.727 4m和0.751 4m。
解得钢桶和各节钢管的倾斜角度后,通过获得的锚链相关参数对锚链形状进行描述。
由于可假设风向为任一定向,因此,确定浮标的游动区域为以静力平衡状态下系统各部件在水平方向上的投影长度总和为游动半径的圆环上。
针对问题2,基于对锚链边界条件的考量,建立集中质量法静力学模型。
首先将浮标、钢管、钢管化作质点模型,对锚链按节点进行分段,分别建立静力学方程。
系泊系统的设计针对问题一,首先采用集中质量的多边形近似法对单点系泊系统进行静力学分析,结合单点浮标系统特性,建立单点浮标的静力学模型,并对其算法进行改进,使算法能够迭代修正浮标受到的浮力。
其次通过适当的假设列出平衡方程并求解,得出锚链各节点处张力的递推公式,利用MATLAB软件迭代验证,最后得到了较为准确的结果。
针对问题二,基于问题一建立的模型,得出在题设条件下,浮标系统已不处于最优工作状态,须通过改变重物球来对系统进行调节。
计算出临界条件下重物球的质量,利用MATLAB拟合得到的重物球重力与钢桶倾斜角度之间的关系曲线,得出对重物球进行调整的范围。
针对问题三,首先求得极端环境条件下钢桶倾角仍满足约束条件时候的重物球质量,然后通过合理的假设,在问题一建立的模型基础上,改变算法的迭代约束条件,从而得出不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
关键词:系泊系统;集中质量的多边形近似法;MATLAB;迭代一、问题的重述1.1问题的背景随着各国不断加大对海洋事业的投入以及不断深入对海底观测领域的探索,各海洋研究机构和海洋管理部门都相继建立了符合自身业务需求的海洋观测系统,其中浮标系统、系泊系统和水声通讯系统组成了近浅海观测网的传输节点。
而影响其系泊系统工作效果的因素很多,例如水流力、海风和水深等。
系泊系统的设计问题就是根据这些影响因素确定锚链的型号、长度和重物球的质量,使得系泊系统处于最佳工作状态。
从国家海洋资源战略角度来讲,研究各因素对系泊系统的不同影响显得尤为重要。
1.2问题的提出问题一:将该型传输节点布放在水深18m、海床平坦、海水密度为1.025某103kg/m3的静止海域时,选用II型电焊锚链22.05m,质量为1200kg的重物球,分别计算海面风速为12m/和24m/时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题二:在问题一的假设下,计算海面风速为36m/时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
精心整理赛区评阅编号(由赛区组委会填写):2016年高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
(包括我2.3.全国评阅随机编号(全国组委会填写):(请勿改动此页内容和格式。
此编号专用页仅供赛区和全国评阅使用,参赛队打印后装订到纸质论文的第二页上。
注意电子版论文中不得出现此页。
)系泊系统的设计和探究摘要本文利用牛顿力学定律,力矩平衡原理、非线性规划、循环遍历法等方法对系泊系统进行了设计与探究。
通过对系泊系统各组件和浮标运用牛顿经典力学体系进行分析,得到了各个情况下的钢桶倾斜角度、锚链状态、浮标吃水深度和游动区域。
第一问是求解在风速为12m/s和24m/s时,浮标的吃水深度和游动区域、钢桶以及钢管的倾斜角度和锚链形态。
对于此,首先,我们对浮标、钢管、钢桶、链环进行了基于静力平衡的力学分析,并得到了一系列的方程组;接着,由于钢管、钢桶、链环还满足力矩平衡状态,故得到系泊系统平衡时的刚体力学方程组;然后,根据系泊系统各组成部件的倾斜角度可以得出其在竖直方向的投影,且它们的投影之和与海水深度存在几何约束。
最后,以这个几何约束条件为前提,运用MATLAB中0.6870m度6.7m︒,半径为半径为。
速为量为︒,五种锚链适。
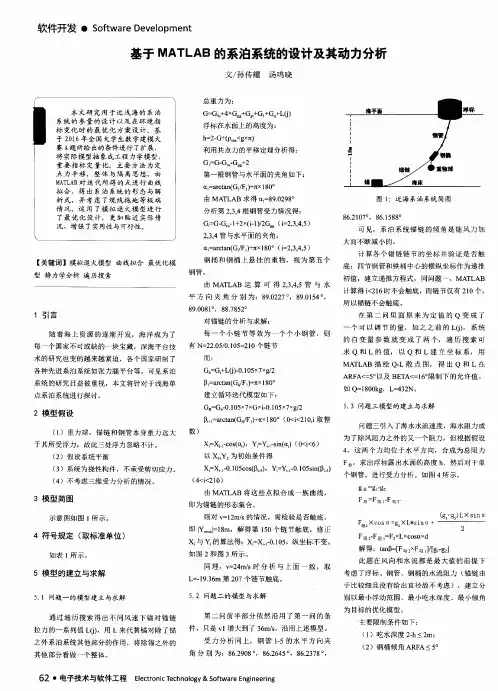
近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图一所示)。
某型传输节点的浮标系统可简化为低面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,常用型号及其参数已在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
“系泊系统”资料文集目录一、浅海新型FPSOIQFP多点系泊系统设计研究二、深水定位系泊系统仿真实验研究三、浮式结构物系泊系统时域非线性耦合分析四、FPSO悬式锚腿系泊系统的锚系设计研究五、深海系泊系统模型截断技术研究六、船舶系泊系统的建模仿真与应用研究浅海新型FPSOIQFP多点系泊系统设计研究浅海新型FPSO IQFP多点系泊系统设计研究随着海洋石油工业的不断发展,浮式生产储油轮(FPSO)已成为海洋油气开发的重要设施。
而多点系泊系统作为FPSO的关键组成部分,对于确保其稳定性和安全性具有重要意义。
近年来,一种新型的IQFP 多点系泊系统在浅海FPSO中得到了广泛应用。
本文将对这种新型系统的设计进行深入探讨。
IQFP,即“智能、快速、灵活、可配置”多点系泊系统,是一种新型的系泊技术。
它通过先进的智能化设计和快速的响应特性,实现了对FPSO的精确控制和稳定定位。
与传统多点系泊系统相比,IQFP具有更高的定位精度、更强的抗风浪能力以及更低的能耗。
锚泊定位是多点系泊系统的核心部分。
在IQFP系统中,采用了一种新型的锚型设计,通过优化锚的结构和材料,提高了锚的抓地力和耐久性。
通过先进的定位算法,系统能够实现自动锚泊定位,大大提高了定位精度和效率。
动态分析是多点系泊系统设计的关键环节。
在IQFP系统中,通过建立精确的数学模型,对系统的动态特性进行了深入分析。
同时,利用数值模拟和实验验证相结合的方法,对系统的稳定性、安全性和可靠性进行了全面评估。
控制系统是实现IQFP多点系泊系统智能化和自动化的关键。
在设计中,采用了先进的传感器技术和智能算法,实现了对FPSO的实时监测和精确控制。
同时,通过与船舶自动控制系统(Automatic Dynamic Positioning System)的集成,实现了对FPSO的全面自动化管理。
随着海洋油气开发的不断深入和技术的不断进步,IQFP多点系泊系统在浅海FPSO中的应用前景十分广阔。
组块浮托系泊系统设计分析提纲:1. 组块浮托系泊系统的概述2. 设计分析中需要关注的主要因素3. 不同类型组块浮托系统的优缺点分析4. 如何选择适合的组块浮托系统5. 未来的发展方向和趋势1. 组块浮托系泊系统的概述组块浮托系泊系统是一种新型的建筑物水下支撑系统,它将浮动式建筑物直接系泊在海底,以充分利用水下空间,提高海洋开发的效率。
这种系统通常由由浮动块、系泊线、承载系统和支撑平台等部件组成,经过合理的设计和施工后,可以强化建筑物对水下环境的适应能力,并增加其稳定性和可靠性。
2. 设计分析中需要关注的主要因素设计组块浮托系泊系统时,需要关注的主要因素有以下几点:(1)环境因素:如海洋环境的波浪力量、流速、水位变化等,都会对浮体的稳定性及系泊系统的整体性能产生影响。
(2)建筑物因素:包括建筑物的质量、形状、高度、重心等因素,之间的关系都会影响系泊系统的稳定性。
(3)系泊系统因素:系泊线、浮动块、锚链、各种连接器等的材料、尺寸和数量,以及布置方式和锚固深度等,都会影响系泊系统的整体性能和分布特征。
(4)施工安装因素:包括浮体和系泊系统的安装过程中的质量、精度和安全性等因素,都会影响系统的最终性能和寿命。
3. 不同类型组块浮托系统的优缺点分析目前,市面上有许多不同类型的组块浮托系统,主要分为以下几种:(1)金属独木舟式浮体:通常由单一的金属浮筒、液压调节器和系统控制板组成,具有重量轻、稳定性好、灵活性高等特点,适用于较小规模的建筑物。
(2)水下框架式浮体:由一系列金属或塑料的框架和浮筒组成,可以根据海洋环境和建筑物的特点灵活调节每个部件的尺寸和间距,适用于较大规模的建筑物。
(3)模块化浮动体系:由一系列模块化的浮体、可调系统和角铁组成,可适应不同规模、形状和高度的建筑物,是目前使用最为广泛的组块浮托系统之一。
(4)混凝土或钢铁球形浮体:球形浮体在水下具有较小的阻力和良好的稳定性,但制造和安装难度较大,适用于较大规模的建筑物。
2目录I.研究背景II.研究对象III.多风机-共享系泊系统设计IV.成本效益评估V.结语a.多海况全浪向仿真b.敏感性分析c.断缆工况d.系泊优化研究背景3 p漂浮式风机- 海上风电发展迅速,中国海上风电装机容量全球第一- 应用前景广阔:水深适应性好、开发深远海- 降本增效:成本问题导致竞争力减弱系泊相关成本三峡引领号扶摇号海油观澜号4p 共享系泊(Shared Mooring )- 概念提出:在相邻的浮式风机之间布置横跨式的共享系泊线- 目的:减少风电场所需系泊线和锚的数量,降低系泊线和锚的材料、 锚的安装勘探等一系列成本,进而降低成本。
风机间横跨式系泊取代部分锚线研究背景多种共享系泊布置型式大型共享系泊风电场设计挑战p共享系泊带来的风机间复杂的耦合效应- 共享系泊非线性悬链线- 刚柔耦合、风机间耦合:非线性结构载荷;数值仿真计算久- 环境复杂:风电场对风场、波浪场的影响,即结构间的干涉影响研究对象p10MW OUCwind半潜式浮式风机Ø建立风机时域一体化分析模型Ø三立柱偏置风机、目标水深50米、3×1系泊布置Ø风浪流耦合:考虑湍流风、不规则波、二阶差频波浪力的时域耦合仿真单个风机系泊布置一体化仿真模型吃水15m干舷11.5m特征长度65m浮筒宽度11m浮筒高度 4.5m立柱直径11m重心高度-3.50m浮心高度-11.13m平台质量2910t排水量14197t设计分析流程梳理7基于10MW OUCwind半潜式风机设计多风机共享系泊系统建立“多风机-共享系泊系统”一体化时域分析模型共享系泊线敏感性分析多海况、全浪向仿真断缆工况模拟系泊优化方案共享系泊成本效益评估梳理总结共享系泊系统的设计分析技术要点8多风机-共享系泊系统设计锚链单位长度重量以50kg/m 左右为间隔进行敏感性分析p 等边三角形布置 - 相邻风机间隔1200米(相隔6-8倍的叶轮直径以上,认为水动力特性保持不变) - 锚线:采用与单风机一致,R3无档锚链,直径185mm- 共享系泊线:采用R3无档锚链进行敏感性分析共享系泊缆直径 [mm]重量 [kg/m]破断载荷[kN]Chain 1871516252Chain 21002008315Chain 31112469650Chain 412229811365Chain 5132********多风机-共享系泊系统布置型式9多海况、全浪向仿真全浪向仿真Hs Tp Uc -m/s m s m/s -海况18.0 2.539.85 1.0工作海况211.4 3.1010.10 1.0工作海况324.0 5.6911.23 1.0工作海况440.09.7712.95 1.0停机p 针对单风机和多风机-共享系泊系统进行多海况、全浪向仿真 - 多风机-共享系泊系统的主控海况与单风机一致,都为极端停机海况(LC4) - 危险工况为60度入射方向的极端停机海况- 相同海况下,共享系泊会造成水平回复刚度的下降10共享系泊缆敏感性分析环境参数:正向入射 LC 2: H s = 3.1m, T p = 10.1s, U c = 1m/s , U wind = 11.4m/s p敏感性分析n 随着共享系泊缆单位质量的增大,共享系泊和锚线的系泊张力也随之增大。
系泊系统的设计
摘要
一、问题重述
不同海域,不同环境,对船的稳定,信息的传输都有影响,近海观测网主要是对船的安全固定,和探测周围海域的信息预警。
而近海观测网主要由浮标系统、系泊系统和水声系统组成。
观测和固定主要是由钢桶、锚链,钢管的角度决定观测的效果。
在此对系泊系统进行设计检验,使倾斜角度最小.
问题 1 假设某传输节点选用二型长度为22.05m 锚链,选用重物球质量为1200kg 。
现在将该传输节点放在水深为18m 、海床平坦,海水密度为1.025*10的海域。
假设海水平静,分别计算海面风速为12/,24/m s m s 时钢桶和钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2 在问题1的假设下求海面风速为36/m s 时钢桶和钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
请调节重物球的质量,使钢桶的倾斜角度不超过5度,锚链在锚点与海床夹角不超过16度。
问题3 由于潮汐等因素的影响,布放海域的实测水深介于16~20m m 之间。
布放点的海水速度最大可达到1.5/m s ,风速最大可达到36/m s 。
请给出考虑风力,水流力和水深情况下系泊系统设计,分析不同情况下钢桶和钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
二、模型假设
三、符号说明
四、模型的建立与求解
121201
1212sin 0cos 0F F F G F -∂=⎧⎨--∂=⎩ 简后1111
s i 23
G L ⎛∂- ⎝ 风力()211112cos 0.625F R L h v =-∂⨯⨯⎡⎤⎣⎦
钢管1
12232312
2022323sin sin 0cos cos 0F F F F G F ∂-∂=⎧⎨∂+--∂=⎩ 化简后()202221222212222sin sin cos cos sin 0G F L F L F L θθθ-+∂-∂=
五、模型评价
参考文献
附录。