线性系统能观性能控性判定
- 格式:ppt
- 大小:4.34 MB
- 文档页数:83
第4章(1)线性控制系统的能控性和能观性第四章线性控制系统的能控性和能观性在现代控制理论中,能控性(Controllability)和能观性(Observ- ability)是两个重要的概念,它是卡尔曼(Kalman)在1960年提出的,是最优控制和最优估计的设计基础。
能观(测)性针对的是系统状态空间模型中的状态的可观测性,它反映系统的内部状态x(t)(通常是不可以直接测量的)被系统的输出量y(t)(通常是可以直接测量的)所反映的能⼒。
能控性严格上说有两种,⼀种是系统控制输⼊u(t)对系统内部状态x(t)的控制能⼒,另⼀种是控制输⼊u(t)对系统输出y(t)的控制能⼒。
但是⼀般没有特别指明时,指的都是状态的可控性。
所以,系统的能控性和能观性研究⼀般都是基于系统的状态空间表达式的。
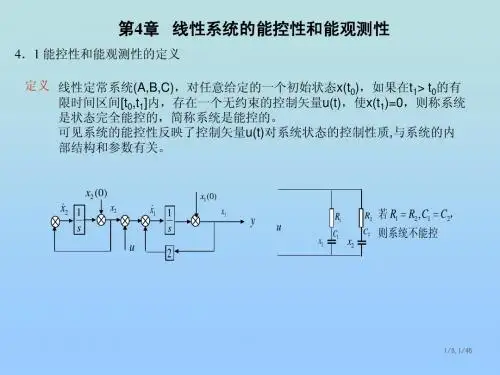
4-1 线性连续定常系统的能控性定义对于单输⼊n 阶线性定常连续系统bu Ax x+= 若存在⼀个分段连续的控制函数u(t),能在有限的时间段 []f t t ,0内把系统从0t 时刻的初始状态()0t x 转移到任意指定的终态()f t x ,那么就称系统在0t 时刻的状态()0t x 是能控的;如果系统每⼀个状态()0t x 都能控,那么就称系统是状态完全可控的。
反之,只要有⼀个状态不可控,我们就称系统不可控。
对于线性定常连续系统,为简便计,可以假设00=t ,()0=f t x ,即00=t 时刻的任意初始状态()0x ,在有限时间段转移到零状态()0=f t x (原点)。
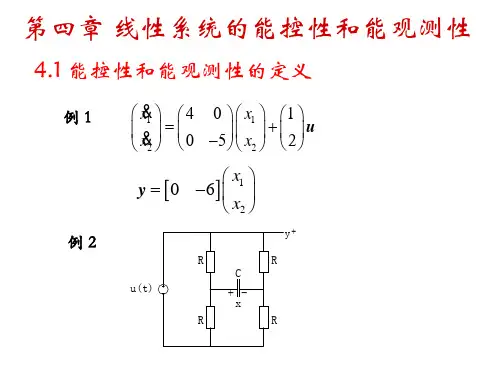
4-2线性连续定常系统的能控性判别4-2-1具有约旦标准型系统的能控性判别 1.单输⼊系统具有约旦标准型系统bu x x+Λ==Λn λλλλ0000000000000321n λλλλ≠≠≠≠ 321即为n 个互异根或bu Jx x+==++n m m J λλλλλλ000000000000000100000000121111m 个重根1λn-m 个互异根n m m λλλ≠≠≠++ 21 例:分析下列系统的能控性(1)u b x x+??=221000λλ[]x c c y 21=解:?=111x xλ 1x 与u ⽆关,即不受u 控制 ?+=u b x x2222λ 2x 为能控状态该系统为状态不完全能控,因⽽为不能控系统。
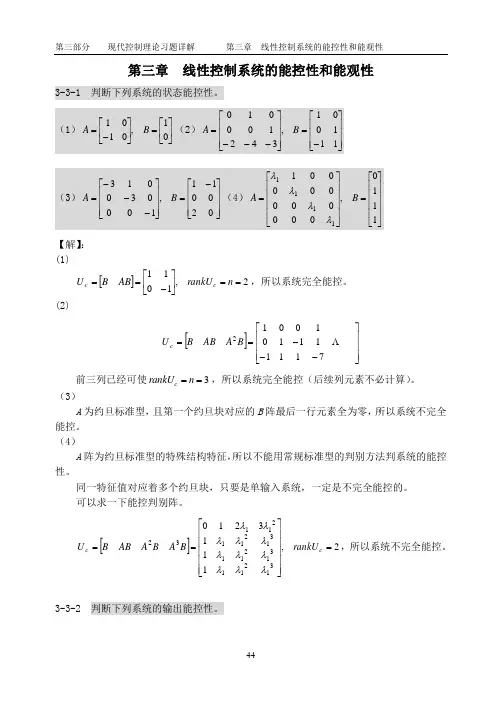
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
第三章 线性控制系统的能控性和能观性在现代控制理论中,能控性和能观性是卡尔曼(Kalman )在1960年首先提出来的,它是最优控制和最优估值的设计基础。
能控性和能观性是分别分析)(t u 对状态)(t x 的控制能力以及输出)(t y 对状态)(t x 的反映能力。
§3-1 能控性的定义能控性所研究的只是系统在控制作用)(t u 的作用下,状态矢量)(t x 的转移情况,而与输出)(t y 无关。
矢量的线性无关与线性相关:如果0x x x x 332211=++++n n C C C C 式中的常数n C C C 21,满足0321====n C C C C ,则把向量n x x ,x 21 叫做线性无关。
例如向量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0102x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1003x 便是线性无关。
若向量n x x ,x 21 中有一个向量i X 为其余向量的线性组合,即:∑≠==nij j jj i C 1x x 则称向量n x x ,x 21 为线性相关。
例如向量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3211x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1012x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=4223x 便是线性相关。
又例如在式中213x x x +=,0x 3x x 321=++式中系数并不全为零。
故为线性相关。
具有约旦标准型系统的能控性判据 1.单输入系统先将线性定常系统进行状态变换,把状态方程的A 阵和B 阵化为约旦标准型)ˆ,ˆ(B A,再根据B 阵确定系统的能控性。
具有约旦标准型系统矩阵的单输入系统,状态方程为bu x x+=λ ,或bu Jx x+= 。
其中:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=n λλλλλ 00321,各根互异。
其中:(特征值有重根的)⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=++n m m J λλλλλλ010010121111 ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n b b b b 21 下面列举两个二阶系统,对其能控性加以剖析。