反馈环路补偿设计-简述实例
- 格式:ppt
- 大小:56.00 KB
- 文档页数:13
反馈信号的原理和应用实例概述反馈信号是指从输出中采样得到的信号再馈入系统输入端的一种信号。
反馈信号的应用广泛,不仅可以在电子电路中起到稳定系统的作用,还可以在控制系统、通信系统等领域发挥重要作用。
原理反馈信号的原理可以概括为以下几点:1.正反馈和负反馈:根据反馈信号对系统的作用方式不同,可以分为正反馈和负反馈两种。
正反馈是指反馈信号与输入信号具有同样的极性,会放大或增强输入信号,从而引起系统不稳定。
而负反馈是指反馈信号与输入信号极性相反,能够抑制输入信号,使系统保持稳定。
2.反馈环路的结构:一个典型的反馈环路包括一个传感器、一个误差放大器和一个执行器。
传感器从系统的输出中采样得到反馈信号,误差放大器将反馈信号与期望信号比较,计算出系统的误差,并输出控制信号给执行器,执行器根据控制信号对系统进行调节。
3.稳定性和性能优化:反馈信号可以提高系统的稳定性和动态性能。
通过合理的反馈控制,可以使系统响应时间更快,误差更小,从而提高系统的稳定性和性能。
应用实例反馈信号在各个领域都有广泛的应用,下面列举几个常见的应用实例:1. 电子电路中的反馈控制在电子电路中,反馈信号被广泛应用于放大电路和稳压电路中。
比如,在放大电路中,通过将输出信号的一部分反馈到输入端,可以减小输出对输入信号的依赖,提高放大电路的稳定性和线性度。
2. 控制系统中的反馈控制在控制系统中,反馈信号被用于控制系统的闭环控制。
通过采样输出信号并与期望信号进行比较,可以计算出系统的误差,并通过调节控制信号来实现系统的稳定控制。
例如,自动温度控制系统中的温度传感器采集环境温度,并通过与设定温度进行比较,控制加热或制冷设备的运行状态。
3. 通信系统中的反馈控制在通信系统中,反馈信号被用于自适应调节等技术中。
通过采样接收信号并与发送信号进行比较,可以调整发送信号的参数,使得接收信号在噪声干扰下更加稳定。
例如,自适应均衡技术中,接收端采样接收信号,并通过与发送信号进行比较,调节均衡器的参数,使得接收信号的等化效果更好。
开关电源环路补偿设计开关电源环路补偿设计在开关电源设计中,环路补偿是至关重要的一步。
环路补偿的正确设计可以提高电源的稳定性和效率,从而提供更为可靠的电源输出。
本文将针对开关电源的环路补偿设计,从三个方面进行阐述。
一、开关电源环路补偿的基本原理开关电源的环路补偿,是指将部分输出信号回馈到反馈端口,通过正反馈作用来改善系统的动态性能。
补偿的目的,是使电源输出稳定,对负载的响应性更好。
为了实现这一目的,设计师需要对开关电源的基本原理有深入的理解。
在开关电源中,电容、电感和频率之间的相互影响是至关重要的。
通过合理的组合设计,可以提高电源的效率,降低功耗。
二、开关电源环路补偿的设计方法开关电源的环路补偿设计方法,需要综合考虑多个参数,如响应时间、阻尼稳定性、相位裕度等。
其中,响应时间涉及到电路响应时间、电源传输函数以及负载条件,需要根据具体情况予以调整。
阻尼稳定性关系到系统的稳态稳定性,需要根据不同负载条件下的阻尼因素予以设计。
相位裕度涉及到极点间距,可以通过更改反馈回路的增益稳定性来达到较好的效果。
三、开关电源环路补偿的优化在实际电路中,由于电容、电感和负载等多种因素的影响,开关电源环路补偿存在一定的误差。
优化环路补偿,可以通过在电路中加入滤波电容、降低负载电感等措施,提高电源输出的稳定性。
此外,在滤波器的选型方面,选择与系统肖特基二极管参数相匹配的器件,可以较为有效地降低噪声和振荡。
总之,开关电源环路补偿对整个系统的性能至关重要。
一个合理的补偿设计将使电源输出变得更加稳定、高效,具有更好的响应性。
因此,在开发开关电源的过程中,我们应该时刻保持对环路补偿原理的理解,并综合考虑各种参数和因素,以达到最优的设计效果。
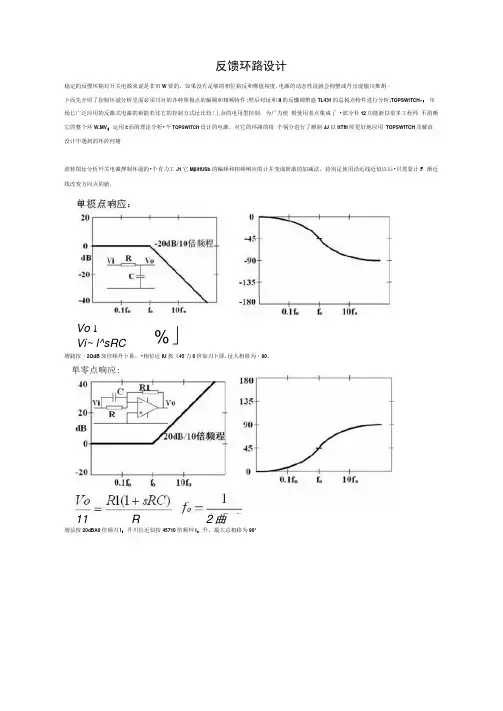
反馈环路设计稳定的反惯坏豁对开关电源來说是非帘W要的,如果没冇足够的相位裕反和梆值裕度,电激的动念性徒就会徇塑或丹出现输川推胡・卜而先介绍了控制坏滋分析里面必須川対的齐种第极点的幅频和相频特忤;然后对址和II的反懺调幣盎TL431的总税点特忤进行分析;TOPSWITCH«:市场匕广泛应用的反激式电激的褂能若比它的控制方式址比较!丄余的电用型控制,为广力便般使用者点集成了•部分补12功能浙以很多工程师不涓晰它的整个环W.MV;运用I:而的理论分析•个TOPSWITCH设计的电激,对它的环路的毎个祸分进行了解制JJ以ttTffi师更好地应用TOPSWfTCH及解浪没计中遇到的坏於何瘪波特图址分析歼关电激押制坏滋的•个有力工J1它MjiittUSb的褊频和相频响应的计并变成简敢的加减法,持別足使用沿近线近似以后•只需耍计F 渐近线改变方向点的値.Vo 1Vi~ l^sRC%」增銘按・2OdB加倍频丹卜鼻,•相位近IU按《45力0侪如刃卜降.址人相移为・90。
增益按20dBA0倍频刃I:升川位近似按45710倍频艸I:升,最大总相移为90*单零点响应:11 R 2曲右半平而零点:Vo $右半平而零点楚反懑和BOOST电路巴而待仃的现©用益按2OdB/lO倍频f¥匕升川位近似按-45W0倍频程卜降,总相移为£0。
”半平面笑点址儿乎无法补偿的•做没计时尽1ft把其频率提升或降乂带宽双极点咱应:Vo________ 1 _______Vi 1+ s/(Oajo)+ (“仙)2血5二肯Q=R嚼K = 5^Q伏肚电酬的閉皈因物过了谐旅点后用益按VOdB/10倍频軒卜附相位依Q仪的不同行不同的变化卒q値越人,相位变化越剧烈准谐按点相付址•90: JR大总相移沟・180,低Q 值的双极点响应[小当Q«0.5时Vo 1 八 1 - = ------------------- Jo 2 ------ { 肝(1 +二(1+丄).2兀亦 ai cole"2冗它血2~2莎米吕Q 值是电豁的川2足负戎电川,“足电瑕的电乩电容的ESR,廉流笛肌和代农05心稅耗和的合成电分的AC/DC 电游川I耗较爲•股Q 值很难大f 3.当a 值较低时(Q«05)r ««点响应会邈化为两个单极点响应,如上fflffizji.TL431用输出供电肘的零报点特性TL431足歼关电激次级反懺业常用的堆強和洪连妝大潯件丿U 供电方咒不何对它的传递祈&创H 大的彩响,而以洲的分析资料常常忽HS 这点.卜而分 析帘见的供电和输lllftttl 接在一起时的传递沼数.7Vo-VI 5 RZsJ lapto = ------ V\ = ------------ V o- 島尺1丄+巩尺 + j?i )clouto 1 + s(R + Ri)C把门带入前面的公式ropto=—帀;卡-——sRIRhCJoIrfaL R\交流分析等效电路sBIRhC115沖旳在输唤“电沁"唤2诧"1)C'而不疋2曲•剛使没有R,只接•个C的情况人爭点还是存在■如杲R1远大十R罟点的位置主要有反馈网络的上分压电阻决定.为了抑制输出的开关紋液■有时在后面加个LC濾沈如卜而TOP245Y电滅的L2r C8,H谐抿频率般欠約为幷关频率的WO-WO左右;这个频率通亦远大于反惯同路的带宽庆彤响町以忽略.56入-J~Kpivr 11J~Me i •输岀反滋电压控叙方式反琳路JU开坏传递换&为K=(Kmod • Kpv/r • Klc <KfbrKea=Ki*KeaKpv/r楚功率8B分.Klc足输出LC就波卻分,Kfb足反懺分爪乩分,Kea於反愤补偿師分和丸耦鬲分,Kmod兄调制器部分,在做补偿设计以也先计炸出滋Kea 外aflffl分的频奉特忆然方计如II K"KH2d・ Kpwr・ KlLKfb的频宅特他根t«实S愴况确定出滿婪的设计目标Kea,然A;通过设il TL431的相应补卷来完成Kea的鉴求.站介上而的媒理图我们来计#•在115VAC%入时存个即分的【加1&tfiVinslSSV.VoutslZV, C6fC7 ESR=5OmQ,负R=4.8n, q=81%由⑵叫fel:Np=58T, NS=6T, Lp=827uH, Vor=120V,Vd$=5.2Vvor足次级反射到初级的电H;,9为初级绕组电级,is为次级绕组电瑕,D为占空比.则:2:,:Li>=8.85uH. I)=VorVin^- Vor- Vds=0.48下而我门将用上而的堆础知识来分析个典型的TOPSWITH电激的號创坏路,这楚•个宽园输入,12V25A箝出的个反激电魄躱理图如下:下而为反酒电爪方式的反馈环禺图:功率儒分和输出LC 法波祁分林i 号传递由汝⑸竺=£如严Ns 、水厂+存1-不) d (1 - oy Np* \ | /1 1创=歳=0^560 = 3皿 心加(2补泅皿 &臬电容自身的E$R 形成的零点的频率。
拜师求学反馈环路设计、调式先去把自控原理(经典部分)看一遍,搞懂零,极点的概念,因为电源在小信号的情况下就是一个很典型的小相角系统,什么叫看懂,那到一个电源,一看反馈部分马上零,极点就可以写出来。
而PWM部分和滤波部分对固定的电路拓扑和控制形式(电压或电流),其零,极点都有响应的公式写出。
如果你要详细的数学计算,再去看自控的超前,滞后补偿部分,但这种计算来的一般不会太准,但可以作为一个调试的起点,最后的检测一般用电子负载做动态加减载实验就可以(专用仪器非常贵)。
一般的电源设电流变化率为1A/uS或5,10A/uS。
50-100%负载变化,看电压变化,如果电压很缓慢的回到稳态值,说明相角裕度太大,如果震荡2个周期以上回到稳态值,相角裕度一般只有二,三十度,太小,如果一个周期左右,则相角裕度一般为50-60度,正好。
当然如果电源本身就震荡,则震荡的频率就是你的环路的交越频率,既带宽,说明在此频率处相位移已经到了360度,解决的方法要么减小带宽:加大补偿的电容值,或加大反馈分压的电阻值,当你改变这些值不起作用时,要看环路的其他方面,既加零点,如TL431做反馈,当补偿电容加的很大还不行时,其实应该在其与光偶串联的支路加补偿(RC),这样增加了一个低频零点和一个高频极点,高频极点由于频率很高,不在环路带宽以内,对环路没有影响。
太多了,很难说完,我想说的是只要很明确的知道零,极点的概念,环路问题实际上很简单(当然,要正确的应用到电源里面来是花很多时间的,由于没有老师,我研究了近一年),也可以用相关软件来模拟,但并非易事,因为模型很难准确的建立,举个例子,如电压型控制的反击(CCM 工作方式),如果TL431只加一个补偿电容,用PSPICE模拟的结果基本上是不稳定的,但实际中大部分电源是稳定的,怎么解释,原因是输出滤波部分实际上并不是一个严格的二阶系统,由于绕组电阻,高频阻抗,二极管电阻,电容电阻,特别是次级损耗要等效为一个较大的电阻,这样两个极点并不会重合(二阶系统),它变成了两个不同频率的一阶系统的串联,所以它的相位移变化并不剧烈,加上其他零点的影响,相位并不会到360度,这是用PSIPCE模拟时要人为给二极管或电容加一个很大的电阻,如1欧姆,才会得出正确的结果。
开关电源反馈环路设计开关电源是一种将输入直流电压转换为所需输出电压的电源装置。
为了实现稳定可靠的输出电压,开关电源需要建立反馈环路进行控制。
开关电源的反馈环路主要包括内部反馈环路和外部反馈环路。
内部反馈环路是指内部电路中的反馈控制电路,用于控制开关管的导通与截止,以维持输出电压的稳定。
外部反馈环路是指从输出端以回路的形式连接到内部反馈电路,通过比较输出电压与参考电压的差异,产生一个控制信号,用于调整开关电源的开关时间和频率,从而调整输出电压。
设计开关电源的反馈环路时,需要考虑以下几个方面:1.选择合适的参考电压源:参考电压源是反馈环路的重要组成部分,它提供一个稳定的参考电压,用作与输出电压进行比较的基准。
一般可选择使用稳压二极管、参考电压芯片或者精密电位器来作为参考电压源。
2.设计错误放大器:错误放大器是反馈环路中的核心部分,它承担着将输出电压与参考电压进行比较的作用,并产生一个误差信号。
常见的错误放大器有比较器、运算放大器等。
在设计选择错误放大器时,需要考虑它的稳定性、带宽、输入阻抗等因素。
3.设计补偿网络:由于开关电源在转换过程中存在一定的延迟、输出的电压下降等因素,所以需要通过补偿网络来减小这些不稳定因素对输出电压的影响。
常见的补偿网络包括零点补偿网络和极点补偿网络。
零点补偿网络主要通过增加相位较大的零点,来提高系统稳定性;极点补偿网络主要通过增加相位较小的极点,来提高系统的相位裕度。
4.设计输出滤波器:开关电源的输出电压通常包含一定的纹波,需要通过输出滤波器来降低纹波,使输出电压更加稳定。
输出滤波器一般由电感、电容和电阻组成,通过调整它们的数值和组合方式,可以实现对纹波的去除或衰减。
在进行开关电源反馈环路的设计时,还需要进行一系列的仿真和实验,包括频率响应的模拟分析、稳态和动态的性能测试等,以确保设计的反馈环路能够实现对输出电压的稳定控制。
总之,开关电源的反馈环路设计是一项复杂的任务,需要综合考虑电源的性能要求、稳定性要求和实际应用需求等因素,通过选择适当的参考电压源、设计错误放大器、补偿网络和输出滤波器等,来实现对输出电压的稳定控制。
离散控制系统中的反馈与补偿设计离散控制系统是一种将连续时间信号转化为离散时间信号,并进行控制的系统。
在离散控制系统中,反馈与补偿设计起着至关重要的作用。
本文将介绍离散控制系统中的反馈与补偿设计的原理和方法。
1. 反馈控制设计反馈控制是离散控制系统中常用的控制方法之一。
其基本原理是根据系统的输出与期望输出之间的误差来调节控制器的输出,以使系统的性能得到改善。
在离散控制系统中,反馈控制的设计主要分为两个步骤:系统建模和控制器设计。
首先,需要对系统进行建模,得到系统的传递函数或状态空间表达式。
根据系统的特性,选择适当的控制器类型,如比例控制器、积分控制器、微分控制器或PID控制器等。
根据系统的特性和性能要求,调整控制器的参数,以实现期望的控制效果。
2. 补偿设计补偿设计是指在离散控制系统中,通过添加补偿器来改善系统的性能。
补偿器可以根据系统的特性和要求来设计,以提高系统的稳定性、抗干扰性和跟踪性能。
补偿器的设计可以采用频域设计方法或时域设计方法。
在频域设计方法中,可以使用根轨迹法、频率响应法或者Bode图法来设计补偿器。
在时域设计方法中,可以使用传统的校正器法或者通过优化算法来设计补偿器。
3. 组合反馈与补偿设计在实际的离散控制系统中,常常需要同时使用反馈控制和补偿设计来满足系统的性能要求。
组合反馈与补偿设计可以通过串级或并联的方式来实现。
串级控制是指将反馈控制和补偿器按照一定的顺序连接起来,使输出信号经过反馈和补偿后再输入下一个环节进行控制。
串级控制可以提高系统的稳定性和跟踪性能,在一定程度上抑制干扰。
并联控制是指将反馈控制和补偿器同时作用于系统中,分别对系统的输入和输出进行调节。
并联控制可以通过控制输出来改变输入信号,并实现一定的控制目标。
4. 实例分析为了更好地理解离散控制系统中的反馈与补偿设计,我们以温度控制系统为例进行分析。
假设我们需要设计一个温度控制器,使得系统的温度能够稳定在设定的值附近。
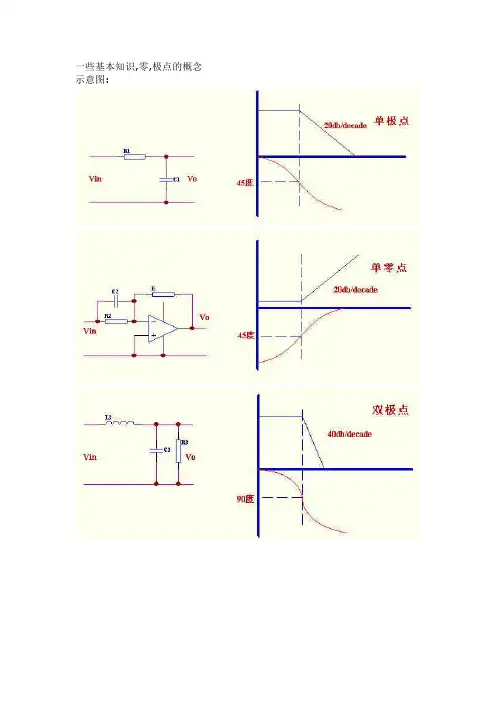
一些基本知识,零,极点的概念示意图:这里给出了右半平面零点的原理表示,这对用PSPICE做仿真很有用,可以直接套用此图.单极点补偿,适用于电流型控制和工作在DCM方式并且滤波电容的ESR零点频率较低的电源.其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180度以前使其增益降到0dB. 也叫主极点补偿.双极点,单零点补偿,适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制.三极点,双零点补偿.适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑.注:2,3中公式里面根据实际情况有些简化.一般C2<<C1.首先,没有笔误存在.1/R1C1确实一个在原点的极点.看上图,横轴是频率轴,竖轴是增益轴,从横轴往左时(低频),增益安20DB升高,往右时(高频),安20DB减少.C1的主要作用是和R2提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好.C2增加了一个高频极点,降低开关躁声干扰.补偿部分的输出我觉得应该是电流,我认为下面的这种传递函数推倒更能理解一些,请指点.这样推导出来的零点就同你上面推导的有差别了.环路稳定的标准.只要在增益为1时(0dB)整个环路的相移小于360度,环路就是稳定的.但如果相移接近360度,会产生两个问题:1)相移可能因为温度,负载及分布参数的变化而达到360度而产生震荡;2)接近360度,电源的阶跃响应(瞬时加减载)表现为强烈震荡,使输出达到稳定的时间加长,超调量增加.如下图所示具体关系.所以环路要留一定的相位裕量,如图Q=1时输出是表现最好的,所以相位裕量的最佳值为52度左右,工程上一般取45度以上.如下图所示:这里要注意一点,就是补偿放大器工作在负反馈状态,本身就有180度相移,所以留给功率部分和补偿网络的只有180度.幅值裕度不管用上面哪种补偿方式都是自动满足的,所以设计时一般不用特别考虑.由于增益曲线为-20dB/decade时,此曲线引起的最大相移为90度,尚有90度裕量,所以一般最后合成的整个增益曲线应该为-20dB/decade部分穿过0dB.在低于0dB带宽后,曲线最好为-40dB/decade,这样增益会迅速上升,低频部分增益很高,使电源输出的直流部分误差非常小,既电源有很好的负载和线路调整率.四, 如何设计控制环路?经常主电路是根据应用要求设计的,设计时一般不会提前考虑控制环路的设计.我们的前提就是假设主功率部分已经全部设计完成,然后来探讨环路设计.环路设计一般由下面几过程组成:1) 画出已知部分的频响曲线.2) 根据实际要求和各限制条件确定带宽频率,既增益曲线的0dB频率.3) 根据步骤2)确定的带宽频率决定补偿放大器的类型和各频率点.使带宽处的曲线斜率为20dB/decade,画出整个电路的频响曲线.上述过程也可利用相关软件来设计:如pspice, POWER-4-5-6.一些解释:已知部分的频响曲线是指除Kea(补偿放大器)外的所有部分的乘积,在波得图上是相加.环路带宽当然希望越高越好,但受到几方面的限制:a)香农采样定理决定了不可能大于1/2 Fs; b)右半平面零点(RHZ)的影响,RHZ随输入电压,负载,电感量大小而变化,几乎无法补偿,我们只有把带宽设计的远离它,一般取其1/4-1/5;c)补偿放大器的带宽不是无穷大,当把环路带宽设的很高时会受到补偿放大器无法提供增益的限制,及电容零点受温度影响等.所以一般实际带宽取开关频率的1/6-1/10五,反激设计实例.条件: 输入85-265V交流,整流后直流100-375V输出12V/5A初级电感量370uH初级匝数:40T,次级:5T次级滤波电容1000uF X 3=3000uF震荡三角波幅度.2.5V开关频率100K电流型控制时,取样电阻取0.33欧姆下面分电压型和峰值电流型控制来设计此电源环路.所有设计取样点在输出小LC前面.如果取样点在小LC后面,由于受LC谐振频率限制,带宽不能很高.1) 电流型控制假设用3842,传递函数如下此图为补偿放大部分原理图.RHZ的频率为33K,为了避免其引起过多的相移,一般取带宽为其频率的1/4-1/5,我们取1/4为8K.分两种情况:A) 输出电容ESR较大输出滤波电容的内阻比较大,自身阻容形成的零点比较低,这样在8K处的相位滞后比较小.Phanse angle = arctan(8/1.225)-arctan(8/0.033)-arctan(8/33)= --22度.另外可看到在8K处增益曲线为水平,所以可以直接用单极点补偿,这样可满足-20dB/decade的曲线形状.省掉补偿部分的R2,C1.设Rb为5.1K, 则R1=[(12-2.5)/2.5]*Rb=19.4K.8K处功率部分的增益为-20* log(1225/33)+20* log19.4 = -5.7dB因为带宽8K,即8K处0dB所以8K处补偿放大器增益应为5.7dB, 5.7-20* log( Fo/8)=0Fo为补偿放大器0dB增益频率Fo= 1/(2*pi*R1C2)=15.42C2= 1/(2*pi*R1*15.42)=1/(2*3.14*19.4*15.42)=0.53nF相位裕度: 180-22-90=68 度输出滤波电容的内阻比较大,自身阻容形成的零点比较高,这样在8K处的相位滞后比较大.Phanse angle = arctan(8/5.3)-arctan(8/0.033)-arctan(8/33)= -47度. 如果还用单极点补偿,则带宽处相位裕量为180-90-47=43度.偏小.用2型补偿来提升.三个点的选取,第一个极点在原点,第一的零点一般取在带宽的1/5左右,这样在带宽处提升相位78度左右,此零点越低,相位提升越明显,但太低了就降低了低频增益,使输出调整率降低,此处我们取1.6K.第二个极点的选取一般是用来抵消ESR零点或RHZ零点引起的增益升高,保证增益裕度.我们用它来抵消ESR零点,使带宽处保持-20db/10 decade 的形状,我们取ESR零点频率5.3K数值计算:8K处功率部分的增益为-20* log(5300/33)+20* log19.4 = -18dB因为带宽8K,即最后合成增益曲线8K处0dB所以8K处补偿放大器增益应为18dB, 5.3K处增益=18+20log(8/5.3)=21.6 dB水平部分增益= 20logR2/R1=21.6 推出R2=12*R1=233Kfp2=1/2*pi*R2C2 推出C2=1/(2*3.14*233K*5.4K)=127pF.fz1=1/2*pi*R2C1 推出C1=1/ (2*3.14*233K*1.6K)=0.427nF.相位fo 为LC谐振频率,注意Q值并不是用的计算值,而是经验值,因为计算的Q无法考虑LC串联回路的损耗(相当于电阻),包括电容ESR,二极管等效内阻,漏感和绕组电阻及趋附效应等.在实际电路中Q值几乎不可能大于4—5.由于输出有LC谐振,在谐振点相位变动很剧烈,会很快接近180度,所以需要用3型补偿放大器来提升相位.其零,极点放置原则是这样的,在原点有一极点来提升低频增益,在双极点处放置两个零点,这样在谐振点的相位为-90+(-90)+45+45=-90.在输出电容的ESR处放一极点,来抵消ESR的影响,在RHZ处放一极点来抵消RHZ引起的高频增益上升.元件数值计算,为方便我们把3型补偿的图在重画一下.兰色为功率部分,绿色为补偿部分,红色为整个开环增益.如果相位裕量不够时,可适当把两个零点位置提前,也可把第一可极点位置放后一点.同样假设光耦CTR=1,如果用CTR大的光耦,或加有其他放大时,如同时用IC的内部运放,只需要在波得图上加一个直流增益后,再设计补偿部分即可.这时要求把IC内部运放配置为比例放大器,如果再在内部运放加补偿,就稍微麻烦一点,在图上再加一条补偿线结束.我想大家看完后即使不会计算,出问题时也应该知道改哪里.我的图是用POWER-4-5-6仿真的,它里面含有简化版本的PSPICE.你可以用ORCAD来仿真,用行为模型库(ABM)里面的ELAPLACE把传递函数填进去就行了.电路仿真稍微麻烦一点.下面是归一化的电压型控制功率部分的小信号模型,据此加上控制部分就全了.如果不明白就去再学习了,我不可能从头讲起.下面是根据上面的图建立的一个实际仿真图,由于一点地方不方便说,所以省略掉了,可以根据具体的电路去补一下.把三部分拼接起来,如果我一起放上来,就看不清了.从这个图,可以看到PSPICE里面仿真变压器的另外一种方法.电流型的小信号模型就更简单了(当然是用的简单模型,复杂模型会很复杂),把控制电压到输出滤波的部分用一个压控电流源代替就行了,其增益为Ns/Rsense,Ns为电流互感器的变比,Rsense为电流采样电阻,如果直接用电阻采样,Ns等于1.。
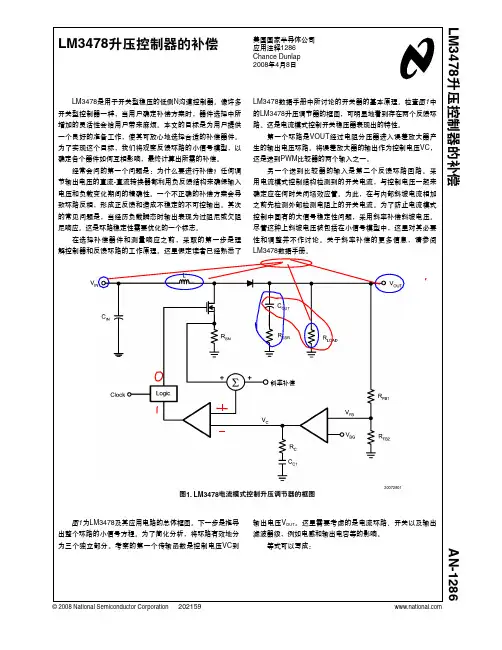
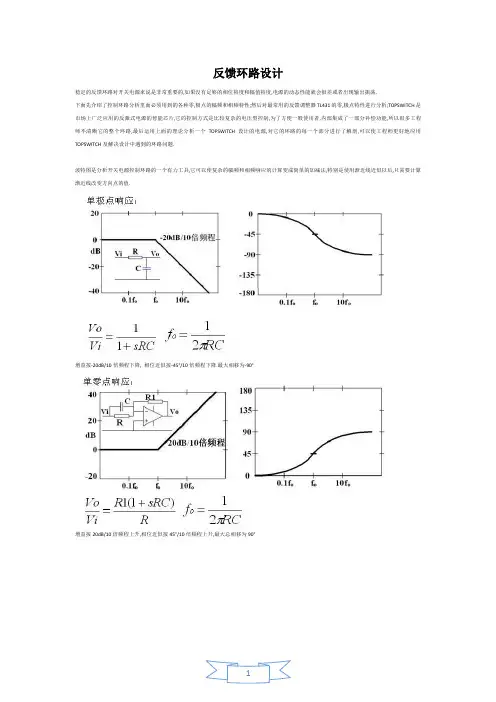
反馈环路设计稳定的反馈环路对开关电源来说是非常重要的,如果没有足够的相位裕度和幅值裕度,电源的动态性能就会很差或者出现输出振荡.下面先介绍了控制环路分析里面必须用到的各种零,极点的幅频和相频特性;然后对最常用的反馈调整器TL431的零,极点特性进行分析;TOPSWITCH是市场上广泛应用的反激式电源的智能芯片,它的控制方式是比较复杂的电压型控制,为了方便一般使用者,内部集成了一部分补偿功能,所以很多工程师不清晰它的整个环路,最后运用上面的理论分析一个TOPSWITCH设计的电源,对它的环路的每一个部分进行了解剖,可以使工程师更好地应用TOPSWITCH及解决设计中遇到的环路问题.波特图是分析开关电源控制环路的一个有力工具,它可以使复杂的幅频和相频响应的计算变成简单的加减法,特别是使用渐近线近似以后,只需要计算渐近线改变方向点的值.增益按-20dB/10倍频程下降, 相位近似按-45°/10倍频程下降.最大相移为-90°增益按20dB/10倍频程上升,相位近似按45°/10倍频程上升,最大总相移为90°右半平面零点是反激和BOOST电路里面特有的现象.增益按20dB/10倍频程上升,相位近似按-45°/10倍频程下降,总相移为-90°,右半平面零点是几乎无法补偿的,做设计时尽量把其频率提升或降低带宽Q值是电路的品质因数,过了谐振点后,增益按-40dB/10倍频程下降, 相位依Q值的不同有不同的变化率,Q值越大,相位变化越剧烈,在谐振点相位是-90°, 最大总相移为-180°Q值是电路的品质因数,R2是负载电阻,R1是电感的电阻,电容的ESR, 整流管内阻,和代表磁心损耗和漏感损耗的合成电阻.大部分的AC/DC电源,由于损耗较高,一般Q值很难大于3. 当Q值较低时(Q<<0.5),双极点响应会退化为两个单极点响应,如上图所示.TL431用输出供电时的零,极点特性TL431是开关电源次级反馈最常用的基准和误差放大器件,其供电方式不同对它的传递函数有很大的影响,而以前的分析资料常常忽略这一点.下面分析常见的供电和输出反馈接在一起时的传递函数.从上面的公式可以看到,在输出直接给431供电的情况下,零点的位置在, 即使没有R,只接一个C的情况下,零点还是存在,如果R1远大于R,零点的位置主要有反馈网络的上分压电阻决定.为了抑制输出的开关纹波,有时在后面加一个LC滤波,如下面TOP245Y电源的L2,C8,其谐振频率一般大约为开关频率的1/10-1/20 左右,这个频率通常远大于反馈回路的带宽,其影响可以忽略.下面我们将用上面的基础知识来分析一个典型的TOPSWITH电源的控制环路,这是一个宽范围输入,12V/2.5A输出的一个反激电源,原理图如下:下面为反激电压方式的反馈环路图:其开环传递函数为K=(Kmod * Kpwr * Klc *Kfb)*Kea=K1*KeaKpwr是功率部分,Klc是输出LC滤波部分,Kfb是反馈分压部分,Kea是反馈补偿部分和光耦部分,Kmod是调制器部分,在做补偿设计以前,先计算出除Kea 外各自部分的频率特性,然后计算出K1= Kmod * Kpwr * Klc *Kfb的频率特性,根据实际情况确定出需要的设计目标Kea , 然后通过设计TL431的相应补偿来完成Kea的要求.结合上面的原理图我们来计算在115VAC输入时各个部分的数值.已知数值:Vin=135V, Vout=12V, C6,C7 ESR=50mΩ, 负载R=4.8Ω, η=81%由[2]可知:Np=58T, Ns=6T, Lp=827uH, Vor=120V,Vds=5.2VVor是次级反射到初级的电压,Lp为初级绕组电感,Ls为次级绕组电感,D为占空比.功率部分和输出LC滤波部分小信号传递函数[3]fz2是右半平面零点的频率,此频率随负载R,电感Ls,和占空比D而变化,在此设计中频率是48k,高压时频率更高,AC/DC反激的带宽通常只有几k,远小于此频率的1/4,不会对控制带宽设计产生影响.Q值的确定,在开关电源里面要经过试验来确定.由于次级绕组的损耗,漏感的损耗,电容ESR的损耗及整流管内阻的损耗等,一般AC/DC电源,Q值相当低,在此电源中约0.15 , 由于Q=0.15<< 0.5, LC 振荡转变为两个双极点:ωP1= Q*ωO=0.15*4920=738; fo1= ωP1 /(2π)=117HzωP2= ωO/Q=4920/0.15=32800; fo2= ωP2/(2π)=5.22kHz把上述各个值带入公式(1)得到Kmod部分小信号传递函数Kmod是PWM部分的传递函数,TOPSWITCH是个高度集成的功率芯片,除了传统的PWM比较器外,芯片还外接启动用的电容和电阻,其必然对环路有影响,另外内部集成了一个7K的极点.Kmod,即TOPSWITCH部分的传递函数为:DCreg是PWM部分的直流增益,由[4]查出典型值是230,ωTOPSWITCH是7K.下面来确定ωz和ωp.右图是C脚的等效图,C为外接启动电容,在原理图上是C3, R为外接电阻R5和电容C3内阻(2欧姆)之和,Zc为C脚动态内阻,由[4]查处为15欧姆,C4做抗干扰用,由于值很小,在几KHz的有效带宽内不足以对环路造成影响.C脚总阻抗为:除补偿部分外的小信号传递函数K1:在此设计中,由于上分压电阻直接接到431基准端,所以Kfb=1如果要设计补偿部分,可以先确定目标带宽,然后再设计补偿部分,使在目标带宽时的相位裕量大于45°,在用TOPSWITCH设计的反激电源中,目标带宽除受到一般反激电源的几个限制外(带宽要小于开关频率的1/2; 右半平面零点的1/4; 运放增益限制,输出电容类型的选择等), 还受到内部7KHz极点的限制,一般不能太高,约1-2KHz, 对一般应用来说,已足够了.本文是对一个实际电源的分析,所以略过这一步,如果需要了解这个过程,可以从结果反推出来运放的补偿部分.TL431部分小信号传递函数:由于TL431用输出供电,按第3部分所述,其传递函数为:R6,R9大小决定了增益,由于R9由零点的位置而决定,所以整个增益的大小由调整R6来确定.CTR为光耦PC817C的实测电流传输比.补偿部分的波特图如下:从图上看补偿部分只有一个极点和零点,它们和TOPSWITCH里面的7KHz极点共同组成了一个II型补偿网络.7KHz极点用来抵消输出滤波电容零点,衰减噪音和开关纹波的干扰.总开环响应:整个环路的开环增益为K1和Kea的乘机,在波特图上是两部分的增益和相位的代数和.整个环路的开环波特图:实测波特图:交越频率1.16KHz, 相位裕量66.5°, 两者基本温和.。
多路输出反激式开关电源的反馈环路设计引言开关电源的输出是直流输入电压、占空比和负载的函数。
在开关电源设计中,反馈系统的设计目标是无论输入电压、占空比和负载如何变化,输出电压总在特定的范围内,并具有良好的动态响应性能。
电流模式的开关电源有连续电流模式(CCM)和不连续电流模式(DCM)两种工作模式。
连续电流模式由于有右半平面零点的作用,反馈环在负载电流增加时输出电压有下降趋势,经若干周期后最终校正输出电压,可能造成系统不稳定。
因此在设计反馈环时要特别注意避开右半平面零点频率。
当反激式开关电源工作在连续电流模式时,在最低输入电压和最重负载的工况下右半平面零点的频率最低,并且当输入电压升高时,传递函数的增益变化不明显。
当由于输入电压增加或负载减小,开关电源从连续模式进入到不连续模式时,右半平面零点消失从而使得系统稳定。
因此,在低输入电压和重输出负载的情况下,设计反馈环路补偿使得整个系统的传递函数留有足够的相位裕量和增益裕量,则开关电源无论在何种模式下都能稳定工作。
1 反激式开关电源典型设计图l是为变频器设计的反激式开关电源的典型电路,主要包括交流输入整流电路,反激式开关电源功率级电路(有PWM控制器、MOS管、变压器及整流二极管组成),RCD缓冲电路和反馈网络。
其中PWM控制芯片采用UC2844。
UC2844是电流模式控制器,芯片内部具有可微调的振荡器(能进行精确的占空比控制)、温度补偿的参考基准、高增益误差放大器、电流取样比较器。
开关电源设计输入参数如下:三相380V工业交流电经过整流作为开关电源的输入电压Udc,按最低直流输入电压Udcmin 为250V进行设计;开关电源工作频率f为60kHz,输出功率Po为60W。
当系统工作在最低输入电压、负载最重、最大占空比的工作情况下,设计开关电源工作在连续电流模式(CCM),纹波系数为0.4。
设计的开关电源参数如下:变压器的原边电感Lp=4.2mH,原边匝数Np=138;5V为反馈输出端,U5V=5V,负载R5=5Ω,匝数N5V=4,滤波电容为2个2200μF/16V电容并联,电容的等效串联电阻Resr=34mΩ;24V输出的负载R24=24Ω,匝数N24V=17;15V输出的负载R15=15Ω,匝数N15V=1l;一1 5V输出的负载R-15V=15Ω,匝数N-15V=11。
环路反馈补偿电路波形为馒头波-概述说明以及解释1.引言概述:环路反馈补偿电路是电子电路中常用的一种设计技术,通过反馈回路来修正电路中的非线性、漂移等问题,提高电路的稳定性和性能。
同时,电路波形在实际应用中也是一个重要的指标,能够反映电路的动态特性和响应速度。
在本文中,我们将讨论环路反馈补偿电路的原理,分析馒头波形的特征以及探讨环路反馈补偿电路波形为馒头波的原因,以期深入探讨这一重要的电路设计技术及其对电路性能的影响。
1.1 概述部分的内容1.2 文章结构本文将分为三大部分进行论述。
首先,在引言部分将对环路反馈补偿电路和馒头波形进行简要介绍,概述本文的研究内容和意义。
其次,在正文部分将详细讨论环路反馈补偿电路的基本原理和馒头波形的特征分析,重点探讨环路反馈补偿电路波形为馒头波的原因。
最后,在结论部分将总结环路反馈补偿电路的重要性,分析馒头波形对电路性能的影响,并展望环路反馈补偿电路波形研究的未来发展方向。
通过以上结构安排,旨在全面深入地探讨环路反馈补偿电路波形为馒头波的相关问题,为读者提供一份系统且有价值的研究文献。
1.3 目的目的部分旨在明确本文的研究目的和意义。
通过对环路反馈补偿电路波形为馒头波的原因进行深入探讨,我们旨在深化对环路反馈补偿电路工作原理的理解,探索其在电路设计和性能优化中的应用潜力。
同时,通过分析馒头波形的特征,我们可以更好地理解电路波形对电路性能的影响,并进一步指导工程实践中的电路设计和优化工作。
本文旨在为电路工程师和研究人员提供有益的参考和启发,推动环路反馈补偿电路波形研究的进一步发展,促进电路设计的创新和进步。
2.正文2.1 环路反馈补偿电路的基本原理环路反馈补偿电路是一种常用的电路设计技术,用于增加电路的稳定性和减小非线性失真。
其基本原理是通过引入反馈回路,将部分输出信号反馈到输入端,对输入信号进行调节,以控制输出信号的特性。
在环路反馈补偿电路中,一般采用负反馈的方式,即将一部分输出信号与输入信号进行比较,并生成误差信号,通过控制电路来减小这个误差,从而达到稳定的输出。
led驱动的环路补偿
LED驱动的环路补偿是为了改善LED驱动电路的性能而采取的一种措施。
由于LED驱动电路中存在许多因素,如电感、电容、电阻等,这些因素可能导致电路中的相位偏移和增益下降,从而影响电路的性能。
通过环路补偿,可以调节电路中的反馈系数,使得电路的相位偏移和增益下降得到补偿,从而改善电路的性能。
具体来说,环路补偿的原理是将一个补偿电路接入到LED驱动电路中,该补偿电路会产生一个与相位偏移和增益下降相反的作用,从而抵消这些因素的影响,使电路的性能得到改善。
在实际应用中,环路补偿的方法有很多种,如PID控制、双环控制等。
这些方法各有优缺点,具体采用哪种方法需要根据实际应用的情况进行选择。
同时,环路补偿的参数也需要根据实际应用进行调整,以达到最佳的补偿效果。
反激式开关电源的环路补偿设计与应用摘要反激式开关电源工作的稳定性与其反馈环路有很大的关系,若反馈环路系统没有足够的幅值、相位裕度,开关电源工作将会不稳定且出现输出振荡。
文章基于TNY278芯片开关电源的环路补偿设计为例,详细分析了其环路补偿电路,根据分析验证,总结出该方法不仅能有效控制整个环路的稳定性而且可以降低输出振荡,满足设计要求。
关键字反激式开关电源相位裕度幅值裕度环路补偿穿越频率Design and application of loop compensation for flyback switching power supplyYE Zhenxiong XU Wenyi CHENYouzhang MAZhengxian(TCL air conditioner (Zhongshan) Co., Ltd Zhongshan,Guangdong 528427)Abstract The stability of flyback switching power supply is closely related to its feedback loop. If the feedback loop system does not have enough amplitude and phase margin, the switching power supply will be unstable and output oscillation will occur. Based on theTNY278 chip switching power supply loop compensation design as an example, detailed analysis of the loop compensation circuit, according to the analysis and verification, summed up the method can not only effectively control the stability of the whole loop, but also reduce the output oscillation, meet the design.Keywords Flyback switching power supply Phase margin Amplitude margin Loop compensation Crossing frequency引言随着半导体行业的发展,开关电源的应用场合不断拓宽。