系泊系统的设计与建模2016
- 格式:pdf
- 大小:1.24 MB
- 文档页数:27
系泊系统的设计:系泊系统数学建模系泊系统的设计摘要本文对系泊系统的设计问题进行了分析,给出合理的假设,建立优化模型,巧妙地解决了题目中所提出的问题。
针对问题一,首先采用集中质量的多边形近似法对单点系泊系统进行静力学分析,结合单点浮标系统特性,建立单点浮标的静力学模型,并对其算法进行改进,使算法能够迭代修正浮标受到的浮力。
其次通过适当的假设列出平衡方程并求解,得出锚链各节点处张力的递推公式,利用MATLAB软件迭代验证,最后得到了较为准确的结果。
针对问题二,基于问题一建立的模型,得出在题设条件下,浮标系统已不处于最优工作状态,须通过改变重物球来对系统进行调节。
计算出临界条件下重物球的质量,利用MATLAB 拟合得到的重物球重力与钢桶倾斜角度之间的关系曲线,得出对重物球进行调整的范围。
针对问题三,首先求得极端环境条件下钢桶倾角仍满足约束条件时候的重物球质量,然后通过合理的假设,在问题一建立的模型基础上,改变算法的迭代约束条件,从而得出不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
关键词:系泊系统;集中质量的多边形近似法;MATLAB;迭代一、问题的重述1.1问题的背景随着各国不断加大对海洋事业的投入以及不断深入对海底观测领域的探索,各海洋研究机构和海洋管理部门都相继建立了符合自身业务需求的海洋观测系统,其中浮标系统、系泊系统和水声通讯系统组成了近浅海观测网的传输节点。
而影响其系泊系统工作效果的因素很多,例如水流力、海风和水深等。
系泊系统的设计问题就是根据这些影响因素确定锚链的型号、长度和重物球的质量,使得系泊系统处于最佳工作状态。
从国家海洋资源战略角度来讲,研究各因素对系泊系统的不同影响显得尤为重要。
1.2问题的提出问题一:将该型传输节点布放在水深18m、海床平坦、海水密度为1.025×103kg/m3的静止海域时,选用II型电焊锚链22.05m,质量为1200kg的重物球,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
系泊系统的设计数学建模以系泊系统的设计数学建模为标题,我们来探讨一下该系统的数学建模方法。
系泊系统是指将船只或其他浮动物体固定在水中的一种装置。
在设计系泊系统时,需要考虑到多种因素,如风、波浪、潮流等。
为了确保系泊系统的安全性和稳定性,需要进行数学建模,以便分析和预测系统的行为。
我们可以考虑船只与锚之间的力学关系。
船只受到来自风、波浪和潮流等外力的作用,而锚通过拉力将船只固定在水中。
我们可以使用牛顿第二定律来描述船只的运动状态。
假设船只的质量为m,加速度为a,外力的合力为F,那么可以得到以下公式:F = ma。
接下来,我们需要考虑锚链的力学特性。
锚链是连接船只和锚的重要部分,它承受着船只在水中的运动引起的张力。
我们可以使用弹簧模型来描述锚链的特性。
假设锚链的弹性系数为k,长度为l,弹性形变为x,那么可以得到以下公式:F = kx。
除了船只和锚链的力学特性,我们还需要考虑水流的影响。
水流会给船只和锚链施加额外的力,从而影响系统的稳定性。
我们可以使用流体力学的知识来描述水流的特性。
假设水流的速度为v,密度为ρ,船只的受力面积为A,那么可以得到以下公式:F = ρAv。
在数学建模中,我们还需要考虑到船只的姿态稳定性。
船只在水中的姿态受到风、波浪和潮流等因素的影响,如果船只的姿态不稳定,就会导致系泊系统的不稳定。
我们可以使用刚体力学的知识来描述船只的姿态稳定性。
假设船只的质量矩阵为I,角加速度为α,扭矩为τ,那么可以得到以下公式:τ = Iα。
我们还需要考虑到船只与锚链之间的相互作用。
船只的运动会引起锚链的张力变化,而锚链的形变又会对船只的运动产生影响。
我们可以使用动力学的知识来描述船只和锚链之间的相互作用。
假设船只和锚链之间的相互作用力为F,船只的加速度为a,锚链的弹性形变为x,那么可以得到以下公式:F = ma = kx。
通过以上的数学建模,我们可以对系泊系统的行为进行分析和预测。
我们可以通过求解上述公式,得到船只、锚链和水流之间的关系,并进一步优化系统的设计,以提高系统的安全性和稳定性。
系泊系统的设计摘要对于问题一,建立模型一,已知题目给出的锚链长度与其单位长度的质量,得到悬链共210环。
对各节锚链,钢桶,四节钢管受力分析得出静力平衡方程,使用分段外推法,可以得到静力平衡下的迭代方程。
其中锚对锚链的拉力大小方向为输入变量,迭代的输出变量为浮标的位置和对钢管的拉力,在给定的风速下,输入和输出满足关系2)2(25.1cos 水v h T -=α,αθcos cos 11T T =,通过多层搜索算法得出最符合的输入输出值,即可得到给定风速下浮标的吃水深度,浮标拉力、锚链与海床夹角。
利用MATLAB 软件编程求解模型得到:风力12m/s 时,钢桶与竖直方向上的角度1.9863度,从下往上四节钢管与竖直方向夹角为1.9652度、1.9592度、1.9532度、1.9472度,浮标吃水0.7173m ,以锚为圆心浮标的游动区域16.5125m ,锚链末端切线与海床的夹角3.8268度。
风力24m/s 时,锚链形状,钢桶与竖直方向上的夹角3.9835度,从下往上四节钢管与竖直方向夹角为3.9420度、3.9301度、3.9183度、3.9066度,浮标吃水0.7244m ,以锚为圆心浮标的游动区域18.3175m 。
锚链末端切线与海床夹角15.9175度。
对于问题二的第一小问,使用模型一求解,当风速36m/s 时,锚链末端切线与海床夹角26.3339度,浮标吃水0.7482m ,浮标游动区域为以锚为圆心半径为18.9578m 的圆形区域,从下往上四节钢管与竖直方向倾斜角度为8.4463度、8.4225度、8.3989度、8.3753度,钢桶与竖直方向倾斜角度为8.5294度。
为满足问题二的要求,在模型一的基础上把重物球质量作为变量,建立模型二,将钢桶倾斜角小于5度和锚链前端夹角小于16度当做两个约束条件,通过MATLAB 编程求解得到满足约束条件要求的重物球质量取值范围为3700kg 到5320kg 。

2016年数学建模竞赛A题优秀论文基于力学分析的系泊系统设计摘要关于系泊系统的设计问题,需要对稳态下的各个物体进行受力分析和力矩分析,建立力学分析模型来求解问题。
针对问题1,先对稳态下的各个物体进行受力分析和力矩分析,建立满足受力平衡和力矩平衡的力学模型。
再以浮标的吃水深度为搜索变量,采用二分法,计算海水深度为18m时所对应的吃水深度和各物体的倾角。
利用MATLAB软件求解可得,风速为12m/s时,钢桶与竖直方向的夹角为1.2319°,钢管与竖直方向的夹角依次为1.2064°,1.2064°,1.2148°,1.2233°。
浮标的吃水深度和游动半径分别为0.6715m,14.6552m。
风速为24m/s时,钢桶夹角为4.6763°,钢管夹角依次为4.5360°,4.5836°,4.6141°,4.6450°;浮标的吃水深度和游动半径分别为0.6857m,17.7614m。
针对问题2,可利用问题1中建立的数学模型,利用MATLAB进行求解,可得风速为36m/s时,钢桶夹角9.6592°;钢管夹角依次为9.4814°,9.4814°,9.5399°,9.5992°;浮标的吃水深度和游动半径分别为0.7086m,18.4906m;最后一节锚链与水平面的夹角为20.9997°故以钢桶夹角小于5°和锚链夹角小于16°为约束条件,逐步增加重物球的质量,采用二分法向水深18m进行逼近。
当重物球的质量为2280kg时,浮标的吃水深度为0.9848m;钢桶夹角为4.4737°;锚链夹角为15.9748°;为使通讯设备的工作效果增强,重物球的质量可以在2280kg的基础上进行适当增加。
针对问题3,可在问题1的受力分析时加入水流力的作用,以最大风速36m/s,最大水流速度1.5m/s为设计指标,通过控制单一变量的方式可确定链条的型号为Ⅴ型的电焊锚链。

赛区评阅编号(由赛区组委会填写):2016年高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或资料(包括网上资料),必须按照规定的参考文献的表述方式列出,并在正文引用处予以标注。
在网上交流和下载他人的论文是严重违规违纪行为。
我们以中国大学生名誉和诚信郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。
如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号(从A/B/C/D中选择一项填写):我们的报名参赛队号(12位数字全国统一编号):参赛学校(完整的学校全称,不含院系名):参赛队员(打印并签名) :1.2.3.指导教师或指导教师组负责人(打印并签名):(指导教师签名意味着对参赛队的行为和论文的真实性负责)日期:年月日(请勿改动此页内容和格式。
此承诺书打印签名后作为纸质论文的封面,注意电子版论文中不得出现此页。
以上内容请仔细核对,如填写错误,论文可能被取消评奖资格。
)赛区评阅编号(由赛区组委会填写):2016年高教社杯全国大学生数学建模竞赛编号专用页送全国评阅统一编号(赛区组委会填写):全国评阅随机编号(全国组委会填写):(请勿改动此页内容和格式。
此编号专用页仅供赛区和全国评阅使用,参赛队打印后装订到纸质论文的第二页上。
注意电子版论文中不得出现此页。
)系泊系统的设计和探究摘要本文利用牛顿力学定律,力矩平衡原理、非线性规划、循环遍历法等方法对系泊系统进行了设计与探究。

系泊系统的设计摘要:系泊系统不论是在船舶航行,还是在海洋资源的综合利用与开发中,均得到了广泛应用,因而,系泊系统的设计问题十分具有现代意义。
本文隔离系统各组成部分,逐一进行受力分析和力矩分析,构造相应的刚体力学方程组,并根据海水深度联系各参数最终建立系泊系统状态模型。
关键词:系泊系统状态模型;受力平衡;力矩平衡0引言当海面风速一定且海水静止时,系泊系统的状态,即钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域与系泊系统各部分之间的受力平衡和力矩平衡以及海水深度的约束密切相关。
因此,可以隔离该系统的各组成部分,逐一进行力学分析,并最终根据海水深度,联系各参数建立系泊系统状态模型。
具体数值参考2016年高教社杯全国大学生数学建模竞赛A题。
系泊系统可分为浮标、钢管、钢桶和重物球、锚链四个部分,由题中锚链长度和型号计算得锚链共有210个链环,为了方便表述,对系统内部由上到下的构件进行标记:表1 各构件编号1力学方程与模型的建立1.1对浮标的力学分析[1]漂浮在水面上的浮标,受到来自水平方向的风力、海水对它的浮力、其余组件对它作用力以及自身的重力,与夹角为。
已知浮标的高为,质量为,直径为,海水的密度为,设浮标的吃水深度为,根据重力、浮力公式,以及近海风荷载的近似计算公式,可得。
此时,浮标受到速度为的海风作用在海面上达到平衡,受力分解后,其在水平方向和垂直方向的受力均平衡。
于是整理可得关于浮标的完整的刚性力学方程组[2]。
其中,其在竖直面的投影高度即为浮标的吃水深度。
1.2对钢管的力学分析没入水中的钢管,由于海水静止,因此忽略水流力水平方向的作用。
以与浮标相接的第一节钢管为例,其受到浮标对它的反作用力、其余组件对它的作用力、海水对它的浮力以及自身的重力。
为保持力矩平衡,钢管不发生旋转的现象,浮标对它的反作用力应相对于它的中心轴更偏向竖直方向。
此时有相对于竖直方向的夹角与和的夹角相等,即:,根据牛顿第三定律:。
模型假设假设所有的材料都是普通钢材,,普通钢材的密度直接按照铁的密度计算,即所有材料密度为7.9×103kg/m3。
问题分析问题总分析:本题最关键的就是讨论出系泊系统中各个参数之间的关系。
我们把系泊系统中的锚链、钢管和钢桶的每一段,都看作是一条理想的杆,再对每一段杆进行受力分析,通过对每根杆分析受力平衡和力矩平衡,得出递推关系,建立差分方程;再利用二分法确定差分方程的初值,从而解出每段杆各个参数的值。
问题一的分析:先对每段理想的杆进行受力分析,和力矩平衡分析,得到拉力以及夹角的差分递推关系,得T的大小和方向,就能计算得到整个系泊系统的状态。
再知只要知道第一根杆受到的拉力1分析第一根理想杆即浮标的受力情况,得知它受到的拉力又由浮标吃水深度f决定,最后利用二分法确定f,从而得到整个系泊系统的状态。
问题二的分析:在问题一的假设上,风速变为36m/s,利用同样的方法求解,求得海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
为使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度,我们从1200逐步增加重物球的重量,观察两个角度的大小变化,得到重物球质量的下限;接着再考虑浮标的吃水深度问题,因浮标不能完全浸入水中,计算得到重物球的质量的上限。
问题三的分析:要考虑风力、水流力和水深情况下的系泊系统设计,就是要确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
为了确定锚链的型号,先分析在极端情况,即水深20m,海水速度为1.5m/s,风速36m/s的情况下的锚链在锚点与海床的夹角为16度附近需要锚链长度较短的锚链。
再以这个最短锚链长度为例,求对应的重物球质量范围,使得锚链在锚点与海床的夹角不超过16度,钢桶的倾斜角度不超过5度,并使得浮标不能完全浸没在水中。
最后给出一个特定取值状态下系泊系统的状态。
符号说明模型建立与求解模型准备:对第i根杆的受力进行分析,如图1:图1将受力分析图简化成图2:图2i B F 为第i 根杆受到的重力i G 和浮力i B 的合力,定义竖直向上的方向为正方向,则i B F 为负值。
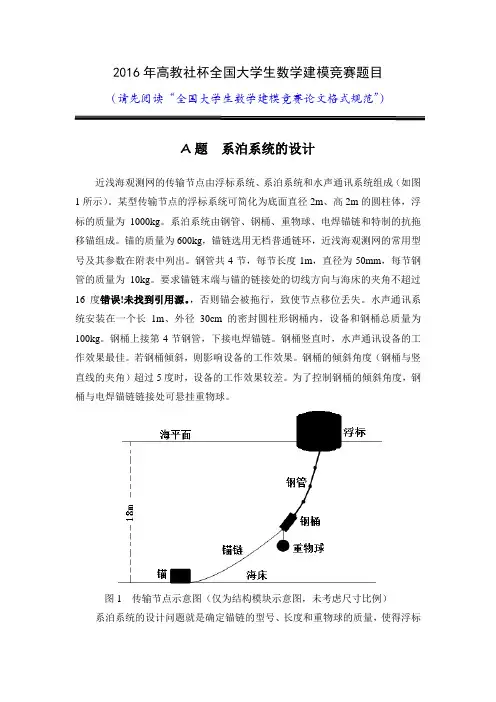
2016年高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题系泊系统的设计近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度错误!未找到引用源。
,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
钢桶上接第4节钢管,下接电焊锚链。
钢桶竖直时,水声通讯设备的工作效果最佳。
若钢桶倾斜,则影响设备的工作效果。
钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。
为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
图1 传输节点示意图(仅为结构模块示意图,未考虑尺寸比例)系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。
现将该型传输节点布放在水深18m、海床平坦、海水密度为1.025×103kg/m3的海域。
若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。
系泊系统的设计引言系统设计是软件开发中的重要环节,它涉及到对系统的整体架构、模块划分以及数据流向等进行详细规划。
本文将对一个系泊系统的设计进行介绍,包括系统的功能、设计原则以及关键模块的实现细节。
系泊系统的功能系泊系统是用于管理船只的停靠与起锚过程的系统。
其主要功能包括:1.记录船只的进港与启航时间:系统能够记录船只进港与启航的时间,方便管理者了解各个船只的停靠情况。
2.船只管理:系统能够对不同船只进行管理,包括船只的基本信息、停靠记录等。
3.系泊位管理:系统能够管理系泊位的使用情况,包括空闲状态、船只类型限制等。
4.船只调度:系统能够根据船只的进港与启航时间,进行船只的调度,确保系泊位的充分利用。
设计原则在进行系泊系统的设计时,需要遵循以下原则:1.模块化设计:系统应该进行模块化设计,将不同的功能拆分为独立的模块,提高系统的可维护性与可扩展性。
2.数据一致性:系统中的数据应该保持一致性,在进行船只调度等操作时,需要保证系泊位的状态与船只的状态一致。
3.异常处理:系统应该能够处理各种异常情况,如船只进港时间冲突、系泊位已满等情况,给出合理的提示与处理方案。
系泊系统的设计实现数据模型设计在设计系泊系统时,首先需要确定系统的数据模型。
以下是一个简化的数据模型示例:数据模型示例数据模型示例1.船只(Ship)表记录了船只基本信息,包括船只的名称、类型等。
2.系泊位(Berth)表记录了系泊位的基本信息,包括编号、状态等。
3.停靠记录(DockingRecord)表记录了船只的进港与启航时间,以及相关联的船只与系泊位信息。
系统架构设计系泊系统的整体架构可以分为以下几个模块:1.前端界面:负责与用户进行交互,展示船只与系泊位信息并提供相应的操作界面。
2.业务逻辑层:负责处理用户请求,进行船只调度、系泊位管理等操作。
3.数据访问层:负责与数据库进行数据的读写操作。
4.数据库:存储系统的数据。
系泊系统的关键模块实现细节1.船只进港与启航时间记录:当船只进港或启航时,系统会记录相应的时间并更新相关信息。
系泊系统的设计数学建模以系泊系统的设计数学建模为标题,本文将介绍系泊系统设计中的数学建模方法和相关原理。
系泊系统是指用于固定船舶或浮动结构物的一种装置,常用于码头、船坞、海上石油平台等场所。
在设计系泊系统时,需要考虑到各种因素,如海浪、风力、船舶质量等。
数学建模是一种将现实问题转化为数学模型的方法,通过建立适当的数学模型,可以对系泊系统进行分析和优化设计。
对于系泊系统中的海浪和风力等外部环境因素,可以使用波浪理论和风力学原理进行数学建模。
波浪理论可以描述海浪的传播和幅度,通过建立波浪模型可以计算出海浪对系泊系统的作用力。
风力学原理可以描述风力对系泊系统的作用,通过建立风力模型可以计算出风力对系泊系统的作用力。
这些外部环境因素的数学建模可以帮助设计者预测系泊系统在不同环境条件下的稳定性。
对于系泊系统中的船舶质量和系泊装置的特性,可以使用力学原理进行数学建模。
船舶质量可以分解为重力和浮力两部分,通过建立重力和浮力模型可以计算出船舶的质量。
系泊装置的特性可以通过建立弹性力学模型来描述,可以计算出系泊装置对船舶的支撑力和阻尼力。
这些力学模型的数学建模可以帮助设计者评估系泊系统的稳定性和可靠性。
对于系泊系统的优化设计,可以使用优化算法进行数学建模。
优化算法可以通过建立目标函数和约束条件,来寻找最优的系泊系统设计方案。
通过数学建模和优化算法,设计者可以在考虑各种因素的基础上,找到最合适的系泊系统设计方案,以提高系统的稳定性和安全性。
系泊系统的设计数学建模是一种重要的工具和方法,可以帮助设计者在考虑各种因素的基础上,进行系统的分析和优化设计。
通过建立适当的数学模型和使用优化算法,可以提高系泊系统的稳定性和可靠性,为实际工程应用提供科学依据。
系泊系统的设计摘要本文详细对系泊系统的各个机构进行了力学分析,针对系泊系统的要求,建立优化模型,求解系泊系统在多种环境下的最优解,使得浮标游动范围,吃水程度和钢桶倾斜角度尽可能的小。
针对问题一,本文对系泊系统的受力及力矩进行了分析,基于浮标倾斜的考虑,得到了平衡状态下关于受力平衡及力矩平衡的方程组。
由于方程组数量较多及相互影响的特点,直接求解十分困难。
因此我们考虑以浮标两边的浸水长度,h h为变量,12利用搜索算法对方程组进行求解,并得到相应的结果。
如当风速为12m/s时,钢桶的倾斜角度1.0405°,从上到下钢管的倾斜角度分别为1.0086°、1.0146°、1.0206°、1.0267°,浮标吃水深度0.735m,浮标游动区域半径14.4429m。
针对问题二,首先将风速为36m/s的情况代入问题一建立的模型中,但是得到的结果不满足题目所给定的要求。
则考虑在重物球质量一定的条件下,以浮标的吃水深度和游动区域及钢桶的倾斜角为目标,建立了一个单决策变量的多目标最优系泊模型,相比于问题一,此问的变量更多,更加难于求解,故考虑将多目标转化成单目标的问题进行求解,并继续使用搜索法对问题进行求解。
最后找到了三组可行解,其中最优解是重力球的质量为2102kg.针对问题三,本文中有三个决策变量以及三个变系数,相比于前两问,无论是计算量还是计算维数,难度更大。
为了求解该问,建立了一个多决策变量的多目标变系数的最优系泊系统模型,为了简便运算,我们建立了变步长的搜索算法,并最终求解得到结果,得到的一组解为:选用了III型号的锚链,重物球质量为2800kg,锚链长度为23.4m。
针对论文的实际情况,对论文的优缺点做了评价,文章最后还给出了其他的改进方向,以用于指导实际应用。
关键词:系泊系统设计;力的平移定理;多目标;优化模型;搜索算法1.问题的重述一个由浮标系统、系泊系统和水声通讯系统组成的近浅海观测网的传输节点。
系泊系统的设计数学建模一、引言系泊系统是一种常见的海洋工程设施,用于将船只或其他海洋结构物固定在水面或水下的一种装置。
设计一个高效可靠的系泊系统对于确保船只安全停靠以及海洋工程设施的稳定非常重要。
本文将介绍系泊系统设计的数学建模方法,通过数学模型来分析和优化系泊系统的设计。
二、系统建模1. 系泊系统的力学模型系泊系统的力学模型是研究系泊系统的基础。
通过力学原理和静力学平衡条件,可以建立系泊系统的力学方程。
其中包括各个力的平衡方程、物体的运动方程等。
通过求解这些方程,可以得到系泊系统的各个参数,如系泊绳的张力、浮标的位置等。
2. 系泊系统的动力学模型系泊系统在海洋环境中受到风浪等外界力的作用,因此需要考虑系统的动力学特性。
通过建立动力学模型,可以分析系泊系统的振动特性和响应能力。
常用的方法包括振动方程的建立和求解、频域分析等。
通过分析动力学模型,可以得到系泊系统的自然频率、阻尼比等参数。
三、优化设计1. 系泊系统的参数选择在设计系泊系统时,需要选择合适的参数,如系泊绳的长度、材料、直径等。
通过数学模型,可以分析不同参数对系泊系统性能的影响,从而选择最佳的参数组合。
例如,通过分析系泊绳的长度与稳定性的关系,可以确定最佳的系泊绳长度。
2. 系泊系统的布置方式系泊系统的布置方式也对系统性能有重要影响。
通过数学模型,可以分析不同布置方式对系统稳定性、抗风浪性能等的影响。
例如,通过分析不同锚点数量和位置的影响,可以选择最佳的系泊系统布置方式。
四、案例分析以某港口停泊船只的系泊系统设计为例,利用数学建模方法对系统进行优化设计。
通过建立力学模型和动力学模型,分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,得到最佳的系泊系统设计方案。
五、结论通过数学建模方法,可以对系泊系统的设计进行分析和优化。
通过建立力学模型和动力学模型,可以分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,可以得到最佳的系泊系统设计方案。
系泊系统的设计摘要本文为系泊系统的设计问题,根据题目要求建立了数学模型,计算出系泊系统在不同条件下的具体参数,并利用模型对系泊系统进行优化分析,使其能运用到更广的领域。
针对问题一,首先分析了锚链的形状,利用微积分原理求出锚链的静态方程,用Matlab 画出锚链形状,得出锚链的形状所符合悬链线方程。
然后把钢管、钢桶看成一个整体,并忽略钢管和钢桶倾斜引起的锚链上端高度的变化,分析出锚链的长度和锚链末端与海平面的夹角对吃水深度的影响,又对钢桶、钢管和浮标进行了受力和力矩分析。
最后建立了数学模型,计算出风速为12m/s 和24m/s 时,钢桶和各节钢管的倾斜角度(见表2),浮标吃水深度分别为0.737m 、0.752m ,浮标的浮动区域(此浮动区域是以锚为圆心的圆)面积分别为、,锚链的形状如图(5-11)、(5-12)所示。
针对问题二,由问题一中建立的系泊系统的模型,计算风速为36m/s 时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
得到了钢桶和各节钢管的倾斜角度如(表3),浮标吃水深度:0.787m ,以及游动区域面积:1229.39m 。
由于重物球的质量变化影响锚点与海床的夹角,可以通过调节重物球的质量控制锚点与海床的夹角。
分析得出当锚点与海床的夹角处于临界点(即16度)时,重物球的最小质量为1756.8kg ;当浮标刚好没入水中时,重物球的最大质量为5335.8kg 。
针对问题三,以钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域为目标函数,分析动态优化问题。
与问题一、二不同的是:此问题给定了水深、海水速度、风速的取值范围,属于模型动态变化问题。
所以对模型进行了动态分析,求得钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域的取值范围,进而分析水深、海水速度、风速对结果的影响,这有利于系泊系统的调整和应用。
本文所建立的模型对相关问题在理论上作了证明,虽然对部分模型进行了简化,但是实用性很强,而且易于推广,能够扩展到其他系泊系统。