系泊系统的设计
- 格式:pdf
- 大小:1.51 MB
- 文档页数:78
深水半潜式钻井平台系泊系统方案设计与分析的开题报告一、选题背景深水半潜式钻井平台是一种海洋工程设备,用于在海洋中进行石油钻探和开采等作业。
深海环境中,海浪、洋流、风力等自然因素易造成平台失稳和移动,影响钻井作业的正常进行。
为了解决这一问题,深水半潜式钻井平台需要设计一套系泊系统,以确保平台的稳定性和安全性。
系泊系统方案的设计和分析是该领域的研究热点之一。
二、研究内容本文旨在研究深水半潜式钻井平台系泊系统的方案设计和分析问题,具体研究内容包括以下几个方面:1. 系泊系统的功能和特点:探讨系泊系统在深水半潜式钻井平台中的作用和特点,揭示其在钻井作业中的重要性。
2. 系泊系统方案的设计:介绍深水半潜式钻井平台系泊系统的设计方法和流程,包括方案设计的原则、计算方法等。
3. 系泊系统方案的优化:探索系泊系统方案的优化方法,包括优化设计流程、优化系泊设备选型和工艺参数、提高系泊系统的效率等。
4. 系泊系统方案的分析:通过数值模拟或计算机仿真等手段,对系泊系统方案进行分析和评价,得出合理的成果,并进行验证和应用。
三、研究意义深水半潜式钻井平台系泊系统方案的设计和分析是保障深海石油勘探和开采作业安全和效率的关键。
本文的研究成果将为该领域的研究和应用提供理论和技术支持,为相关企业提供参考和指导。
四、研究方法本文将采用文献调研、方案设计、优化分析和数值模拟等方法进行研究。
首先,对深水半潜式钻井平台系泊系统的研究现状、发展趋势和关键技术进行文献综述和分析。
然后,基于系统工程原理和技术方法对钻井平台的系泊系统方案进行设计和优化。
最后,采用数值模拟软件对优化方案进行验证和应用。
五、预期成果本文的预期成果包括以下几个方面:1. 深入探讨深水半潜式钻井平台系泊系统的功能和特点,为深海石油勘探和开采提供理论基础。
2. 提出一套系泊系统方案设计和分析方法,包括设计原则、计算方法、优化策略等,为相关企业提供技术支持。
3. 通过数值模拟或计算机仿真,验证和应用系泊系统优化方案,为现场施工提供指导和保障。
新型系泊系统的设计方法及其水动力性能分析一、概述随着海洋资源的日益开发和利用,系泊系统在海洋工程中的应用越来越广泛,其设计优化及性能分析成为海洋工程领域的重要研究内容。
新型系泊系统的设计及其水动力性能分析,对于保障海洋平台、船舶等海洋结构物的安全、稳定与高效运行至关重要。
传统的系泊系统设计往往基于经验公式和简化的力学模型,难以准确反映实际复杂环境下的水动力特性。
随着计算流体力学、结构动力学等学科的快速发展,以及高性能计算机和数值模拟技术的广泛应用,新型系泊系统的设计方法正在向精细化、智能化和集成化方向发展。
本文旨在探讨新型系泊系统的设计方法及其水动力性能分析。
将介绍系泊系统的基本类型和结构特点,以及其在海洋工程中的应用场景。
重点阐述新型系泊系统的设计原则、关键技术和创新点,包括材料选择、结构设计、优化算法等方面。
通过数值模拟和实验研究,分析新型系泊系统在不同海况下的水动力性能,评估其稳定性和可靠性,为实际工程应用提供理论支撑和技术指导。
1. 新型系泊系统的重要性和应用背景随着海洋工程和船舶工业的飞速发展,新型系泊系统在海上工程结构物,特别是风力发电、海洋石油开采、海上货物运输等领域的应用越来越广泛。
系泊系统的主要功能是为海上设施提供安全、稳定的定位,确保其在各种环境条件下都能正常工作。
传统的系泊系统虽然在过去几十年中得到了广泛应用,但在面对极端海洋环境,如大风、大浪、海流和潮汐等复杂因素时,其性能往往受到挑战。
研究和开发新型系泊系统,提高其在极端环境下的性能,对于保障海上设施的安全、提高经济效益、促进海洋工程的持续发展具有重要意义。
新型系泊系统的研究不仅涉及结构设计、材料选择、制造工艺等多个方面,更重要的是要对其水动力性能进行深入分析。
水动力性能是指系泊系统在海洋环境中的受力、变形、振动等特性,它直接决定了系泊系统的稳定性和安全性。
通过对新型系泊系统的水动力性能进行分析,可以预测其在不同海洋环境下的表现,为系统设计和优化提供理论依据。
FPSO单点系泊系统的管道系统设计与优化随着全球石油勘探活动的增加,FPSO(浮式生产储油船)作为一种灵活、可移动的海上石油生产设备,越来越受到能源公司的青睐。
FPSO单点系泊系统在FPSO设计中起着关键的作用,它不仅需要保证石油和天然气的生产和储存,还需要确保安全可靠的管道系统设计和优化。
FPSO单点系泊系统的管道系统设计关乎着整个生产过程的安全性和高效性。
在设计过程中,需要考虑以下几个方面:1.管道布局与连接:在FPSO单点系泊系统中,管道布局应根据生产平台的结构、设备布置和工艺流程进行合理规划。
优化的管道系统应确保管道的短距离和低阻力,以减少流体运输过程中的能源损失。
此外,管道连接必须可靠,以确保管道系统的完整和安全性。
2.材料选择与管道尺寸:在FPSO单点系泊系统的管道系统设计中,材料的选择对管道的耐腐蚀性、强度和可靠性至关重要。
根据输送介质的特性,选择合适的材料,如碳钢、不锈钢等。
此外,管道尺寸的合理选择也是优化设计的关键,既要满足预定流量要求,又要考虑安装和维护的便利性。
3.流体力学分析与压力控制:在FPSO单点系泊系统的管道系统优化中,流体力学分析是至关重要的。
通过对流体的流动速度、压降和阻力等参数进行分析,可以优化管道系统的设计,减少能源损失。
此外,压力控制是保证管道系统安全运行的关键。
合理设置安全阀和泄压装置,控制系统的压力在安全范围内。
4.维护与监测:在FPSO单点系泊系统的管道系统设计中,维护和监测是不可忽视的方面。
合理设置检修设备和仪表,确保管道系统的可靠性和操作便利性。
定期进行巡检和维护,及时发现和解决管道的泄漏、腐蚀等问题,确保FPSO单点系泊系统的长期安全运行。
综上所述,FPSO单点系泊系统的管道系统设计与优化是确保FPSO安全、高效生产的重要环节。
通过合理的管道布局与连接、材料选择与管道尺寸、流体力学分析与压力控制以及维护与监测等措施,可以达到优化管道系统设计、提高生产效率和保证安全运行的目标。
漂浮式海上风电机组基础及系泊系统设计导则以漂浮式海上风电机组基础及系泊系统设计导则为标题随着对可再生能源的需求不断增加,风能作为一种清洁、可持续的能源形式受到了广泛关注。
而在海洋中,海上风电机组成为了一种重要的风能利用形式。
相较于陆上风电机组,海上风电机组具有更稳定的风能资源、更大的发电潜力和更少的环境影响。
在海上风电机组中,漂浮式风电机组由于其灵活性和适应性而备受瞩目。
本文将就漂浮式海上风电机组的基础及系泊系统设计进行探讨。
1. 漂浮式海上风电机组基础设计导则漂浮式海上风电机组的基础设计是确保机组稳定性和安全性的关键。
首先,基础设计要充分考虑海洋环境的复杂性,包括海浪、风力和潮流等因素。
基础结构需要具备足够的刚度和稳定性,以抵抗海浪和风力的冲击。
同时,基础结构还需要具备良好的防腐性能,以应对海水的腐蚀。
基础设计还需要考虑到机组的安装和维护便利性。
基础结构应该能够支持机组的安装和维护,同时提供足够的空间和设施供人员操作。
基础设计还应考虑到环境保护因素。
在设计过程中要充分考虑到海洋生态环境的保护,避免对海洋生物和海洋生态系统造成过大的影响。
2. 漂浮式海上风电机组系泊系统设计导则漂浮式海上风电机组的系泊系统是确保机组稳定性和位置控制的核心。
首先,系泊系统设计要充分考虑到风力和海流对机组的影响。
系泊系统需要具备足够的刚性和强度,以抵抗外力的作用。
同时,系泊系统还需要具备一定的伸缩性,以应对海浪和风力的变化。
系泊系统设计还需要考虑到机组的位置控制。
通过合理的系泊设计,可以实现对机组位置的控制和调整,以确保机组始终处于最佳的发电位置。
系泊系统设计还应考虑到安全性和可靠性。
系泊系统需要具备足够的安全保障措施,以应对异常情况的发生。
同时,系泊系统还需要具备一定的可靠性,以确保机组的长期稳定运行。
漂浮式海上风电机组的基础及系泊系统设计是确保机组稳定性和安全性的关键。
基础设计需要考虑到海洋环境的复杂性和机组的安装维护便利性,系泊系统设计需要考虑到风力和海流的影响以及机组的位置控制和安全可靠性。
系泊系统的设计数学建模以系泊系统的设计数学建模为标题,我们来探讨一下该系统的数学建模方法。
系泊系统是指将船只或其他浮动物体固定在水中的一种装置。
在设计系泊系统时,需要考虑到多种因素,如风、波浪、潮流等。
为了确保系泊系统的安全性和稳定性,需要进行数学建模,以便分析和预测系统的行为。
我们可以考虑船只与锚之间的力学关系。
船只受到来自风、波浪和潮流等外力的作用,而锚通过拉力将船只固定在水中。
我们可以使用牛顿第二定律来描述船只的运动状态。
假设船只的质量为m,加速度为a,外力的合力为F,那么可以得到以下公式:F = ma。
接下来,我们需要考虑锚链的力学特性。
锚链是连接船只和锚的重要部分,它承受着船只在水中的运动引起的张力。
我们可以使用弹簧模型来描述锚链的特性。
假设锚链的弹性系数为k,长度为l,弹性形变为x,那么可以得到以下公式:F = kx。
除了船只和锚链的力学特性,我们还需要考虑水流的影响。
水流会给船只和锚链施加额外的力,从而影响系统的稳定性。
我们可以使用流体力学的知识来描述水流的特性。
假设水流的速度为v,密度为ρ,船只的受力面积为A,那么可以得到以下公式:F = ρAv。
在数学建模中,我们还需要考虑到船只的姿态稳定性。
船只在水中的姿态受到风、波浪和潮流等因素的影响,如果船只的姿态不稳定,就会导致系泊系统的不稳定。
我们可以使用刚体力学的知识来描述船只的姿态稳定性。
假设船只的质量矩阵为I,角加速度为α,扭矩为τ,那么可以得到以下公式:τ = Iα。
我们还需要考虑到船只与锚链之间的相互作用。
船只的运动会引起锚链的张力变化,而锚链的形变又会对船只的运动产生影响。
我们可以使用动力学的知识来描述船只和锚链之间的相互作用。
假设船只和锚链之间的相互作用力为F,船只的加速度为a,锚链的弹性形变为x,那么可以得到以下公式:F = ma = kx。
通过以上的数学建模,我们可以对系泊系统的行为进行分析和预测。
我们可以通过求解上述公式,得到船只、锚链和水流之间的关系,并进一步优化系统的设计,以提高系统的安全性和稳定性。
漂浮式海上风电机组基础及系泊系统设计导则漂浮式海上风电机组是一种利用风能发电的装置,它可以在海上进行安装和运行。
为了确保机组的稳定性和安全性,需要设计合适的基础和系泊系统。
本文将介绍漂浮式海上风电机组基础及系泊系统的设计导则。
一、基础设计导则1. 基础类型选择:根据海洋环境条件和机组规模,选择合适的基础类型,常见的有浮式基础、半浮式基础和沉管基础等。
浮式基础适用于较浅的海域,半浮式基础适用于中等深度的海域,沉管基础适用于深海。
2. 基础材料选择:考虑到海水的腐蚀性和机组的重量,基础材料需要具备良好的耐腐蚀性和强度。
常见的基础材料有混凝土、钢材和复合材料等,选择合适的材料可以提高基础的稳定性和耐久性。
3. 基础形状设计:基础的形状设计应考虑到机组的重心和风力对基础的影响。
合理的基础形状可以减小基础的倾斜和摇晃,提高机组的稳定性。
常见的基础形状有圆形、方形和多边形等。
4. 基础固定方式设计:基础的固定方式有锚链固定、钢缆固定和锚桩固定等。
选择合适的固定方式可以提高基础的稳定性和抗风性能。
同时,还需要考虑到基础的安装和维护便捷性。
二、系泊系统设计导则1. 系泊系统类型选择:根据基础类型和海洋环境条件,选择合适的系泊系统类型。
常见的系泊系统类型有单点系泊、多点系泊和主动控制系泊等。
单点系泊适用于浅海区域,多点系泊适用于中等深度的海域,主动控制系泊适用于深海。
2. 系泊系统材料选择:系泊系统的材料需要具备良好的耐腐蚀性和强度。
常见的系泊系统材料有钢材和合成材料等,选择合适的材料可以提高系统的耐久性和可靠性。
3. 系泊系统布置设计:系泊系统的布置设计应考虑到基础的形状和机组的重心。
合理的布置设计可以减小系泊系统的摆动和张力,提高机组的稳定性。
同时,还需要考虑到系统的安装和维护便捷性。
4. 系泊系统参数计算:根据机组的重量、风力和海洋环境条件,计算系泊系统的参数,包括锚链长度、钢缆长度和系泊点位置等。
合理的参数计算可以确保系统的稳定性和抗风性能。
组块浮托系泊系统设计分析提纲:1. 组块浮托系泊系统的概述2. 设计分析中需要关注的主要因素3. 不同类型组块浮托系统的优缺点分析4. 如何选择适合的组块浮托系统5. 未来的发展方向和趋势1. 组块浮托系泊系统的概述组块浮托系泊系统是一种新型的建筑物水下支撑系统,它将浮动式建筑物直接系泊在海底,以充分利用水下空间,提高海洋开发的效率。
这种系统通常由由浮动块、系泊线、承载系统和支撑平台等部件组成,经过合理的设计和施工后,可以强化建筑物对水下环境的适应能力,并增加其稳定性和可靠性。
2. 设计分析中需要关注的主要因素设计组块浮托系泊系统时,需要关注的主要因素有以下几点:(1)环境因素:如海洋环境的波浪力量、流速、水位变化等,都会对浮体的稳定性及系泊系统的整体性能产生影响。
(2)建筑物因素:包括建筑物的质量、形状、高度、重心等因素,之间的关系都会影响系泊系统的稳定性。
(3)系泊系统因素:系泊线、浮动块、锚链、各种连接器等的材料、尺寸和数量,以及布置方式和锚固深度等,都会影响系泊系统的整体性能和分布特征。
(4)施工安装因素:包括浮体和系泊系统的安装过程中的质量、精度和安全性等因素,都会影响系统的最终性能和寿命。
3. 不同类型组块浮托系统的优缺点分析目前,市面上有许多不同类型的组块浮托系统,主要分为以下几种:(1)金属独木舟式浮体:通常由单一的金属浮筒、液压调节器和系统控制板组成,具有重量轻、稳定性好、灵活性高等特点,适用于较小规模的建筑物。
(2)水下框架式浮体:由一系列金属或塑料的框架和浮筒组成,可以根据海洋环境和建筑物的特点灵活调节每个部件的尺寸和间距,适用于较大规模的建筑物。
(3)模块化浮动体系:由一系列模块化的浮体、可调系统和角铁组成,可适应不同规模、形状和高度的建筑物,是目前使用最为广泛的组块浮托系统之一。
(4)混凝土或钢铁球形浮体:球形浮体在水下具有较小的阻力和良好的稳定性,但制造和安装难度较大,适用于较大规模的建筑物。
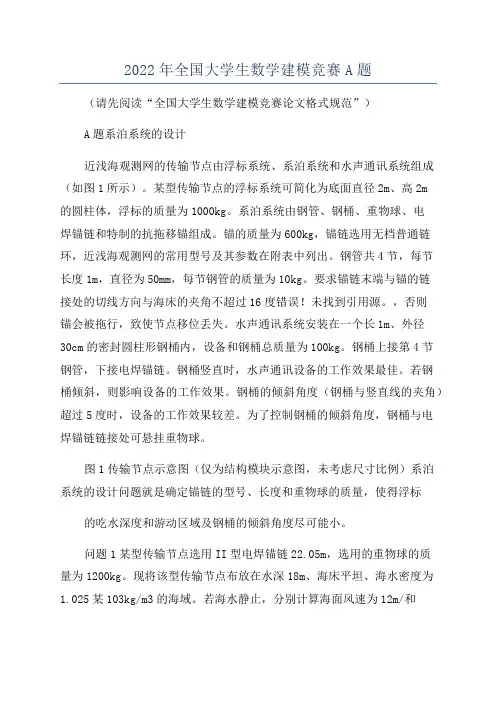
2022年全国大学生数学建模竞赛A题(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题系泊系统的设计近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度错误!未找到引用源。
,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
钢桶上接第4节钢管,下接电焊锚链。
钢桶竖直时,水声通讯设备的工作效果最佳。
若钢桶倾斜,则影响设备的工作效果。
钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。
为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
图1传输节点示意图(仅为结构模块示意图,未考虑尺寸比例)系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。
现将该型传输节点布放在水深18m、海床平坦、海水密度为1.025某103kg/m3的海域。
若海水静止,分别计算海面风速为12m/和24m/时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2在问题1的假设下,计算海面风速为36m/时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
问题3由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。

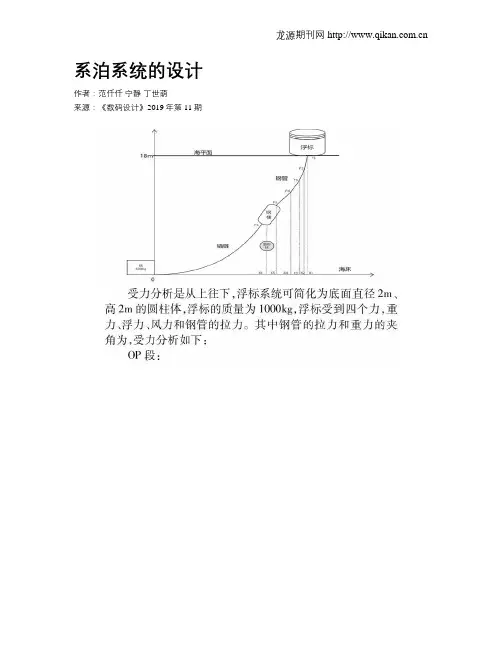
系泊系统的设计作者:范仟仟宁静丁世萌来源:《数码设计》2019年第11期摘要:在系泊系统的设计问题中,首先明确锚链的两种状态,一种是拖地,一种是悬于水中。
故通过受力分析以及结合悬链线长度公式和各个角度的三角函数值,解方程求得临界速度v。
进而将题中的两个速度与临界速度进行比较判断锚链状态。
v固定时求解,不同的是此时式中未知量为吃水深度H,之后同样借助钢桶与重物球连接点坐标代入的方法,求得所需。
过程中已经建立关于各个角度的三角函数的v(或H)表达式,求出v(或H)利用反三角函数得出倾斜角度,锚链形状将求出的v(或H)代入悬链线曲线方程即可、游动区域即为锚链末端到浮标中心的横坐标之差,可用各个角度的三角函数求得。
关键词:悬链线方程;系泊系统设计;三角函数中图分类号TP311.52 文献标识码:A 文章编号:1672-9129(2019)11-0037-02Abstract: in the design of mooring system, two states of anchor chain are firstly defined,one is dragging the ground, the other is hanging in the water. Therefore, by force analysis and combining catenary length formula and trigonometric function value of each Angle, the equation was solved to obtain the critical velocity v. Then the two velocities in the question are compared with the critical velocity to judge the anchor chain state. When v is fixed, the unknown quantity in the equation is the draft depth H. After that, the required quantity can be obtained by substituting in the coordinates of the connection point between the steel bucket and the heavy ball. Process has been established on every Angle of the triangle function of v (H) or expression, and v (H) or using the inverse trigonometric function Angle, the chain will be out of shape v (H) or into the catenary curve equation can swim, area is the abscissa to buoy center at the end of the chain, the difference between the available every Angle of the triangle function is obtained.Key words: catenary equation; Mooring system design; Trigonometric functions近淺海观测网的传输节点由浮标、系泊和水声通讯三个系统组成。
系泊系统的设计引言系统设计是软件开发中的重要环节,它涉及到对系统的整体架构、模块划分以及数据流向等进行详细规划。
本文将对一个系泊系统的设计进行介绍,包括系统的功能、设计原则以及关键模块的实现细节。
系泊系统的功能系泊系统是用于管理船只的停靠与起锚过程的系统。
其主要功能包括:1.记录船只的进港与启航时间:系统能够记录船只进港与启航的时间,方便管理者了解各个船只的停靠情况。
2.船只管理:系统能够对不同船只进行管理,包括船只的基本信息、停靠记录等。
3.系泊位管理:系统能够管理系泊位的使用情况,包括空闲状态、船只类型限制等。
4.船只调度:系统能够根据船只的进港与启航时间,进行船只的调度,确保系泊位的充分利用。
设计原则在进行系泊系统的设计时,需要遵循以下原则:1.模块化设计:系统应该进行模块化设计,将不同的功能拆分为独立的模块,提高系统的可维护性与可扩展性。
2.数据一致性:系统中的数据应该保持一致性,在进行船只调度等操作时,需要保证系泊位的状态与船只的状态一致。
3.异常处理:系统应该能够处理各种异常情况,如船只进港时间冲突、系泊位已满等情况,给出合理的提示与处理方案。
系泊系统的设计实现数据模型设计在设计系泊系统时,首先需要确定系统的数据模型。
以下是一个简化的数据模型示例:数据模型示例数据模型示例1.船只(Ship)表记录了船只基本信息,包括船只的名称、类型等。
2.系泊位(Berth)表记录了系泊位的基本信息,包括编号、状态等。
3.停靠记录(DockingRecord)表记录了船只的进港与启航时间,以及相关联的船只与系泊位信息。
系统架构设计系泊系统的整体架构可以分为以下几个模块:1.前端界面:负责与用户进行交互,展示船只与系泊位信息并提供相应的操作界面。
2.业务逻辑层:负责处理用户请求,进行船只调度、系泊位管理等操作。
3.数据访问层:负责与数据库进行数据的读写操作。
4.数据库:存储系统的数据。
系泊系统的关键模块实现细节1.船只进港与启航时间记录:当船只进港或启航时,系统会记录相应的时间并更新相关信息。
系泊系统的设计数学建模以系泊系统的设计数学建模为标题,本文将介绍系泊系统设计中的数学建模方法和相关原理。
系泊系统是指用于固定船舶或浮动结构物的一种装置,常用于码头、船坞、海上石油平台等场所。
在设计系泊系统时,需要考虑到各种因素,如海浪、风力、船舶质量等。
数学建模是一种将现实问题转化为数学模型的方法,通过建立适当的数学模型,可以对系泊系统进行分析和优化设计。
对于系泊系统中的海浪和风力等外部环境因素,可以使用波浪理论和风力学原理进行数学建模。
波浪理论可以描述海浪的传播和幅度,通过建立波浪模型可以计算出海浪对系泊系统的作用力。
风力学原理可以描述风力对系泊系统的作用,通过建立风力模型可以计算出风力对系泊系统的作用力。
这些外部环境因素的数学建模可以帮助设计者预测系泊系统在不同环境条件下的稳定性。
对于系泊系统中的船舶质量和系泊装置的特性,可以使用力学原理进行数学建模。
船舶质量可以分解为重力和浮力两部分,通过建立重力和浮力模型可以计算出船舶的质量。
系泊装置的特性可以通过建立弹性力学模型来描述,可以计算出系泊装置对船舶的支撑力和阻尼力。
这些力学模型的数学建模可以帮助设计者评估系泊系统的稳定性和可靠性。
对于系泊系统的优化设计,可以使用优化算法进行数学建模。
优化算法可以通过建立目标函数和约束条件,来寻找最优的系泊系统设计方案。
通过数学建模和优化算法,设计者可以在考虑各种因素的基础上,找到最合适的系泊系统设计方案,以提高系统的稳定性和安全性。
系泊系统的设计数学建模是一种重要的工具和方法,可以帮助设计者在考虑各种因素的基础上,进行系统的分析和优化设计。
通过建立适当的数学模型和使用优化算法,可以提高系泊系统的稳定性和可靠性,为实际工程应用提供科学依据。
系泊系统的设计数学建模一、引言系泊系统是一种常见的海洋工程设施,用于将船只或其他海洋结构物固定在水面或水下的一种装置。
设计一个高效可靠的系泊系统对于确保船只安全停靠以及海洋工程设施的稳定非常重要。
本文将介绍系泊系统设计的数学建模方法,通过数学模型来分析和优化系泊系统的设计。
二、系统建模1. 系泊系统的力学模型系泊系统的力学模型是研究系泊系统的基础。
通过力学原理和静力学平衡条件,可以建立系泊系统的力学方程。
其中包括各个力的平衡方程、物体的运动方程等。
通过求解这些方程,可以得到系泊系统的各个参数,如系泊绳的张力、浮标的位置等。
2. 系泊系统的动力学模型系泊系统在海洋环境中受到风浪等外界力的作用,因此需要考虑系统的动力学特性。
通过建立动力学模型,可以分析系泊系统的振动特性和响应能力。
常用的方法包括振动方程的建立和求解、频域分析等。
通过分析动力学模型,可以得到系泊系统的自然频率、阻尼比等参数。
三、优化设计1. 系泊系统的参数选择在设计系泊系统时,需要选择合适的参数,如系泊绳的长度、材料、直径等。
通过数学模型,可以分析不同参数对系泊系统性能的影响,从而选择最佳的参数组合。
例如,通过分析系泊绳的长度与稳定性的关系,可以确定最佳的系泊绳长度。
2. 系泊系统的布置方式系泊系统的布置方式也对系统性能有重要影响。
通过数学模型,可以分析不同布置方式对系统稳定性、抗风浪性能等的影响。
例如,通过分析不同锚点数量和位置的影响,可以选择最佳的系泊系统布置方式。
四、案例分析以某港口停泊船只的系泊系统设计为例,利用数学建模方法对系统进行优化设计。
通过建立力学模型和动力学模型,分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,得到最佳的系泊系统设计方案。
五、结论通过数学建模方法,可以对系泊系统的设计进行分析和优化。
通过建立力学模型和动力学模型,可以分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,可以得到最佳的系泊系统设计方案。
系泊系统的设计针对问题一,首先采用集中质量的多边形近似法对单点系泊系统进行静力学分析,结合单点浮标系统特性,建立单点浮标的静力学模型,并对其算法进行改进,使算法能够迭代修正浮标受到的浮力。
其次通过适当的假设列出平衡方程并求解,得出锚链各节点处张力的递推公式,利用MATLAB软件迭代验证,最后得到了较为准确的结果。
针对问题二,基于问题一建立的模型,得出在题设条件下,浮标系统已不处于最优工作状态,须通过改变重物球来对系统进行调节。
计算出临界条件下重物球的质量,利用MATLAB拟合得到的重物球重力与钢桶倾斜角度之间的关系曲线,得出对重物球进行调整的范围。
针对问题三,首先求得极端环境条件下钢桶倾角仍满足约束条件时候的重物球质量,然后通过合理的假设,在问题一建立的模型基础上,改变算法的迭代约束条件,从而得出不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
关键词:系泊系统;集中质量的多边形近似法;MATLAB;迭代一、问题的重述1.1问题的背景随着各国不断加大对海洋事业的投入以及不断深入对海底观测领域的探索,各海洋研究机构和海洋管理部门都相继建立了符合自身业务需求的海洋观测系统,其中浮标系统、系泊系统和水声通讯系统组成了近浅海观测网的传输节点。
而影响其系泊系统工作效果的因素很多,例如水流力、海风和水深等。
系泊系统的设计问题就是根据这些影响因素确定锚链的型号、长度和重物球的质量,使得系泊系统处于最佳工作状态。
从国家海洋资源战略角度来讲,研究各因素对系泊系统的不同影响显得尤为重要。
1.2问题的提出问题一:将该型传输节点布放在水深18m、海床平坦、海水密度为1.025某103kg/m3的静止海域时,选用II型电焊锚链22.05m,质量为1200kg的重物球,分别计算海面风速为12m/和24m/时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题二:在问题一的假设下,计算海面风速为36m/时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
FPSO单点系泊系统的电气与仪控系统设计FPSO(Floating Production Storage and Offloading)是一种用于海上油田开发的浮式生产、储存和卸载装置。
FPSO单点系泊系统是对FPSO进行安全稳定系泊的重要部分。
其中,电气与仪控系统的设计对FPSO的安全运行具有至关重要的作用。
本文将详细介绍FPSO单点系泊系统的电气与仪控系统设计。
首先,在FPSO单点系泊系统的电气设计中,主要考虑保证系统的安全性、可靠性和高效性。
为了实现这一目标,首先需要对FPSO的功率需求进行详细分析和计算。
根据FPSO的类型和功能,确定各种设备的功率需求,并合理配置电气设备,如发电机、电缆、变压器、配电盘等,确保满足FPSO的供电需求。
其次,在FPSO单点系泊系统的仪控设计中,需要考虑的主要是对系统的监测、控制和保护。
一方面,需要通过传感器实时监测FPSO的各项参数,如温度、压力、液位等,以便及时获取运行状态和故障信息。
另一方面,需要设计合理的控制系统,对FPSO的各个设备和系统进行精确控制,以保证系统的正常运行。
此外,还需要设置有效的保护装置,并与系统的监控和控制系统相结合,实现对FPSO的全面保护。
在FPSO单点系泊系统的电气与仪控系统设计中,还需要考虑到系统的可维护性。
随着FPSO在海上运行时间的增长,各种设备和系统都会出现磨损、老化和故障等问题。
因此,在设计阶段就应考虑到设备的易用性和可维修性,合理布置设备和电缆,确保维修和更换设备的便捷性,以降低维修成本和提高系统的可靠性。
此外,对于FPSO单点系泊系统的电气与仪控系统设计来说,还需要充分考虑安全性。
FPSO作为海上生产设施,必须具备高度的安全性能。
在设计电气与仪控系统时,需要在系统中设置各种安全装置,如短路保护、过流保护、漏电保护等,确保系统的安全运行。
此外,还需要考虑到设备的防火性能和防爆性能,选择适当的防火和防爆设备,以应对可能出现的安全事故。