江南快速自动扶梯电气原理.
- 格式:ppt
- 大小:2.24 MB
- 文档页数:35


⾃动扶梯控制电路⼯作原理图解⾃动扶梯,⼜称⾃动梯、⾃动电梯或⾃动滚梯。
它的外形与⼀般楼梯相仿,有⼀定倾⾓,⾃动运送⼈员上下,安装在不同标⾼的公共场所,如车站、商场等。
它由梯级、曳引链、驱动装置、梯路导轨、⾦属⾻架、梳齿前沿板、扶⼿装置、润滑系统等组成。
它以单速低噪声⼤起动转矩的三相异步电动机作为动⼒,通过减速机械驱动主轴轮,带动曳引链转动。
曳引链带动梯级运动,使梯级主轮沿着梯路导轨转动,这样就使梯级进⾏上升或下降运⾏。
⾃动扶梯按控制元器件的不同,可分为继电接触器控制式、电⼦式和微机式等⼏类,下⾯以继电接触器控制式⾃动扶梯为例进⾏分析。
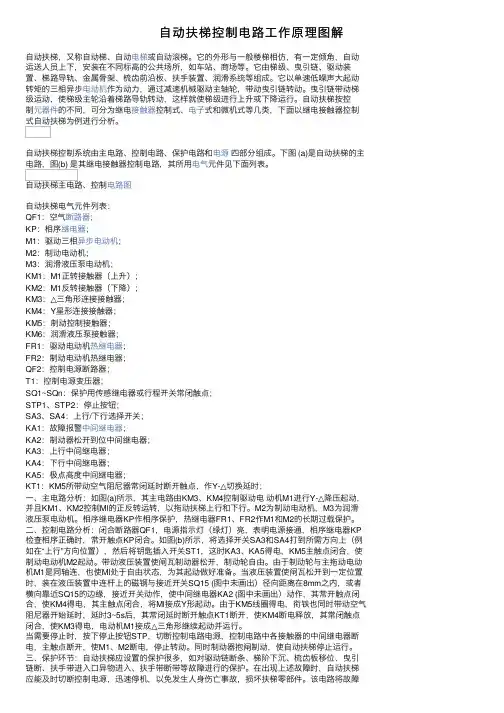
⾃动扶梯控制系统由主电路、控制电路、保护电路和电源四部分组成。
下图 (a)是⾃动扶梯的主电路,图(b) 是其继电接触器控制电路,其所⽤电⽓元件见下⾯列表。
⾃动扶梯主电路、控制电路图⾃动扶梯电⽓元件列表:QF1:空⽓断路器;KP:相序继电器;M1:驱动三相异步电动机;M2:制动电动机;M3:润滑液压泵电动机;KM1:M1正转接触器(上升);KM2:M1反转接触器(下降);KM3:△三⾓形连接接触器;KM4:Y星形连接接触器;KM5:制动控制接触器;KM6:润滑液压泵接触器;FR1:驱动电动机热继电器;FR2:制动电动机热继电器;QF2:控制电源断路器;T1:控制电源变压器;SQ1~SQn:保护⽤传感继电器或⾏程开关常闭触点;STP1、STP2:停⽌按钮;SA3、SA4:上⾏/下⾏选择开关;KA1:故障报警中间继电器;KA2:制动器松开到位中间继电器;KA3:上⾏中间继电器;KA4:下⾏中间继电器;KA5:极点⾼度中间继电器;KT1:KM5所带动空⽓阻尼器常闭延时断开触点,作Y-△切换延时;⼀、主电路分析:如图(a)所⽰,其主电路由KM3、KM4控制驱动电动机M1进⾏Y-△降压起动,并且KM1、KM2控制Ml的正反转运转,以拖动扶梯上⾏和下⾏。
M2为制动电动机,M3为润滑液压泵电动机。
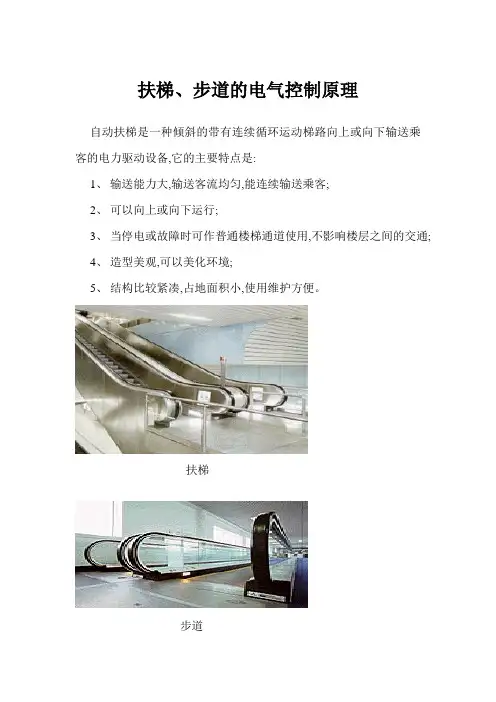
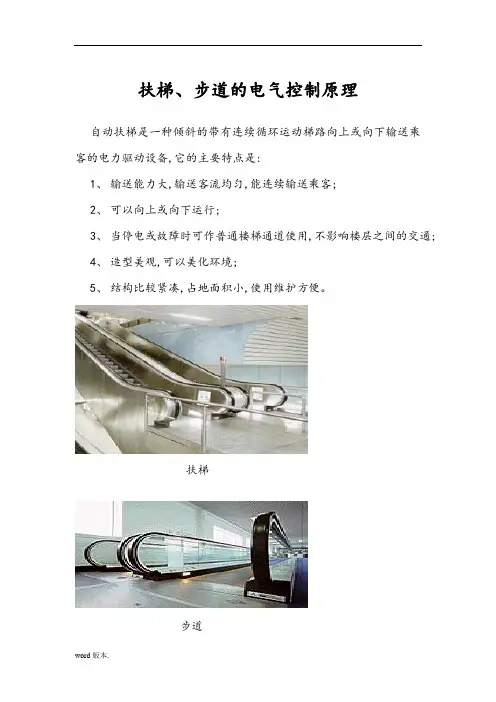
扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组中通入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
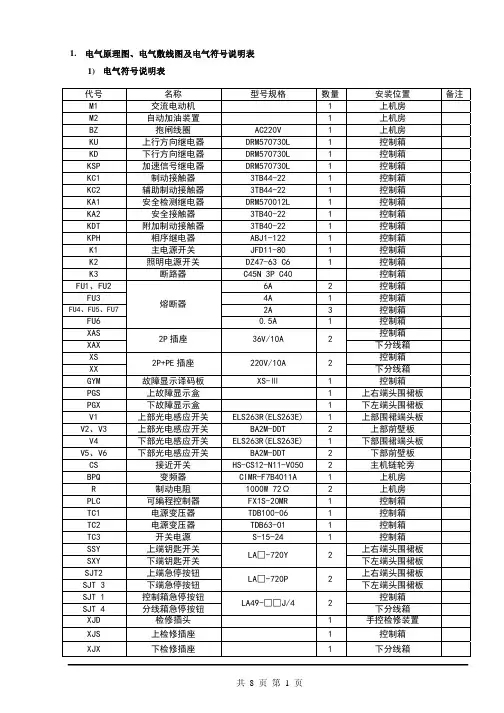
1.电气原理图、电气敷线图及电气符号说明表1)电气符号说明表代号 名称 型号规格 数量安装位置 备注M1 交流电动机 1 上机房M2 自动加油装置 1 上机房BZ 抱闸线圈 AC220V 1 上机房KU 上行方向继电器 DRM570730L 1 控制箱KD 下行方向继电器 DRM570730L 1 控制箱KSP 加速信号继电器 DRM570730L 1 控制箱KC1 制动接触器 3TB44-22 1 控制箱KC2 辅助制动接触器 3TB44-22 1 控制箱KA1 安全检测继电器 DRM570012L 1 控制箱KA2 安全接触器 3TB40-22 1 控制箱KDT 附加制动接触器 3TB40-22 1 控制箱KPH 相序继电器 ABJ1-122 1 控制箱K1 主电源开关 JFD11-80 1 控制箱K2 照明电源开关 DZ47-63 C6 1 控制箱K3 断路器 C45N 3P C40 控制箱FU1、FU2熔断器 6A 2 控制箱FU3 4A 1 控制箱 FU4、FU5、FU7 2A 3 控制箱 FU6 0.5A 1 控制箱XAS2P插座 36V/10A 2 控制箱XAX 下分线箱XS2P+PE插座 220V/10A 2 控制箱XX 下分线箱 GYM 故障显示译码板 XS-Ⅲ 1 控制箱 PGS 上故障显示盒 1 上右端头围裙板 PGX 下故障显示盒 1 下左端头围裙板 V1 上部光电感应开关 ELS263R(ELS263E) 1 上部围裙端头板 V2、V3 上部光电感应开关 BA2M-DDT 2 上部前壁板 V4 下部光电感应开关 ELS263R(ELS263E) 1 下部围裙端头板 V5、V6 下部光电感应开关 BA2M-DDT 2 下部前壁板 CS 接近开关 HS-CS12-N11-V050 2 主机链轮旁 BPQ 变频器 CIMR-F7B4011A 1 上机房 R 制动电阻 1000W 72Ω 2 上机房 PLC 可编程控制器 FX1S-20MR 1 控制箱TC1 电源变压器 TDB100-06 1 控制箱TC2 电源变压器 TDB63-01 1 控制箱TC3 开关电源 S-15-24 1 控制箱SSY 上端钥匙开关LA□-720Y 2 上右端头围裙板SXY 下端钥匙开关 下左端头围裙板SJT2 上端急停按钮LA□-720P 2 上右端头围裙板SJT 3 下端急停按钮 下左端头围裙板SJT 1 控制箱急停按钮LA49-□□J/4 2 控制箱SJT 4 分线箱急停按钮 下分线箱 XJD 检修插头 1 手控检修装置 XJS 上检修插座 1 控制箱 XJX 下检修插座 1 下分线箱SJS 检修上行按钮 1 手控检修装置 SJX 检修下行按钮 1 手控检修装置 SJT 停止按钮 LA49-□□J/4 1 手控检修装置SZS 上正常-检修转换开关LA49-□□X/2 2控制箱SZX 下正常-检修转换开关下分线箱EAS 上梯级照明 AC220V20W绿色 2 上端金属架内 EAX 下梯级照明 下端金属架内 DL 电铃 UC□475 1 金属骨架内STS 上梯级蹋陷开关UKT 2 中上部STX 下梯级蹋陷开关 中下部SZL 左梯级链断链开关UKS 6 涨紧装置SYL 右梯级链断链开关 涨紧装置SS1 上左梳齿异常开关 上梳齿前沿板左下 SS2 上右梳齿异常开关 上梳齿前沿板右下 SS3 下左梳齿异常开关 下梳齿前沿板左下 SS4 下右梳齿异常开关 下梳齿前沿板右下SC1 上左出入口开关LXW403D 4 上左出入口围裙板内SC2 上右出入口开关 上右出入口围裙板内 SC3 下左出入口开关 下左出入口围裙板内 SC4 下右出入口开关 下右出入口围裙板内SW1 上左围裙板开关LXW403D 4 上左围裙板内侧SW2 上右围裙板开关 上右围裙板内侧 SW3 下左围裙板开关 下左围裙板内侧 SW4 下右围裙板开关 下右围裙板内侧SF1 左扶手带断带开关LXK3-20S/J 2 涨紧装置SF2 右扶手带断带开关 涨紧装置 SCL 驱动链断链开关 LXK3-20S/J 1 驱动链旁 SDT 附加制动器检测开关 TR236 1 主驱动旁 DT 电磁铁线圈 5N 380VAC 1 主驱动旁 EU 上部方向指示器 TGF-100 1 上部外盖板端头 ED 下部方向指示器 TGF-100 1 下部外盖板端头2)电气原理图3)电气接线图。
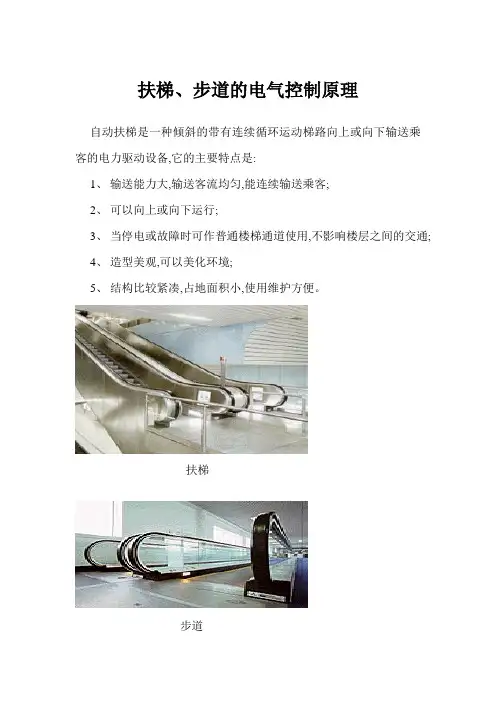
扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差异不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回忆:三相交流异步电动机的工作原理:在定子绕组中通入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行〔正反转〕的实现:下的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
2、电动机的启动。
知识回忆:三相交流异步电动机的降压启动有四种:定子回路串电阻、自耦变压器降压启动、星---三角形降压启动、延边三角型降压启动。
自动扶梯的结构原理
自动扶梯,作为现代城市中常见的交通工具,其结构原理是怎样的呢?下面我们就来详细了解一下。
首先,自动扶梯的结构主要由步道、扶手、驱动装置和支撑结构组成。
步道通常由金属或者玻璃制成,扶手则位于步道两侧,用于乘客扶持和保持平衡。
驱动装置则是自动扶梯的“心脏”,通常由电动机、链条和轮子组成,通过电动机的驱动使链条转动,从而带动轮子旋转,实现自动扶梯的运行。
支撑结构则是整个自动扶梯的支撑框架,起到支撑和固定作用。
其次,自动扶梯的结构原理是基于轮子和链条的传动原理。
当电动机启动时,链条开始转动,轮子也随之旋转,从而带动步道上的梯级运行。
同时,扶手也随着步道的运行而不断地向上或向下移动,为乘客提供便利的扶持。
整个过程中,驱动装置起到了至关重要的作用,保证了自动扶梯的正常运行。
另外,自动扶梯的结构原理还涉及到安全装置的设计。
为了保障乘客的安全,自动扶梯通常配备有多种安全装置,如紧急停止按钮、防夹手装置、超载保护装置等。
这些安全装置能够在紧急情况下及时停止自动扶梯的运行,避免事故的发生,保障乘客的安全。
最后,自动扶梯的结构原理也需要考虑到维护保养的问题。
定期的维护保养对于自动扶梯的正常运行至关重要,只有保持良好的状态,才能确保自动扶梯的安全性和可靠性。
总的来说,自动扶梯的结构原理是基于轮子和链条的传动原理,通过驱动装置的作用实现步道和扶手的运行,同时配备有多种安全装置,保障乘客的安全,而定期的维护保养也是确保自动扶梯正常运行的重要环节。
希望通过本文的介绍,能够让大家对自动扶梯的结构原理有一个更加深入的了解。

自动扶梯是一种用于人员运输的垂直交通设备,通常用于连接楼层之间。
它通过循环运行的链条或带轮来传递运动力,使乘客能够轻松地上下移动。
以下是自动扶梯的基本原理:
扶梯结构:自动扶梯由一个倾斜的连续金属梯级链条或带轮组成,梯级上覆盖着橡胶或金属踏板。
通常有两个平行运行的链条或带轮,一个用于上行,一个用于下行。
驱动系统:自动扶梯的驱动系统位于扶梯的底部或顶部。
它通常由电动机、减速机和链条或带轮传动组成。
电动机通过减速机驱动链条或带轮的旋转,从而带动整个扶梯运行。
扶手和栏杆:自动扶梯的两侧通常配备有扶手和栏杆,以提供乘客额外的支持和安全保护。
安全系统:自动扶梯还配备了多种安全系统,以确保乘客的安全。
这些系统包括速度监控、防滑装置、紧急停机按钮、防夹手装置等。
当自动扶梯启动时,电动机开始运转,通过传动系统将动力传递给链条或带轮。
链条或带轮的旋转使扶梯的梯级连续运动,上升或下降。
乘客站在梯级上,随着扶梯的运行,他们可以轻松地上下移动。
同时,乘客可以抓住扶手或栏杆以保持平衡和稳定。
自动扶梯的设计和运行是为了提供高效、安全和便捷的垂直交通。
在使用自动扶梯时,乘客应注意站稳,并遵守安全指示和警示。
自动扶梯的传动原理是什么
自动扶梯的传动原理主要包含以下几点:
1. 动力来源
自动扶梯通常由电动机提供动力。
电动机带动主传动轴和链条或齿轮的转动。
2. 速度调节
通过变频调速系统,调节电动机转速,实现扶梯运行速度的平稳调节。
3. 传力系统
主传动轴将动力通过链条或齿轮传递给从动轴,带动扶梯台阶移动。
4.台阶运动
台阶通过轮系与链条或皮带相连,依靠主动链条的运动实现台阶的循环运转。
5.平稳运转
扶手与台阶上的皮带通过齿槽配合,使扶手和台阶保持同步运转,确保平稳。
6.电子控制
PLC或计算机控制系统,精确控制扶梯电机运转参数,实现自动运行。
7.安全保护
设置应急停止开关、过速保护器等安全保护装置,确保运行安全。
自动扶梯作为重要的交通运输设备,其可靠性和安全性至关重要。