转子不平衡量测试
- 格式:ppt
- 大小:1.17 MB
- 文档页数:95
1、 目的为了使公司的员工能有一个安全的工作环境及规范的操作规程,特制定本操作规程。
2、 范围本规范适用于本厂Y 系列H80-225,以及无特殊要求的派生我电机的同规格转子校动平衡。
3、 职责3.1由操作员严格按此检验规范操作。
3.2品保部对其进行监督。
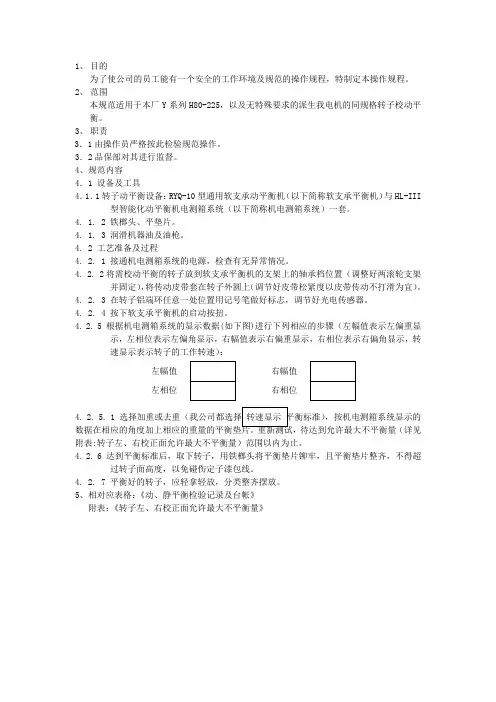
4、规范内容4.1 设备及工具4.1.1转子动平衡设备:RYQ-10型通用软支承动平衡机(以下简称软支承平衡机)与HL-III型智能化动平衡机电测箱系统(以下简称机电测箱系统)一套。
4. 1. 2 铁榔头、平垫片。
4. 1. 3 润滑机器油及油枪。
4. 2 工艺准备及过程4. 2. 1 接通机电测箱系统的电源,检查有无异常情况。
4. 2. 2将需校动平衡的转子放到软支承平衡机的支架上的轴承档位置(调整好两滚轮支架并固定),将传动皮带套在转子外圆上(调节好皮带松紧度以皮带传动不打滑为宜)。
4. 2. 3 在转子铝端环任意一处位置用记号笔做好标志,调节好光电传感器。
4. 2. 4 按下软支承平衡机的启动按扭。
4. 2. 5 根据机电测箱系统的显示数据(如下图)进行下列相应的步骤(左幅值表示左偏重显示,左相位表示左偏角显示,右幅值表示右偏重显示,右相位表示右偏角显示,转速显示表示转子的工作转速):4. 2.5. 1,按机电测箱系统显示的待达到允许最大不平衡量(详见附表:转子左、右校正面允许最大不平衡量)范围以内为止。
4. 2. 6 达到平衡标准后,取下转子,用铁榔头将平衡垫片铆牢,且平衡垫片整齐,不得超过转子面高度,以免碰伤定子漆包线。
4. 2. 7 平衡好的转子,应轻拿轻放,分类整齐摆放。
5、相对应表格:《动、静平衡检验记录及台帐》附表:《转子左、右校正面允许最大不平衡量》左幅值 左相位 右幅值 右相位。
ansys 转子动力学不平衡质量ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具。
不平衡质量是指在旋转机械系统中存在的质量分布不均匀的情况,它会导致系统产生不平衡力和振动。
不平衡质量在旋转机械系统中的影响是非常重要的,它会引起系统的振动、噪声和磨损,甚至会导致系统的故障和损坏。
因此,对不平衡质量进行准确的分析和评估是非常重要的。
ANSYS转子动力学可以通过以下步骤进行不平衡质量的分析:1. 建立转子模型:首先,需要根据实际情况建立旋转机械系统的几何模型。
这个模型可以包括转子、轴承、轴承座、连接件等各个组成部分。
2. 定义转子材料和属性:根据实际情况,需要定义转子的材料属性,例如弹性模量、密度等。
3. 定义转子的运动:需要定义转子的旋转速度和方向。
这个可以根据实际情况设置,例如转子的转速和转向。
4. 定义不平衡质量:需要定义转子上的不平衡质量分布。
这个可以根据实际情况设置,例如在转子上添加一定的质量块或者质量分布。
5. 进行转子动力学分析:使用ANSYS转子动力学工具进行分析。
工具会根据转子的几何模型、材料属性、运动和不平衡质量分布等信息,计算出转子的振动响应和不平衡力。
可以通过分析结果来评估不平衡质量对系统的影响。
6. 优化设计:根据分析结果,可以对转子的设计进行优化。
例如调整不平衡质量的位置和大小,以减小不平衡力和振动。
总之,ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具,通过建立转子模型、定义转子的运动和不平衡质量分布等信息,可以计算出转子的振动响应和不平衡力,并进行优化设计。
转子动平衡实验报告转子动平衡实验报告引言转子动平衡是一项重要的工程技术,它在机械工程、航空航天等领域中具有广泛的应用。
本实验旨在通过转子动平衡实验,探究转子的不平衡现象及其对机械设备的影响,并学习平衡方法和技术。
一、实验目的通过转子动平衡实验,达到以下目的:1. 了解转子的不平衡现象及其对机械设备的影响;2. 学习转子动平衡的基本原理和方法;3. 掌握转子动平衡实验的操作技巧。
二、实验装置与原理1. 实验装置:转子动平衡试验台、振动传感器、数据采集系统等。
2. 实验原理:转子动平衡实验是通过测量转子在不同转速下的振动信号,并根据振动信号的特征进行分析,确定转子的不平衡量,并采取相应的平衡措施,使转子达到平衡状态。
三、实验步骤1. 准备工作:检查实验装置是否正常工作,调整传感器位置,确保传感器能够准确测量振动信号。
2. 实验前的校准:对实验装置进行校准,确保测量结果的准确性。
3. 实验数据采集:将转子装置启动,逐渐调整转速,同时通过振动传感器采集转子在不同转速下的振动信号。
4. 数据分析与处理:将采集到的振动信号导入数据采集系统,进行数据分析与处理,确定转子的不平衡量。
5. 平衡措施:根据不平衡量的大小和位置,采取相应的平衡措施,如重量添加或去除等,使转子逐步达到平衡状态。
6. 实验结果验证:重新采集转子在不同转速下的振动信号,验证平衡效果,并进行进一步的调整和优化。
四、实验结果与讨论通过实验数据的分析与处理,得到转子的不平衡量,并采取相应的平衡措施后,再次采集振动信号进行验证。
根据实验结果,可以评估平衡效果,并讨论平衡措施的有效性和可行性。
五、实验总结通过转子动平衡实验,我们深入了解了转子的不平衡现象及其对机械设备的影响,学习了转子动平衡的基本原理和方法,并掌握了转子动平衡实验的操作技巧。
实验结果验证了平衡措施的有效性,为进一步的工程应用提供了参考。
六、实验心得通过本次实验,我深刻认识到转子动平衡在工程技术中的重要性。
动平衡测定实验报告引言动平衡是一种常用的工程实践技术,主要用于修复旋转机械设备中的不平衡问题。
不平衡是指转子轴线与转动中心不重合,导致旋转机械在高速运转时会产生振动和噪音。
因此,动平衡测定是非常重要的,可以保证机械设备的正常运行和延长使用寿命。
本实验旨在了解动平衡测试的原理和方法,并通过实验测定一个简单系统的动平衡。
实验中,我们将学习如何使用动平衡仪测量转子的不平衡量,并采取适当措施去除不平衡。
实验过程1. 准备工作:准备一台动平衡仪,确保仪器工作正常;清洁转子,确保无脏物和杂质。
2. 安装:将转子安装到动平衡仪上,将传感器安装在平衡仪上的适当位置。
3. 初始测试:开启动平衡仪,进行初始测试。
记录下转子在不同位置的不平衡量。
4. 不平衡量测定:根据初始测试的结果,调整转子的位置,多次进行测定,直到找到转子的最佳位置。
5. 不平衡修复:根据测定结果,决定施加适当的修复方法。
可以在转子上添加配重物,也可以通过修改转子的结构来实现修复。
6. 修复测试:修复后,再次进行测试,检查修复效果。
7. 完成:记录实验结果,并将仪器归还至指定位置,清理实验台。
实验结果与讨论在实验中,我们测定了一个转子的不平衡量,并进行了修复。
最终,我们成功将不平衡量降低到了可接受的范围内。
实验结果表明,转子在不同位置的不平衡量差异较大。
通过不断调整转子的位置,我们找到了一个相对较佳的位置,减小了不平衡量。
在修复过程中,我们选择了在转子上添加配重物的方法。
通过精确地计算和安装配重物,成功降低了转子的不平衡量。
不确定度分析在实验中,我们也要对测定结果的不确定度进行分析。
不确定度的来源主要有以下几个方面:1. 仪器误差:动平衡仪的准确度会对测定结果产生误差。
2. 操作误差:操作人员在安装、调整和修复过程中可能存在误差。
3. 环境误差:实验环境的影响也会对结果产生误差。
为了减小不确定度,我们应该采取以下措施:1. 确保仪器的准确度,并进行定期校准。
电机动平衡标准等级电机动平衡是指电机在运行时,其转子的几何轴与转子的质量轴完全重合,没有离心力和偏心力,从而保证电机的运行稳定性和寿命。
电机动平衡标准等级是对电机动平衡质量的评价指标,标准等级越高,电机的动平衡质量越好。
1.转子质量不平衡量。
转子质量不平衡量是指转子在动平衡测试时,转子所产生的偏心距离。
偏心距离越大,转子的不平衡量就越大。
通常用克振动或毫米振动来表示。
电机动平衡标准等级将转子质量不平衡量划分为不同的等级,如G1、G2.5、G6.3等。
其中,G表示电机的通用机械等级,数字表示转子质量不平衡量的上限值。
该值越小,电机的动平衡质量越好。
2.转子质量不平衡相位。
转子质量不平衡相位是指转子在动平衡测试时,转子的不平衡质量所处的角度位置。
转子的不平衡质量不仅要考虑其大小,还要考虑其分布的是否均匀。
如果转子的不平衡质量分布不均匀,可能会引起转子在运行时的震动和噪音。
电机动平衡标准等级也会根据转子质量不平衡相位的要求进行评定,并将其划分为不同的等级。
3.转子质量不平衡修正精度。
转子质量不平衡修正精度是指在进行动平衡修正时,所要求的修正量和修正位置的精度。
电机动平衡标准等级也会根据转子质量不平衡修正精度的要求进行评定,并将其划分为不同的等级。
修正精度越高,说明电机的动平衡质量越高。
4.转子不平衡引起的振动水平。
电机在运行时,不平衡质量会引起电机的振动。
电机动平衡标准等级还会根据振动水平的要求进行评定,并将其划分为不同的等级。
振动水平越低,说明电机的动平衡质量越好。
在实际应用中,电机动平衡标准等级主要通过动平衡仪器进行检测和评价。
动平衡仪器通过测量电机在不同转速下的振动水平和相位,可以判断电机的动平衡质量,并给出相应的标准等级评定结果。
总之,电机动平衡标准等级是根据转子质量不平衡量、转子质量不平衡相位、转子质量不平衡修正精度和转子不平衡引起的振动水平等要素进行评价和划分的。
选择合适的电机动平衡标准等级,可以有效提高电机的运行稳定性和寿命。
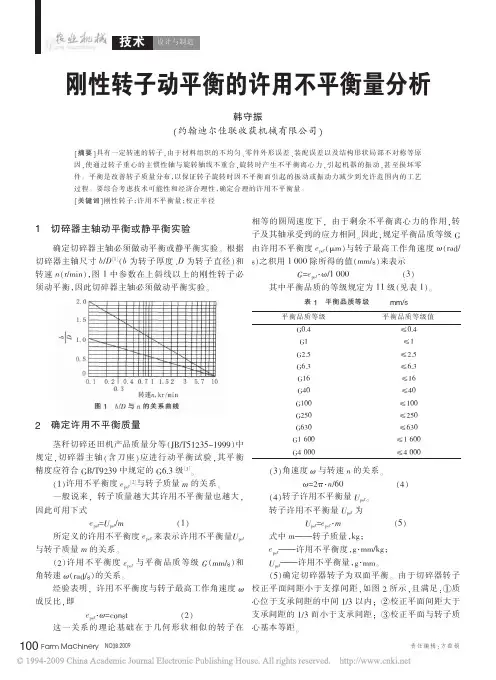
确定切碎器主轴必须做动平衡或静平衡实验。
根据切碎器主轴尺寸b/D[1](b为转子厚度、D为转子直径)和转速n(r/min),图1中参数在上斜线以上的刚性转子必须动平衡,因此切碎器主轴必须做动平衡实验。
茎秆切碎还田机产品质量分等(JB/T51235-1999)中规定,切碎器主轴(含刀座)应进行动平衡试验,其平衡精度应符合GB/T9239中规定的G6.3级[3]。
(1)许用不平衡度e per[2]与转子质量m的关系。
一般说来,转子质量越大其许用不平衡量也越大,因此可用下式e per=U per/m(1)所定义的许用不平衡度e per来表示许用不平衡量U per 与转子质量m的关系。
(2)许用不平衡度e per与平衡品质等级G(mm/s)和角转速ω(rad/s)的关系。
经验表明,许用不平衡度与转子最高工作角速度ω成反比,即e per·ω=const(2)这一关系的理论基础在于几何形状相似的转子在相等的圆周速度下,由于剩余不平衡离心力的作用,转子及其轴承受到的应力相同。
因此,规定平衡品质等级G 由许用不平衡度e per(μm)与转子最高工作角速度ω(rad/ s)之积用1000除所得的值(mm/s)来表示G=e per·ω/1000(3)其中平衡品质的等级规定为11级(见表1)。
(3)角速度ω与转速n的关系。
ω=2π·n/60(4)(4)转子许用不平衡量U per。
转子许用不平衡量U per为U per=e per·m(5)式中m———转子质量,kg;e per———许用不平衡度,g·mm/kg;U per———许用不平衡量,g·mm。
(5)确定切碎器转子为双面平衡。
由于切碎器转子校正平面间距小于支撑间距,如图2所示,且满足:①质心位于支承间距的中间1/3以内;②校正平面间距大于支承间距的1/3而小于支承间距;③校正平面与转子质心基本等距。
刚性转子动平衡的许用不平衡量分析韩守振(约翰迪尔佳联收获机械有限公司)[摘要]具有一定转速的转子,由于材料组织的不均匀、零件外形误差、装配误差以及结构形状局部不对称等原因,使通过转子重心的主惯性轴与旋转轴线不重合,旋转时产生不平衡离心力,引起机器的振动,甚至损坏零件。
上海正峰工业有限公司
转子动平衡量测试标准
一.目的:订定本公司之转子动平衡量测试标准。
二.适用范围:
“南荣”微电脑均衡机。
三.权责部门:
品保部IQC
四.检验标准:以图面为依据。
五.测试方法:
5-1准备一300mg之黏土。
5-2取预量测机型之标准转子,放上动平衡机调整同步转速。
5-3将黏土配置在转子矽钢片左侧(将黏土尽量压平),调整右平面分离,使右边仪表之值降至最小,然后调整左修正量使左边仪表之值为3.0 5-4将黏土取下配置在转子矽钢片右侧(将黏土尽量压平),调整左平面分离,使左边仪表之值降至最小,然后调整右修正量使右边仪表之值为3.0 5-5将标准转子取下,此时已完成机台之设定。
5-6将预测试转子放上机台即可测试,而仪表上之读值每0.01即代表1mg。
5-7测试出之数据依附件“转子特性一览表”之最大不平衡配重来判定。
5-8黏土之重量与修正量调整之大小,可依转子机型调整,不一定要用上述的值,只要能算出读值所代表之重量即可,其算法如下:
仪表上之读值每0.01=(黏土重量/修正量调整之大小)*0.01------mg
例如:黏土重量500mg,修正量调整为2.5
则仪表上之读值每0.01=(500/2.5)*0.01=2mg
六.不合格品之处置:参“不合格品处置办法”。
七.本标准经呈核准后实施,修改时亦同。
核准:拟案:
转子特性一览表。
发电机转子动平衡试验转速发电机转子动平衡试验是指在发电机运行过程中对转子进行平衡校正的一项重要测试。
转子动平衡试验是为了减少转子旋转时的振动和噪声,保证发电机的正常运行。
本文将从转速为标题的角度,对发电机转子动平衡试验进行详细介绍。
一、概述转子动平衡试验是在发电机装配完成后进行的一项重要测试,旨在检测和校正转子的不平衡现象,确保转子在高速旋转时能够保持稳定,减少振动和噪声。
转子动平衡试验通常在专用的平衡设备上进行,通过不断调整转子上的平衡块来达到平衡效果。
二、试验过程1. 准备工作在进行转子动平衡试验之前,首先需要进行准备工作。
包括对试验设备进行检查和校准,确保其工作正常。
同时,需要对转子进行清洁和检查,确保其表面光滑和无损伤。
2. 安装转子将待测试的转子安装到平衡设备上,并确保转子的轴线与平衡设备的轴线重合。
同时,需要根据转子的设计要求,确定转子的试验转速。
3. 开始试验启动平衡设备,使其旋转到设定的试验转速。
在转子旋转的过程中,通过振动传感器等设备实时监测转子的振动情况,并将数据反馈给平衡设备。
4. 检测不平衡量根据振动传感器提供的数据,平衡设备能够计算出转子的不平衡量。
不平衡量通常以质量单位表示,如克或毫克。
平衡设备会将不平衡量以图表或数值的形式显示出来,供操作人员参考。
5. 校正转子根据平衡设备提供的不平衡量信息,操作人员可以确定需要在转子上添加或减少的平衡块的位置和质量。
通过精确的调整和校正,逐步减小转子的不平衡量,直至达到要求的平衡精度。
6. 试验结束当转子的不平衡量达到要求的平衡精度后,即可结束试验。
停止平衡设备的旋转,并将转子从平衡设备上取下。
同时,需要对平衡设备进行清理和维护,以保证其正常使用。
三、注意事项1. 在进行转子动平衡试验时,需要严格按照操作规程进行操作,确保人员和设备的安全。
2. 在校正转子时,应根据平衡设备提供的数据进行准确的调整,避免过度或不足。
3. 在进行转子动平衡试验前,应对试验设备进行充分的检查和校准,确保其工作正常。
转子动平衡测试仪技术要求转子动平衡测试仪是一种用于测量和分析旋转机械设备转子动态平衡的专用设备。
它通过检测和分析转子在旋转过程中的振动信号,判断转子的不平衡情况,并提供相应的校正方法。
下面将介绍转子动平衡测试仪的技术要求。
1. 传感器选择:转子动平衡测试仪需要选择合适的传感器来检测转子的振动信号。
一般常用的传感器有加速度传感器和速度传感器。
加速度传感器能够测量转子的加速度振动,速度传感器则能够测量转子的速度振动。
根据具体的需求和转子特点选择合适的传感器。
2. 测量范围:转子动平衡测试仪需要具备较大的测量范围,以适应不同规格和类型的转子。
测量范围通常包括转速、振动幅值、相位等参数。
转速测量范围要能够覆盖转子的工作转速范围,振动幅值测量范围要能够检测到转子的微小振动,相位测量范围要能够准确测量转子振动的相位差。
3. 精度和分辨率:转子动平衡测试仪需要具备较高的精度和分辨率,以保证测试结果的准确性。
精度是指测试结果与真实值之间的偏差,分辨率是指测试仪器能够分辨出的最小变化量。
精度和分辨率的要求与转子的精度和平衡要求相关,一般要求测试仪器的精度和分辨率要高于转子的要求。
4. 数据采集和处理:转子动平衡测试仪需要能够实时采集和处理转子的振动信号。
数据采集要求采样频率高,以捕捉到转子振动的高频成分。
数据处理要求能够对采集到的信号进行滤波、谱分析、相位分析等处理,提取出转子的振动特征参数。
5. 结果显示和报告输出:转子动平衡测试仪需要能够直观地显示测试结果,并生成相应的报告。
结果显示要求能够展示转子的振动幅值、相位、频谱等信息,可以采用曲线、图表等形式。
报告输出要求能够输出为文档或文件形式,方便保存和查阅。
6. 操作简便性:转子动平衡测试仪的操作要求简单易懂,操作界面友好。
操作人员能够迅速熟悉仪器的使用方法,并能够根据测试结果进行相应的校正。
仪器的操作流程和提示要清晰明了,避免出现操作错误。
7. 安全性能:转子动平衡测试仪需要具备良好的安全性能,确保操作人员的人身安全和设备的正常运行。
第 43 卷第 2 期2023 年 4 月振动、测试与诊断Vol. 43 No. 2Apr.2023 Journal of Vibration,Measurement & Diagnosis转子许用剩余不平衡量的分析与试验∗葛玉柱1,雷雪梅1,张跃春2,方志翔1,卢璋1(1.湖南泛航智能装备有限公司株洲,412000)(2.湖南航翔燃气轮机有限公司株洲,412000)摘要针对转子平衡问题,分析了目前国际上常用的确定许用剩余不平衡量的方法,探讨了各标准及相关方法的原理、出发点及发展历史,明确了不同计算方法中各物理量的含义,提出了在使用不同方法时的注意事项和建议,比较了各方法所得出的许用剩余不平衡量引起的不平衡力以及所占轴颈静载荷的百分比。
通过试验验证了许用剩余不平衡量对高速叶轮机械振动和温度的影响。
对于常用的平衡品质级别:在现有常用动平衡机能达到的灵敏度内,美国石油协会(American Petroleum Institute,简称API)规定的许用剩余不平衡量最小,对轴承寿命的影响也最小;工程应用中,需考虑动平衡机的灵敏度,以确定合适的许用剩余不平衡量;许用剩余不平衡量应按照相应的准则分配到校正平面;确定许用剩余不平衡量的各方法所用公式中物理量的含义各不相同,具有较强的行业特征和时代特征,其中API考虑了动平衡机的灵敏度水平,更具技术先进性、经济性、可操作性及应用参考价值。
关键词转子;许用剩余不平衡量;平衡品质级别;分配;不平衡力;动平衡机灵敏度中图分类号TH132;TH442;O347.6引言转子不平衡是引起很多转子振动超标、提前失效或损坏的主要原因。
工程实践表明,汽轮机、压缩机、齿轮传动装置及叶轮驱动装置等带有旋转转子的设备,其运行平稳性与转子的动平衡品质密切相关。
因此,对转子进行合适的平衡是降低机器振动水平和噪声水平、提高机器使用寿命、可靠性和安全性的有效措施。
对转子进行平衡的目的是将转子的剩余不平衡量或者由不平衡引起的轴承动支承力、轴的挠度、振动值限制在规定的范围内。
关于长岭石化0219-P-105A/B转子不平衡的说明根据现场反馈的情况看,叶轮静不平衡量仅为1g左右,说明叶轮的静不平衡量完全可以满足设计要求。
从动平衡实验报告来看,现场进行了双面动平衡,面PLANE 1在356度方向上的动不平衡量为-57.8g,面PLANE 2在183度方向上的动不平衡量为-59.1g,这两个不平衡量特点是大小近乎相等,方向近乎相反。
因此可以看出,该试验数据是可以满足转子平衡要求的,数据单所显示的仅是转子不平衡力偶,不是转子不平衡量,偶不平衡相对于静不平衡可以忽略不计(此内容可以在GB9293-88上查到相关条款)。
在国家标准GB9239-88关于平衡作了如下规定:1.如果盘状转子的支撑间距足够大并且旋转时盘状部位的轴向跳动很小,从而可忽略偶不平衡(动平衡),这时可用一个校正面校正不平衡即单面(静)平衡,对具体转子必须验证这些条件是否满足。
从这个定义中不难看出,转子只做单面(静)平衡的条件主要有三个方面:1)转子几何形状为盘状盘状零件的确定依据是转子的直径D与转子的两校正面间的距离尺寸b之比是否大于6。
HP200-390H型泵,b=52mm,D=378mm,D/b=7.3,因此可以满足盘类零件要求。
2)转子在平衡机上做平衡时的支撑间距要足够大轴承跨距L与转子校正面间距b之比大于5以上均视为支撑间距足够大。
HP200-390H型泵,b=52mm,L=1020mm,L/b=19.6,因此可以满足支撑间距足够大的要求。
3)转子旋转时其校正面的端面跳动要很小。
因任何转子做平衡时都是经过精加工的,加工后已保证了转子的孔与校正面之间的行为公差,端面跳动很小的条件可以满足。
另外,标准还规定:在对转子在一个平面上平衡后,就可求得最大的剩余偶不平衡量,并除以支撑距离。
如果在最不利的情况下这个值S不大于许用剩余不平衡量,则采用单面(静)平衡就足够了.计算依据如下:U C= U CI,CII b 式1U CI,CII=mr 式2e= U C/L 式3U C 偶不平衡量g.mm2U CI,CII 大小相等方向相反分别作用在I,II校正面上的不平衡量g.mm2b 两校正面间距mmm 力偶的多余质量gr 转子最大半径mmL 两轴承跨距mmS 偶不平衡量与轴跨距之比经过计算S=12.52转子的许用不平衡度U PER=Me pere per=1000G/ωe per许用不平衡度G 动平衡等级取2.5ω 转子转速求得U PER=571.2g.mm因S<U PER,因此采用单面静平衡完全可以达到要求。
电機转子动平衡实验1.不平衡度2.不平衡量计算允许的不平衡量值U per,其中,不平衡烈度S u根据GB/T9239 / ISO1940可查。
3.允许剩余平衡量的分配允许不平衡量U per分配到两个矫正面U per1和U per2上的工作比较关键,分配转子允许不平衡量与转子的结构(形状,重心位置),支撑面和矫正面的设置有很大的关系。
分配原则:两个矫正面上的允许不平衡量U per1和U per2之和必须小于等于总的允许不平衡量U per。
转子为重心与两支承面不对称转子,所以左右两支承面的动载荷分别为:为了保证两支承面的动载荷不超载,两校正面的允许不平衡量U per1和U per2还必须满足式(6) 和式(7) 的约束条件:根据式(4) ~(7) 的约束方程,可得出两校正面的允许不平衡量U per1和U per2的取值不是惟一的。
图解法可直观地反映这点,用图解法可求出两校正面分配的允许不平衡量U per1与U per2的取值范围。
位于OXGR四边形内的任意点均满足式(6) 和式(7) 的约束。
因此,两校正面的U per1和U per2的解不惟一,如取G点,则左右两校正面U per1和U per2也可同时达到其允许不平衡量,但此时的U per1与U per2不相等,不利于大批量生产,同时左右两支承面U1与U2的动载荷也将出现在不利的相位上。
根据实践经验,取直角坐标的平分线与OXGR四边形的交点G’,此时的U per1 = U per2。
左右两支承面U1与U2的动载荷与其允许值可能出现微小的差别。
针对图1所示的转子结构,按一定比例对两校正面的允许不平衡量进行分配,设U per1 / U per2 = D,则D可按式(14) 计算:在实际操作过程中,为方便人员操作,将两校正面的允许不平衡量U per1与U per2进行变换,分别除以电动机转子两校正面上配重位置半径R,最终得到电动机转子两校正面的实际允许不平衡量U per1’ = U per1 / R;U per2’ = U per2 / R。
电机转子不平衡精度等级与偏心量电机转子不平衡精度等级是评估电机转子不平衡程度的指标,而偏心量是用来描述转子不平衡程度的物理量。
本文将分别介绍电机转子不平衡精度等级和偏心量的概念及其关系。
一、电机转子不平衡精度等级电机转子不平衡精度等级是评估电机转子不平衡程度的重要指标,通常用G等级表示。
G等级代表了转子在运转过程中的不平衡力矩的大小。
G等级越高,表示转子的不平衡程度越大。
根据国际电机制造业协会(EASA)的标准,电机转子不平衡精度等级可以分为六个等级,分别是G6.3、G16、G40、G100、G250和G630。
其中,G6.3是最低等级,G630是最高等级。
不同的等级对应着不同的不平衡力矩范围,也代表了电机转子不平衡精度的不同要求。
二、偏心量偏心量是用来描述转子不平衡程度的物理量,通常用质量不平衡量来表示。
偏心量定义为转子质量中心与转子旋转轴心之间的距离。
偏心量越大,表示转子的不平衡程度越大。
偏心量可以通过实验测量或计算得到。
实验测量方法是将转子安装在动平衡机上,通过测量转子在不同位置的振动信号,计算出偏心量的大小。
计算方法是根据转子的质量分布情况,通过数学模型计算出转子质心与旋转轴心之间的距离。
三、电机转子不平衡精度等级与偏心量的关系电机转子不平衡精度等级与偏心量之间存在着一定的关系。
一般来说,电机转子不平衡精度等级越高,对应的偏心量也越大。
具体而言,根据EASA的标准,不同的G等级对应的偏心量范围如下:- G6.3:偏心量小于等于1.6毫米- G16:偏心量小于等于4毫米- G40:偏心量小于等于10毫米- G100:偏心量小于等于25毫米- G250:偏心量小于等于63毫米- G630:偏心量小于等于160毫米可以看出,随着G等级的升高,对转子不平衡的容忍度也随之减小,要求转子的偏心量越小。
因此,对于高等级的电机转子,需要更加精确地控制转子的质量分布,以减小偏心量的大小。
四、电机转子不平衡精度等级与偏心量的应用电机转子不平衡精度等级和偏心量在电机制造和维护中起着重要的作用。