限位控制和自动往复循环控制线路及检查试车(精)
- 格式:ppt
- 大小:101.50 KB
- 文档页数:10
三相异步电动机的限位控制实训指导书
一、实训目的
1、掌握实现三相异步电动机限位控制的方法。
2、熟悉常见低压电器。
3、培养电气线路安装操作能力
二、实训设备和元器件
1、电动机控制线路接线模拟板1块;
2、常用电工工具1套;
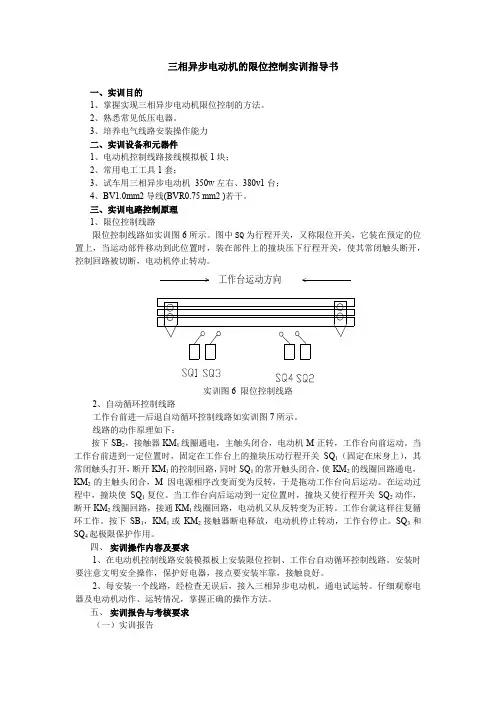
线路的动作原理如下:
按下SB2,接触器KM1线圈通电,主触头闭合,电动机M正转,工作台向前运动。
当工作台前进到一定位置时,固定在工作台上的撞块压动行程开关SQ1(固定在床身上),其常闭触头打开,断开KM1的控制回路,同时SQ1的常开触头闭合,使KM2的线圈回路通电,KM2的主触头闭合,M因电源相序改变而变为反转,于是拖动工作台向后运动。
在运动过程中,撞块使SQ1复位。
当工作台向后运动到一定位置时,撞块又使行程开关SQ2动作,断开KM2线圈回路,接通KM1线圈回路,电动机又从反转变为正转。
工作台就这样往复循环工作。
按下SB1,KM1或KM2接触器断电释放,电动机停止转动,工作台停止。
SQ3和SQ4起极限保护作用。
四、实训操作内容及要求
1、在电动机控制线路安装模拟板上安装限位控制、工作台自动循环控制线路。
安装时要注意文明安全操作,保护好电器,接点要安装牢靠,接触良好。
2、每安装一个线路,经检查无误后,接入三相异步电动机,通电试运转。
仔细观察电器及电动机动作、运转情况,掌握正确的操作方法。
五、实训报告与考核要求
(一)实训报告
1、画出限位控制和工作台自动循环控制线路,并分析线路工作原理。
2、设计一个带点动的限位控制电路。
2007.11.5~11.9技师电419课题四自动往复循环控制线路1、正确掌握自动往复循环控制线路的工作原理;2、正确进行自动往复循环控制线路装配。
德育目标:1、引导学生逐渐树立较强的质量意识。
2、引导学生逐渐养成勤俭节约的良好作风。
自动往复循环控制线路的工作原理自动往复循环控制线路的装配教学方法:讲解法、演示法、现场实习法课日一:自动往复循环控制线路的介绍课日授课日期:2007.11.5课日教学目的:1、了解自动往复循环控制线路的组成;2、熟练掌握位置开关的工作原理。
课日教学过程:一、组织教学1、检查学生出席情况及劳动保护穿戴情况;2、调动学生参与教学的积极性;3、随时注意实习课堂动向,控制好教学秩序。
二、复习旧课1、复习常用低压电器种类、名称、符号、使用方法及维修。
三、讲授新课1、位置开关和位置控制位置开关是一种将机械信号转换为电气信号,以控制运动部件位置或行程的自动控制电器。
而位置控制就是利用生产机械运动部件上的挡铁与位置开关碰撞,使其触头动作,来接通或断开电路,以实现对生产机械运动部件的位置或行程的自动控制。
2、行程开关行程开关是用以反映工作机械的行程,发出命令以控制其运动方向和行程大小的开关。
3、自动往复循环控制线路的组成KM1、KM2为正反转接触器,SB1、SB2为正反启动按钮,SB3为停车按钮,SQ1、SQ2为限位开关,FU1、FU2作短路保护。
四、安全注意事项1、集体背诵安全操作规程;2、注意两人上岗,其中一人负责安全。
五、巡回指导1、对学生的接线进行检查指导;2、对学生的排故障操作进行指导;3、对学生排故障技巧进行指导。
QS FU2课日小结总结本课日的完成情况,劳动态度和劳动纪律情况,安全及文明生产等情况。
指出存在的问题及改进措施。
课日二:自动往复循环控制线路的工作原理课日授课日期:2007.11.6课日教学目的:1、掌握自动往复循环转控制线路的工作原理;2、正确进行自动往复循环控制线路装配。
电工实习报告--鼠笼式异步电动机的正反转控制电工实习报告姓名:高雪珍班级:11自动化1班学号:2011551603指导老师:李辉鼠笼式异步电动机的正反转控制一、实验目的1(了解交流接触器、热继电器和按钮等几种常用控制电器的结构,并熟悉它们的联接方法。
2(通过实验操作,加深理解鼠笼式电动机直接启动控制线路的工作原理及各环节的作用。
3(了解复式按钮的结构、联接方法及其所起的作用,通过实验加深理解鼠笼式电动机正反转控制线路的工作原理,明确控制线路中两个接触器联锁的必要性。
4(了解行程开关的工作原理及其在控制电路中所起的作用,并用行程开关设计行程控制和自动循环控制。
二、实验仪器与设备1(三相交流电源一个2(三相鼠笼式异步电动机一台3(交流接触器两个4(热继电器一个(按钮三个 56(万用表一块三、预习要求1(了解三相异步电动机铭牌数据的意义。
2(了解几种常用控制电器的结构、用途和工作原理。
3(复习鼠笼式三相异步电动机直接启动控制电路的工作原理,并理解自锁及点动的概念,以及短路保护、过载保护和零压保护的概念。
4(复习三相鼠笼式异步电动机正反转控制线路的工作原理,弄清实现正反转时各控制元件动作过程。
为什么必须保证两个接触器不能同时工作,采取什么措施可以解决这一问题,5(复习行程开关和通电延时的时间继电器的工作原理,并独立设计行程控制和时间控制的实验控制线路图。
四、实验内容与步骤1. 三相鼠笼式异步电动机的直接起动控制图1 直接起动控制电路在切断电源的情况下,按图 1 接线。
通常先用粗线接好主电路,然后再用细线接控制电路,并且按“先接串联电路、后接并联电路”的方法进行接线。
要求在任一联接点上不超过两根导线,以保证接线的牢靠、安全。
线路接好后,仍按先主电路后控制电路的顺序依次检查。
对所接线路的检查核对也可用万用表在不带电的情况下,通过各触点闭合或断开时电路阻值的变化来判断,同学可按自行拟定的检查程序进行检查。
在确认所接线路正确无误后,便可通电进行控制操作。
自动往复循环控制-行程控制小车往复运动的前进、后退的自动控制和电动机的自动往复循环控制,内容:1.手动控制:前面介绍的异步电动机起动、停止和正反转控制都是由人通过按钮发布命令的。
2.开关自动控制:在现代生产中,常用一些能自动发布命令的开关来实施各种自动控制。
3.开关自动控制种类:通过把不同的物理量转换为开关命令。
①行程控制②时间控制③速度控制④压力控制行程控制:当运动部件到达一定行程位置时采用行程开关来控制其运行状况。
生产中由于工艺和安全的要求,常常需要控制某些机械的行程和位置。
例如,龙门刨床的工作台要求进行往复运动加工产品,在工作台达到极限位置时,必须自动停下来。
像这一类的行程控制可以利用行程开关来实现。
实例--龙门刨床自动往返控制线路之元器件介绍行程控制通常用行程开关来实现。
外形图(一)行程开关1、什么是行程开关?行程开关又称位置开关或限位开关,是根据运动部件位移来切换电路的一种自动电器,能实现运动部件极限位置的保护。
可将机械信号转换为电信号,以实现对机械运动的控制。
2、行程开关结构和分类主要由触头系统、操作机构和外壳组成。
按其结构可分为直动式、滚轮式和微动式三种。
行程开关动作后,复位方式有自动复位和非自动复位两种。
LXK3-20H/L行程开关(滚轮柱塞式自动复位)柱塞式行程开关LX19-001 高银点/厚铝壳能自动复位一开一闭以直动式为例其工作原理同按钮相似,只是变手动为撞块撞击。
撞块安装在机械部件的位移的工作台上。
未撞击撞击3、行程开关的工作原理当运动机械的挡铁压到滚轮上时,杠杆连同转轴一起转动,并推动撞块。
当撞块被压到一定位置时,推动微动开关动作,使常开触头分断,常闭触头闭合。
在当动动机械的挡铁离开后,复位弹簧使行程开关各部位部件恢复常态。
播放滚轮式动画4、行程开关的图文符号用行程开关控制工作台的前进与后退(自动往返循环控制线路)线路的工作原理(二)自动往返控制线路原理图自动往返示意图反转电动机运动状态正转向左工作台运动方向向右挡铁1挡铁2SQ3 SQ1SQ2 SQ4电路结构分析3、行程开关SQ 1和SQ 2分别控制工作台左右移动的行程。


行业资料:________ 起重机电器控制装置的检查单位:______________________部门:______________________日期:______年_____月_____日第1 页共7 页起重机电器控制装置的检查(1)超载保护装置。
超载保护装置是否灵敏可靠、符合设计要求,液压超载保护装置的开启压力;机械、电子及综合超载保护器报警、切断动力源设定点的综合误差是否符合要求。
(2)力矩限制器。
力矩限制器是臂架类型起重机防超载发生倾翻的安全装置。
通过增幅法或增重法检查力矩限制器灵敏可靠性,并检查力矩限制器报警、切断动力源设定点的综合误差是否在规定范围内。
(3)极限位置限制器。
检查起重设备的变幅机构,升降机构、运行机构达到设定位置距离时能否发生报警信号,自动切断向危险方向运行的动力源。
(4)防风装置。
对于臂架根部铰接点高度大于50米的起重机应检查风速仪,当达到风速设定点时或工作极限风速时能否准确报警。
露天工作在轨道上运行的起重机应检查夹轨器、铁鞋、锚固装置各零部件是否变形、缺损和它各自独立工作的可靠性。
对自动夹轨器,应检查对突发性阵风防风装置与大车运行制动器配合实现非锚定状态下的防风功能与电气联锁开关功能的可靠性。
(5)防后倾翻装置。
对动臂变幅和臂架类型起重机应检查防后倾装置的可靠性,电气联锁的灵敏性,检查变幅位置和幅度指示器的指示精度。
(6)缓冲器。
第 2 页共 7 页对不同类型起重量、运行速度不同的起重机,应检查所配置的缓冲器是否相匹配,并检查缓冲器的完好性、运行到两端能否同时触碰止挡。
(7)防护装置。
检查起重机上各类防护罩、护栏、护板、爬梯等是否完备可靠,起重机上外露的有可能造成卷绕伤人的、开式传动;联轴器、链轮、链条、传动带等转动零部件有无防护罩,起重机上人行通道,爬梯及可能造成人员外露部位有无防护栏,是否符合要求。
露天作起重机电气设备应设防雨罩。
起重机电气设备及电路的安全技术1.电气设备起重机的电气设备必须保证传动性能和控制性能准确可靠,在紧急、情况下能切断电源安全停车。
摘要随着时代的进步,世界开始进入新技术革命时代。
在利用信息的过程中,首先要解决的就是要获取准确可靠的信息,现代工业生产过程中,要用各种自动化设备来监视和控制整个生产过程,使各个设备能够在工作过程中呈现出最佳状态,生产出最好的产品。
因此,没有电气自动化的发展,现代化生产也就失去了根基。
所以,自动化就是将信息化和工业化一起发展。
大力发展电气自动化技术,既可以对传统产业有所帮助,又可以加快信息化的发展,以实现我国电气的全面工业化。
因此,自动化作为我国实现工业化和信息化的大政方针,必须成为我国行业的重中之重。
目前大中型企业普通采用了先进的自动化系统对生产过程进行控制,但绝大部分小型企业尚未应用自动化系统和产品对生产过程进行控制。
因此,自动化在我国的应用潜力远没有得到充分发挥。
在自动化生产线上,有些生产机械的工作台需要按一定的顺序实现自动往返运动,并且有的还要求在某些位置有一定的时间停留,以满足生产工艺要求。
用自动化系统实现工作台自动往返顺序控制,不仅具有程序设计简单、方便、可靠性高等特点,而且程序设计方法多样,便于不同层次设计人员的理解和掌握。
在本次设计中,通过对工作台自动往返循环系统原理分析,理解工作台的运行过程和其中的制约关系。
然后预选出电动机,对电动机的校验最终确定电动机的机型。
再对工作台的制约关系,设计电路的主控电路和控制电路,最终完成课程设计。
关键词自动化;工作台;往返循环控制目录1 绪论 (1)1.1设计背景 (1)1.2设计目的 (1)1.3设计任务及要求 (1)1.4设计指导 (2)2工作台往返循环电机拖动系统 (3)2.1拖动系统的机械运动示意图 (3)2.2拖动系统的工作原理 (3)3电动机及其他电气元件的选择 (4)3.1电动机容量的选择 (4)3.1.1电动机额定功率的选择 (4)3.1.2负载转矩的测量 (4)3.1.3电动机类型的选择 (5)3.1.4电动机电压的选择 (5)3.1.5电动机转速的选择 (6)3.1.6电动机外形结构的选择 (6)3.1.7电动机工作制的选择 (7)3.1.8电动机型号的选择 (8)3.2电动机的校验 (9)3.2.1电动机的起动校验 (9)3.2.2电动机的过载校验 (10)3.2.3电动机的稳定运行校验 (10)3.2.4电动机的发热校验 (10)3.3其他电气元件的选择 (12)3.3.1接触器的选用 (12)3.3.2继电器的选用 (12)4系统电路图设计 (14)4.1主电路的设计 (14)4.1.1主电路设计分析 (14)4.2控制电路设计 (15)4.2.1控制电路设计分析 (15)4.2.2控制电路电路图及原理 (15)结论 (20)参考文献 (21)1 绪论1.1 设计背景传统制造业使用大量人力进行加工的模式在现在成本费用不断提高的今天,面临巨大的压力。