回转驱动选型表doc
- 格式:doc
- 大小:21.50 KB
- 文档页数:1
名词解释1. 最大允许转矩:在本产品系列中主要是对减速箱而言,减速箱的输出轴转矩随减速比的变化而变化,受材料、结构等多方面因素制约。
减速箱最大允许转矩指在保证强度、使用寿命等正常工况下可能承受(或输出)的最大转矩。
2. 传动效率:减速箱动力传递的效能。
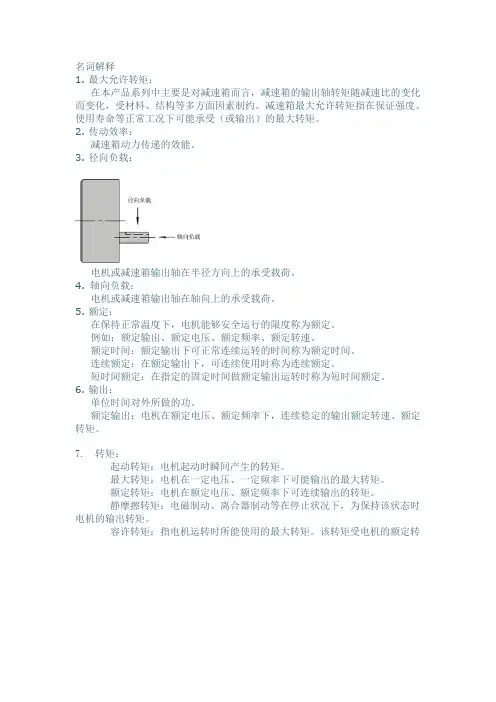
3. 径向负载:电机或减速箱输出轴在半径方向上的承受载荷。
4. 轴向负载:电机或减速箱输出轴在轴向上的承受载荷。
5. 额定:在保持正常温度下,电机能够安全运行的限度称为额定。
例如:额定输出、额定电压、额定频率、额定转速。
额定时间:额定输出下可正常连续运转的时间称为额定时间。
连续额定:在额定输出下,可连续使用时称为连续额定。
短时间额定:在指定的固定时间做额定输出运转时称为短时间额定。
6. 输出:单位时间对外所做的功。
额定输出:电机在额定电压、额定频率下,连续稳定的输出额定转速、额定转矩。
7. 转矩:起动转矩:电机起动时瞬间产生的转矩。
最大转矩:电机在一定电压、一定频率下可能输出的最大转矩。
额定转矩:电机在额定电压、额定频率下可连续输出的转矩。
静摩擦转矩:电磁制动、离合器制动等在停止状况下,为保持该状态时电机的输出转矩。
容许转矩:指电机运转时所能使用的最大转矩。
该转矩受电机的额定转矩、温升以及组合的减速箱强度所限制。
8. 转速:同步转速:电机的固定特性参数与电机的极数、使用电源的频率有关。
Ns=120f/P(r/min)Ns :同步转速(r/min)f :电源频率(Hz)p :电极极数空载转速:标准电机、可逆电机在无负载时的转速(比同步转速低1~5%)。
额定转速:电机在额定工况下的转速(比同步转速低5~20%)。
转差率:转速的表示方式之一。
S=(Ns-N)/N (r/min)S :转差率Ns :同步转速(r/min)N :任意负载时的转速(r/min)9. 停止过转量:电机输出轴从切断电源的瞬间到完全停止时,因惯性继续旋转的圈数(或角度)。
10.制动力:为使电机输出轴快速减速、制动停止,或使电机输出轴保持状态所施加于电机(转子)的力。
数控回转工作台的回转运动驱动电机的选择计算1.数控回转工作台的简介1.1回转工作台的概述回转工作台是数控刨台卧式铣镗床中不可缺少的重要部件之一,该部件主要用来承载被加工零件的。
并完成机床在X坐标方向作直线运动,和在B坐标上作360°回转运动。
其优点是:可以扩大机床的工艺范围,缩短加工中的辅助时间和提高零件的加工精度。
当零件装卡于工作台面上后,除可进行一般的镗孔、钻孔、铣削外,还可使零件作轴向移动和运转分度等工序。
数控回转工作台是由床身、滑座、工作台三个基本大件组成。
1.2数控回转工作台的主要技术规格:(1)回转工作台的台面尺寸1600×1800mm(2)回转工作台的总高度1110mm(3)回转工作台的载荷10000Kg(4)直线移动行程2000mm(5)回转工作台快速移动速度10000mm/min(6)回转工作台快速回转速度4r/min1.3数控回转工作台回转驱动的设计主要包括以下二个方面:(1)工作台回转驱动的传动系统设计;(2)工作台回转电机的选择;(3)传动零件的设计与校核。
这里重点论述驱动电机的选择。
2.工作台回转驱动电机的选择与计算2.1传动系统设计本文所讨论的大型回转工作台的工作面积为1600×1800mm。
数控回转工作台经过72:36齿形带轮,26:1蜗轮、蜗杆传动,136:17大齿圈和小齿轮的降速,使工作台快速回转速度达到1.5r/min。
2.2工作台回转电机的选择2.2.1工作台回转的传动比计算i=××=4162.2.2所需回转电机额定转速n=4×416=1664r/min2.2.3工作台回转的传动效率的计算η=η×η×η式中:η----轴承的传动效率,取0.98;η----齿轮的传动效率,取0.98;η----蜗轮、蜗杆的传动效率,需进一步计算。
η= (《机械设计》书11-21)式中:γ----普通圆柱蜗杆分度圆柱上的导程角;φ----当量摩擦角,φ=arctanf,其值可根据滑动速度v由《机械设计》书上表11-18或表11-19中选取。
回转驱动产品技术概要一、基础技术简介:回转驱动是在回转支承产品上衍生出来的具有高集成度和大减速比,且结构简单、使用与维护方便的特殊回转减速产品,由于采用回转支承作为从动件和框架基础,利用回转支承的内外圈分别实现驱动动力的输入和输出,使得回转驱动不但可实现360度全周无止点的回转,而且可同时在回转支承框架基础上安装驱动动力源,因此其传动效率高,是机械传动装置家族中的新成员。
又因其实质是一种减速装置,所以也可称为回转减速器、转盘减速器或驱动转盘。
回转驱动按照传动形式不同可分为齿轮传动和蜗轮蜗杆传动两类,根据传动副封闭形式不同又可分为开式和闭式两类,形式最简单的回转驱动就是应用在挖掘机、塔吊等工程机械产品上的驱动转盘,作为减速传动链的最后一环,这种回转驱动为开式齿轮传动,其前端还需配置一个大减速比的行星减速器作为其动力输入,所以只能称之为回转驱动的雏形,为扩大此类产品的应用范围,进一步提高产品使用和维护的便捷性,开发出了集成式蜗轮蜗杆传动的回转驱动,为了更进一步提高产品的驱动能力,包络蜗杆传动也被应用在此类产品上,配置有包络蜗杆的回转驱动不但驱动扭矩增大,驱动精度也进一步提高,更可进行数字化控制,故广泛应用于太阳能和风能发电设备上的跟踪和微调装置,另外在机器人、雷达、低速重载起重、举升设备、精密数控转盘等产品领域均有良好的应用效果。
汗王品牌回转驱动产品系采用自主技术和工艺开发的适应市场需求的高质量回转驱动产品,汗王品牌拥有全品系多规格的成熟回转驱动产品以及为客户需要定制设计和制造此类产品的能力,对于需要低速重载荷、高速中载荷和高速轻载荷的不同应用,汗王均可提供对应的产品或解决方案。
汗王的蜗轮蜗杆式回转驱动包括柱面蜗杆和包络蜗杆两大品类,其中柱面蜗杆适合中速重载应用而包络蜗杆适合低速重载和高精度应用,蜗轮蜗杆回转驱动可自锁,在动力运动领域可提供基础安全保障并进一步简化设备整体设计,是优越的工业配套件。
汗王的包络蜗杆回转驱动完全源自自有技术,加工工艺独特,加工过程全数控化,因此产品质量的可控程度极高,制造精度远远高出同类产品的水平,成品的性能亦远高出其他同类产品。

高空作业车回转支承轴承型号参数回转支承在高空作业车上的使用及工作原理回转机构,车载式高空作业车通常采用全回转式回转机构,正反转方向可根据作业需要进行选择。
回转机构的回转部分和作业平台均安装在回转支承即转台上。
驱动装置固定在转台上,其下端装有驱动齿轮。
回转支承由转台和与车架固定连接的内齿圈座组成。
回转机构由转台,摆线液压马达,蜗轮减速机,回转支承、小齿轮组成。
回转支承外齿圈固定在底架上,内圈与转台相连。
通过摆线马达转动带动蜗轮减速机转动,蜗轮机转动带动与其相连的小齿轮,通过小齿轮与外齿圈的啮合实现转台回转。
高空作业车回转支承的选型计算方法及常用型号静态选型:1、静态参照载荷Fa’和M’的计算方法●单排四点接触球式单排四点接触球式回转支承的选型计算分别按承载角45°和60°两种情况进行。
I、a=45°Ⅱ、a=60°Fa’=(1.225·Fa+2.676·Fr)·fs Fa’=(Fa+5.046·Fr)·fsM’=1.225·M·fs M’=M·fS然后在曲线图上找出以上两点,其中一点在曲线以下即可。
●单排交叉滚柱式Fa’=(Fa+2.05·Fr)·fsM’=M·fs适合高空作业车的回转支承型号及详细参数表01系列外齿型、11系列外齿型、QN系列,根据高了作业车的臂长、尺寸等不同,选择各系列回转支承大小也不同!具体选择型号根据具体车辆型号确定。
双正回转支承适用于高空作业车使用的回转支承生产加工流程及承载力介绍:1、首先对毛坯进行检查在加工前首先了解毛坯的材质、锻后状态。
其次要检查毛坯是否有叠层、裂纹等缺陷。
测量毛坯外型尺寸:内外径、高度尺寸、计算加工余量,较准确地估算出车削加工的分刀次数。
2、对毛坯进行车削加工粗车:根据车削工艺图纸进行粗车加工,切削速度、切削量严格按工艺规定执行(一般切削速度为5转/分钟。

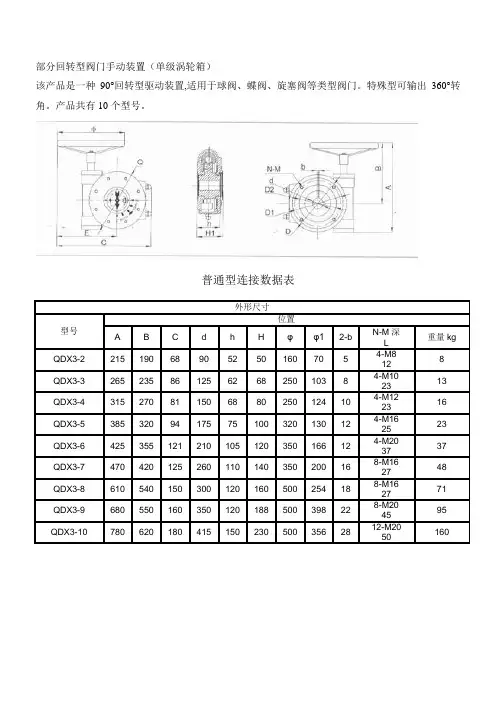
部分回转型阀门手动装置(单级涡轮箱)该产品是一种90°回转型驱动装置,适用于球阀、蝶阀、旋塞阀等类型阀门。
特殊型可输出360°转角。
产品共有10个型号。
普通型连接数据表外形尺寸型号位置A B C d h H φφ12-bN-M深L重量kgQDX3-2 215 190 68 90 52 50 160 70 5 4-M8128QDX3-3 265 235 86 125 62 68 250 103 8 4-M102313QDX3-4 315 270 81 150 68 80 250 124 10 4-M122316QDX3-5 385 320 94 175 75 100 320 130 12 4-M162523QDX3-6 425 355 121 210 105 120 350 166 12 4-M203737QDX3-7 470 420 125 260 110 140 350 200 16 8-M162748QDX3-8 610 540 150 300 120 160 500 254 18 8-M162771QDX3-9 680 550 160 350 120 188 500 398 22 8-M204595QDX3-10 780 620 180 415 150 230 500 356 28 12-M2050160技术数据型号 2 3 4 5 6 7 8 9 10 速比30:1 42:1 43:1 54:1 48:1 58:1 53:1 63:1 66:1 输入力矩Nm 40 78 98 112 122 133 156 156 156 输出力矩Nm 300 820 1050 1500 1460 1920 2060 2460 2574 旋转行程90°90°90°90°90°90°90°90°90°限位调整±5°±5°±5°±5°±5°±5°±5°±5°±5°连接尺寸连接法兰φ90 125 150 175 210 260 300 350 415 连接孔中心φ70 102 125 140 165 200 254 298 356 法兰凹面φ55×3 70×3 85×3 100×4 130×5 160×5 200×5 230×5 260×5 孔径:孔数M8×4 M10×4 M12×4 M16×4 M20×4 M16×8 M16×8 M20×8 M20×12 轴孔直径mm 14~18 22~26 28~32 35~38 38~48 45~58 55~70 75~85 90~100平键尺寸×条数×位置5×5 8×7 10×8 12×8 12×8×2×90°16×10×2×90°18×11×2×90°22×14×2×90°28×16×2×90°安装高度52 62 68 75 105 110 120 120 150 手轮直径φ160 240 280 320 350 400 500 500 500阀门参配蝶阀参配DN 80-100 125-150 200-250 300-350 400-450 500-500 700 800 900-1000 球阀门参配DN 50 80 100 150 200 250-300 350 400 500部分回转型阀门手动装置(双极涡轮箱)该产品是一种90°回转型驱动装置,适用于球阀、蝶阀、旋塞阀等类阀门。
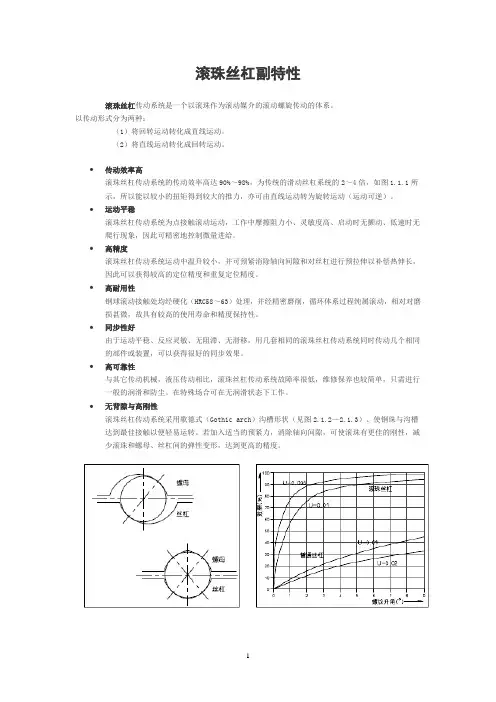
滚珠丝杠副特性滚珠丝杠传动系统是一个以滚珠作为滚动媒介的滚动螺旋传动的体系。
以传动形式分为两种:(1)将回转运动转化成直线运动。
(2)将直线运动转化成回转运动。
•传动效率高滚珠丝杠传动系统的传动效率高达90%~98%,为传统的滑动丝杠系统的2~4倍,如图1.1.1所示,所以能以较小的扭矩得到较大的推力,亦可由直线运动转为旋转运动(运动可逆)。
•运动平稳滚珠丝杠传动系统为点接触滚动运动,工作中摩擦阻力小、灵敏度高、启动时无颤动、低速时无爬行现象,因此可精密地控制微量进给。
•高精度滚珠丝杠传动系统运动中温升较小,并可预紧消除轴向间隙和对丝杠进行预拉伸以补偿热伸长,因此可以获得较高的定位精度和重复定位精度。
•高耐用性钢球滚动接触处均经硬化(HRC58~63)处理,并经精密磨削,循环体系过程纯属滚动,相对对磨损甚微,故具有较高的使用寿命和精度保持性。
•同步性好由于运动平稳、反应灵敏、无阻滞、无滑移,用几套相同的滚珠丝杠传动系统同时传动几个相同的部件或装置,可以获得很好的同步效果。
•高可靠性与其它传动机械,液压传动相比,滚珠丝杠传动系统故障率很低,维修保养也较简单,只需进行一般的润滑和防尘。
在特殊场合可在无润滑状态下工作。
•无背隙与高刚性滚珠丝杠传动系统采用歌德式(Gothic arch)沟槽形状(见图2.1.2—2.1.3)、使钢珠与沟槽达到最佳接触以便轻易运转。
若加入适当的预紧力,消除轴向间隙,可使滚珠有更佳的刚性,减少滚珠和螺母、丝杠间的弹性变形,达到更高的精度。
现代制造技术的发展突飞猛进,一批又一批的高速数控机床应运而生。
它不仅要求有性能卓越的高速主轴,而且也对进给系统提出了很高的要求:(1)最大进给速度应达到40m/min或更高;(2)加速度要高,达到1g以上;(3)动态性能要好,达到较高的定位精度。
高速滚珠丝杠副是指能适应高速化要求(40 m/min以上)、满足承载要求且能精密定位的滚珠丝杠副,是实现数控机床高速化首选的传动与定位部件。

已知条件:负载重量、工作压力、负步骤参数取值备注负载重量m(kg)(选填)10负载转动惯量矩J(kg.mm²)
3903SW中查询惯性张量回转角度θ(°)
120回转气缸0~190°回转时间t(s)
1.5安全系数K
5一般取5工作气压力P(MPa)
0.5应≤减压阀进口压力*85%角加速度α(rad/s²)
1.86α=2θ/t²所需转矩T(N.m)
0.04T=KJα最大角速度Wmax(rad/s)
2.79Wmax=2θ/t 负载最大动能Emax(J)
0.02E=J*Wmax²/2气缸基本型号HRQ 20
表1,表2缓冲方式(选填)液压缓冲
表2气缸型号气缸最大允许负载[mg](N)
150表3
mg≤[mg]附表1 SW查询惯性
张量示意图
说明:
1,惯性矩即SW软件中的惯性张量,其他CAD软件也可查询,注意在SW中先将旋转中心装配在Z轴(或X/Y轴)上,然后再查询质量属性,如附表1
2,回转气缸型号标识见附表2
3,角加速度公式出自亚德克手册,是经验公式
回转气缸选型向导(以亚德客为例)已知条件1,计算2,确定气缸型号HRQ 20 A 3,负载校核(选做校核合格
附表2 回转气缸型号标识
示意图
负载
表1 气缸允许
转矩
表2 气缸允许
最大动能
表2 气缸允许最大负载。
S l e w D r i v e P r o d u c t C a t a l o gST 205 USS t r o n g P a r t n e r s h i pThe strong partnership IMO has withBrück GmbH in Saarbrücken for seamless rolled rings and Brück AM in Zamrsk, Czech Rep., for CNC pre-machining, enables IMO to present a line of high performance, highquality Slewing Rings and Slew Drives.Brück is running five rolling mills with amonthly capacity up to 3,500 tons(7,700,000 lbs)!A strong partnership is created by Brück owners holding a 50 percent stake in IMO’s equity. For you as our customer, this enables IMO to be a fast, flexible and reliable SlewingRing and Slew Drive manufacturer.®®Rolling millEnsheim/SaarbrückenS l e w D r i v e s I n t r o d u c t i o nSlew Drive – what is it? What does it do?Where is it used?A Ball or Roller Slewing Ring to handle simultaneously occuring radial, axial and moment loadsHydraulic or electric motor to pitch or rotate the Slewing RingA totally enclosed housingA complete system, ready to install, consists of Bolt, connect, run… done!IMO -the driving force for innovative technologyAdvantages of IMO Slew DrivesinstallationsUsed by customers around the globe in:Vehicle and crane steering systems basket rotation such as excavators, grabs and fork liftsName plateType / serial numberReference number for spare part ordersGrease nipple For racewayGrease nipple For worm gearRoller Slewing RingAngular contact cylindrical roller bearing Inner ring with toothed worm gear Maximum load carrying capacityConnection point for attachments BrakesFeedback sensors / potentiometerHousingTotally enclosed Self-supportingName plateType / serial numberReference for spare part ordersHydraulic or electricCan be delivered without a motor Industry standard motor connectionGrease nipple For raceway For worm gearWorm driveHigh torque transmissionComplete toothed worm gearMaximum load capacity/extended life Reduced backlashSingle and double-lead wormSelf-locking and non-self-locking models For unit mountingDrive motorHydraulic/electricWith or without gearbox Single or twin motorsDrive pinionHardenedWith or without support bearing in the housingName plateType / serial numberReference number for spare part ordersS P S e r i e P r o d u c t D For bearing ring gearSP-L Slew Drive with three-phase electrical motor and spur gearboxWD-L 0223 Single Row Slewing RingWD-L 0223 Double Row Slewing RingWD-L 0343 Single Row Slewing RingWD-L 0419 Single Row Slewing RingWD-L 0419 Double Row Slewing RingWD-L 0478 Single Row Slewing RingWD-L 0625 Single Row Slewing RingIMO Slew Drives, with a wide range of standard sizes cost effective slewing solutions.W D -L S l e w D r i v e s O v e r v i e wBasic version WD-L 0419without motorVersion with hydraulic motorVersion with a three-phase electrical motor and spur gearboxFrameless worm gear with integrated Slewing Ring suitable for extreme high temperatures for a forklift rotator (IMO is providing the worm gear and the customer is assembling them in its own housing)The WD-H series is unique on the market!Our design solution is protected by international patents,allowing IMO to offer the unique combination of high torque and tilting moment capacities in the industries smallest footprints.W D -H S l e w D r i v e s O v e r v i e wSP-LE 0841SP-ISP-HC 0755 SP-MSP-HC 0655 SP-HSide loader with the steering gears of the WD-L 0223 and WD-L 0419 series; the high operating time requires the useUndercarriage of a harbor mobile crane with WD-HC 0300 steering gears; In combination with the hydraulic motor, the gearpotentiometer indicates the position of the With the capacity to handle extreme tilting moments, high output torques, all in a compact design, the IMO WD-H Slew Drives especially suited as steering devices .In addition, integrated position feedback sensors support computer controlled steering systems.Using IMO Slew Drives, cranes and special vehicles achieve maneuvring capabilities including turning on the spot.Small manlift on a crawler chassis with a WD-L 0223 Slew Drive.This bridge inspection equipment uses Slew Drive WD-HC 0300in the boom joint. The unit isable to accomodate the suspended loads and isTelescopic working platform with a WD-L 0419 Slew Drive.This working platform with a height of 115 ft uses two IMO Slewing Rings on a synchronous rotating turntable which areThe special series SP-IC 0841 with two direct hydraulic motors was developed for this special crane , used for roof top operations.26This rotation and tilting device of a front loader uses an IMO Slew Drive, model WD-LC 0419 with twin motors (double the torque).Cemetery excavator with the IMO Slew Drive WD-L 0343.Instead of a traditional large diameter toothed Slewing Ring,this manipulator uses a compact Slew Drive WD-HC 0373 with twin To ensure that the blasthole boring toolSP-Slew Drives are used inautomation systems . Picture: Slew Drive SP-LE 0641 with three-phase electrical motor and spur gearbox.Manipulator for turning concrete parts with Slew Drive WD-HE 0373.Bank mower with Slew DriveWD-L 0419, double row series.A p p l i c a t i o n s P o s i t i o n i n g / A u t o m a t i o nWD-series fitted with electric motors used for the yaw and pitch controls of this solar table .B hC axC radC0 axC0 rad D LED B ED B ’ED max ’f af MdF axF axDF radF rad maxF spG wimM AM d BM d nom M d max M h Basic rating life in operating hoursBasic axial dynamic load ratingBasic radial dynamic load ratingBasic axial static load ratingBasic radial static load ratingRaceway diameter(see Product Overview P. 4/5)DutyDuty per minuteMaximum permissible duty of rotation per minute (see diagram series description)Application service factorRatio of operating torque to maximum torqueEquivalent axial load including all occurring shock loads and required safety factors, calculated from all axial forcesEquivalent axial load including application service factor for determining the load point in the limiting load diagramEquivalent radial load including all occurring shock loads and required safety factors, calculated from all radial forces; the effective gearing circumferential force has to be consideredLimit value for checking frictional contactInitial preload on boltLimit valueGear ratioModuleTightening torque for mounting boltsOperating torqueNominal torqueMaximum torqueMaximum holding torqueSymbols and unitshlbslbslbslbsin%%/min %/min ——lbslbslbslbslbsh—mmft-lbs ft-lbs ft-lbs ft-lbs ft-lbs M kM kDM WM WAnn permn bSF1SFS 1SFS 1.75SwQz1z2αA∆pδkδk permδpδvδwEquivalent tilting moment including all occurringimpact loads and required safety factors,calculated from all axial and radial forces thatcause the tilting effectEquivalent tilting moment including radial loadand application service factor for determiningthe load point in the limiting load diagramFriction torque of the Slew Drive under operatingload in the installed stateFriction torque of the Slew Drive, unloadedOperating speed of Slewing RingPermissible operating speed of Slewing RingNumber of fastening holes per bearing ringSeries SP: Safety factor against tooth base fatigueSeries WD: Safety factor against tooth wearSeries WD: Safety factor against tooth fractureSeries SP: Safety factor against static tooth basefractureCalculation safety factor 1.3 for wear diagramOil flowNumber of teeth, pinionNumber of teeth, Slewing RingBolt tightening factorPressure differentialTilting clearance increaseMaximum permissible tilting clearance increaseMaximum permissible flatness deviationMaximum permissible deformation of mountingstructureMaximum permissible perpendicularity deviationft-lbsft-lbsft-lbsft-lbsrpmrpm————————psiininininingal(US)/min33GeneralFunction of Slew DriveSlew drives comprise a highly robust Slewing Ring provided withgear teeth (1), one or several toothed drive elements (2), a wormgear in this case, seal (3), housing (4) and a hydraulic or an electricdrive (5). Slew Drives are designed for grease lubrication.In a Slew Drive the rolling elements (6) carry the load between theinner ring (7) and outer ring (8). The raceway system’s capacity isdetermined predominantly by Slewing Ring design, the depth ofhardening and the number and size of the rolling elements. Spacers(9) separate the rolling elements and minimise friction and wear.F axF radM KLoad distributionDepending on external load, the load distribution contact and theangle around the rolling elements will vary.In the case of axial load, all rolling elements are loaded in the samedirection.In the case of radial load, a segment of the rolling elementscarries the load.In the case of tilting moment load, a segment on one side and asegment on the opposite side carry the load.Mostly, a combination of axial, radial and tilting moment loadsoccur.••••19624357832TorqueThe operating torque may not exceed the maximum torque specified in the Technical Data section, calculated with application service factor 1. Explanations of different torque specifications are as follows:Series SP:Maximum torque M d max :Slew Drive series SP-H, SP-M:Maximum torque is limited by maximum radial load of the planetary gear-set used.Slew Drive series SP-L, SP-I:The maximum torque is calculated with a safety factor against static tooth base fracture SFS 1.75.Nominal torque M d nom :The nominal torque is calculated with a safety factor against tooth base fatigue SF1, at the rotational output speed specified in the Technical Data section, under one-way varying load.DutySlew Drive series WDs are designed for intermittent duty. Application with continuous running or with higher rate of duty and simultaneously high output torque are not permissible.This would lead to unacceptable temperature increase in the gearing and thus to premature failure of the Slew Drive.Transmission of the maximum torque is to be limited to 10% of each minute. Please check the diagram for the maximum permissible duty per minute of the respective series on P . 53 and P . 63.Static capacity of racewayStatic capacity of the Slew Drive is determined by:• Hardening depth of the raceway• Number and size of the rolling elements • Slewing Ring design • Raceway geometryThe limiting load diagram shows permissible axial and tilting moment loads for a respective size unit.Every loading case including the required or recommended safety must lie below the limiting load line.Series WD:Maximum torque M d max :The calculation of the maximum torque with a safety factor against tooth fracture SFS 1 is done according to G. Niemann / H. Winter, Machine Elements, Band III, 1986,for worm gears and is influenced by:• Limiting value of tooth base stress • Module• Gearing widthNominal torque M d nom :The nominal torque is calculated with a safety factor against tooth wear of SF1,• at the output speed specified in the table • for a calculated service life of 10,000 h • at a duty of 5%For Slew Drives with two motors, the specified values are valid for a slewing angle of ≤ 170°.Series SP and WD:Maximum holding torque M h :The maximum holding torque determines which retroactive torque can be transmitted or held without damage being caused to the gearing. In general, the value of the maximum torque is assumed.Rotational speed Slew Drive series SP:The maximum permissible speed isSlew Drive series WD:The maximum permissible speed is specified in the Technical Data section. For higher speeds, our Engineering Department should be consulted.Limiting load diagrams are valid under the following condition:Static loadingLimiting load line with safety 1Clamping length of bolts, minimum 5-times, maximum 10-times the bolt diameterContinuous threads up to the bolt head is not permissibleBolts of quality class SAE Grade 8 for series WD-LA and quality class 10.9 according to DIN EN ISO 898 for the other series All mounting holes used “Compressive” loadAdequately stiff and level mounting structure (see chapter “Installation and Maintenance Instructions” on P . 46 - 51)Minimum strength of the mounting structure 72,520 lbs/in 2Radial loading considered as specifiedCompliance with “Installation and Maintenance Instructions“•••••••••••1570D Ln perm =34Radial loads must be transmitted by means of frictional contact between Slew Drive and the attached structure.A good bolt connection is vital for satisfactory function of the Slew Drive. Bolt connection and tilting clearance of a Slew Drive must be checked regularly.••Axial loads can be “compressive“ or “suspended”.A “suspended” axial load and the load on a rising segment in tilting moments must be adequately resisted by mounting bolts.••GearSlew Drives of series WD are designed with worm gear.Slew Drives of series SP are designed with spur gear. Permissible torque is specified in the Technical Information section.DriveDrive is provided by either an attached hydraulic or electric motor.Both motor mountings as well as the shaft/hub connection conform to industrial standards, hence hydraulic motors available on the market can be mounted without difficulty.For electric motors, corresponding adapter pieces are necessary. The design specification for drive motors is undertaken by IMO, based upon rotational speed and torque information provided by the customer.HousingHousing is designed as a welded or cast component and adapted to the size of the Slew Drive. As a standard feature, housings are supplied with a priming paint.All catalog bolt data is valid only for “compressive” loads!SealingPolymer seals protect the Slew Drive from normal dirt penetration,dust and light sprayed water. For very dirty and wet environments,the seals shall be protected with pre-mounted labyrinth seals on the mounting structure.Performance and reliability of a Slew Drive depend strongly on avoiding ingress of contaminents to the interior of the unit.Pressure washing must not be used to clean Slew Drives.Operating temperatureStandard version IMO Slew Drives can be used in ambient temperatures from –4°F up to +158°F .Selection criteriaThe following criteria must be considered for the correct selection of a Slew Drive.Position of the output shaft Vertical:Slew Drives of all series can be used(even with a self-locking gear).Horizontal:Alternating:Slew Drives of all series can be used with exception ofseries WD-H. Here, it is necessary to use a Slew Drive with a 2-start gear, since using gear with self-locking and external driving force does not ensure smooth (jerk free) operation.Slew Drives provided with self-locking gear cannot beused. Using a Slew Drive of series WD-H with 1-start gear without self-locking is possible only up to 10°inclination angle to the vertical, otherwise smooth operation cannot be guaranteed.Slew Drives that are not self-locking can, as an option, be equipped with a locking brake, if required (see optional attachments for details).Caution: Catalog bolt data is not valid in this case!LoadsExternal forces such as axial load, radial load and tilting moment must lie below the static limiting load curve, as regards their operating load point. For this, please refer to the chapters “Static capacity of raceway“ and “Mounting bolts”.Shocks, vibrationsTo account for the peculiarities of different applications, the shock factors for gears should be considered. Slew Drives of the series WD are not suitable for applications under permanent vibration.Back loadKeep in mind that in the case of series WD Slew Drives, due to the high gear ratio, that in the case of back load (e.g. caused by boom impacting on obstacle), there is danger of irreparable damage to the worm gearbox, so long as the driving torque exceeds the maximum permissible table values Md max .36To address the peculiarities of different applications, the following application service factors are to be considered in the prevailing Application service factors are to be considered in the following equations for the prevailing loads:Slew Drive: pre-selected SP-M 0741/2-05894The following values are achieved with an application service factor of 1.25:F axD = F ax • f aTo account for the prevailing radial load, the tilting moment is increased accordingly.This equation applies only if:Should the value be exceeded, the limiting load diagram no longer applies.Please contact our Engineering Department.Calculation example:Application:Load:Slewing equipment for a construction machine under normal operation Axial loadRadial loadTilting moment load lbs lbs ft-lbsF axD = 12,400 • 1.25 = 15,500 lbsAt this point it can be verified in the limiting load diagram, whether or not the pre-selected Slew Drive is statically adequate.If the operating load point lies below the limiting load line then the Slew Drive is statically adequately dimensioned. If loads frequently occur during the slewing process, the selected type should be reevaluated dynamically for lifespan. For this, please contact our Engineering Department.Mounting boltsPrevailing loads must be safely transmitted. T o ensure this, mounting bolts should be sized to handle the raceway loading.The bolt curve is depicted in the static limiting load diagram, subject to the following conditions:Caution: In the case of “suspended” loads, the bolts are subject to additional tensional forces.Please contact our Engineering Department.Static load carrying capacity of mounting boltsDetermining the operation load level, both with and without radial load, occurs along with the verification of the static load carrying capacity of the raceway.If the prevailing load case lies below the limiting load line in the static limiting load diagram then the bolt connection is statically adequately dimensioned.•••Quote the fulfillment of the conditions in the case of considering the static load Slew Drive capacity of the raceway.Bolts are appropriately tightened with a torque wrench(bolt tightening factor αA = 1.6). For tightening torques, see table P . 48For Slew Drives with through holes, use the largest possible metric bolts with regular threads.M kD = (M k + 0.1442 • F rad • D L ) • f aF rad ≤ 0.0671 • M k + 0.5 • F ax12,4001,40064,000M kD = (64,000 + 0.1442 • 1,400 • 29.173) • 1.25= 87,362 ft-lbs37Friction torqueThe friction torque in Slew Drives depends upon many influence factors, e.g.:• Rigidity and flatness of the mounting structure • Load and loading combination• Rotational speed and operating temperature • Design of Slew Drive• Number and frictional torque of seals • Lubrication grease and level of filling • Manufacturing tolerances • Other factorsThe friction torque of an unloaded Slew Drive can be determined approximately with the following equations:Slew Drive series SP , with minimum Slew Drive clearance greater than zeroM wA = 0.0476 • D L 2Slew Drive series WD-L, with preloaded Slew DriveSlew Drive series WD-H, with preloaded Slew DriveDynamic load Slew Drive capacity of mounting bolts Mostly, static dimensioning of a mounting bolt is sufficient.In cases where very high numbers of stress reversals act on the Slew Drive, dynamic verification is necessary. For this, please contact our Engineering Department.Pressure lock of mounting boltsWhen radial loads act on the Slew Drive, it must be ensured that these loads can be transmitted without shearing forces occurring inside the bolts. Therefore, it must be determined whether the radial load can be transmitted via frictional contact between the mounting structure and the Slew Drive.n b = number of fixing holes per ringF sp = pre-stressing force on a mounting boltIf the prevailing radial load exceeds the limit value, we request that you contact our Engineering Department.F rad max =n b • F sp18.8For Slew Drives with a different number or size of bolts in the inner and outer ring, the permissible radial load is to be determined for both rings. The smaller value is the limiting value.Frictional contact prevails if F rad max is greater than the prevailing radial load.Slew Drives, series WD-H, are basically to be centralized.Securing the mounting boltsWhen a customer desires that the mounting bolts be secured, we recommend the following products (manufacturer specification is valid):Loctite ®Application of Loctite 270 is suitable for the highest level ofconnections. This prevents loosening and the threads are also sealed.Nord lock ®Nord lock, self-locking washers, are recommended for cases of vibration or dynamic loading cycles. Due to a pair of square tapered washers with tapered surface gradients between both Nord-lock securing washers greater than the gradient of the bolt threads, any loosening tendency of the bolt is immediately prevented.Other bolt securing systems are not recommended.The friction torque for a Slew Drive under load can be determined with the following equation, approximately:M w = 0.000417 • (52.8 • M k + 4 • D L • F rad + D L • F ax ) + M wAGearSlew Drive series SP Type of gearSlew Drives series SP are provided with spur gear according to DIN 3960, DIN 3962 and DIN 3967.If higher torque is necessary or longer operating lifespan is required,it is possible to manufacture the gear in tempered or hardened form.Permissible torqueCorresponding data is available in the Technical Information section.Drive pinionThe pinions used in different sizes are provided with hardened gear.In the Technical Data section you will find data about transmission ratios and numbers of teeth.For the direct drive (SP-L, SP-I), the drive pinion is equipped with a radial bearing that is integrated in the motor flange.In the case of Slew Drives equipped with planetary transmission, the drive pinion is mounted via the planetary transmission.M wA = 0.476 • D L 2M wA = 0.952 • D L 238LifespanThe expected lifespan of the gear depends on the operating conditions.The following factors are key:• Torque• Output speed • Duty factor• Ambient temperature, etc.LubricationTo ensure flawless operation and long usable life, adequate and regular lubrication is necessary. The grease fulfills the following functions:For the raceway:• Reduction of friction and wear in the rolling contacts • Corrosion protection • Lubrication of seals• Additional sealing effect of the grease “collar”For the gears:• Smooth running • Less wear• Reduced operation noise • Longer operating life • Less heat development Initial greasingIMO Slew Drives are supplied pre-lubricated. High-quality lithium-complex grease, based on mineral oil, with EP-additives according to DIN 51825, KP2P-20 is the standard lubrication.Regreasing intervalsRegreasing must be done at regular intervals, depending on frequency of use and ambient operating conditions. General attention must be paid to ensure that the grease used during the greasing is compatible with the sealing material. Special attention should be paid to ensure that lubricating grease types originally specified are used throughout the life of the unit.Should you wish to use other types of grease, it must be verified whether the grease is compatible with that used for initial greasing.Please contact your grease manufacturer.Please observe also the data in the “Installation and Maintenance Instructions” chapter.Beside regular regreasing during operation, it is also necessary to grease the Slew Drive after long standstill periods. Equally important is to grease the equipment in which the Slew Drive is integrated after cleaning.Tooth backlashTooth backlash is factory-set at the highest point of the gear. It depends on the module of the gear and is calculated according to the following formula:Tooth backlash to be set = 0.00118 to 0.00157 • module Slew Drive series WDDesign of the gearSlew Drive series WD is designed with a hardened worm gear according to DIN 3960, DIN 3962 and DIN 3967,Permissible torqueCorresponding data is provided in the published T echnical Information section.Worm shaftWorm shafts are made of hardened steel, with ground tooth flanks.Tooth backlashThe tooth backlash is set at approx. 0.0118 in for Slew Drive series WD.Self-lockingSeries SP Slew DrivesSeries SP Slew Drives are not self-locking.Series WD Slew DrivesSelf-locking only exists in the case of series WD Slew Drives if it cannot be driven from the output side. Self-locking is directly related to the efficiency of the Slew Drive, which depends on very many factors, e.g.• Lead angle• Angle of friction • Rotation speed • Lubrication• Material matching • Surface finish, etc.Theory indicates self-locking occurs if the gear efficiency is < 50%.Data in the Technical Data section conforms to this statement.However, it is vital to determine the actual existence of the self-locking characteristics in the supplied Slew Drive individually during actual usage.We take no responsibility for conformity of the theoretical data in the Technical Data section with the practically prevailing self-locking or non-self-locking characteristics.Shock coefficientAs for the applications in which impact is expected, the appropriate impact coefficients must be considered when determining the Slew Drives’ maximum torque rating.39ATTENTION:Slew Drives must not be cleaned with pressure washing equipment. During pressure washing, large amounts ofpressurized water can penetrate into the Slew Drive through the sealing gap and cannot be removed, even by massive re-greasing. This will strongly reduce the usable lifespan of a Slew Drive.Mixing greasesGrease with different thickener and base oil should generally not be mixed. The manufacturer should always confirm if different grease types can be mixed.Shelf life of lubricantsLubricants are subject to ageing even if unused. If after 3 years grease is not yet used, it should be replaced.Design of mounting structureSafe transmission of application loads and reliable operation of Slew Drives is achieved, along with other factors, through using adequately designed mounting structures.To ensure safe operation of Slew Drives, there are certain minimum requirements to the mounting structure.• Sufficient rigidity (see “Installation and Maintenance Instructions”)• Maintain flatness according to “Installation and Maintenance Instructions“• No hard points (e.g. through cross beams)• Surfaces for bolts must be machined plane • Hollow mounting structure is preferred • Use all mounting bolts• Bolts of recommended strength should be used• Minimum strength of attached structure 72,520 lbs/in 2Very different mounting structure solutions can be used, depending upon maximum load and application.If hollow mounting structure is designated for attached structure,flange thickness should be at least 50 % of Slew Drive’s overall height. The thickness of the hollow mounting structure should be about 30% of flange thickness. For weight-critical applications,flange thickness can only be reduced if appropriate stiffening ribs are provided and the specifications on permissible flatness and perpendicularity deviations and deformation under load are upheld.Values on this are specified in the“Installation and Maintenance Instructions“ P . 46 - 51.。
回转驱动装置标准
回转驱动装置是一种常见的、广泛应用于现代机械设备中的传动机构,它能够帮助将活动元件(如主轴、活塞、滑台等)旋转,以实现机械系统的正常运行。
回转驱动装置的设计参数涉及到多项技术要素,设计质量的高低,直接关系到机械系统的运行效率和整体安全性。
因此,对回转驱动装置的设计标准十分重要,这一标准可以保证装置在正常运行期间正确运行,达到最高效能,确保设备安全可靠。
回转驱动装置的设计标准包括:转矩设计、电机选型、轴承配置、齿轮箱设计、润滑特性设定、极限值设定、控制系统安装、传动噪声检测、可靠性验证等多项内容。
首先,回转驱动装置的转矩设计是非常重要的,需要根据应用需求确定转矩的大小,并以安全系数(一般为2)作为参考,充分考虑装置在高低转矩状态下的运行特性和效率情况,再结合应用系统的空间条件来确定最佳的转矩参数。
其次,要根据轴承重量和电机参数来选型,保证电机功率、电流和转速是否符合设备需求,以及能否满足装置实际运行情况。
此外,要根据轴承重量和轴承安装空间来设计轴承配置,保证装置轴承能承受应用系统中给定的重量和载荷,避免因结构设计不当导致装置故障和减少寿命。
此外,对于齿轮箱设计也是非常重要的,需要根据电机的功率和转速,以及装置的齿轮比比例和空间限制,确定最佳的齿轮比例和齿轮箱结构,以确保装置运行效率和安全性。
接下来,润滑特性设定非常重要,需要根据装置的工作温度范围等特性,调整润滑油的粘度,保证装置工作期间的润滑状态,防止因油位过低而导致的装置损坏和故障。
回转驱动装置标准
回转驱动装置是一种用于将动力输入转换为机械能量的常用设备。
它以旋转的形式提供机械能量,产生旋转力矩和动力,用于驱动机械装置。
它包括电机、变速箱、减速机和传动装置等多种组件。
电机是回转驱动装置的核心元素,是将电能转化为机械能量的装置。
其质量、安全性、输出性能和可靠性等都是对回转驱动装置性能的重要影响因素。
因此,在采购和安装电机时,必须严格遵守国家电机的相关标准和要求。
变速箱是一种用于将电机的转速变换为恰当的旋转速度和恰当
的动力的设备。
它具有调速范围广、动力传递系数大、可靠性高和维护保养方便等优点。
变速箱在回转驱动装置中扮演着非常重要的角色,传动效率和使用寿命的高低往往受到变速箱的影响。
因此,在采购变速箱时,必须严格按照国家变速箱标准和要求进行。
减速机是一种用于将高速旋转输入转变为低速旋转输出的装置。
它具有效率高、体积小、荷定、防潮性能和使用等特,是一先且可靠的有效驱动方式。
国家有细化减速机标准,在购买减速机时,应遵守这些标准,以获得更好的使用效果。
传动装置是回转驱动装置的重要组成部分,是将电机的转速变换为动力的装置。
它有良好的耐用性和可靠性,可以传输轴向和转角力矩,用于传递传动能量。
在采购和安装传动装置时,也要按照国家有关标准和要求进行。
回转驱动装置是机械装备常用的驱动装置,具有结构简单、体积
小、低能耗和质量可靠等特点。
此,在采购和安装时,应严格按照有关标准和要求,以保证回转驱动装置各组成部件的机械质量和可靠性,不仅有利于提高其可靠性,而且还可以大大降低故障率,确保安全可靠的运行。
回转驱动装置的应⽤回转式减速器是回转⽀承的升级产品,通常由蜗杆、涡轮式回转⽀承、壳体、动⼒源组成。
壳体采⽤优质铸钢具有⾮常⾼的强度,蜗轮蜗杆均采⽤42CrMo并经辉光离⼦淡化,耐磨性强度均⾼于国内传统的⽓体氮化的50Mn材质,和国内其它包络环⾯蜗杆相⽐硬度更强使⽤寿命更加长久。
该产品可以⽤于平板运输车、吊⽊机,单柱起重机,提梁机,随车吊、⾼空作业车、巡⽇太阳能,⾃动化设备等机械设备上;在太阳能光伏发电⾏业,回转驱动装置⼀般配直流⾏星减速电机或交流减速电机为主;在⼯程机械上主要配液回转齿轮装置、回转减速机、回压马达作为动⼒驱动系统。
回转式减速器其他称谓:回转驱动装置、回转齿轮装置、回转减速机、回转转盘装置、蜗轮蜗杆传动、涡轮蜗杆副、蜗轮蜗杆副、涡轮蜗杆装置,主要应⽤在航天航空、塔吊机、挖掘机、⼯程机械、卫星接收系统、太阳能跟踪系统等诸多⾏业。
特别是近⼏年发展迅猛的太阳能光伏发电⾏业的应⽤⼗分⼴泛回转驱动副的规格型号⼤⼩不⼀,分SE/PE/ZE/WE/VE/PVE/ZVE/ZDE等 3”、5”、7”、9”、12”、14”、17”、21”、25”等规格。
型号标注中的“SE”代表:Slewing和Enclose的英⽂缩写。
由于核⼼部件采⽤回转⽀承,因此可以同时承受轴向⼒、径向⼒、倾翻⼒矩。
回转驱动副具有安装简便、易于维护、更⼤程度上节省安装空间。
该产品可以⼴泛使⽤于重型平板运输车、集装箱起重机、随车吊、⾼空作业车、巡⽇太阳能发电机系统等⼯程机械及新能源领域。
回转驱动装置可基本分为单蜗杆传动回转驱动装置和双蜗杆传动回转驱动装置。
回转机构的特点:1.可以得到很⼤的传动⽐,⽐交错轴斜齿轮机构紧凑。
2.两轮啮合齿⾯间为线接触,其承载能⼒⼤⼤⾼于交错轴斜齿轮机构。
3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪⾳很⼩。
4.具有⾃锁性。
当蜗杆的导程⾓⼩于啮合轮齿间的当量摩擦⾓时,机构具有⾃锁性,可实现反向⾃锁,即只能由蜗杆带动蜗轮,⽽不能由蜗轮带动蜗杆。
堆取料机回转驱动电机功率的分析与计算摘要本文介绍了堆取料机回转驱动设计方案及驱动电机的功率计算。
关键词回转驱动;回转阻力;回转电机驱动功率回转机构是由回转支承装置和回转驱动装置两部分组成,对于斗轮堆取料机而言,由于回转大轴承相对于其它回转支承方式的优点是,有效的降低设备重心,增大设备的抗倾翻能力,所以得到广泛的应用。
常规的回转驱动装置的传动方案有三种,第一种方案:立式电机+立式圆柱齿轮减速器;第二种方案:卧式电机+涡轮减速器;第三种方案:立式或卧式电机+安全连轴器+立式行星减速器+小齿轮外啮合,由于行星减速器传动比大,结构紧凑,是回转驱动装置较理想的传动方案,斗轮堆取料机也采用此种传动方式。
现就针对第三种方案提出设计方案和计算方法。
1回转驱动装置结构简介回转驱动布置在设备的有相对回转运动的两个部件间,一般以回转支承分界,上部是回转部件,下部是不动的基础部件。
回转支承将两个相对回转部件固定,同时将整个回转支承上部的所有载荷(垂直载荷、水平载荷、弯矩、扭矩等)传递到下部的基础上。
回转支承内侧或外侧为齿圈结构。
回转驱动固定在回转支承上部的平台(构件)上。
通过小齿轮与齿圈的啮合,达到回转的目的(见图1)。
图1堆取料机回转驱动主要布置形式2以斗轮堆取料机回转驱动为例原始参数:回转机构支承132.50.3550,03,模数m=22,齿数Z1=176,变位系数X1=+0.5,驱动装置由卧式电动机+安全连轴器+制动器+行星减速器+小齿轮,6级电机。
回转部件总质量Gi=回转轴承承载轴向力Fa=2028400N,径向力Fr=50760N斗轮挖掘力F挖=14448N,滚道平均直径D=3550mm,重心相对回转中心最大偏移量(非工作)Li=1.5m。
2.1电机功率选择1)臂式斗轮堆取料机的回转阻力矩主要有摩擦阻力距T摩、坡道阻力矩T 坡、风阻力矩T风、启动惯性力矩T惯(带物料)或侧向切削力矩T切。
通常侧向切削力矩T切>启动惯性力矩T惯(带物料),所以计算电机功率时不考虑启动惯性力矩T惯。