红外控制步进电机启动
- 格式:docx
- 大小:4.22 MB
- 文档页数:20
11自动化《单片机应用课程设计》选题1.基于STC89C52RC单片机抢答器的设计基本要求:(1)设计一个智力竞赛抢答器,可同时供8名选手或8个代表队参加比赛,编号为0、1、2、3,各用一个按钮表示;(2)给节目支持人设置一个控制开关,用来控制系统的清零和抢答的开始;(3)抢答器具有数据锁存功能,显示功能和声音提示功能,抢答开始后,若有选手按抢答按钮,编号立即锁存,并在LED数码管上显示选手的编号,同时灯亮且伴随有声音提示。
此外,要封锁输入电路,禁止其他选手抢答,最后抢答选手的编号一直保存到主持人将系统清零。
2.基于DS1302电子时钟的设计基本要求:采用DS1302设计电子时钟,时,分,秒可以通过按键进行调整,并可以显示出实时时间。
3.基于DS18B20测温系统的设计基本要求:采用DS18B20设计测温系统,温度的上、下限可以通过按键进行设置,并可以显示出实时温度。
若温度不在设定的范围内,自动报警。
4.简易计算器的设计基本要求:(1)计算器至少能正常显示8位数;(2)开机时,显示0;(3)计算器能对整数进行简单的加、减、乘、除四则运算,在做除法时只取到小数部分的后2位;(4)运算结果超过可显示的位数时能运行出错提示。
5.简易电子琴设计基本要求:利用所给键盘的1,2,3,4,5,6,7,8八个按键,能够发出8个不同的音调,并且要求按下按键发声,松开延时一段时间停止,中间再按别的按键则发另一音调的声音。
6.直流电机调速及测速系统的设计基本要求:利用单片机对直流电机的速度进行调节,并借助测速传感器对电机的转速进行测试,并要求每3秒将直流电机的转速显示出来。
7.基于AT89S52单片机与上位机通信系统的设计基本要求:AT89S52单片机与上位机之间可以正确地进行数据传送,且上位机(电脑)的控制按钮可以控制下位机(单片机)8个发光二极管的亮与灭。
8.基于AT24C04电子密码锁的设计基本要求:将设定好的密码存于芯片AT24C04,在矩阵式键盘上输入密码进行解锁,每次输入的6位密码,会提示密码正确与否及输入密码的次数。
智能智能 高速高速 红外红外 球形摄像机使用说明智能高速红外球智能高速红外球形形摄像机摄像机使用说明使用说明一、产品概述产品概述1.1.高性能日夜转换功能高性能日夜转换功能高性能日夜转换功能摄像机摄像机摄像机机芯机芯机芯::本机采用的低照度摄像机具有日夜转换功能,摄像机实时监测被摄象景物照度,摄像机在低照度时自动转换为夜间红外模式,提高夜间感光监视能力;到白天自动转换为彩色模式。
2.2.采用最新的采用最新的DSP 优化算法优化算法::使用精密步进电机驱动,,使起动、制动快速平顺。
反应灵敏、定位准确、运转平稳、操控自如。
3.3.高效率高效率高效率红外红外LED 辅助光源辅助光源::本机装配了两组高效率红外LED 光源,采用隔离的光源仓和摄像机仓结构,保证了摄像机不被光源串扰。
内部集成自动调光电路, 平均功耗比非调光产品降低25%,平均寿命比非调光产品延长25%。
采用最新的调光软件,摄像机自动适应环境明暗和目标远近的变化,在低照度时自动转为夜间红外模式,同时开启红外LED 辅助光源。
自动调光:摄像机根据景物照度自适应调整红外LED 发光强弱,在0LUX 环境照度下,摄像机能清晰观察2米-100米范围内的景物。
手动调光:操作者可以手动调整红外LED 发光强弱,满足对特殊场景的摄象要求。
预置位记忆调光:操作者可以手动调整红外LED 发光强弱,通过保存预置位将此参数记忆在存储器中,用户可以保存227个这样的场景,已备随时调出清晰的图象。
4.4.具有掉电记忆功能具有掉电记忆功能具有掉电记忆功能::本产品可任意设置227个预置位和8个巡视组。
5.5.具有具有4防区自动报警定位追踪能力防区自动报警定位追踪能力::实现了真正意义上的全方位、全天候、高清晰、智能化监视。
6.6.便捷拨码便捷拨码便捷拨码::采用方便独特的外置拨码设置。
7.7.低功耗低功耗低功耗::满负载(含全方位云台、SONY 摄像机,大功率红外LED 光源)峰值电流3A。
摘要随着科技的不断发展,自动化程度的不断提高,自动门在人们日常生活中断得到了广泛的应用。
单片机SCM(Single Chip Microcomputer),即Micro Controller,是把微型计算机主要部分都集成在一个芯片上的单芯片微型计算机。
由于单片机系统的适应能力强,稳定性高,所以本设计采用AT89C51单片机作为主控制器。
本次设计是红外线自动门控制系统,使用红外线传感器作为感应器,检测到人体辐射的红外线能量变化,将其转化为电信号,传给单片机。
交流电机作为门驱动装置。
通过单片机控制交流电机,使门自动打开,当人进门后又可以使门自动关闭。
本课题主要实现红外线检测和基于AT89C51的单片机控制系统设计,是检测和控制相结合的测控课题。
关键词:单片机热释红外线传感器AT89C51 BISS0001AbstractWith the continuous development of science and technology, automatic door in People's Daily life interrupts a wide range of applications, and to its security and the properties of the demand is higher and higher. The automatic control system is as people living conditions for the pursuit of science and technology, the development of high-tech products. Arises because of the strong ability to SCM system .So this design uses AT89C51 single-chip microcomputer as the main controller.This design is infrared automatic control system, the use of infrared sensors as sensors, detection to human radiation of the infrared ray energy changed , turn it into electrical signals, to microcontroller. Put Ac motor as a door drive device. Through the single-chip microcomputer control ac motor, making the door automatically open, when people can make the door again after the door shut automatically. This subject mainly realizes infrared detection and control system based on AT89C51 single chip.Key words: thermal infrared sensors AT89C51 single chip interpretation BIS0001 chip.摘要 (I)Abstract ...................................................................................................... I I 第一章绪论 . (1)1.2 课题的意义和目的 (1)1.3 该设计的基本设计思路 (2)第二章方案论证 (4)2.1 调速控制方法及选择 (4)2.1.1 直流伺服电机与普通直流电机以及交流伺服电机的比较 (4)2.1.2 选用PWM调速系统控制直流伺服电机 (4)2.2 单片机的选择 (5)2.3 门控传感器的选择 (6)第三章主要器件的介绍 (7)3.1 热释红外传感器的原理和使用 (7)3.2 BISS0001芯片介绍和典型电路 (10)3.2.1 BISS0001的内部: (11)3.2.2 BISS0001的特点: (12)3.2.3 BISS001管脚图: (12)3.2.4 BISS001管脚说明: (13)3.2.5 BISS0001的参数: (14)3.2.6 BISS0001工作原理 (15)3.3 AT89C51单片机简介 (19)3.3.1 AT89C51主要特性: (21)3.3.2 AT89C51管脚说明: (22)3.3.3振荡器特性: (24)3.3.4芯片擦除: (24)3.4 菲涅尔透镜原理 (25)3.4.1 镜片主要有三种颜色: (26)3.4.2 菲涅尔透镜的主要技术指标 (27)3.5 步进电机 (27)3.5.1步进电动机有如下特点: (27)3.5.2反应式步进电机 (28)3.5.3 反应式步进电动机的步进原理 (29)3.5.4 驱动控制系统组成 (31)3.5.5 斩波驱动 (33)第四章系统硬件设计 (36)4.1 设计电路的电框图和原理 (36)4.1.1系统硬件总体逻辑设计 (37)4.2 设计电路原理图 (38)第五章系统软件设计 (40)5.1 系统软件结构 (40)5.2 各部分程序设计 (40)第六章调试 (46)6.1 初步检查 (46)6.2 为了确保该门控系统的安全高效运行必须满足下列条件:466.3 自动化性能测试 (46)第七章设计总结 (47)致谢 (50)第一章绪论1.1 课题研究的可行性现如今自动化、信息化程度越来越高,单片机的应用领域也就越来越广,成为人们生活不可或缺的一部分。
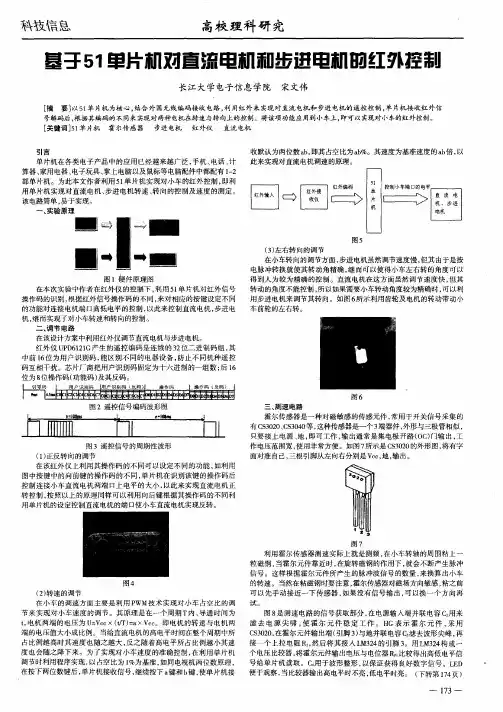
收稿日期:2012-02-13*陕西省教育厅项目资助(项目编号:11JK0934)一种红外遥控式步进电机控制器的设计与实现令朝霞(陕西理工学院电气工程学院,陕西汉中723003)摘要:介绍了以89C2051单片机为核心,针对步进电机在手动和自动控制模式的基础上,设计出能够实现遥控操作的控制器。
以四相五线步进电机为研究对象,以集成红外接收器接收遥控器发来的信号作为输入信号,并送单片机进行解码,单片机根据接收的输入信号进行运算处理后,发出控制命令送步进驱动器,驱动步进电机工作。
实现了步进电机的手动、自动及遥控方式下的正反转,还实现定时时钟控制以及LCD 状态显示等功能。
关键词:步进电机;自动控制;手动;遥控Designed and realized of a kind of stepping motor controller based on infrared remote control typeLING Zhao-xia(School of Electricity Engineering of Shaanxi University of Technology ,Hanzhong 723003,China)Abstract:Introduced the 89C2051microcontroller as the core ,in view of the stepping motor in the manual and automatic control mode on the basis.It was designed thecontroller of realized remote operation.For research object of four phase five line stepping motor ,the integrated infrared receiver receive from the remote control of the signal ,and send MCU as input signal decoding ,SCM according to receive the input signal to operational treatment ,a control orders to send stepping drive ,drive stepping motor.Not only the motor is realized positive rotation and negative rotation by the manual ,automatic and remote control ,still is realized the clock control ,as well as LCD status demonstration function.The system was designed safe reliable and can be realized easily ,the programming simply easy to understand able.Keywords:stepping motor ;automatic control ;manual ;remote control步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
本科生毕业设计(论文)论文题目:基于单片机的红外遥控系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:本设计是基于单片机的红外遥控系统设计,设计内容包括了红外接收,红外解码和步进电机控制三大块。
如今红外遥控技术已经得到了广泛的应用;其利用红外线来传输数据,这种情况下不需要实体连线,体积小,成本低,功能强。
我们日常生活中的电视机,洗衣机,空调,航天飞机,工业现场设备等都运用了红外遥控的技术。
本设计中发射端采用专用的发射芯片来实现红外遥控码的发射,且遥控码格式是NEC标准。
接收端采用市面上流行的1838一体化红外接收头,接收到的红外信号经由1838接收头完成光/电转化和解调的工作,然后把33位的完整码发送到解码芯片中去完成解码工作。
本设计中的主芯片是STC89C52单片机,主芯片和解码芯片之间进行串行通讯。
系统启动后,解码芯片将解码后得到的8位数据码串行发送到主芯片中,然后通过主芯片来控制步进电机的正转,反转,加速,减速。
本设计中的被控对象是步进电机,步进电机最适合做数字控制。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。

步进电机工作原理
步进电机是一种控制精度较高的电机,它的工作原理是通过对电机的电流进行精确控制来实现旋转。
步进电机通常由一个固定的磁体和一个旋转的转子组成。
固定磁体中有若干个磁极,而转子上也有相应的磁极。
这些磁极的排列方式决定了电机的工作方式。
步进电机的转动是通过改变电流的方向和大小来实现的。
当电流通过固定磁体时,会产生一个磁场,这个磁场会与转子上的磁场相互作用,从而使得转子旋转到一个新的位置。
当电流的方向和大小改变时,转子也会相应地改变位置。
为了精确定位,步进电机通常会将转子分为几个等距的位置,每个位置都与一个特定的电流模式相对应。
通过改变电流的方式,可以使转子逐步移动到下一个位置,从而实现精确的旋转。
步进电机的转子移动是离散的,而不是连续的。
这意味着它可以精确定位,并且不需要使用传统的位置反馈设备来监测转子的位置。
步进电机适用于需要精确控制和定位的应用,如打印机、数控机床和机器人等。
总之,步进电机通过精确控制电流来实现转子的旋转,从而实现精确的位置控制。
它的工作原理基于磁场的相互作用,使得转子可以按照离散的步进来旋转。
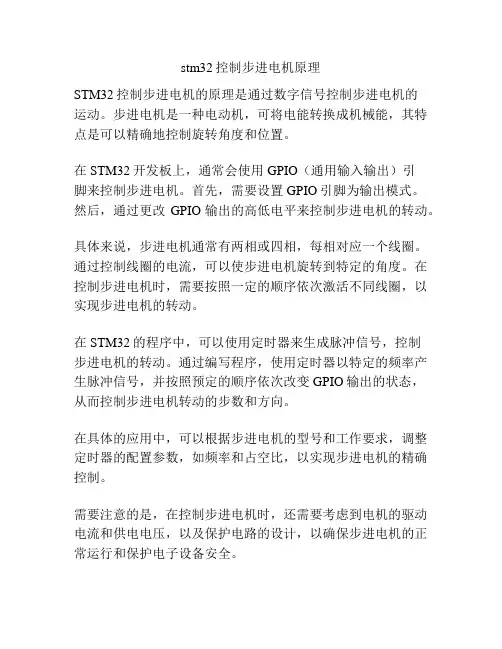
stm32控制步进电机原理
STM32控制步进电机的原理是通过数字信号控制步进电机的
运动。
步进电机是一种电动机,可将电能转换成机械能,其特点是可以精确地控制旋转角度和位置。
在STM32开发板上,通常会使用GPIO(通用输入输出)引
脚来控制步进电机。
首先,需要设置GPIO引脚为输出模式。
然后,通过更改GPIO输出的高低电平来控制步进电机的转动。
具体来说,步进电机通常有两相或四相,每相对应一个线圈。
通过控制线圈的电流,可以使步进电机旋转到特定的角度。
在控制步进电机时,需要按照一定的顺序依次激活不同线圈,以实现步进电机的转动。
在STM32的程序中,可以使用定时器来生成脉冲信号,控制
步进电机的转动。
通过编写程序,使用定时器以特定的频率产生脉冲信号,并按照预定的顺序依次改变GPIO输出的状态,
从而控制步进电机转动的步数和方向。
在具体的应用中,可以根据步进电机的型号和工作要求,调整定时器的配置参数,如频率和占空比,以实现步进电机的精确控制。
需要注意的是,在控制步进电机时,还需要考虑到电机的驱动电流和供电电压,以及保护电路的设计,以确保步进电机的正常运行和保护电子设备安全。
总结起来,STM32控制步进电机的原理是通过数字信号控制步进电机的运动,使用GPIO引脚和定时器生成脉冲信号,依次改变线圈的电流激活顺序,从而控制步进电机的转动。
文章标题:基于51单片机的步进电机红外控制系统的设计引言在现代科技发展迅速的时代,控制系统已经被广泛应用于各个领域。
其中,基于51单片机的步进电机红外控制系统的设计,不仅在工业领域有着重要的作用,同时也在家电领域、智能家居等方面得到了广泛的应用。
本文将从步进电机控制系统的设计原理、红外控制的基本概念以及基于51单片机的系统设计方案等方面展开深入探讨。
一、步进电机控制系统的设计原理步进电机是一种将电脉冲信号转换为机械位移的执行元件,其控制系统设计原理是核心。
以步进电机为执行元件的控制系统通常包括电脉冲发生电路、电流驱动电路、位置控制逻辑电路以及接口电路等模块。
在系统设计中,需要考虑步进电机的类型、工作方式、转动角度以及控制精度等因素,以选择合适的控制方案和相关元器件。
针对步进电机的控制系统设计,首先需要从硬件电路和软件控制两个方面进行综合考虑。
硬件方面需要设计合适的脉冲发生电路和驱动电路,并根据具体场景考虑相关的接口电路,以实现步进电机的控制和驱动。
而软件控制方面,则需要编写相应的控制程序,使得系统能够根据具体的控制要求进行精准的控制和调节。
二、红外控制的基本概念红外控制是一种常见的无线遥控技术,通过使用红外线传输信号来实现对设备的控制。
通常包括红外发射器和红外接收器两个部分,发射器将控制信号转换成红外信号发送出去,接收器接收红外信号并将其转换成电信号进行处理。
在实际应用中,红外控制技术已经被广泛应用于各种家电遥控器、智能家居系统以及工业自动化领域。
红外控制的基本原理是在发射器和接收器之间通过红外线进行双向通信,通过调制解调的方式进行信号的传输和解析。
设计基于红外控制的步进电机系统需要考虑红外信号的发射和接收过程,以及相关的解析算法和信号处理。
信号的稳定性、抗干扰能力以及传输距离等也是需要考虑的重要因素。
三、基于51单片机的系统设计方案在步进电机红外控制系统的设计中,选择合适的控制芯片和处理器是至关重要的。
项目名称:基于STC89C52单片机红外遥控步进电机一、摘要>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>二、关键词>>>>>>>>>>>>>>>>>>>>>>>>>>>>>三、STC89S52概述>>>>>>>>>>>>>>>>>>>>>>1.概述>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>2.主要性能>>>>>>>>>>>>>>>>>>>>>>>>>>3.单片机引脚分布图>>>>>>>>>>>>>>>>>>>四、功能描述及分析>>>>>>>>>>>>>>>>>>>>>>五、软件描述>>>>>>>>>>>>>>>>>>>>>>>>>>>1.程序流程图>>>>>>>>>>>>>>>>>>>>>>>>2.判断编码电平流程图>>>>>>>>>>>>>>>>>六、操作说明>>>>>>>>>>>>>>>>>>>>>>>>>>>七、实施步骤>>>>>>>>>>>>>>>>>>>>>>>>>>>1.步骤>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>2.PCB制作流程>>>>>>>>>>>>>>>>>>>>>>>3.原理图及电路分析>>>>>>>>>>>>>>>>>>>>八、项目制作原件清单>>>>>>>>>>>>>>>>>>>>九、项目程序>>>>>>>>>>>>>>>>>>>>>>>>>>>>十、毕业作品实物照>>>>>>>>>>>>>>>>>>>>>>> 十一、毕业设计总结>>>>>>>>>>>>>>>>>>>>>>>一、摘要随着我国工业化、信息化进程的高速发展,电子信息产业蓬勃发展,国内对单片机及其外围设备研究越来越深入,实用也越来越广泛。
步进电机控制系统设计目录1绪论 (3)1.1 步进电机概述 (3)1.2 步进电机的特征 (3)1.3 步进电机驱动系统概述 (4)1.4 课题研究的主要内容 (4)2步进电机驱动系统的方案论证 (5)2.1 步进电机驱动系统简介 (5)2.2 步进电机驱动器的特点 (5)2.3 混合式步进电机的驱动电路分类和性能比较 (6)2.3.1 双极性驱动器与单极性驱动器 (6)2.3.2 单电压驱动方式 (8)2.3.3 高低压驱动方式 (9)2.3.4 斩波恒流驱动 (10)2.4 方案的确定 (10)3混合式步进电动机驱动控制系统硬件设计 (11)3.1单片机最小系统 (11)3.2 红外遥控电路 (12)3.2.1 红外发射电路 (12)3.2.2 红外接收电路 (13)3.3 LCD显示电路 (14)3.4 双机通讯 (15)3.5 步进电机驱动部分 (16)3.5.1 单极性步进电机驱动 (16)3.5.2 双极性步进电机驱动 (18)3.6 电源电路 (18)4 软件设计 (19)4.1 主机LCD显示菜单程序 (19)4.2 双机通讯程序 (20)4.3 下位机步进电机驱动程序 (22)5 驱动器试验结果 (24)5.1 概述 (24)5.2 试验内容和结论 (24)总结 (26)参考文献 (27)1绪论1.1 步进电机概述步进电机是将电脉冲信号转换为角位移或线性运动的执行器。
它由步进电机及其动力驱动装置组成,形成开环定位运动系统。
当步进驱动器接收到脉冲信号时,它驱动步进电机以设定方向以固定角度(步进角度)旋转。
脉冲输入越多,电机旋转的角度越大;输入脉冲的频率越高,电机的速度越快。
因此,可以通过控制脉冲数来控制角位移,从而达到精确定位的目的;同时,通过控制脉冲频率可以控制电机转速,从而达到调速的目的。
根据自身结构,步进电机可分为三类:反应型(VR),永磁型(PM)和混合型(HB)。
混合式步进电机具有无功和永磁两种优点,应用越来越广泛。
基于单片机的红外电子密码锁的设计基于单片机的红外电子密码锁的设计随着科技的发展,红外电子密码锁逐渐取代传统的机械密码锁成为了门禁系统中的主流。
红外电子密码锁通过红外线传输数据,使得开锁变得更加智能化、快速化,而且提高了安全性,防止了密码泄露以及密码碰撞的问题。
本文将介绍一种基于单片机的红外电子密码锁的设计方案。
一、系统方案本设计采用C51单片机为控制器,红外线信号接收模块作为主控,驱动步进电机控制门锁的开关,使得门的开关更加方便快捷,并提高了安全性。
电路运用了ISP编程器,通过USB 接口与电脑连接,并通过Keil软件编写程序上传到控制器中,以控制系统的整体运行流程。
二、硬件设计1. 单片机选型本设计中,选用51系列单片机控制器Atmel AT89C51,其具有内部FLASH可编程存储器,可在编程过程中对程序进行修改,更加便于控制器程序的更新维护。
同时,该单片机具有多种外设接口,包括计数器、定时器、串口等,便于实现控制器与各种传感器、执行器的互联。
2. 电源设计本系统使用直流12V供电,其中12V正极接单片机VCC,负极接GND,同时将12V作为步进电机的电源。
在电路中使用L7805稳压电源,将电压稳定输出为5V供给单片机芯片和红外线传感器等其他模块。
3. 红外线接收模块在门锁上方适当放置一个2150nm红外线传感器模块,以接收红外线信号并将其转化为数字信号。
这里采用的是RS232接口连接,将红外二极管所收到的红外线信号交给MCU进行处理。
4. 步进电机为实现门的自动开启关闭,本设计采用了步进电机驱动门锁的开关。
步进电机与单片机控制器的连接采用的是四线步进电机驱动电路。
其中,两根草绿色和橙色的线为电机的控制线,将其接入单片机P3口中,蓝色和红色的两根线分别为电机的两个电极,将它们接到电机驱动器的两个对应通道上。
三、软件设计1. 开发环境本设计所需的IDE使用Keil 4.0集成开发工具,同时也需要用到AT89C51单片机的ISP编程器,将程序下载到MCU板上。
项目2 智慧家居系统一、实验目的1.了解智慧家居市场需求和技术架构。
2.掌握智慧家居软硬件系统的选型、设计和应用。
3.掌握基于智云平台完成智慧家居系统的软硬件设计。
二、实验环境硬件环境:PC机Pentium处理器双核2GHz以上,内存4GB以上操作系统:Windows7 64位及以上操作系统开发软件:IAR Embedded Workbench for 8051/ARM(IAR嵌入式8051/ARM集成开发环境)、Visual Studio Code(Web 集成开发环境)、Node.js(14及以上版本)、Chrome 浏览器实验器材:物联网工程实训平台实验配件:SmartRF04EB仿真器、Jlink ARM仿真器、Mini USB线、12V电源三、实验内容1.实验原理1.1 需求分析智慧家居是以住宅为平台,集系统、结构、服务、管理、控制于一体,利用先进的网络通信技术、计算机技术,将与居家生活有关的各种设备有机地结合起来,通过网络化的综合管理家中设备,来创造一个优质、高效、舒适、安全、便利、节能、健康、环保的居住生活环境空间,智能家居的主要功能有功能有:1)环境监测:实现家居内各种环境信息的采集和监测,包括:温湿度、光照度、空气质量,并可基于相关数据联动电器设备实现智能化的环境调节。
2)控制管理:利用计算机接入Internet,并对灯具、窗帘、净化器、空调、冰箱等家用电器进行远程控制、自动控制。
3)安防管理:包括各种报警探测器的信息采集,开关门报警等如窗磁门磁、红外探测、氨气探测、火焰探测等,并完成实时报警功能。
1.2 设计目标智慧家居系统综合设计功能及目标如下:智慧家居系统光照度、空气质量环境数据采集信号灯、插座、继电器组、步进电机、遥控智能控制氨气、火焰、门磁窗磁、IP摄像头、人体红外、门禁系统安防预警)基础功能是对智慧家居系统光照强度、空气质量等数据进行实时采集并通过图表等形式表现出)智慧家居系统信号灯、智能插座、继电器组、步进电机、红外遥控控制。
摘要本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位,并能显示小车停止的时间。
本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。
自动寻迹的功能采用红外对管LTH1550实现,信号经三极管9012放大,经LM339电压比较器比较之后将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。
同时还可以将小车的停留时间通过四位数码管显示。
关键词:STC89C51单片机;红外对管LTH1550;红外传感器;寻迹一、系统设计任务与要求小车从上坡处开始行驶,到达坡顶停留5秒,由数码管显示停留时间,然后继续行驶,到达坡底开始沿黑线行驶,直到终点宽黑线停止。
二、方案分析与论证总体方案设计:根据题目,我们设计了以下方案并进行了综合的比较论证,自动寻迹电动小车系统由小车主体部分、微控制器模块、寻迹传感器模块、电机驱动模块、显示模块、电源模块构成。
2.1 总体方案论证与比较方案一:采用数字电路来组成小车的各部分系统,实现各部分功能。
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,设计困难。
方案二:采用单片机来作为整机的控制单元。
黑线检测采用红外对管对光源信号进行采集,再经过三极管放大,电压比较使输出转化为数字信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。
方案二的基本结构图如下:图1总体系统结构框图2.2 寻迹检测方案的选择方案一:采用CCD传感器。
利用CCD传感器进行自动导航的机器人已得到初步应用。
但CCD传感器价格较高,体积较大,数据处理复杂,不适合本次实验使用。
基于红外遥控步进电机的设计班级:B140415摘要:随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
介绍了一种基于AT89C51单片机的红外遥控步进电机的设计,系统分为红外遥控编解码、LCD显示和驱动步进电机三个模块,设计的系统能通过遥控器来控制步进电机,并且步进电机的状态能通过LCD液晶模块实时显示出来,使人们直观的看出步进电机的运行状态。
本报告对该系统的工作原理、硬件电路和软件进行了详细介绍。
关键词:红外遥控、LCD显示、步进电机、单片机一、引言本系统是基于单片机控制的综合系统,单片机通过对红外信号的解码来实现步进电机的变速及LCD实时显示步进电机的转速。
它综合了电子技术和单片机软硬件技术,本设计采用AT89c51单片机为核心包含红外接收电路、LCD显示电路和步进电机驱动电路。
通过红外遥控器发射不同的码值来控制步进电机的正转反转、加速减速以及启动停止并通过LCD显示出步进电机的状态。
二、系统功能分析根据系统要求设计各个模块。
本设计中控制芯片采用AT89c51单片机,各个功能通过不同模块来得以实现,主要有:红外接收模块、步进电机驱动和LCD显示模块。
系统基本架构原理如图1所示图一基本架构原理图各个模块具体实现方式如下:1. 红外发射模块:本设计采用的是通过遥控器发射不同的码值,红外接收电路将接收到得信号送给单片机的外部中断0,单片机接收到信号后通过解码程序对接收到得信号进行处理,使得这些信号成为相应的码值。
基于红外遥控步进电机的设计红外遥控步进电机是一种使用红外遥控技术控制的步进电机。
步进电机是一种具有精确步进角度和良好定位特性的电机,它被广泛应用于机械、电子和自动化系统中。
红外遥控步进电机的设计主要包括以下几个方面:1.红外解码模块设计:红外解码模块用于接收红外遥控信号并解码得到相应的命令。
设计中需要考虑红外传感器的灵敏度和接收频率范围,以确保能够正确地接收和解码红外信号。
2.电机驱动电路设计:电机驱动电路用于控制步进电机的运动。
设计中应考虑步进电机的相序控制和驱动电流控制,以确保能够精确地控制步进电机的步进角度和运动速度。
3.控制电路设计:控制电路用于接收解码后的红外信号,并将其与电机驱动电路连接起来。
设计中需要考虑控制电路与红外解码模块和电机驱动电路的接口和通信协议,以确保能够准确地控制电机的运动。
4.电源电路设计:电源电路用于为红外解码模块、电机驱动电路和控制电路提供稳定的电源供应。
设计中需要考虑电源电路的稳定性和输出电流和电压的需求,以确保能够正常地供电给整个系统。
5.外壳和机械结构设计:外壳和机械结构设计主要考虑电机的安装和固定。
设计中需要考虑电机的尺寸、重量和固定方式,以确保能够有效地安装和固定电机。
在实际应用中,红外遥控步进电机可以应用于各种场景,如智能家居中的电动窗帘、电动门禁等。
通过红外遥控技术,用户可以远程控制电动装置的运动,实现自动化操作。
总结起来,基于红外遥控的步进电机设计主要包括红外解码模块设计、电机驱动电路设计、控制电路设计、电源电路设计和外壳和机械结构设计等方面。
通过这些设计,可以实现对电机的远程控制,为各种应用场景提供自动化控制的解决方案。
红外遥控步进电机控制器设计
组长:蒋世良组员:赖华生、金潇威
一、主要实现的功能
本设计基于51系列单片机,采用一体化红外接收头,控制器收遥控器信号,控制步进电机的启动、停止、正常正转、正常反转、高速正转、高速反转、低速正转、低速反转,并将接受的数据显示在LCD1602上,转动时,无论正转还是反转,2圈后都停止。
二、电路图
三、主要器件介绍
3.1液晶显示
3.1.1 1602字符型LCD简介
字符型液晶显示模块是一种专门用于显示字母、数字、符号等点阵式LCD,目前常用16*1,16*2,20*2和40*2行等的模块。
下面以长沙太阳人电子有限公司的1602字符型液晶显示器为例,介绍其用法。
一般1602字符型液晶显示器实物如图3-1:
图3-1 1602字符型液晶显示器实物图
3.1.2 1602LCD的基本参数及引脚功能
1602LCD分为带背光和不带背光两种,基控制器大部分为HD44780,带背光的比不带背光的厚,是否带背光在应用中并无差别,两者尺寸差别如下图3-2所示:
图3-2 1602LCD尺寸图
3.1.3 1602LCD主要技术参数:
显示容量:16×2个字符
芯片工作电压:4.5—5.5V
工作电流:2.0mA(5.0V)
模块最佳工作电压:5.0V
字符尺寸:2.95×4.35(W×H)mm
3.1.4引脚功能说明
1602LCD采用标准的14脚(无背光)或16脚(带背光)接口,各引脚接口说明如表3-1所示:
表3-1:引脚接口说明表
第1脚:VSS为地电源。
第2脚:VDD接5V正电源。
第3脚:VL为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度。
第4脚:RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
第5脚:R/W为读写信号线,高电平时进行读操作,低电平时进行写操作。
当RS和R/W共同为低电平时可以写入指令或者显示地址,当RS为低电平R/W为高电平时可以读忙信号,当RS为高电平R/W为低电平时可以写入数据。
第6脚:E端为使能端,当E端由高电平跳变成低电平时,液晶模块执行命令。
第7~14脚:D0~D7为8位双向数据线。
第15脚:背光源正极。
第16脚:背光源负极。
3.1.5 1602LCD的指令说明及时序
1602液晶模块内部的控制器共有11条控制指令,如表3-2所示:
表3-2:控制命令表
1602液晶模块的读写操作、屏幕和光标的操作都是通过指令编程来实现的。
(说明:1为高电平、0为低电平)
指令1:清显示,指令码01H,光标复位到地址00H位置。
指令2:光标复位,光标返回到地址00H。
指令3:光标和显示模式设置 I/D:光标移动方向,高电平右移,低电平左移 S:屏幕上所有文字是否左移或者右移。
高电平表示有效,低电平则无效。
指令4:显示开关控制。
D:控制整体显示的开与关,高电平表示开显示,低电平表示关显示 C:控制光标的开与关,高电平表示有光
标,低电平表示无光标 B:控制光标是否闪烁,高电平闪烁,低电平不闪烁。
指令5:光标或显示移位 S/C:高电平时移动显示的文字,低电平时移动光标。
指令6:功能设置命令 DL:高电平时为4位总线,低电平时为8位总线 N:低电平时为单行显示,高电平时双行显示 F: 低电平时显示5x7的点阵字符,高电平时显示5x10的点阵字符。
指令7:字符发生器RAM地址设置。
指令8:DDRAM地址设置。
指令9:读忙信号和光标地址 BF:为忙标志位,高电平表示忙,此时模块不能接收命令或者数据,如果为低电平表示不忙。
指令10:写数据。
指令11:读数据。
3.1.6与HD44780相兼容的芯片时序表如下3-3:
表3-3:基本操作时序表读写操作时序如图3-3和3-4所示:
图3-3 读操作时序
图3-4 写操作时序
3.1.7 1602LCD的RAM地址映射及标准字库表
液晶显示模块是一个慢显示器件,所以在执行每条指令之前一定要确认模块的忙标志为低电平,表示不忙,否则此指令失效。
要显示字符时要先输入显示字符地址,也就是告诉模块在哪里显示字符,图3-5是1602的内部显示地址。
图3-5 1602LCD内部显示地址
例如第二行第一个字符的地址是40H,那么是否直接写入40H就可以将光标定位在第二行第一个字符的位置呢?这样不行,因为写入显示地址时要求最高位D7恒定为高电平1所以实际写入的数据应该是01000000B(40H)+10000000B(80H)=11000000B(C0H)。
在对液晶模块的初始化中要先设置其显示模式,在液晶模块显示字符时光标是自动右移的,无需人工干预。
每次输入指令前都要判断液晶模块是否处于忙的状态。
1602液晶模块内部的字符发生存储器(CGROM)已经存储了160个不同的点阵字符图形,如图3-5所示,这些字符有:阿拉伯数字、英文字母的大小写、常用的符号、和日文假名等,每一个字符都有一个固定的代码,比如大写的英文字母“A”的代码是01000001B(41H),显示时模块把地址41H中的点阵字符图形显示出来,我们就能看到字母“A”
3.1.8 1602LCD的一般初始化(复位)过程
延时15mS
写指令38H(不检测忙信号)
延时5mS
写指令38H(不检测忙信号)
延时5mS
写指令38H(不检测忙信号)
以后每次写指令、读/写数据操作均需要检测忙信号
写指令38H:显示模式设置
写指令08H:显示关闭
写指令01H:显示清屏
写指令06H:显示光标移动设置
写指令0CH:显示开及光标设置
3.2 红外线模块
红外通信具有控制简单、实施方便、传输可靠性高的特点,是一种较为常用的通信方式。
实现单片机系统红外通信的关键在于红外接口电路的设计以及接口驱动程序的设计。
3.2.1红外通信的基本原理
红外通信是利用950nm近红外波段的红外线作为传递信息的媒体,即通信信道。
发送端采用脉冲相位调制(PPM)方式,将二进制数字信号调制成某一频率的脉冲序列,并驱动红外发射管以光脉冲的形式发送出去;接收端将接收到的光脉转换成电信号,再经过放大、滤波等处理后送给解调电路进行解调,还原为二进制数字信号后输出。
3.2.2红外发送器
红外发送器电路包括脉冲振荡器、驱动管Q1和Q2、红外发射管Q3等部分。
其中脉冲振荡器由2206组成,用以产生38kHz的脉冲序列作为载波信号;红外发射管Q3用来向外发射950nm的红外光束。
红外发送器的工作原理为:串行数据由单片机的串行输出端DATA 送出并驱动Q1管,数位“0”使Q1管导通,通过Q2管调制成38kHz 的载波信号,并利用红外发射管Q3以光脉冲的形式向外发送。
数位“1”使Q1管截止,红外发射管Q3不发射红外光。
若传送的波特率设为1200bps,则每个数位“0”对应32个载波脉冲调制信号的时序,
如图3-6所示。
3-6 调制信号时序图
3.2.3红外接收器
红外接收电路选用专用红外接收模块。
该接收模块是一个三端元件,使用单电源+5V电源,具有功耗低、抗干扰能力强、输入灵敏度高、对其它波长(950nm以外)的红外光不敏感的特点,其内部结构框图如图3-7所示。
3-7红外接收模块内部结构框图接收模块的工作原理为:首先,通过红外光敏元件将接收到的载波频率为38kHz的脉冲调制红外光信号转化为电信号,再由前置放大器和自动增益控制电路进行放大处理。
然后,通过带通滤波器和进行滤波,滤波后的信号由解调电路进行解调。
最后,由输出级电路进行反向放大输出。
红外接收头接收后的数据刚好是跟发送相反,引导码是9ms低电平加4.5ms的高电平
接下来是8位客户码和8位客户码的反码,再接下来就是8位数据码和八位数据码的反码
“0”是0.56ms 的低电平和0.56ms的高电平表示
“1”是0.56ms 的低电平和1.69ms的高电平表示
先接收低位后高位
四、软件流程图
4.1 主流程图
4.2 红外线接受模块流程图
五、测试结果
1.测试结果图
图5-1单片机上电欢迎语
图5-2 启动状态
图5-3匀速正转
图5-4 匀速反转
图5-5 高速正转
图5-6 高速反转
图5-7 低速正转
图5-8 低速反转
图5-9 停止。