北航理论力学动力学5A
- 格式:pptx
- 大小:3.76 MB
- 文档页数:37

北航机械考试大纲971,972,973考研之路 2007-10-20 09:02:45 阅读295 评论0字号:大中小971机械工程专业综合(1)考试大纲(2008版)一、考试组成971机械工程专业综合(1)共分三部分:理论力学(动力学)、机械原理和自动控制原理,各占试卷总量的三分之一,满分各为50分。
二、理论力学(动力学)部分的考试大纲(一)参考教材1.《动力学》(第2版)1-7章谢传锋主编,高等教育出版社(二)主要内容及基本要求1. 质点动力学⑴ 质点运动学(在直角坐标系和自然轴系下描述、点的复合运动)⑵ 质点动力学方程(在惯性系和非惯性系中表示)、⑶ 点的复合运动初步掌握上述内容的概念、分析的基本方法和思路。
2. 质点系动力学⑴ 动量定理⑵ 变质量质点动力学基本方程⑶ 对定点和动点的动量矩定理⑷ 动能定理掌握上述内容的定理、基本方程,特别是各种问题的分析方法。
3. 刚体动力学I、动静法⑴ 刚体平面运动的运动学和动力学⑵ 达朗贝尔原理(惯性力的简化、动静法、动平衡与静平衡)4. 刚体动力学II、拉格朗日方程⑴ 拉格朗日方程⑵ 动力学普遍方程⑶ 动力学II(刚体的定点运动与一般运动的运动学与动力学)5. 振动基础⑴ 单自由度系统的振动在掌握必要的基础知识外,重点是能够有建立力学、数学模型及提出问题和分析解决问题的能力,掌握定性分析和定量分析的方法。
三、机械原理部分的考试大纲(一)参考教材1.《机械设计基础》(下册)第17—24章吴瑞祥等主编,北京航空航天大学出版社或《机械原理教程》申永胜清华大学出版社(二)考试内容及基本要求本考试内容的章节是依据参考教材[1]编制的,参考教材[2]的内容与此基本相同,只是章节编号有所差异。
第17章机构的组成和结构17.1 机构的组成17.2 机构运动简图及其绘制17.3 构件的自由度与运动副的约束17.4 平面运动链的自由度及其计算及自由度计算时应注意的事项17.5 运动链成为机构的条件17.6 机构的组成原理与结构了解机构的组成要素,掌握机构运动简图的绘制方法。

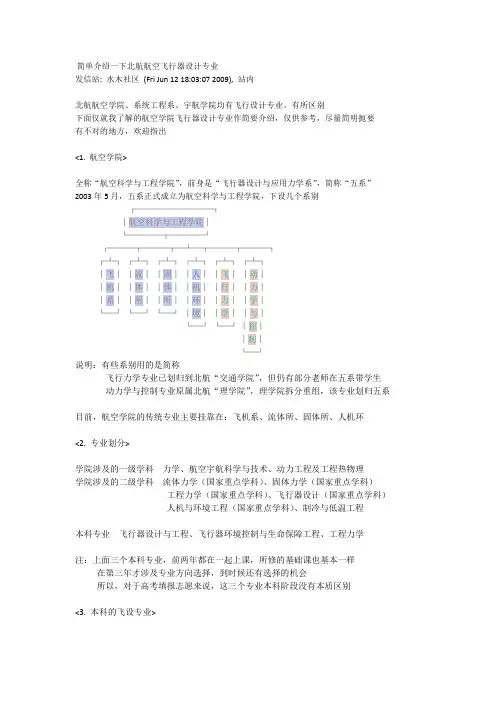
简单介绍一下北航航空飞行器设计专业发信站: 水木社区(Fri Jun 12 18:03:07 2009), 站内北航航空学院、系统工程系、宇航学院均有飞行设计专业。
有所区别下面仅就我了解的航空学院飞行器设计专业作简要介绍,仅供参考,尽量简明扼要有不对的地方,欢迎指出<1. 航空学院>全称“航空科学与工程学院”,前身是“飞行器设计与应用力学系”,简称“五系”2003年5月,五系正式成立为航空科学与工程学院,下设几个系别┌─────────┐│航空科学与工程学院│└────┬────┘┌───┬───┬─┴─┬───┬───┐┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐│飞││流││固││人││飞││动││机││体││体││机││行││力││系││所││所││环││力││学│└─┘└─┘└─┘│境││学││与│└─┘└─┘│控││制│└─┘说明:有些系别用的是简称飞行力学专业已划归到北航“交通学院”,但仍有部分老师在五系带学生动力学与控制专业原属北航“理学院”,理学院拆分重组,该专业划归五系目前,航空学院的传统专业主要挂靠在:飞机系、流体所、固体所、人机环<2. 专业划分>学院涉及的一级学科力学、航空宇航科学与技术、动力工程及工程热物理学院涉及的二级学科流体力学(国家重点学科)、固体力学(国家重点学科)工程力学(国家重点学科)、飞行器设计(国家重点学科)人机与环境工程(国家重点学科)、制冷与低温工程本科专业飞行器设计与工程、飞行器环境控制与生命保障工程、工程力学注:上面三个本科专业,前两年都在一起上课,所修的基础课也基本一样在第三年才涉及专业方向选择,到时候还有选择的机会所以,对于高考填报志愿来说,这三个专业本科阶段没有本质区别<3. 本科的飞设专业>飞行器设计专业,以力学背景为基础,并接受航空方面的专业基础知识培养重要的课程:高等数学、线性代数、工程数学等- 数学基础材料力学、理论力学、空气动力学、结构力学、振动学基础等- 力学基础飞行动力学、飞行器结构设计、总体设计等- 专业基础航空航天概论、航空实践课程- 科普当然,课程远不止这些,上述只是跟飞设专业相关的一些基础课大三暑假有下厂实习的环节;大三、大四有课设和实践环节,比如设计制作小飞机等学校有冯如杯科技竞赛,有些项目是老师出题目,招本科学生来做也算是一个本科阶段接触科技实践的机会<4. 本科毕业去向>读研。
第一次习题课讲义第一次习题课分为两部份内容,第一部份是两个作业题,用意通过它们讲述作业中所发觉和需要解决的问题,第二部份是六个习题,用意通过它们介绍解题的思路、方式和解题步骤。
而整个习题课围绕“关联”的概念,讲述已知运动信息与待求运动信息间的关联,并有次形成解题的契机,稳扎稳打,直至取得最终结果。
下面即是本次习题课的要紧内容。
不管是在理论力学仍是数学,抑或是物理等其它学科中,碰着一个问题,第一步是分析问题,分析问题性质,找出待求量与已知信息间的关联,然后依照不同的问题性质,用相应的方式予以解决。
在而事实上任何问题的分析方式也都大同小异,重要的在于总结,对不同类的问题进行归纳整理,使相应问题的基础和方式系统化、层次化。
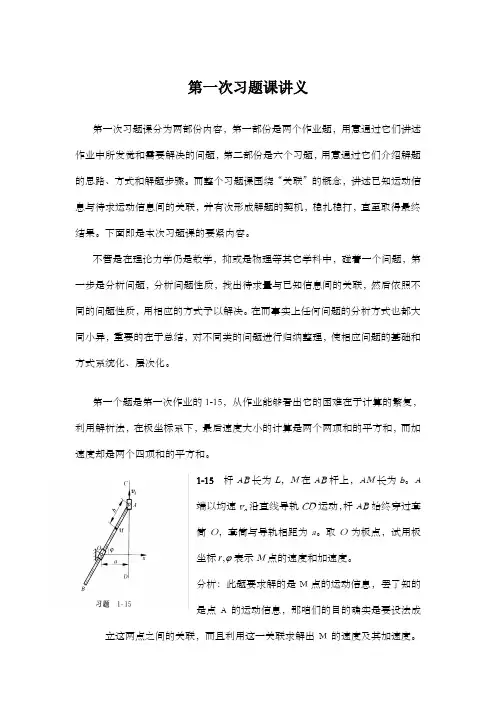
第一个题是第一次作业的1-15,从作业能够看出它的困难在于计算的繁复,利用解析法,在极坐标系下,最后速度大小的计算是两个两项和的平方和,而加速度却是两个四项和的平方和。
1-15杆AB长为L,M在AB杆上,AM长为b。
A端以均速v A沿直线导轨CD运动,杆AB始终穿过套筒O,套筒与导轨相距为a。
取O为极点,试用极坐标 ,r表示M点的速度和加速度。
分析:此题要求解的是M点的运动信息,罢了知的是点A的运动信息,那咱们的目的确实是要设法成立这两点之间的关联,而且利用这一关联求解出M的速度及其加速度。
而且此题明确了解题方式,那确实是极坐标法,因此问题确实是一个在极坐标方式中怎么描述点的运动的问题。
解:如下图,对A 点:()()()A A t t t ρρ=r e ……………A 点的极坐标表达式,概念式罢了对M 点:()()()M M t t t ρρ=r e ………….M 点的极坐标表达式,概念式罢了同时A 点和M 点在空间位置上的关系为:M A b ρρ=-……………………………点M 与点A 之间的关联从而有 ()()()M A t t b t ρ=-r r e 于是点M 的速度为()()sin (cos )M A A A t t b v v b ϕρϕϕϕϕϕ=-=+-v v e e e 这其实确实是第二章所讲的基点法于是点M 的加速度为22()()-()-()0M A M A t t b b t b b t ρϕρϕϕϕϕϕ⎫=+⇒=⎬=⎭a a e e a e e a…….…大小只是两项的平方和再求ϕϕ, 由几何关系可知:()cos A at ρϕ=ϕϕϕϕρsin cos sin )(2A A v a t =-=⇒av A ϕϕ2cos =再对ϕ求一次导: 232cos sin 2sin cos 2a v a v A A ϕϕϕϕϕϕ-=-=代入,M M v a 经运算可得:2224sin cos A M v a r a ϕϕ=+v 2322cos 13sin A Mbv aϕϕ=+a第二个题是第二次作业中的补充题2,重点在于分析定点运动中瞬时转动轴的确信及其角加速度的计算。
北航宇航学院飞行动力学考试大纲五篇第一篇:北航宇航学院飞行动力学考试大纲飞行动力学基础课程教学大纲第一章绪论(1学时)了解:飞行动力学在飞行器设计学科中的地位;本课程的任务、内容,讲述方法和特点。
第二章矢量与坐标变换(3学时)1.坐标变换及表示方法2.运动坐标系中矢量导数的描述方法3.坐标变换的变化率4.四元数理论及应用理解:坐标变换的作用。
掌握:姿态描述方法,坐标变换表示方法。
第三章质点系的动力学方程(4学时)1.质点系的运动方程2.刚体的运动方程3.质点相对运动的动力学方程理解:描述刚体运动的方法;建立刚体动力学方程的力学原理。
掌握:刚体运动的特点。
第四章分析力学基础(4学时)1.动力学普遍方程2.拉格朗日方程3.罗斯方程4.拟拉格朗日方程5.哈密顿正则方程理解:建立不同形式动力学方程的力学原理,各种方程的特点。
第五章凯恩方程(3学时)理解:建立凯恩方程的所基于的力学原理和方法,凯恩方程的优点和使用中存在的问题。
第六章空间运动几何与时间(1学时)1.地球的运动2.时间系统3.相关坐标系4.地球参考模型理解:基本概念。
第七章有翼导弹的运动方程(4学时)1.坐标系和运动变量的定义2.作用在导弹上的力和力矩3.导弹运动方程4.分析与求解流程掌握:常用姿态描述方法,建立动力学方程的方法,求解导弹运动的一般过程。
第八章滚转导弹的运动方程(2学时)1.坐标系和运动变量的定义2.作用在滚转导弹上的力和力矩3.滚转导弹的运动方程4.分析与求解流程掌握:滚转导弹姿态描述方法,建立动力学方程的方法,求解导弹运动的一般过程。
第九章运载火箭(弹道导弹)的运动方程(2学时)1.坐标系和运动变量的定义2.作用在火箭上的力和力矩3.质心运动方程4.姿态运动方程5.其它方程6.分析与求解流程掌握:坐标系的定义,火箭姿态描述方法,建立动力学方程的方法,求解导弹运动的一般过程。
第十章人造地球卫星的运动方程(5学时)1.中心引力运动2.二体问题3.Kepler轨道及其描述4.轨道摄动方程5.卫星的姿态运动方程拟拉格朗日方程的具体形式;刚体卫星的姿态运动;刚体+飞轮组合体卫星的姿态运动;刚体+单框架力矩陀螺组合体卫星的姿态运动;刚体+双框架力矩陀螺组合体卫星的姿态运动。

理论力学之静力学习题答案北航(总27页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除静力学(MADE BY 水水)1-3 试画出图示各结构中构件AB 的受力图F AxF A yF B(a)(a)F AF BF BF DF DF BxF ByF BxF CF BF CF By1-4 试画出两结构中构件ABCD 的受力图1-5 试画出图a 和b 所示刚体系整体合格构件的受力图1-5aF AxF A yF DF ByF AF BxF BF AF AxF A y F DyT EF CxF C yN’F BF DF A N F AF BF D1-5b1-8在四连杆机构的ABCD 的铰链B 和C 上分别作用有力F 1和F 2,机构在图示位置平衡。
试求二力F 1和F 2之间的关系。
解:杆AB ,BC ,CD 为二力杆,受力方向分别沿着各杆端点连线的方向。
解法1(解析法)假设各杆受压,分别选取销钉B 和C 为研究对象,受力如图所示: 由共点力系平衡方程,对B 点有:∑=0x F 045cos 02=-BC F F 对C 点有:∑=0x F 030cos 01=-F F BC解以上二个方程可得:22163.1362F F F ==F 2F BC F ABB45oy xF CD C60o F 130oF BCxy45030解法2(几何法)分别选取销钉B 和C 为研究对象,根据汇交力系平衡条件,作用在B 和C 点上的力构成封闭的力多边形,如图所示。
对B 点由几何关系可知:0245cos BC F F =对C 点由几何关系可知:130cos F F BC =解以上两式可得:2163.1F F =2-3 在图示结构中,二曲杆重不计,曲杆AB 上作用有主动力偶M 。
试求A 和C 点处的约束力。
解:BC 为二力杆(受力如图所示),故曲杆AB 在B 点处受到约束力的方向沿BC 两点连线的方向。
招生人数0801 力学080101 一般力学与力学基础009 理学院6研究方向:①101政治②201英语③301数学一④492理论力学01 多体系统与机器人动力学02 飞行器姿态动力学与控制03 非线性动力学080102 固体力学005 航空科学与工程学院32研究方向:①101政治②201英语③301数学一④451材料力学或492理论力学01 冲击动力学与轻质结构02 计算力学与结构动力学03 结构疲劳可靠性04 小样本技术与智能结构05 复合材料与断裂和损伤080103 流体力学005 航空科学与工程学院32研究方向:①101政治②201英语③301数学一④451材料力学或492理论力学01 飞行器空气动力学02 实验流体力学03 计算流体力学04 涡动力学080104 工程力学005 航空科学与工程学院5研究方向:①101政治②201英语③301数学一④451材料力学或492理论力学01 实验力学02 小样本技术应用0802 机械工程080201 机械制造及其自动化007 机械工程及自动化学院50北京航空航天大学招收硕士研究生专业目录一级学科、二级学科、院系所、研究方向考试科目备注研究方向:①101政治②201英语③301数学一④471机械工程专业基础01 计算机辅助设计与制造02 计算机数控与机电自动化03 智能加工及机电一体化技术04 计算机集成制造系统05 信息系统与企业信息化080202 机械电子工程003 自动化科学与电气工程学院20研究方向:①101政治②201英语③301数学一④433控制工程综合或434机械电子工程综合或436电子技术综合01 机电系统虚拟设计、计算机测控及仿真技术02 机电系统网络控制、综合管理及并行工程03 飞行器液压与人机操纵系统04 可靠性与冗余技术05 工业机器人与智能控制技术007 机械工程及自动化学院40研究方向:①101政治②201英语③301数学一④473机电工程专业综合01 数字图像处理与无损诊断02 工业测控网络技术03 机电控制及自动化04 机器人控制05 人机交互技术06 光机电一体化技术080203 机械设计及理论007 机械工程及自动化学院55研究方向:01 现代机械设计理论方法及CAD ①101政治②201英语③301数学一④471机械工程专业基础02 机械自动化系统设计与控制①101政治②201英语③301数学一④471机械工程专业基础03 先进机器人技术①101政治②201英语③301数学一④471机械工程专业基础04 机电系统虚拟样机设计①101政治②201英语③301数学一④471机械工程专业基础05 计算机图形学及科学计算可视化①101政治②201英语③301数学一④471机械工程专业基础06 工业设计①101政治②201英语③301数学一④472工业设计专业基础080204 车辆工程013 汽车工程系24研究方向:①101政治②201英语或202俄语或203日语③301数学一④442工程热力学或492理论力学或831工程流体力学01 汽车动力学及其控制02 汽车电子控制技术03 车身设计及汽车空气动力学04 汽车振动与噪声控制● 080221 工业与制造系统工程007 机械工程及自动化学院15研究方向:①101政治②201英语③301数学一④471机械工程专业基础01 计算机集成制造系统02 信息系统与企业信息化03 现代产品设计及系统优化04 生产管理与物流技术05 现代质量工程0803 光学工程080300 光学工程002 电子信息工程学院8研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或423光电类专业综合或424信息类专业综合01 声光信号处理与接收系统02 光信息传输与处理03 光电信息系统017 仪器科学与光电工程学院24研究方向:①101政治②201英语③301数学一④431自动控制原理或432控制理论综合或434机械电子工程综合或871光电技术01 光电测量与图象处理02 光学探测与制导技术03 先进光学传感技术04 集成光学与微光机电系统0804 仪器科学与技术080401 精密仪器及机械017 仪器科学与光电工程学51院研究方向:①101政治②201英语③301数学一④431自动控制原理或432控制理论综合或434机械电子工程综合或871光电技术01 航行器导航与控制02 自动化检测与智能仪器03 微机电系统技术04 图象识别与成像制导05 光纤陀螺及其导航系统080402 测试计量技术及仪器017 仪器科学与光电工程学60院研究方向:①101政治②201英语③301数学一④431自动控制原理或432控制理论综合或434机械电子工程综合或871光电技术01 先进传感技术与系统02 自动检测与智能仪器03 动态测试计量与校准04 计算机视觉与光电测量0805 材料科学与工程080501 材料物理与化学001 材料科学与工程学院28研究方向:①101政治②201英语或202俄语或203日语③302数学二④411物理化学01 材料表面物理与化学02 应用电化学与涂镀层技术03 材料腐蚀环境失效分析04 材料防护新技术05 清洁燃料009 理学院14研究方向:①101政治②201英语或203日语③302数学二④491固体物理01 新型功能材料与薄膜物理02 纳米材料的物理与化学03 生态环境材料04 碳/碳复合材料05 新型能源材料080502 材料学001 材料科学与工程学院70研究方向:01 高性能金属结构材料和特种陶瓷材料①101政治②201英语或202俄语或203日语③302数学二④411物理化学或491固体物理02 新型功能材料和薄膜科学与涂层技术①101政治②201英语或202俄语或203日语③302数学二④411物理化学或491固体物理03 计算材料学与材料设计①101政治②201英语或202俄语或203日语③302数学二④411物理化学或491固体物理04 新型高分子材料及先进树脂基复合材料①101政治②201英语或202俄语或203日语③302数学二④411物理化学05 材料失效分析及预测预防①101政治②201英语或202俄语或203日语③302数学二④411物理化学080503 材料加工工程001 材料科学与工程学院32研究方向:①101政治②201英语或202俄语或203日语③302数学二④411物理化学01 先进材料激光制备、快速成形与表面改性02 材料加工过程计算机控制与仿真03 凝固理论与技术及非平衡材料及其制备工艺04 高分子材料及复合材料成型技术05 等离子体法先进材料制备加工技术007 机械工程及自动化学院20研究方向:①101政治②201英语③302数学二④451材料力学或473机电工程专业综合01 材料加工过程控制与设备02 先进焊接技术及自动化03 热制造工艺建模与模拟04 装备结构制造及工艺可靠性05 材料表面覆层改性技术06 材料特种连接技术● 080521 信息功能材料001 材料科学与工程学院16研究方向:①101政治②201英语或202俄语或203日语③302数学二④411物理化学或491固体物理01 低维功能陶瓷材料02 薄膜材料与磁性材料03 功能材料设计与计算机模拟0807 动力工程及工程热物理080701 工程热物理004 能源与动力工程学院20研究方向:①101政治②201英语或202俄语或203日语③301数学一④441流体力学或442工程热力学01 传热传质学02 热流体力学与燃烧技术03 能源的有效利用与新能源开发04 热物理实验技术05 低温与制冷技术080702 热能工程004 能源与动力工程学院15研究方向:①101政治②201英语或202俄语或203日语③301数学一④441流体力学或442工程热力学01 高容热强度液雾燃烧02 低污染燃烧及环境控制03 冲压发动机流动与燃烧04 能量转换及利用技术05 计算燃烧学06 高效节能技术080703 动力机械及工程013 汽车工程系20研究方向:①101政治②201英语或202俄语或203日语③301数学一④442工程热力学或492理论力学或831工程流体力学01 燃烧与传热理论及技术02 结构分析及现代设计方法03 内燃机电子控制技术080704 流体机械及工程004 能源与动力工程学院15研究方向:①101政治②201英语或202俄语或203日语③301数学一④441流体力学或442工程热力学或443声学基础或451材料力学01 流体机械及流体动力学02 现代流体测控技术与实验模拟03 流体机械非定常流控制及气动声学04 流体机械及系统的优化设计与振动控制05 流体机械高温结构强度与可靠性080705 制冷及低温工程005 航空科学与工程学院10研究方向:①101政治②201英语③301数学一④452热工基础01 新型制冷及空调技术02 低温余热利用技术0808 电气工程080801 电机与电器003 自动化科学与电气工程10学院研究方向:①101政治②201英语③301数学一④435电气工程综合或436电子技术综合01 独立电源系统的计算机控制与测试02 电机与电器的控制技术03 新型、特种、智能化电机电器与电磁装置04 电机与电器测试技术05 电磁场理论及其应用080804 电力电子与电力传动003 自动化科学与电气工程16学院研究方向:①101政治②201英语③301数学一④435电气工程综合或436电子技术综合01 电力电子应用技术02 新型开关电源技术03 电力传动及其自动控制系统04 电力电子设备的测试05 电磁检测技术0809 电子科学与技术080900 电子科学与技术002 电子信息工程学院50(IC集成电路设计)培养费3.9万元研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或422交通信息类专业综合或423光电类专业综合或424信息类专业综合01 数模混合集成电路(SOC)设计、建模与应用02 数字集成电路设计03 集成电路器件设计、仿真及制造04 电路与系统设计自动化(EDA)05 射频电路与系统设计080901 物理电子学002 电子信息工程学院5研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或423光电类专业综合或424信息类专业综合01 光纤光学与光电信号处理02 声光信号处理03 成像信息技术04 激光空间信息技术080902 电路与系统002 电子信息工程学院30或203日语③301数学一④421通信类专业综合或424信息类专业综合01 电路设计自动化(EDA)02 数字通信电路与系统03 人工智能04 电磁兼容理论与应用05 射频微波电路与系统06 虚拟仪器与自动测控系统080903 微电子学与固体电子学002 电子信息工程学院15研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 集成电路的计算机辅助设计与测试方法学02 ULSI新器件及集成技术03 集成电路与系统的设计与仿真04 超大规模集成电路设计及制造技术080904 电磁场与微波技术002 电子信息工程学院25研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 射频、微波与毫米波技术02 天线理论和工程03 微波毫米波EDA及计算电磁学04 散射辐射测量与射频仿真05 微波毫米波成像理论与技术06 微波遥感理论与技术0810 信息与通信工程081001 通信与信息系统002 电子信息工程学院65或203日语③301数学一④421通信类专业综合或424信息类专业综合01 信息传输与处理02 现代数字通信系统与遥控遥测技术03 通信与网络技术04 卫星导航、信息融合与综合电子系统05 先进的扩频通信系统06 信息工程与探测技术081002 信号与信息处理002 电子信息工程学院35研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 高分辨率图像处理与分析02 智能信息处理03 无线通信网络与信号处理04 先进电子系统建模、仿真与体系结构05 信息系统和信息获取与处理06 信息系统与软件技术● 081021 信息网络002 电子信息工程学院10研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 现代信息网络技术02 信息综合与宽带网络03 多媒体传输与应用04 无线通信网络中的信号处理● 081022 集成电路设计002 电子信息工程学院10研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 数模混合集成电路(SOC)设计、建模与应用02 大规模数字集成电路设计0811 控制科学与工程081101 控制理论与控制工程003 自动化科学与电气工程23学院研究方向:①101政治②201英语③301数学一④432控制理论综合或436电子技术综合01 现代控制理论及应用02 智能控制03 故障检测与容错控制04 智能交通系统与信息控制05 机器人控制与导航009 理学院10研究方向:①101政治②201英语或202俄语或203日语③301数学一④431自动控制原理01 非线性控制系统理论及应用02 智能控制理论及应用03 鲁棒控制理论及应用04 机器人控制05 计算机控制系统与仿真06 智能结构的主动振动控制081102 检测技术与自动化装置003 自动化科学与电气工程41学院研究方向:①101政治②201英语③301数学一④433控制工程综合或436电子技术综合01 工业过程检测与控制技术02 自动测试系统及虚拟仪器03 机电系统智能测试与故障诊断04 微机系统的开发与应用05 测控网络技术06 智能仪器与智能测控技术081103 系统工程008 经济管理学院10研究方向:①101政治②201英语③301数学一④481管理科学基础或482企业管理基础01 系统工程理论及方法02 系统仿真及其应用03 复杂系统数据分析04 物流系统工程081104 模式识别与智能系统003 自动化科学与电气工程13学院研究方向:①101政治②201英语③301数学一④432控制理论综合或436电子技术综合01 智能化模式识别及其应用02 生物特征信息处理与识别03 复杂系统的智能优化控制与决策04 网络环境下的智能自动化05 高速实时图象处理与目标检测和识别015 宇航学院20研究方向:①101政治②201英语或202俄语或203日语③301数学一④424信息类专业综合或431自动控制原理或461计算机专业技术基础01 图像处理理论与应用02 模式识别理论与应用03 三维成像重建与多目视觉技术04 图像压缩与传输技术05 图像制导与视频图像处理技术081105 导航、制导与控制003 自动化科学与电气工程71学院研究方向:①101政治②201英语或202俄语③301数学一④433控制工程综合01 先进飞行控制、导航与制导02 计算机控制与仿真技术03 智能控制与决策04 虚拟技术及应用05 计算机系统可靠性与信息安全06 空中交通管制015 宇航学院20研究方向:①101政治②201英语③301数学一④431自动控制原理01 空间飞行器导航、制导与控制02 航天器自主定位技术研究03 空间飞行器测控技术04 弹道飞行器导航制导与控制技术05 航天用多传感器信息融合技术0812 计算机科学与技术081201 计算机系统结构006 计算机学院50研究方向:①101政治②201英语③301数学一④461计算机专业技术基础01 新一代互联网体系结构02 高性能计算机体系结构03 并行与分布式计算技术04 嵌入式计算技术与应用05 容错计算技术081202 计算机软件与理论006 计算机学院85研究方向:①101政治②201英语③301数学一④461计算机专业技术基础01 计算机科学理论与基础02 高速网络下的协同工作环境03 软件质量工程04 工程工程与软件工程管理05 面向领域服务的软件支撑技术081203 计算机应用技术006 计算机学院85研究方向:①101政治②201英语③301数学一④461计算机专业技术基础01 虚拟现实与多媒体技术02 大规模计算机应用工程化03 计算机网络应用04 计算机网络安全05 电子政务与电子商务081280 软件工程硕士006 计算机学院70培养费四万元研究方向:①101政治②201英语③301数学一④461计算机专业技术基础01 软件工程021 软件学院120培养费四万元研究方向:01 集成电路设计①101政治②201英语③301数学一④891数据结构与C语言程序设计02 IT项目管理与产业信息化①101政治②201英语③301数学一④891数据结构与C语言程序设计03 日文应用软件开发①101政治②201英语或203日语③301数学一④891数据结构与C语言程序设计04 嵌入式软件①101政治②201英语③301数学一④891数据结构与C语言程序设计05 软件工程与管理①101政治②201英语③301数学一④891数据结构与C语言程序设计0814 土木工程081401 岩土工程018 土木工程系7研究方向:01 岩土本构理论及工程应用①101政治②201英语或203日语③301数学一④451材料力学或881结构力学02 环境岩土工程①101政治②201英语或203日语③301数学一④451材料力学或881结构力学03 岩土工程化学与地基处理①101政治②201英语③301数学一④411物理化学或451材料力学或881结构力学081402 结构工程018 土木工程系25研究方向:01 混凝土结构分析与设计①101政治②201英语③301数学一④451材料力学或881结构力学02 轻型钢结构与组合结构①101政治②201英语③301数学一④451材料力学或881结构力学03 工程结构健康检测与维护、加固①101政治②201英语③301数学一④451材料力学或881结构力学04 土木工程现代化施工管理①101政治②201英语或203日语③301数学一④451材料力学或881结构力学05 工程结构数值仿真分析①101政治②201英语③301数学一④451材料力学或881结构力学0817 化学工程与技术081704 应用化学001 材料科学与工程学院26研究方向:①101政治②201英语或202俄语或203日语③302数学二④412无机化学01 纳米材料化学02 能源材料与催化化学03 光电化学04 精细化工0823 交通运输工程082301 道路与铁道工程018 土木工程系8研究方向:01 土—结构共同工作①101政治②201英语或203日语③301数学一④451材料力学或881结构力学02 城市地下工程①101政治②201英语或203日语③301数学一④451材料力学或881结构力学03 建筑工程经济与项目管理①101政治②201英语或203日语③301数学一④451材料力学或881结构力学04 土木工程材料①101政治②201英语③301数学一④411物理化学或451材料力学或881结构力学082302 交通信息工程及控制002 电子信息工程学院22研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或422交通信息类专业综合或424信息类专业综合01 空天地一体化信息网络02 现代通信网络与智能交通信息技术03 现代空中交通管理082304 载运工具运用工程005 航空科学与工程学院10研究方向:①101政治②201英语或202俄语或203日语③301数学一④431自动控制原理或451材料力学或492理论力学01 飞机飞行性能、飞行品质与仿真02 空中交通与飞行安全03 飞行动力学与飞行自动化013 汽车工程系6研究方向:①101政治②201英语或202俄语或203日语③301数学一④492理论力学或831工程流体力学01 载运工具现代设计理论与方法02 汽车检测与故障诊断技术03 汽车市场调查与预测0824 船舶与海洋工程082403 水声工程004 能源与动力工程学院10研究方向:①101政治②201英语或202俄语或203日语③301数学一④441流体力学或442工程热力学或443声学基础01 水声目标声反射及声隐身技术研究02 水下推进器的降噪及主被动噪声控制研究0825 航空宇航科学与技术082501 飞行器设计005 航空科学与工程学院45研究方向:①101政治②201英语或202俄语或203日语③301数学一④431自动控制原理或451材料力学或492理论力学01 飞行器总体设计(含轻型飞机和微小型飞行器)02 直升机设计03 飞行器结构设计及CAD04 气动弹性数字化设计与主动控制05 先进飞行器动力学与控制06 人机系统与飞行品质015 宇航学院60研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或431自动控制原理或451材料力学或492理论力学01 新型航天器概念研究02 飞行器先进设计方法研究03 飞行动力学、制导、导航与控制04 飞行器结构与机构动力学、控制与优化082502 航空宇航推进理论与工程004 能源与动力工程学院60研究方向:①101政治②201英语或202俄语或203日语③301数学一④431自动控制原理或436电子技术综合或441流体力学或442工程热力学或443声学基础或451材料力学01 总体优化及计算机辅助设计02 内流场及气动力学、气动声学03 燃烧与燃烧室04 传热与传质05 强度、振动、可靠性与维修性06 发动机控制、测试、状态监视与故障诊断015 宇航学院35研究方向:①101政治②201英语或202俄语或203日语③301数学一④441流体力学或442工程热力学01 火箭发动机工作过程数值仿真02 火箭发动机设计、优化与结构完整性03 火箭发动机新技术和新概念04 冲压发动机技术05 特种推进技术082503 航空宇航制造工程007 机械工程及自动化学院50研究方向:01 计算机辅助设计与制造①101政治②201英语③301数学一④451材料力学或461计算机专业技术基础或471机械工程专业基础或493高等代数02 现代产品数据管理系统与应用①101政治②201英语③301数学一④451材料力学或461计算机专业技术基础或471机械工程专业基础03 飞行器数字化制造技术①101政治②201英语③301数学一④451材料力学或461计算机专业技术基础或471机械工程专业基础04 板料塑性成形理论与工艺①101政治②201英语③301数学一④451材料力学或471机械工程专业基础05 计算机辅助成形仿真及控制①101政治②201英语③301数学一④451材料力学或471机械工程专业基础06 飞行器板金成形技术①101政治②201英语③301数学一④451材料力学或471机械工程专业基础082504 人机与环境工程005 航空科学与工程学院10研究方向:①101政治②201英语③301数学一④452热工基础01 安全工程02 环境控制及环境人机工程● 082521 航空宇航系统工程014 工程系统工程系50研究方向:①101政治②201英语③301数学一④431自动控制原理或451材料力学或841概率与数理统计01 可靠性工程与系统工程02 软件可靠性工程03 可靠性与环境试验技术0826 兵器科学与技术082601 武器系统与运用工程014 工程系统工程系25研究方向:①101政治②201英语③301数学一④431自动控制原理或451材料力学或841概率与数理统计01 维修性工程02 综合保障工程0830 环境科学与工程083002 环境工程001 材料科学与工程学院26研究方向:①101政治②201英语或202俄语或203日语③302数学二④411物理化学01 水污染控制工程02 大气污染控制工程03 环境生物技术04 生态环境材料0831 生物医学工程083100 生物医学工程002 电子信息工程学院5研究方向:①101政治②201英语或202俄语或203日语③301数学一④421通信类专业综合或424信息类专业综合01 生物医学信息检测、处理与传输02 情感信息处理03 生物医学传感器及生物芯片技术005 航空科学与工程学院5研究方向:①101政治②201英语③301数学一④451材料力学或492理论力学01 生物固体力学010 生物工程系30研究方向:①101政治②201英语③302数学二或306西医综合④411物理化学或421通信类专业综合或423光电类专业综合或424信息类专业综合或441流体力学或451材料力学或471机械工程专业基础或492理论力学或801生物医学工程基础01 航空航天生物医学工程02 人体行为工程(康复工程及人体功效学)03 生物医学信息及生物仪器04 生物力学1201 管理科学与工程120100 管理科学与工程008 经济管理学院60研究方向:①101政治②201英语③301数学一④481管理科学基础或482企业管理基础01 项目管理与工业工程02 生产与服务系统优化与仿真03 决策与决策支持系统04 电子商务05 信息系统与信息管理06 交通运输规划与管理● 120121 金融工程008 经济管理学院10研究方向:①101政治②201英语③301数学一④481管理科学基础或483经济学01 金融风险管理02 金融衍生工具定价与开发设计1202 工商管理120202 企业管理008 经济管理学院30研究方向:①101政治②201英语③302数学二④481管理科学基础或482企业管理基础01 企业管理理论方法及应用02 生产运作与质量管理03 财务会计管理04 战略与营销管理05 人力资源管理120204 技术经济及管理008 经济管理学院10研究方向:①101政治②201英语③302数学二④481管理科学基础或482企业管理基础01 循环经济02 技术创新(项目)管理03 技术经济比较与评估120280 工商管理硕士008 经济管理学院200研究方向:①199MBA联考综合能力②299MBA联考英语00 不区分研究方向1204 公共管理120401 行政管理011 人文社会科学学院31研究方向:①101政治②201英语或203日语③304数学四或712行政管理基础④812公共政策分析01 行政管理理论与实践02 公共政策分析120403 教育经济与管理011 人文社会科学学院8研究方向:①101政治②201英语③304数学四④431自动控制原理或451材料力学或461计算机专业技术基础或483经济学或811教育学01 教育系统分析与设计02 高等评估与质量保障03 高等教育发展战略0101 哲学010108 科学技术哲学011 人文社会科学学院12研究方向:①101政治②201英语③304数学四④813马克思主义哲学01 高技术与经济.社会发展02 航空航天与发展战略03 科学思想与科学方法0202 应用经济学020201 国民经济学011 人文社会科学学院12研究方向:①101政治②201英语③304数学四④814经济学综合01 技术进步与经济增长02 公共政策与经济发展020204 金融学。
971 机械工程专业综合考试大纲(2013 版)、考试组成971 机械工程专业综合试卷共分四部分:1)理论力学(动力学);2)机械原理;3)机械设计;4)自动控制原理,各部分满分均为50 分。
1)、2)部分为必答部分,3)、4)部分为选答部分,考生二选一作答。
、理论力学(动力学)部分的考试大纲一)参考教材1.《动力学》(第2版)1-7 章谢传锋主编,高等教育出版社二)主要内容及基本要求1.质点动力学⑴ 质点运动学(在直角坐标系和自然轴系下描述、点的复合运动)⑵ 质点动力学方程(在惯性系和非惯性系中表示)、⑶ 点的复合运动初步掌握上述内容的概念、分析的基本方法和思路。
2.质点系动力学⑴ 动量定理⑵ 变质量质点动力学基本方程⑶ 对定点和动点的动量矩定理⑷ 动能定理掌握上述内容的定理、基本方程,特别是各种问题的分析方法。
3.刚体动力学I 、动静法⑴ 刚体平面运动的运动学和动力学⑵ 达朗贝尔原理(惯性力的简化、动静法、动平衡与静平衡)4.刚体动力学II 、拉格朗日方程⑴ 拉格朗日方程⑵ 动力学普遍方程⑶ 动力学II (刚体的定点运动与一般运动的运动学与动力学)5.振动基础⑴ 单自由度系统的振动在掌握必要的基础知识外,重点是能够有建立力学、数学模型及提出问题和分析解决问题的能力,掌握定性分析和定量分析的方法。
三、机械原理部分的考试大纲(一)参考教材1.《机械原理》,郭卫东,科学出版社,2010 2. 《机械原理教学辅导与习题解答》,郭卫东,科学出版社,2010(二)考试内容及基本要求本考试内容的章节是依据参考教材[1] 编制的,参考教材[2] 作为[1] 的辅助教材,给出了基本要求、重点与难点内容、典型例题和、常见错误和习题解答,对相关内容的掌握有帮助作用。
考试内容只涵盖书中的第1-5,9 章内容,其它章节可以不学习。
第1 章机构的组成原理1.1机构的组成及机构运动简图1.2平面机构的自由度了解机构的组成要素,掌握机构运动简图的绘制方法。
理论力学AII 期末考试模拟试题一、 选择题(将正确答案的字母填在空格内,每小题2分,共10分)1、对于具有定常约束的质点系,其动能T 最一般的形式可以表示成 的函数。
A :广义速度; B :广义坐标; C: 时间t2、定点运动的圆锥ABC 在水平固定圆盘上纯滚动,如图1所示。
若圆锥底面圆心D 作匀速圆周运动,则该圆锥的角加速度矢量α与角速度矢量ω的关系是 。
A :α平行于ω;B :α垂直于ω;C :为零矢量α;D :为非零矢量α图13、二自由度线性系统的振动周期与 有关。
A :广义质量;B :广义刚度;C :初始位置;D :初始速度4、只应用第二类拉格朗日方程 求出非自由质点系的约束力。
A :一定能; B :一定不能; C :不一定能5、第二类拉格朗日方程可用于研究具有 质点系的力学问题。
A :完整约束; B :定常约束; C :非完整约束; D :非定常约束 注:第二类拉格朗日方程为:),,2,1(d d k j Q q T q T t j j j " ==⎟⎟⎠⎞⎜⎜⎝⎛∂∂−⎟⎟⎠⎞⎜⎜⎝⎛∂∂。
其中k 为系统的自由度。
为对应于广义坐标的主动力的广义力。
j Q j q 二、 填空题(将最简结果填在空格内,每空5分,共50分)1、 质量为m 的质点M 可在半径为R 的圆环内运动,圆环以角速度ω(常矢量)绕AB 轴作定轴转动,如图2所示。
θ为质点的广义坐标,此时质点的动能可以表示成,其中012T T T T ++=)2,1,0(=i Ti g为广义速度的i 次齐次函数。
求:=2T =1T=0T图2 图32、长为L 质量为m 的均质杆OA 用光滑柱铰链悬挂在天花板上,下端与刚度系数为k 的水平弹簧连接,杆铅垂时弹簧为原长,如图3所示。
求系统在平衡位置附近作微幅摆动的动力学方程。
动力学方程: 。
3、圆盘相对正方形框架ABCD 以匀角速度02ω绕BC 轴转动,正方形框架以匀角速度0ω绕AB 轴转动,如图4所示。
航天飞行器动力学原理A 卷一、轨道力学的定义是什么,简述主要的研究内容。
二、什么是轨道要素,典型的轨道要素如何描述航天器的轨道特性,给出典型轨道的定义,并用图示方法具体说明。
三、简述太阳同步轨道,地球同步轨道,地球静止轨道,临界轨道以及回归轨道的定义,说明上述各种对应轨道要素应满足的数学条件。
四、根据322RR dt R d μ-=,说明L E H ,,三个积分常量及其具体含义(物理意义)。
五、什么是霍曼转移轨道,试求平面内霍曼轨道转移所需的两次轨道增量和变轨作用时间(包括轨道转移和轨道交会的时间条件)。
六、弹道导弹弹道一般由哪几段组成,各段有什么特点?七、弹道导弹自由飞行段的最大射程弹道是惟一的,,已知关机点速度0q ,试根据开普勒方程给出自由飞行段最大射程角ϕ,最大射程对应的关机点当地弹道倾角0ε的表达式(利用半通径0,εq 的关系)。
八、忽略地球转动并假设地球为圆球形,设导弹以常值当地弹道倾角再入,已知再入点高度e h 和当地弹道倾角e ε,再入段射程如何计算?九、分析垂直上升段飞行时间计算公式()1//40001-=G P t 的物理意义。
十、什么是比力,加速度计感受到的是什么量,导引惯性加速度和比力的关系?航天飞行器动力学原理B 卷(补考)一、轨道力学定义,内容二、瞬时轨道要素,平均轨道要素,开普勒轨道要素的定义,区别三、太阳同步轨道定义,数学条件,特点 四、根据322RR dt R d μ-=,说明L E H ,,三个积分常量及其具体含义(物理意义) 五、轨道平面转移相关(一次脉冲和三次脉冲的分界点)六、主动段氛围哪几段,要求是是什么。
七、已知关机点的r,v ,从发射坐标系转换到当地铅锤坐标系。
八、求q,e,a 和000,,εv r 的关系利用()θcos 1/e p r +=说出为什么会有高低轨道 (20分)九、推导再入段方程组力垂直于速度方向的方程(原题给出了方程,我懒得写了)。