机器人导论
- 格式:doc
- 大小:216.50 KB
- 文档页数:9
2机器人学导论的100个论题1. 机器人学的定义和范畴2. 机器人的发展历程3. 机器人的应用领域4. 机器人的分类和特点5. 机器人的工作原理和组成部件6. 机械结构与运动学7. 机器人的传感器和感知系统8. 机器人的控制系统9. 机器人的决策与规划10. 机器人的学习与智能化11. 机器人的运动规划与路径规划12. 机器人图像处理与视觉导航13. 机器人的自主导航与定位14. 机器人的力学与动力学建模15. 机器人的运动控制与力控制16. 机器人和人类的协作与共存17. 机器人和社会的互动与影响18. 机器人的道德与伦理问题19. 机器人在工业生产中的应用20. 机器人在医疗领域的应用21. 机器人在农业领域的应用22. 机器人在交通运输中的应用23. 机器人在环境监测与保护中的应用24. 机器人在教育与娱乐中的应用25. 机器人在日常生活中的应用26. 机器人与人类的情感交流27. 机器人的机器学习与模式识别28. 机器人的语音识别与自然语言处理29. 机器人的计算机视觉与物体识别30. 机器人的路径规划与轨迹跟踪31. 机器人的机器人操作系统32. 机器人的机器人建模与仿真33. 机器人的机器人编程与控制34. 机器人的可重构与自组织能力35. 机器人的运动学参数标定与标定精度36. 机器人的感知误差与补偿方法37. 机器人的决策与规划的求解算法38. 机器人的运动控制与力控制算法39. 机器人的自主导航与定位算法40. 机器人的机器学习与智能化算法41. 机器人的运动规划与路径规划算法42. 机器人的图像处理与视觉导航算法43. 机器人的语音识别与自然语言处理算法44. 机器人的计算机视觉与物体识别算法45. 机器人的路径规划与轨迹跟踪算法46. 机器人的机器人操作系统算法47. 机器人的机器人建模与仿真算法48. 机器人的机器人编程与控制算法49. 机器人的可重构与自组织算法50. 机器人的控制算法的稳定性分析51. 机器人的误差鲁棒性分析与控制52. 机器人的能源管理与优化53. 机器人的可靠性与安全性设计54. 机器人的维护与故障诊断55. 机器人的人机界面与交互设计56. 机器人的社会接纳与公众认知57. 机器人的技术标准与法律法规58. 机器人的知识产权与专利策略59. 机器人的市场前景与商业化应用61. 机器人的人力资源与任务分配62. 机器人的团队协作与任务分工63. 机器人的项目管理与供应链64. 机器人的投资与融资策略65. 机器人的产业政策与发展战略66. 机器人的智能化与自动化67. 机器人的创新与技术竞争力68. 机器人的可持续发展与环境保护69. 机器人的文化与社会影响70. 机器人的国际合作与交流71. 机器人的生态系统与生态效应72. 机器人的区域发展与战略布局73. 机器人的国际标准与技术创新74. 机器人的个人隐私与信息安全75. 机器人的社会接受度与人机关系76. 机器人的自主性与责任问题77. 机器人的养老与健康服务78. 机器人的智能化与智慧城市79. 机器人的网络与云计算80. 机器人的数据存储与处理81. 机器人的机器人协同与协作82. 机器人的人工智能与深度学习83. 机器人的虚拟现实与增强现实84. 机器人的人体工程学与人机界面85. 机器人的机器人道德与伦理86. 机器人的机器人法律与政策87. 机器人的机器人经济学与商业模式88. 机器人的机器人教育与技术培训89. 机器人的机器人创业与创新90. 机器人的机器人科技与科研92. 机器人的机器人运营与维护93. 机器人的机器人安全与风险评估94. 机器人的机器人测试与验证95. 机器人的机器人监管与质量控制96. 机器人的机器人认证与准入97. 机器人的机器人可靠性与故障排除98. 机器人的机器人标准与规范99. 机器人的机器人技术评估与评价100. 机器人的机器人未来发展趋势。


机器人导论课后学习13301084-钟奎(1)ARM的发展简史ARM最早于1990年由Acorn改组而来,之前Acorn时期开发出自己第一代32位、6MHz、3.0μm处理器,即ARM1,并用它做出一台 RISC指令集的计算机,也就是说当时还是在沿袭传统的方式,自己设计芯片出售芯片,早期使用Acorn 芯片产品的包括苹果的Newton pad等。
RISC 即精简指令集计算机,起初为达到降低售价把面积设计的小,功耗低是顺带的优势,而价格低廉功耗少天然适合移动设备,1990年11月,从苹果获得150万英镑投资,从VLSI获25万英镑投资,Acorn则是12个工程师和作价150万英镑的IP,外加一个办公的谷仓,重组后的Acorn开启世界标准之旅。
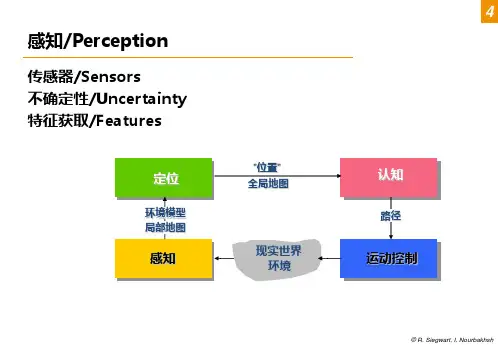
初创时期的ARM没有商业经验没有管理经验,当然也没有世界标准这种愿景,运营资金紧张,工程师人心惶惶,最后ARM决定自己不生产芯片,转而以授权的方式将芯片设计方案转让给其他公司,即“Partnership”开放模式,公司在1993年实现盈利,1998年纳斯达克和伦敦证券交易所两地上市,同年基于ARM 架构芯片出货达5000万片。
进入2000年,开始受益于手机以及其他电子产品的迅速普及,ARM系列芯片呈爆炸性增长,2001年11月出货量累积突破十亿片,2011年基于ARM系列芯片单年出货79亿片,年营收4.92亿英镑(合7.85亿美元),净利润1.13亿英镑。
ARM 的发展代表了半导体行业某种趋势,即从完全的垂直整合到深度的专业化分工,70年代半导体行业普遍采用上中下游的垂直整合封闭式生产体系,80年代开始半导体行业开始分化,出现垂直整合和分工化的系统制造、定制集成等两个体系,台积电的晶圆代工模式进一步推动了专业分工的发展,半导体行业分工进一步细化,形成IP、设计、晶圆、封装价上下游体系,ARM处于价值链顶端。
(2)STM32系列微控制器的特点STM32系列给MCU用户带来了前所未有的自由空间,提供了全新的32位产品选项,结合了高性能、实时、低功耗、低电压等特性,同时保持了高集成度和易于开发的优势。
STM32控制器的主要优点:使用ARM最新的、先进架构的Cortex-M3内核。
哈佛结构。
1.25 DMIPS/MHz和0.19 mW/MHz。
Thumb-2指令集以16位的代码密度带来了32位的性能。
单周期乘法指令和硬件除法指令。
内置了快速的中断控制器,提供了优越的实时特性,中断间的延迟时间降到只需6个CPU周期,从低功耗模式唤醒的时间也只需6个CPU周期。
与ARM7TDMI®相比运行速度最多可快35%且代码最多可节省45%。
关于Cortex-M3内核更多内容,请参阅第一章。
杰出的功耗控制。
高性能并非意味着高耗电。
STM32经过特殊处理,针对应用中三种主要的能耗需求进行了优化,这三种能耗需求分别是运行模式下高效率的动态耗电机制、待机状态时极低的电能消耗和电池供电时的低电压工作能力。
为此,STM32提供了三种低功耗模式和灵活的时钟控制机制,用户可以根据自己所需的耗电/性能要求进行合理的优化。
出众及创新的外设。
STM32的优势来源于两路高级外设总线(APB)结构,其中一个高速APB(可达CPU的运行频率),连接到该总线上的外设能以更高的速度运行。
最大程度的集成整合。
STM32内嵌电源监控器,减少对外部期间的需求,包括上电复位、低电压检测、掉电检测和自带时钟的看门狗定时器。
使用一个主晶振可以驱动整个系统。
低成本的4~16MHz晶振即可驱动CPU、USB以及所有外设,使用内嵌PLL产生多种频率,可以为内部实时时钟选择32KHz的晶振。
内嵌出厂前调校的8MHz RC振荡电路,可以作为主时钟源。
额外的针对RTC或看门狗的低频率RC电路。
LQPF 100封装芯片的最小系统只需要7个外部无源器件。
易于开发,可使产品快速进入市场。
使用STM32,你可以很轻松地完成产品的开发,ST提供了完整、高效的开发工具和库函数,帮助开发者缩短系统开发时间。
STM32固件库。
STM32固件库提供易用的函数可以使用户方便地访问STM32的各个标准外设,并使用它们的所有特性。
这个免费的软件包提供的驱动覆盖了从GPIO到定时器,再到CAN、I2C、SPI、UART和ADC等等的所有标准外设。
对应的C源代码只是用了最基本的C编程的知识,经过严格测试,并且配有完整的文档。
它兼容所有基于ARM内核的C编译器,并且和最新的MISRA C兼容。
STM32固件库沿用了STR7和STR9的API(应用程序接口),和他们相同。
USB开发工具集。
在更广的应用领域中,USB功能的实现将变得越来越方便,因为USB开发工具集提供了完整的,经过验证的固件包,使得用户可以顺利地开发各个类的USB固件,其中包括:用于普通的设备管理任务的控制传输。
中断传输,附带人机界面类(HID)鼠标/游戏杆例程。
批量传输,附带大规模存储(mass storage)例程。
同步传输,附带扬声器/麦克风例程。
这个工具集还包含了通过USB接口进行固件升级的DFU以及在USB接口上模拟RS232接口的虚拟串口例程(CDC类的实现)。
开发工具。
意法半导体以及众多第三方为32位STM32微控制器提供了从低成本到高端的全套开发工具,包括简单易用的入门套件,完整的开发工具方案,编程工具以及嵌入式操作系统,所有这些都是为基于ARM Cortex-M3内核的STM32专门定制的。
常用的第三方开发工具有Keil MDK和IAR EWARM,这两个工具的使用在后面的章节将会做详细介绍。
Internet支持。
从您可以从/stm32获取最新的STM32微控制器的新闻、资料下载以及文档信息。
要获取更多的专用的第三方工具的信息,请访问相关的第三方工具供应商的网页。
(3)课堂有关知识内容1.冯·诺依曼结构冯·诺依曼结构,又称为普林斯顿体系结构,是一种将程序指令存储器和数据存储器合并在一起的存储器结构。
取指令和取操作数都在同一总线上,通过分时复用的方式进行;缺点是在高速运行时,不能达到同时取指令和取操作数,从而形成了传输过程的瓶颈。
由于程序指令存储地址和数据存储地址指向同一个存储器的不同物理位置,因此程序指令和数据的宽度相同,如英特尔公司的8086中央处理器的程序指令和数据都是16位宽。
目前使用冯·诺依曼结构的CPU和微控制器有很多。
其中包括英特尔公司的8086及其他CPU,TI的MSP430处理器,ARM公司的ARM7,MIPS 公司的MIPS处理器。
2. 哈佛结构哈佛结构是一种将程序指令存储和数据存储分开的存储器结构,它的主要特点是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个独立的存储器,每个存储器独立编址、独立访问,目的是为了减轻程序运行时的访存瓶颈。
如图,哈佛结构的计算机由CPU、程序存储器和数据存储器组成,程序存储器和数据存储器采用不同的总线,从而提供了较大的存储器带宽,使数据的移动和交换更加方便,尤其提供了较高的数字信号处理性能。
目前使用哈佛结构的中央处理器和微控制器有很多,除了上面提到的Microchip公司的PIC系列芯片,还有摩托罗拉公司的MC68系列、Zilog公司的Z8系列、ATMEL公司的AVR系列和安谋公司的ARM9、ARM10和ARM11。
哈佛结构与普林斯顿结构处理器相比,处理器有两个明显的特点:使用两个独立的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;使用独立的两条总线,分别作为CPU与每个存储器之间的专用通信路径,而这两条总线之间毫无关联。
随着CPU设计的发展,流水线的增加,指令和数据的互斥读取影响CPU指令执行的scale程度。
哈佛结构中数据存储器与程序代码存储器分开,各自有自己的数据总线与地址总线,取操作数与取指令能同时进行。
但这是需要CPU提供大量的数据线,因而很少使用哈佛结构作为CPU外部构架来使用。
对于CPU内部,通过使用不同的数据和指令cache,可以有效的提高指令执行的效率,因而目前大部分计算机体系都是在CPU 内部的使用哈佛结构,在CPU外部使用冯·诺依曼结构。
3CISC 和RISC指令系统CISC是指复杂指令系统计算机(ComplexInstruction Set Computer);RISC是指精减指令系统计算机(Reduced Instruction Set Computer)。
CISC指令系统是一种大量指令很少使用的指令系统。
它不仅带来计算机结构上的复杂性,同时使微程序设计更为复杂,致使出错的概率增加。
此外,大量使用操作复杂的存储器——存储器操作指令,因而也很难大幅提高计算机的效率。
RISC结构的最大特点是指令系统简单。
其设计原则是使计算机的结构更加简单、更加合理,使系统达到最高的有效速度。
为此,首先简化硬件设计,排除那些实现复杂功能的复杂指令,而保留能提高机器性能并且使用频率最高的指令。
精减指令系统计算机开始出现于80年代中、后期。
这是计算机体系结构发展史又一次重大的变革,是计算机发展的必然趋势。
RISC技术的特点是:①采用高效的流水线操作:使指令在流水线中并行地操作,从而提高处理数据和指令的速度。
②指令格式的规格化和简单化:为与流水线结构相适应且提高流水线的效率,指令的格式必须趋于简单和固定的规式。
比如指令采用16位或32位的固定的长度,并且指令中的操作码字段、操作数字段都尽可能具有统一的格式。
此外,尽量减少寻址方式,从而使硬件逻辑部件简化且缩短译码时间,同时也提高了机器执行效率和可靠性。
③采用面向寄存器堆的指令:RISC结构采用大量的寄存器——寄存器操作指令,使指令系统更为精简,控制部件更为简化,指令执行速度大大提高。
由于VLSl技术的迅速发展,使得在一个芯片上做大量的寄存器成为可能,这也促成了RISC结构的实现。
④采用装入/存储指令结构:在ClSC结构中,大量设置存储器——存储器操作指令,频繁地访问内存。
将会使执行速度降低。
RISC结构的指令系统中,只有装入/存储指令可以访问内存,而其它指令均在寄存器之间对数据进行处理。
用装入指令从内存中将数据取出,送到寄存器;在寄存器之间对数据进行快速处理,并将它暂存在那里,以便再有需要时,不必再次访问内存。
在适当的时候,使用一条存储指令再将这个数据送回内存。
采用这种方法可以提高指令执行的速度。
CISC(复杂指令集计算机)和RISC(精简指令集计算机)是当前CPU的两种架构。
它们的区别在于不同的CPU设计理念和方法。
早期的CPU全部是CISC架构,它的设计目的是要用最少的机器语言指令来完成所需的计算任务。
RISC和CISC是设计制造微处理器的两种典型技术,虽然它们都是试图在体系结构、操作运行、软件硬件、编译时间和运行时间等诸多因素中做出某种平衡,以求达到高效的目的,但采用的方法不同,因此,在很多方面差异很大.RISC设计者把主要精力放在那些经常使用的指令上,尽量使它们具有简单高效的特色。