非精密进近及CDFA标准程序【民用航空器 维修人员精品资料】
- 格式:pptx
- 大小:2.27 MB
- 文档页数:25
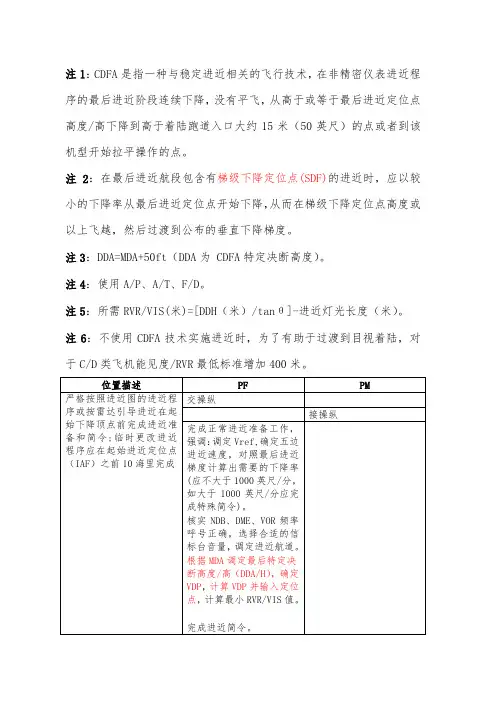
注1:CDFA是指一种与稳定进近相关的飞行技术,在非精密仪表进近程序的最后进近阶段连续下降,没有平飞,从高于或等于最后进近定位点高度/高下降到高于着陆跑道入口大约15米(50英尺)的点或者到该机型开始拉平操作的点。
注2:在最后进近航段包含有梯级下降定位点(SDF)的进近时,应以较小的下降率从最后进近定位点开始下降,从而在梯级下降定位点高度或以上飞越,然后过渡到公布的垂直下降梯度。
注3:DDA=MDA+50ft(DDA为 CDFA特定决断高度)。
注4:使用A/P、A/T、F/D。
注5:所需RVR/VIS(米)=[DDH(米)/tanθ]-进近灯光长度(米)。
注6:不使用CDFA技术实施进近时,为了有助于过渡到目视着陆,对于C/D类飞机能见度/RVR最低标准增加400米。
强调注意:1.VDP点需要在进近准备时算出,并输入FIX页面,以MDA而不是DDA来计算,用插值法计算2.SDF点高度限制,需在MCP板上调出,确保在或高于此点高度限制时调整至下一个较低高度3.最低高度以DDA(MDA+50)向上取整调MCP板高度4.PM需报出FAF后DME对应的高度,PF适量调整下降率5.在MCP板高度上加300英尺调复飞高度6.调定复飞高度后,断开A/P,转入人工飞行,此时可保留指引7.能见目视参考后,开始做目视机动修正横侧及俯仰时,重置指引。
当能见度边缘时,建议晚重置指引,可以保留指引到MDA以下,以提供参考,但最晚不低于HAA200尺8.PM必须报出HAA200英尺,在这一高度必需能见跑道环境,才可以继续进近落地9.复飞,在DDA不能见目视参考,立即实施复飞拉升,飞向复飞点,过MAPT点后再按公布的复飞程序起始转弯。

CDFA飞行方法2013-11-22岑明辉海航股份飞标训练引言:事故数据分析表明,航空器在实施非精密进近时的事故率是实施精密进近时发生的事故率的7倍。
传统的非精密进近方法由于采用梯级下降的剖面,非常容易导致不稳定进近,因此局方推行了连续下降最后进近(CDFA)的方法。
本文就CDFA的理念和飞行方法进行初步探讨,供大家参考。
一.什么是CDFA?CDFA: 连续下降最后进近一种与稳定进近相关的飞行技术,在非精密仪表进近程序的最后进近阶段连续下降,没有平飞,从高于或等于最后进近定位点高度/高下降到高于着陆跑道入口大约15米(50英尺)的点或者到该机型开始拉平操作的点。
二.CDFA特定决断高度/高(DDA/H)使用CDFA技术进近时,为确保航空器在复飞过程中不低于公布的最低下降高度/高,由运营人确定的在公布的最低下降高度/高以上的某一高度/高,当下降至此高度/高时,如果不具备着陆条件,飞行员应开始复飞。
海航关于CDFA的相关规定:波音机型:昼间DDA=MDA+50ft夜航DDA=MDA+220ft以上数值按百英尺向上取整。
空客机型:昼间DDA=MDA+50ft夜航DDA=MDA+220ft以上数值不需取整。
三.哪些运行适用于CDFA飞行方法?CDFA技术适用于公布了垂直下降梯度或下滑角度的非精密进近程序:注:CDFA技术不适用于目视盘旋进近。
对于未公布下降梯度,或未以距离明确FAF的NPA进近程序,CDFA进近方法不适用。
四.CDFA运行有哪些设备要求?除了非精密进近程序所要求的设备外,CDFA技术不需要特殊的航空器设备。
安装有飞行管理系统(FMS)、气压垂直导航(baro-VNAV)、广域增强系统(WAAS)或类似设备的航空器,当从数据库中选定仪表进近程序时,通常会提供公布的垂直下降角(VDA)或下滑角度。
具有飞行航迹角(FPA)模式的航空器允许飞行员根据公布的垂直下降梯度或下滑角度输入一个电子的下滑角。

⾮精密进近程序及要求⾮精密进近程序及要求⽬录:⼀.⾮精密进近要求⼆.⾮ILS进近—V/S⽅式⾃动飞⾏程序三.注意及释义⼀.⾮精密进近要求:1.⾮精密进近时,应以最佳机组⼒量上座,并由机长或在教员监视下履⾏机长职责的飞⾏员操纵飞机;2.在进⼊⾮精密进近前,应明确VDP的位置,如仪表进近图有公布的VDP,则以公布的VDP为准;如没有公布的VDP,则应提前计算出VDP位置,沿公布或推荐的下降轨迹下降,VDP的⾼度应正好为MDA(H);3.选择襟翼5的时机,不应晚于进⼊五边切⼊航向;4.FAF前3海⾥开始放轮、襟翼15并建⽴着陆形态,如FAF太接近跑道,可提前开始上述动作。
应确保稳定进近的要求,⾄少在1000英尺离地⾼度前建⽴着陆形态,同时还应考虑到如过晚建⽴形态,可能会加重机组⼯作负荷。
5.FAF之后应采取连续下降的技术使飞机飞向VDP,如在FAF和VDP之间有公布的限制⾼度,应遵守该⾼度限制。
6.下降过程中,PM应始终协助PF监控⾼度、速度、下降率和测距等各要素,随时报出偏差;7.如未获得⾜够的⽬视参考,任何时候飞机都不得低于MDA(H),即使由于下沉的惯性,复飞时飞机也不应低于MDA(H);8.VDP处于正常着陆剖⾯上,在MDA(H)或以上的⾼度飞越VDP后,即使有⾜够的⽬视参考也不应尝试着陆,因为已经错过了正常的着陆剖⾯;9.运⾏⼿册规定,进近着陆中,断开⾃动驾驶的最晚时机:精密进近为DA(H);⾮精密进近为MDA(H)或复飞点;⽬视进近为150⽶(500英尺);10.程序规定在距MDA(H)以上300英尺时调定复飞⾼度,因此⾃动驾驶V/S⽅式下降,在MDA(H)不会⾃动改平,飞⾏机组应给予MDA(H)⾜够的关注;11.如飞机在穿过MDA(H)后失去了⽬视参考或偏差较⼤,应⽴即执⾏复飞。
12.在此公布的程序和要求考虑了⼤多数⾮精密进近的情况,但不可能全部涵盖,机组在遇到⽆确切说明的情况时,应掌握安全的原则,选择安全余度⼤的⽅案。
飞行训练中非精密进近连续下降最后进近CDFA研究【摘要】通过研究非精密进近连续下降最后进近(CDFA)的实施方法,从而达到在实际飞行中降低进近安全风险,减小飞行员工作负荷,提高经济性等目的。
【关键词】连续下降运行;稳定进近;下降率计算非精密进近,它是有方位引导,但没有垂直引导的仪表进近。
精密进近,是使用精确方位和垂直引导,并根据不同的运行类型规定相应最低标准的仪表进近。
二者之间最大的区别就是,前者没有垂直引导,要靠机组根据飞机离跑道头的距离来计算、检查和调整飞行高度,以控制飞机在规定的“下滑线”上下降。
相对于精密进近,非精密进近没有下滑引导,而且方位的引导也不尽精确,因此计划和执行一次非精密进近是飞行中难度较高的科目之一。
据统计,60%的CFIT 可控撞地飞行事故都发生在非精密进近中下降阶段,航空器在实施非精密进近时的事故率是实施精密进近时发生的事故率的7倍。
不过,我们并不能由此简单地认为,非精密进近不安全或其安全系数不高。
目前非精密进近下降阶段有两种方式:(1)阶级下降方式。
即每过一个STEPDOWN FIX可以直接下到一个较低的高度直到MDA/H。
(2)连续下降方式。
直接从起始进近的高度保持类似ILS的剖面以一个恒定的下降率直到MDA/H。
这两种进近剖面的控制方式的优劣性是显而易见的。
1.阶级下降方式非精密进近有能见度和云高的要求。
如果我们按第一种方式进近,那么从理论上来说过了FAF或最后一个STEPDOWN FIX 阶梯下降定位点(SDF)我们可以“立刻”下降到MDA/H,那么在这种情况下我们不可能看到跑道或继续下降所要求的目视参考,并且都是低于正常的下降剖面,所以只有保持平飞直到能以正常的下降率下降至着陆或到MAPT复飞。
在某些情况下,最后进近定位点后包括梯级下降定位点,仪表进近程序会公布梯级下降定位点和之后相应的垂直下降梯度。
对于最后进近定位点后包括梯级下降定位点的程序,其设计目标是公布一个垂直下降梯度或下滑角度,确保垂直航迹不低于梯级下降定位点的超障高度。
非精密进近要解决的问题一、非ILS 仪表进近-总则1、推荐使用连续下降的方法(CDFA)做进近有利于稳定进近注:在非精密进近不使用CDFA时,运营人的最低标准一般应在局方规定的最低标准之上,对于C、D类飞机,RVR/VIS至少增加400米。
2、非ILS进近的垂直轨迹控制的方式:有两种V/S和VNAV虽然手册中推荐使用VNAV进近,但须注意:VNAV适用于相对精确的坐标系和精确的飞机位置,还要求FMC自带进近程序;而V/S则适用于所有适用于原始导航的情况;使用时要根基实际情况而定3、自动飞行是非ILS 进近的最好飞行方法自动飞行可降低飞行员工作量,并便于监控程序及飞行轨迹。
非ILS 进近过程中,使用自动驾驶可以更准确地保持航道和垂直轨迹,减少无意间偏航低于航道的可能性,推荐使用自动驾驶4、开始进近前要检查原始数据,保证正确导航,可通过下列步骤来完成:(1)按压EFIS 控制面板上的POS 电门,并将地图上的助航符号与显示的原始数据作比较。
例如:VOR 径向线和原始MDE 数据应覆盖在地图上显示的VOR/DME 台,而GPS 位置符号与飞机符号的尖部几乎重合(FMC 位置)配图(2)在地图上显示VOR 和/或ADF5、尽可能的利用地图:尽可能的利用地图,但必须以原始数据为依据,并始终监控6、MDA+50“仅”针对于非ILS进近的“连续下降的方法”(CDFA):对于本身有下滑轨迹角的DA/DH的进近(如:ILS或RNP等)则不需要加50;对于传统的“梯度下降方法”也不需要加50。
7、设置MDA+50的位置:仅在“气压最低值选择钮”上设置MDA+508、MCP板的高度设置不变:仍以MDA向上取整作为设置基准,而不是MDA+50向上取整作为设置基准9、调复飞高度的时机为MDA+300之前:大队统一规定无论V/S方式还是VNAV方式都在接近MDA+300之前调复飞高度;VNAV方式调复飞高度时还要求,飞机高度低于复飞高度300尺以后调复飞高度10、断开自动驾驶的时机:不晚于MDA+300断开A/P过晚的得A/P断开,会造成在复飞时的慌乱11、重置指引的时机:建立目视以后,到达MDA高度时或之前。
非精密进近CDFA连续下降最后进近事故数据分析表明,航空器在实施非精密进近时的事故率是实施精密进近时发生的事故率的7倍。
其中一个重要的原因是:按照包含梯级下降定位点的程序飞行(即没有稳定梯度下降的飞行)需要飞行员在通过最后进近定位点以后多次调整航空器的推力、俯仰姿态和高度,这些调整增加了在飞行关键阶段飞行员的工作负荷和发生差错的可能性;国际民航组织《空中航行服务程序-航空器的运行》文件中规定:稳定进近时,航空器必须在特定高度上处于稳定的状态。
作为优化的进近技术,稳定状态不应只存在于特定的位置,而是应处于持续的状态,即在进入最后进近航段之后尽早达到稳定状态。
使用固定下降角的进近剖面可以提供一个更稳定的飞行航迹,通过减少飞行机组的工作负荷达到降低非精密进近风险的目的。
优化的着陆机动飞行要求航空器以稳定状态到达决断高度或某一点,以便给飞行机组足够的时间来评估目视参考,从而决定是着陆还是复飞。
精密仪表进近程序和类精密进近(APV)程序在设计时均包含一段连续下降的进近下降剖面。
非精密进近原本没有设计这一下降剖面,但是应用CDFA技术更易于操作,为提高非精密进近的安全水平,运营人应该制定标准操作程序,训练和要求飞行员使用CDFA技术。
此处需要强调的是:各机型(即使是只具备基本导航能力的机型)均能够使用CDFA技术。
连续下降最后进近(CDFA)的相关定义1 ,一种与稳定进近相关的飞行技术,在非精密仪表进近程序的最后进近阶段连续下降,没有平飞,从高于或等于最后进近定位点高度/高下降到高于着陆跑道入口大约15米(50英尺)的点或者到该机型开始拉平操作的点。
2 ,稳定进近稳定进近的特征是保持恒定俯仰角和下降率的进近垂直航迹直至起始着陆动作。
飞越最后进近定位点后,在下降至低于最低稳定进近高度/高之前建立着陆形态、合适的进近速度、推力调定和航迹!3,CDFA特定决断高度/高(DDA/H)使用CDFA技术进近时,为确保航空器在复飞过程中不低于公布的最低下降高度/高,由运营人确定的在公布的最低下降高度/高以上的某一高度/高,当下降至此高度/高时,如果不具备着陆条件,飞行员应开始复飞。
国航股份波音机型CDFA非精密进近程序
注1:CDFA的飞行方法是以精密进近的方法来飞非精密进近。
注2:在最后进近航段包含有梯级下降定位点(SDF)的进近时,应以较小的下降率从最后进近定位点开始下降,从而在梯级下降定位点高度或以上飞越,然后过渡到公布的垂直下降梯度。
注3:DDA=MDA+50ft(DDA为CDFA特定决断高度)。
注4:使用A/P、A/T、F/D。
注5:下降率的控制:使用VNAV方式,参考FMC数据库。
使用V/S方式,参考仪表进近图确定下降率。
位置描述PF PM
A:
跑道头
调定推力约40%N1,稳定。
按TO/GA电门,下口令:
“调定起飞推力”。
“稳定”。
人工调整起飞推力;“起飞推力调定”,监。
非精密进近要解决的问题(大队版)非精密进近要解决的问题一、非ILS 仪表进近-总则1、推荐使用连续下降的方法(CDFA)做进近有利于稳定进近注:在非精密进近不使用CDFA时,运营人的最低标准一般应在局方规定的最低标准之上,对于C、D类飞机,RVR/VIS至少增加400米。
2、非ILS进近的垂直轨迹控制的方式:有两种V/S和VNAV虽然手册中推荐使用VNAV进近,但须注意:VNAV适用于相对精确的坐标系和精确的飞机位置,还要求FMC自带进近程序;而V/S 则适用于所有适用于原始导航的情况;使用时要根基实际情况而定3、自动飞行是非ILS 进近的最好飞行方法自动飞行可降低飞行员工作量,并便于监控程序及飞行轨迹。
非ILS 进近过程中,使用自动驾驶可以更准确地保持航道和垂直轨迹,减少无意间偏航低于航道的可能性,推荐使用自动驾驶4、开始进近前要检查原始数据,保证正确导航,可通过下列步骤来完成:(1)按压EFIS 控制面板上的POS 电门,并将地图上的助航符号与显示的原始数据作比较。
例如:VOR 径向线和原始MDE 数据应覆盖在地图上显示的VOR/DME 台,而GPS 位置符号与飞机符号的尖部几乎重合(FMC 位置)配图(2)在地图上显示VOR 和/或ADF5、尽可能的利用地图:尽可能的利用地图,但必须以原始数据为依据,并始终监控6、MDA+50“仅”针对于非ILS进近的“连续下降的方法”(CDFA):对于本身有下滑轨迹角的DA/DH的进近(如:ILS或RNP等)则不需要加50;对于传统的“梯度下降方法”也不需要加50。
7、设置MDA+50的位置:仅在“气压最低值选择钮”上设置MDA+508、MCP板的高度设置不变:仍以MDA向上取整作为设置基准,而不是MDA+50向上取整作为设置基准9、调复飞高度的时机为MDA+300之前:大队统一规定无论V/S方式还是VNAV方式都在接近MDA+300之前调复飞高度;VNAV方式调复飞高度时还要求,飞机高度低于复飞高度300尺以后调复飞高度10、断开自动驾驶的时机:不晚于MDA+300断开A/P过晚的得A/P断开,会造成在复飞时的慌乱11、重置指引的时机:建立目视以后,到达MDA高度时或之前。